履带伸缩臂起重机有限元模态对比分析
- 格式:docx
- 大小:27.41 KB
- 文档页数:3
电动履带起重机伸缩臂受力分析
郭柏树;柳海芳;蒋伟
【期刊名称】《建设机械技术与管理》
【年(卷),期】2024(37)3
【摘要】本文以FWT100电动伸缩臂起重机为载体简单介绍了伸缩臂的结构组成和伸缩原理,通过有限元分析法,对伸缩臂进行强度和刚度分析,将计算结果与实验数据进行比较,确定了有限元法在吊臂计算中的可行性。
【总页数】2页(P30-31)
【作者】郭柏树;柳海芳;蒋伟
【作者单位】辽宁抚挖重工机械股份有限公司
【正文语种】中文
【中图分类】H213.7
【相关文献】
1.伸缩臂履带起重机带载行驶下臂架应力状态分析
2.伸缩臂履带起重机回转时臂架应力状态分析
3.伸缩臂履带起重机直线行驶工况下臂架应力状态分析
4.100t伸缩臂履带式起重机臂架结构设计和优化分析
5.履带伸缩臂起重机有限元模态分析
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车起重机伸缩臂结构有限元分析及优化汽车起重机伸缩臂结构有限元分析及优化引言:汽车起重机作为一种重要的工程机械设备,在建筑、物流等行业中起着重要的作用。
而在汽车起重机的设计中,伸缩臂结构是其关键组成部分之一。
伸缩臂结构的合理设计和优化可以提高汽车起重机的工作效率和承载能力,降低其重量和成本。
因此,对汽车起重机伸缩臂结构进行有限元分析与优化具有重要的理论意义和实际应用价值。
1. 伸缩臂结构的设计和工作原理汽车起重机的伸缩臂结构由伸缩臂筒、伸缩臂滑块、伸缩臂大臂、伸缩臂小臂等组成。
其工作原理是通过液压系统控制伸缩臂筒的伸缩,从而实现伸缩臂的变化和起重高度的调节。
伸缩臂结构的设计直接影响汽车起重机的工作性能和稳定性。
2. 有限元分析的原理和方法有限元分析是一种数值分析方法,通过将结构离散化为有限个小元素,利用数学和力学原理对每个小元素进行计算,最后得到整个结构的应力、应变、位移等相关信息。
有限元分析方法可以精确计算伸缩臂结构在不同工况下的受力情况,为优化设计提供基础。
3. 初始结构的有限元分析首先,采用有限元分析方法对汽车起重机初始伸缩臂结构进行分析。
通过初始结构的有限元模型建立和边界条件的设定,计算得到伸缩臂结构在不同工况下的受力情况,包括应力、应变、变形等参数。
利用有限元分析结果,可以评估初始结构的工作性能,并确定需要改进的方向。
4. 结构优化设计与分析基于初始结构的有限元分析结果,可以进行伸缩臂结构的优化设计。
结构优化的目标是提高结构的工作效率和承载能力,降低结构的重量和成本。
通过在有限元模型中进行参数化设计和分析,可以获得不同设计方案下的结构性能指标。
综合考虑结构的强度、刚度、轻量化等因素,选择最优设计方案。
5. 优化设计的验证与验证对优化设计方案进行验证与评估是优化过程的重要环节。
通过将优化设计方案转化为实际工艺制造过程中的参数,并制作样件进行实际测试和评估,可以验证优化设计方案的有效性,并进一步优化设计方案。
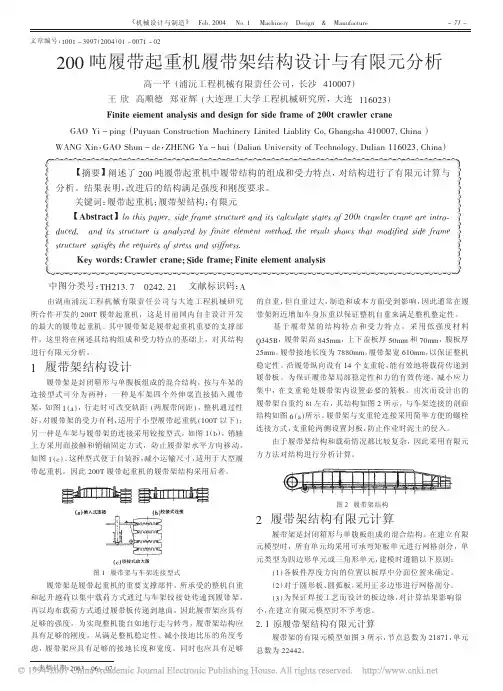
设・计计!算Design and Calculation第38卷2007年9月工程机械箱形伸缩式吊臂结构由于结构紧凑、空间刚度大、抗扭性能好,广泛应用于汽车起重机中。
伸缩式吊臂多数制成矩形截面的箱型结构,箱体结构内装有伸缩液压缸,在吊臂的每个外节段内装有支承内节的滑块支座,各节臂之间可以相对滑动;吊臂根部与转台铰接,靠近吊臂根部装有变幅液压缸,可实现吊臂在变幅平面内自由转动。
吊臂是一个主要承受轴向压力、弯矩,以及转矩的构件。
吊臂的常规设计计算通常的方法是将吊臂结构视为梁模型进行强度及刚度等方面的分析。
使用有限元法计算易于电算化,并且商业有限元软件功能强大,技术上非常成熟,所以在吊臂力学分析中运用越来越多。
纪爱敏等[3、4]使用ANSYS 的板壳模型对QY25、QAY125型汽车起重机的吊臂进行有限元分析,获得了比较准确的结果,并与试验结果相符;吴晓[5]、王立彬[6]、靳慧[7]均使用super SAP 的板单元分别对SQTJ160型铁路救援起重机、100t 铁路起重机的吊臂进行分析,得出吊臂受力最不利的工况位置,并与试验结果进行对比,提出改进建议。
蒋红旗等[7、8]使用ANSYS 的实体单元对QD20型起重机吊臂、高空作业车作业臂进行有限元分析,提出了吊臂设计改进意见。
但在上述建模过程中,过多的模型细节将使板壳、实体平面琐碎,必须通过GLUE 命令使其边界条件连续,而且容易导致局部网格过密,增加建模过程复杂程度,加大计算成本,降低工作效率。
起重机在一般情况下只要求计算结构的静态刚度和应力强度校核,为了提高有限元分析效率,在ANSYS 中利用自定义截面单元直接建立梁模型进行有限元计算,并与理论解析解进行比较,计算结果较为精确,具有实际参考意义。
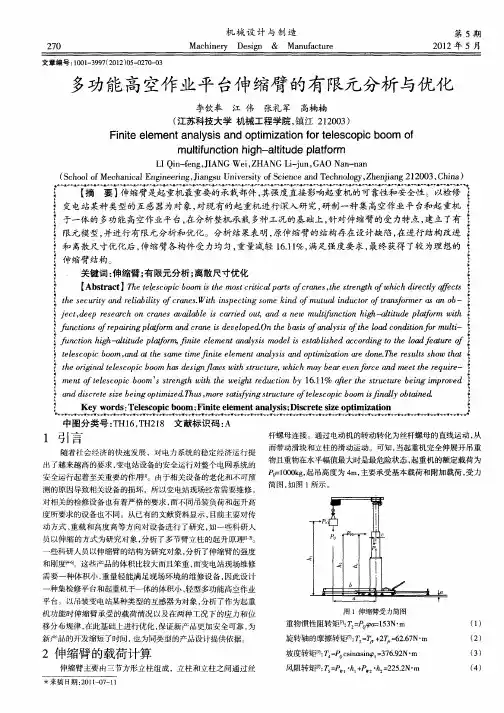
1计算工况及受载分析以Q2-16型汽车起重机为例,在三节吊臂全伸(20m ,工作幅度R=4.25m (吊臂仰角!=79°,吊重Q=60kN ,吊臂自重G 0=2.5kN 的工况下进行计算。
履带起重机臂架结构优化设计及有限元研究摘要:履带起重机臂架结构设计方面,还要采用先进的科学技术方法完成结构优化设计,以提高起重机设计水平。
基于这种认识,本文采用粒子群算法实现臂架结构的优化设计,以实现臂架结构的轻量化设计。
关键词:履带起重机臂架结构;粒子群优化算法;有限元分析方法1履带起重机臂架的结构分析对臂架结构进行分析可以发现,其采用的是空间弦杆桁架式结构,利用滑轮组进行变幅。
从臂架受力情况来看,在危险截面上,臂架将受到变幅拉索力、起升载荷、绳拉力和自重等力的合力作用[1]。
在回转平面上,臂架将受到惯性力、风力和偏摆力等力的侧向集中力作用。
2履带起重机臂架结构的优化设计2.1优化设计的概念在履带起重机设计的过程中,臂架结构设计至关重要,需要根据经验完成结构方案和尺寸的选择,然后进行结构性能校正。
就目前来看,在优化设计方面,能够采用的算法有较多,就是要结合设计对象的数学模型特点及各种算法的优缺点,在一定的适用范围内进行合理算法的选取。
2.2优化设计方法履带起重机臂架结构的设计,可以利用一组基本参数数值确定,进行优化设计,就是为了获得设计变量的最优组合。
根据各设计变量间关系,可以得到反映关系的表达式,即目标函数,可用于完成问题好坏的评价,并且能够完成变量的计算。
在优化设计中,还要重点确定目标函数,以确保优化设计质量和优化速度,需按照固定准则建立函数。
在问题解决目标相互矛盾时,则要以主要目标为目标函数,其余指标为约束条件。
根据履带起重机臂架结构的数学模型可知,模型求解问题为多变量、非线性和多约束的问题,需要利用粒子群算法进行求解。
求解臂架结构优化问题,采用粒子群算法可以更加简洁的完成问题求解,无需进行原本设计参数的调整,同时还能在早期进行快速收敛,所以能够简化相关问题。
所谓的粒子群算法,其实就是群体智能全局随机搜索算法,能够从随机解的角度着手,采用迭代的方法完成复杂空间中全局最优点的寻找。
2.3优化模型的建立在对臂架结构进行优化设计时,设计目标即实现臂架结构轻量化,需要在满足各种约束条件的基础上,使臂架重量保持最轻。
收稿日期:2004207215作者简介:周慎杰(19582),男,山东莱州人,教授,博士生导师.主要研究方向为机械装备数值模拟方法及CAE 技术.E 2mail :zhousj @ 文章编号:167223961(2005)0120022205履带起重机臂架有限元分析方法周慎杰1,王锡平2,李文娟2,王 凯1(1.山东大学 机械工程学院, 山东 济南 250061;2.山东大学 土建与水利学院, 山东 济南 250061)摘要:根据桁架钢结构的受力特点,采用变截面梁单元模拟起重机臂架整体结构,建立了一种有限元简便分析方法,对履带起重机臂架结构的受力状况和应力特性进行了系统地分析,确定了危险工况.对危险工况在各载荷组合作用下臂架结构的应力分布进行了详细的有限元法分析,并对其强度进行了评定.结果表明,有限元简便分析方法可以反映臂架的整体应力状态,而有限元详细分析则可更好地反映臂架受力的局部特性.关键词:起重机;臂架;有限元分析中图分类号:TH212 文献标识码:AThe f inite element analysis for the boom and jib of cra w ler cranesZHOU Shen 2jie 1, WAN G Xi 2ping 2, L I Wen 2juan 2, WAN G Kai 1(1.School of Mechanical Engineering , Shandong University , Jinan 250061, China ;2.School of Civil Engineering , Shandong University , Jinan 250061, China )Abstract :According to the loading characteristics of lattice structure ,a simple finite element analysis method is presented for the boom and jib of cranes.The finite element analysis model is established by ANSYS and static analysis is made for the boom and jib under multi loading conditions.The results show that the simple finite element analysis method can give the effective overall stress distribution ,while the detailed finite element analysis method can obtain local characteristics of stress distribution.K ey w ords :crane ;boom ;finite element analysis0 引言 自拆装全液压履带起重机因具有运输快捷、组织迅速、移动方便、操纵灵活平稳的特点受到广泛重视【1】.履带起重机作为特种设备,其安全性一直是人们所关心的重点问题.臂架是起重机主要的承载部件,臂架的静动态受力特性对起重机安全性有重要的影响【2,3】.履带起重机的臂架组合方式多,载荷复杂,无论采用工程分析方法还是采用有限元方法,全面分析其受力特性都是非常麻烦的事情.以往研究中多是凭经验选取几种典型工况,只分析典型工况的臂架受力特性,对起重机整个工作过程中臂架的受力状态缺乏全面的认识【4】.因此,有必要探讨既能反映臂架受力状况和应力特性,计算量又少的分析方法.本文作者基于桁架结构设计工程算法,提出了适合桁架结构的简便有限元分析方法.以80t 全液压自拆装履带起重机为研究对象,对臂架的受力特 第35卷 第1期 Vol.35 No.1 山 东 大 学 学 报 (工 学 版)J OURNAL OF SHANDON G UN IV ERSITY (EN GIN EERIN G SCIENCE )2005年2月 Feb.2005 性及强度进行分析和评定,并根据简便分析结果,对臂架强度做详细的有限元分析,为臂架设计提供理论依据.1 计算工况与载荷80t 全液压自拆装履带起重机有2种工作形式,即主臂作业的标准型和主、副臂组合作业的塔机型,如图1所示.主臂作业时,起升载荷1.5~80t ,臂长12.2~57.9m ,回转半径4~45m ,共有246种组合.塔机作业时,起升载荷1.5~15t ,主臂长25.9~44.2m ,副臂长19.8~35.1m ,回转半径8.2~48m ,主臂、副臂可组合成544种组合.综合考虑臂长、回转半径、起升载荷及工作状况等因素,从这几百种组合中选取20种组合工况.它们包括标准型和塔机型的最大起升载荷及其相应的中间和最大回转半径工况,臂架最长相应的最大起升载荷、中间和最大回转半径工况,最大回转半径及其相应的最大起升载荷和中间回转半径工况,以及自扳起中可能出现最大拉索力的工况.这20种工况能全面反映所有组合形式臂架的受力特性.图1 起重机工作形式Fig.1 Structural types of crawler crane履带起重机作业条件的多变性使臂架的受载荷比较复杂,臂架设计计算时需要考虑的载荷包括自重载荷、起升载荷、冲击载荷、动载荷、行走与回转时臂架和起升物的惯性力、地面坡度载荷、工作和非工作风载荷、静动态试验载荷等.各种载荷按起重机设计规范要求计算.作安装用的、使用轻闲的履带起重机其臂架动载荷系数按下式计算【5】φ2=1+0.17V(1)其中V 为起升速度.考虑各种载荷对臂架结构可能产生最不利的影响,将上述载荷组合成7种计算载荷组合,包括2种基本载荷组合、2种考虑附加载荷的组合和3种考虑特殊载荷的组合.2 桁架结构有限元简便分析方法起重机主、副臂均是用钢管焊制成的空间桁架结构,弦杆主要承受臂架的拉压力和弯矩,腹杆主要承受臂架的剪力.臂架的工程设计方法将臂架作为整体结构处理,通过分析结构受力,按下式计算弦杆中的应力【6】σ=N /4A i +M x /2A i b +M y /2A i c.(2)其中N 为轴向力,M x 为变幅平面内的弯矩,M y 为回转平面内的弯矩,A i 为弦杆的净截面面积,b 为臂架变幅平面内弦杆中心距离,c 为臂架回转平面内弦杆中心距离.当臂架的长细比大于一定值时,对基本弯矩M x ,M y 乘以1/(12N/0.9N E )予以放大,以考虑二阶弯矩的影响,这里N E 为臂架的欧拉临界载荷.算式(2)的形式与梁结构的应力计算公式相似,基于此,作者将臂架的工程算法与有限元技术相结合,提出用变截面梁模拟整体桁架的有限元简便分析方法.分析时,对臂架头部结构(滑轮组、拉索等)按受力等效原则简化,按等效于桁架式臂架的应力与内力关系(2)式的原则确定变截面梁的截面参数.利用ANSYS 通用有限元软件的参数化语言实现了臂架的有限元简便分析.各种组合结构仅需很少的单元就可模拟整个臂架结构,计算量非常小.根据计算结果,可对臂架的受力性能进行分析和评定.在自重、起升、冲击、动载荷、行走惯性力等载荷组合下,几种典型组合臂架的承载荷性能随回转半径的变化情况如图2~5所示.分析结果表明,标准型和塔机型作业形式的臂架强度最危险工况均为相应的最大起升载荷工况.图2 基本主臂不同回转半径的安全系数g.2 Relation between safety factors and radii for basic boom 第1期周慎杰,等:履带起重机臂架有限元分析方法23图3 最长主臂不同回转半径的安全系数Fig.3 Relation between safety factors and radii for thelongest boom图4 塔式最大起升载荷主臂不同回转半径的安全系数ig.4 Relation between safety factors and radii for the towerboom under maximum lifting load图5 塔式最大起升载荷副臂不同回转半径的安全系数Fig.5 Relation between safety factors and radii for the flyboom under maximum lifting load3 臂架有限元分析3.1 有限元建模在臂架的有限元简便分析基础上,有必要选取合适的单元模拟臂架细部结构,对臂架的危险组合详细地进行有限元分析.有限元模型建立时,忽略辅助连接板和焊缝局部结构,用起升载荷代替起升钢丝绳的作用,不计臂架的制造误差和钢管壁厚偏差;将臂架各节之间弦杆的销轴连接似为固接,将弦杆上的近距离腹杆节点合并;支承臂架的车体视为刚体,臂架的变形与底座无关.塔机型结构中的主臂和副臂分别计算,副臂对主臂的作用通过在相应部位施加作用力的方式予以考虑.用梁单元模拟臂架的弦、腹杆件;用板单元模拟臂架头部和根部的加强板;用杆单元模拟变幅钢丝绳和拉索,其材料性能视为常值.单元离散因臂架组合结构不同而异,如主臂基本工况离散成2个杆单元、277个梁单元、644个板单元,单元离散如图6(a )所示;塔机型结构中的塔臂离散成2个杆单元,603个梁单元,42个板单元,单元离散如图6(b )所示.图6 臂架单元离散Fig.6 Discretization of booms 弦杆钢管材料弹性模量2.13×105MPa ,强度极限780MPa ,屈服极限675MPa.腹杆钢管和加强板材料的弹性模量2.1×105MPa ,强度极限590MPa ,屈服极限325MPa.拉索弹性模量取为4.2×104MPa.所有材料的泊松比均取0.3.3.2 载荷与约束处理计算载荷按载荷组合以产生最不利作用的方式施加.具体处理方案为:计入冲击载荷系数影响的结构自重载荷以重力加速度的方式施加;考虑动载荷系数影响的起升载荷以分布载荷施加于滑轮轴上;起升绳拉力以等效集中力施加于滑轮轴上;起升物惯性力以集中力施加于滑轮轴上;臂架惯性力在相应方向上以加速度的方式施加;坡度使臂架偏斜一定的角度而改变了臂架的受力,坡度载荷的施加按偏斜角度对有关载荷进行分解后施加;水平风载荷对臂架受力影响很小,不予考虑,仅考虑垂直风载荷,对同风向垂直的杆件以分布载荷施加,其它杆件以等效节点力施加于相应的节点上.为模拟臂架根 24 山 东 大 学 学 报 (工 学 版)第35卷 部与机台及副臂与塔臂之间的双销轴连接,释放绕销轴的转动自由度并释放其中一连接点沿销轴方向的移动自由度.3.3 计算结果与分析采用ANSYS 软件实施臂架的有限元建模和计算.在基本载荷组合作用下基本主臂和塔臂的变形结果如图7,8所示.臂架杆件的应力按拉(或压)与弯曲组合计算,各载荷组合下臂架弦、腹杆中的应力最大绝对值见表1~3.基本臂架弦杆的应力较大值出现在臂头与臂根交接处和臂头加强板下部,腹杆的应力较大值出现在臂头加强板下部和与臂根加强板相连部位.在臂头与臂根交接处,弦杆方向改变引起附加弯矩,使局部应力增大,如在载荷组合1,3,5,6作用下最大应力均出现于该处.在臂头加强板下部臂架受拉索的影响,其所承受的弯矩和剪力均较大,因而各种载荷组合下该部位的弦、腹杆的应力都较大.图7 基本臂架变形图Fig.7 Deflection of the basic boom图8 塔臂变形图Fig.8 Deflection of the tower boom表1 基本臂架应力和安全系数Tab.1 Stresses and safety factors of basic boom 组合单元主弦杆应力/MPa安全系数单元腹杆应力/MPa安全系数要求安全系数1712-330.8 1.84623-164.2 1.982765-323.2 1.88570-161.8 2.01 1.503712-330.6 1.84623-163.8 1.984765-323.4 1.88570-161.9 2.01 1.335710-380.7 1.60570-202.0 1.616710-347.1 1.75570-183.9 1.767696-100.0 6.1037-64.15.071.15表2 塔机型主臂应力和安全系数Tab.2 Stresses and safety factors of tower boom 组合单元主弦杆应力/MPa安全系数单元腹杆应力/MPa安全系数要求安全系数1270-257.8 2.36164-54.55.962270-361.9 1.68164-165.2 1.96 1.503270-271.0 2.25164-59.35.474270-380.9 1.60150-198.0 1.64 1.335270-282.7 2.15164-56.1 5.796270-288.0 2.12164-61.9 5.257106-298.6 2.04162194.31.671.15表3 塔机型副臂应力和安全系数Tab.3 Stresses and safety factors of fly boom组合单元主弦杆应力/MPa安全系数单元腹杆应力/MPa安全系数要求安全系数1208-242.7 2.52118467.7 4.802384-316.9 1.92503-77.3 4.20 1.503208-243.4 2.50118169.7 4.664384-325.3 1.87503-79.4 4.09 1.335208-262.2 2.32118473.9 4.396208-267.5 2.28118177.3 4.207208-75.58.07504-21.515.11.15 塔机作业时,副臂的受力特性与主臂非常相似,即在弦杆方向变化处(臂头与标准节、臂根与变截面过渡处)和臂头加强板下部弦杆的应力较大,但副臂较长,回转惯性力的影响比较明显,在载荷组合2,4作用下杆中的应力最大.塔臂头对副臂和副臂变幅支架起支撑作用,并受拉索的作用,受力比较复杂,弦杆最大应力出现在该处,而腹杆的最大应力出现在与臂根加强板相连的杆件中.比较有限元简便分析和细化分析结果说明,2种方法的最大应力基本一致. 第1期周慎杰,等:履带起重机臂架有限元分析方法25 各载荷组合作用下臂架结构的强度储备可用安全系数表示,安全系数的具体计算结果见表1~3.由表可见,主臂作业和塔式作业时主臂的弦杆、腹杆以及副臂弦杆的计算安全系数均大于要求值且接近,说明强度储备较合理,而副臂腹杆的计算安全系数远大于要求值,强度储备偏大.有限元计算结果表明,臂架结构总体设计合理,强度满足要求.4 结束语根据空间桁架结构的受力特点,基于工程算法所建立的有限元简便分析方法用变截面梁模拟臂架整体结构,仅需要很少的单元,计算量非常小.该方法可以用来分析臂架的整体应力分布特性,在臂架初步设计时可对臂架的受力特性进行合理的评定.而作为臂架设计的最终评定依据,进行有限元详细分析是必要的,其结果可很好地反映臂架受力的局部应力特性.参考文献:[1]王欣,邢玉生,孙长德,等.履带起重机总体设计软件的开发与应用[J].起重运输机械,2000,(8):123.W ANG X in,XING Y u2sheng,SUN Chang2de,et al.Development and application of the overall design software for crawler cranes[J].Hoisting and Conveying Machinery, 2000,(8):123.[2]FISHER J M,THOMAS S J.Design concepts for jibcranes[J].Engineering Journal,2002,39(2):74285.[3]CHIN C M,NA YFEH A H,MOO K D T.Dynamics andcontrol of ship2mounted cranes[J].Journal of Vibration and Control,2001,7(6):8912904.[4]张洪,陈守礼,胡海平,等.大型履带起重机臂架的静强度分析[J].太原重型机械学院学报,1992,13(1):85291.ZHAN G Hong,CHEN Shou2li,HU Hai2ping,et al.Stat2 ic analysis for the boom of large crawler cranes[J].Journal of Taiyuan Heavy Machinery Institute,1992,13(1):85291.[5]G B3811283,起重机设计规范[S].G B3811283,Design rules for cranes[S].[6]徐格宁.起重运输机金属结构设计[M].北京:机械工业出版社,1997.XU G e2ning.Metal structural design for hoisting and conveying machinery[M].Beijing:China Machine Press, 1997.(编辑:陈燕)(上接第21页)[5]王秋成.航空铝合金构件残余应力的控制与测试技术研究[D].杭州:浙江大学机能学院,2004.WAN G Qiu2cheng.Evaluation and control of residual stresses in high strength aluminum alloys for aircraft structures[D].Hangzhou:College of Mechanical& Energy Engineering,Zhejiang University,2004.(编辑:陈燕) 26 山 东 大 学 学 报 (工 学 版)第35卷 。
履带伸缩臂起重机有限元模态对比分析
摘要:针对履带式伸缩臂起重机,建立了整机三维模型,提出了模型简化方案。
利用ABAQUS软件对起重机在额定工况下有吊载和无吊载的整机模型进行了模态
分析,得出了10阶共振频率和振型。
对两个模型的模态进行对比分析,得出了
起重机起吊后的模态变化,为避免共振现象的发生提供了理论依据。
关键词:履带式伸缩臂起重机、模态分析、有限元法、整机
0.引言
履带式伸缩臂起重机不仅拥有履带式底盘附着力大、转换方便、带载行走的
特点,还结合了伸缩臂架自由调节长度的优点,在当今施工领域具有广泛的应用
市场。
为提高公司自主研发的ZTCC550履带式伸缩臂起重机的产品质量,提高产
品的安全性能,本文应用ABAQUS软件对起重机进行了计算模态分析,对比了有
吊载和无吊载情况下起重机整机模态,为起重机在极限工况下避免共振提供了帮助。
1. 有限元模型建立和简化
本文的研究对象为为我公司所设计的ZTCC550履带式伸缩臂起重机的整机模型,基本结构如图1所示[1]。
图1 ZTCC550起重机结构简图
起重机的最大额定载荷为55t,整车整备重量为63t;伸缩臂由5节臂组成,
为U型截面,全伸臂长40.3m;采用履带式底盘,履带架可自由展开,搭载自卸
式配重,可360回转。
本文主要分析最大起重量工况下的起重机模态:主臂全缩,吊臂仰角为74°,起吊载重为55吨。
为了得到更加准确的模态分析结果,对模型进行简化是一个重要环节[2]。
本
文针对履带起重机的结构特点对其进行了模型简化:
①钢丝绳和吊钩省略,主臂上不受力的辅助件省略,3、4、5节臂受力等效
作用在各滑轮上;
②两组卷扬卷筒在安装位置(大致的几何中心,可选择卷筒轴线的中点)施
加刚性拉力(适当考虑钢丝绳质量);
③所有原动/驱动部件总成均简化成集中质量,如发动机、油泵等。
④各液压缸简化成一维刚性单元或高刚度单向弹簧单元(据长度、等效截面积、推力确定刚度),两端由铰接或安装位置而定,等效质量在一维单元两端分
布施加;
⑤驾驶室、上下车配重装置简化成集中质量等效作用在铰接点处;
⑥控制系统、液压小元件及管路省略,小型小质量标准件省略;
⑦各焊接部位需要对焊缝进行处理,填平各坡口,保证焊接部位的连续性。
关键部位(主臂、回转台、底座、履带架等)需要增加角焊缝对连接部位进行强化。
本文为了对比在最大起重量工况下有吊载和无吊载的起重机模态,仅在臂架
头加载不同集中质量以示区别:对于无吊载的工况,臂头仅加载吊钩载荷1.1t;
对于有吊载的工况,臂头加载55t。
起重机优化后的整机模型如图2所示。
图2 起重机整机CAE模型
网格划分时,对钢板框架用板壳单元进行网格划分,保留了框架箱体所有的
几何形体特征,其余部位采用三维实体单元进行网格划分。
2. 计算模态分析
将建立好的模型导入ABAQUS软件,起重机主体材料设置为Q345A,密度为7800 kg/m3,弹性模量为2.1×1011Pa,泊松比为0.3。
起重机臂架设置为80号高
强度钢,其密度为7810 kg/m3,弹性模量为2.0×1011Pa,泊松比为0.3[3]。
模态分析中只有零位移约束[4],及只约束履带与地面接触6个方向自由度。
本文计算出了的起重机前20阶模态固有频率及振型,展示了有、无吊载两种工况下的前5阶振型图,并在表1种展示了两种工况的前10阶的固有频率及振
型对比结果。
图2无吊载第1阶振型图3有吊载第1阶振型
图4无吊载第2阶振型图5有吊载第2阶振型
图6无吊载第3阶振型图7有吊载第3阶振型
图8无吊载第4阶振型图9有吊载第4阶振型
图10无吊载第5阶振型图11有吊载第5阶振型
表1 无吊载时起重机前10阶模态
表2 有吊载时起重机前10阶模态
通过对起重机的两种工况模态分析结果可知,在有吊载的情况下,起重机的模态
发生明显变化。
有吊载时前几阶固有频率值明显小于无吊载状态下的固有频率值;对比第一阶模态,主臂振幅无吊载要比有吊载的大;有吊载时伸缩臂几乎在所有
阶次模态下都会出现振动现象;无吊载时,伸缩臂并不参与所有阶次的振动。
起重机实际工作中,发动机的转动、伸缩臂的变幅过程、回转台的互转运动、卷筒的回转都是主要振动源。
通过前文模态对比结果可知,对于低频振动源,起
重机在有吊载的情况下,更容易达到共振频率,产生共振几率更大。
3.结论
1)本文对在额定载荷状态下的ZTCC550履带式伸缩臂起重机进行了三维建模,提出了模型简化方案。
2)对起重机模型在有吊载和无吊载两种状态下进行了模态分析,得出了前
10阶共振频率和振型。
3)对比分析了有吊载和无吊载两种状态的起重机模态,为实际工程中避免共振现象的发生提供了参考依据。
参考文献:
[1]刘洋,杨兵宽,林瀚.履带式伸缩臂起重机整机有限元分析[J].工业(2):
59-60.
[2]张明旭,尹志宏,刘晓东,et al. 结构几何简化对模态结果的影响[J]. 起重
运输机械,2009(3).
[3]范祖尧.现代机械设备设计手册[M].北京:机械工业出版社,1998.
[4]蒋红旗. 起重机吊臂有限元模态分析[J]. 拖拉机与农用运输车(6):35-36.。