微动开关说明
- 格式:docx
- 大小:491.39 KB
- 文档页数:41

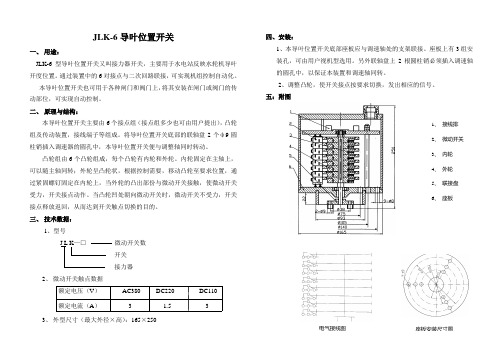
JLK-6导叶位置开关一、用途:JLK-6型导叶位置开关又叫接力器开关,主要用于水电站反映水轮机导叶开度位置。
通过装置中的6对接点与二次回路联接,可实现机组控制自动化。
本导叶位置开关也可用于各种闸门和阀门上,将其安装在闸门或阀门的传动部位,可实现自动控制。
二、原理与结构:本导叶位置开关主要由6个接点组(接点组多少也可由用户提出),凸轮组及传动装置,接线端子等组成。
将导叶位置开关底部的联轴盘2个ф9圆柱销插入调速器的圆孔中,本导叶位置开关便与调整轴同时转动。
凸轮组由6个凸轮组成,每个凸轮有内轮和外轮。
内轮固定在主轴上,可以随主轴同转;外轮呈凸轮状,根据控制需要,移动凸轮至要求位置,通过紧固螺钉固定在内轮上,当外轮的凸出部份与微动开关接触,使微动开关受力,开关接点动作。
当凸轮凹处朝向微动开关时,微动开关不受力,开关接点释放返回,从而达到开关触点切换的目的。
三、技术数据:1、型号J L K—□微动开关数开关接力器2、微动开关触点数据额定电压(V)AC380 DC220 DC110 额定电流(A) 3 1.5 3 3、外型尺寸(最大外径×高):165×250 四、安装:1、本导叶位置开关底部座板应与调速轴处的支架联接。
座板上有3组安装孔,可由用户视机型选用。
另外联轴盘上2根圆柱销必须插入调速轴的圆孔中,以保证本装置和调速轴同转。
2、调整凸轮,使开关接点按要求切换,发出相应的信号。
五:附图1、接线排2、微动开关3、内轮4、外轮5、联接盘6、座板电气接线图座板安装尺寸图。
8.7.2.1 将塔机转至被控制状态,且调整应在空载下进行。
8.7.2.2 拆开上罩壳,检查并拧紧2-M3×55螺钉,同时松开M5螺母,用手逐个压下微动开关WK,确认控制限位的微动开关(WK)是否正确。
8.7.2.3 调整轴4Z,使凸轮4T压下微动开关4WK的触点,使之瞬时换接,然后拧紧M5螺母。
8.7.2.4 将机构运行至另一个控制状态,松开M5螺母,调动调整轴承1Z,使凸轮1T动作,压下微动开关1WK的触点,至使之瞬时换接,然后拧紧M5螺母。
8.7.2.5 机构反复空载数次,验证记忆位置是否准确,确认符合要求后,再装上罩壳。
8.7.2.6机构正常工作,应经常核对记忆位置是变动,以便及时修正。
8.7.3主要技术参数。
8.7.3.1工作环境。
a.环境温度:-20 ~+40℃。
b.相对湿度:不大于90%。
c.海拔高度:不大于2500m。
8.7.3.2 传动比:1:46,1:210,1:274。
8.7.3.3 重复定位精度记忆凸轮的转角误差不大于0.05rad(0.3°)。
8.7.3.4 额定电压:AC125/250V。
8.7.3.5 额定电流6-10A。
8.8 司机室联动操作台。
8.8.1 结构及动作原理。
TC6513-8塔式起重机联动操作台的结构,由左、右操作台和可调座椅等组成。
座椅可以拆装,左、右操纵台内分别有一组传动机构,传动机构下面装有两组触头组,操纵杆上装有零位自锁装置,防止误动作,当握住操纵杆球部时,用手拉起自锁杆后顺着向前推或向后拉,使扇形齿轮带动一触头组上的小齿轮凸轮转轴,使相应的触头关合,操纵杆的移动距离与控制的机构速度有关,操纵杆移动的距离越大,则速度越快,当手离开操纵杆时,回位弹簧立即抱紧,使零位自锁。
机构的运动方向与手柄运动方向见表2表2。

立林v33可视对讲说明书插上电和一排插线就可以使用。
按钮估计分别是选铃声,呼叫主机,监视,开锁,免打扰,挂机监视,开锁,免提按钮leelen门铃设置问题1、进入和退出编程状态:按一下主机背后小孔里的微动开关,“嘟”一声则进入或退出编程状态。
断电重新上电也可退出编程状态。
2 、主机进入编程状态。
连续按“*”键,找到SCUA/SC-A项,查看是否为SC-A,如不是的话按任意数字键切换选择为SC-A。
(SCUA/SC-A: 代表门口主机有无密码开锁功能,出厂默认为SCUA) 以上操作完毕按“*”键结束,正确时会有“嘟”提示音。
若操作中出错,可按“#”清除,再按“*”键重新开始各步骤操作。
设置完毕退出编程状态。
(注意:其他选项参数勿改,否则会造成整个单元混乱,再修改很头疼很麻烦的)3、密码设置,住户密码可设1~6位数字,操作:密码键+“四位分机号”+密码键+“住户旧密码”+密码键+“住户新密码”+密码键。
说明:分机号即你的房间号,不足4位的首位加零,例203室则0203室。
①操作正确主机会有一声长“嘟”音,不正确则“嘟.嘟”音;②“住户旧密码”为住户原先使用的密码,“住户新密码”为住户想要设置的密码。
③若第一次设密码或密码忘记,必须进入编程状态操作,且“住户旧密码”与“住户新密码”相同。
例:第一次设密码(必须在编程状态)密码键+0203密码键+8888+密码键+8888+密码键,此时开锁密码为“8888”更改密码(可以不进入编程状态):密码键+0203+密码键+8888+密码键+1818+密码键,此时开锁密码为“1818”。
你这个是室内门铃显示屏。
第一个是关闭铃声,中间是个看门外的按扭,右边是开门按扭。
目录1 简介2 规范2.1D U A L A C2的技术规范52.2D U A L A C2&H P的技术规范62.3D U A L A C2P O W E R(加强型)的技术规范72.4D U A L A C2&H P P O W E R(加强型)的技术规范82.5 控制单元82.5.1 微动开关82.5.2 加速单元82.5.3 其他模拟控制单元92.5.4 速度反馈92.5.5 转向角传感器102.7 操作特性12 2.8 故障诊断13 2.9 热保护措施13 2.10 常规问题的解决与防范13 2.11 磁化与磁辐射132.12 主接触器与应急开关143 安全与保护144、安装14 4.1 连接电缆14 4.2 接触器15 4.3 熔断器15 4.4“D U A L A C2”与“D U A L A C2”加强型的接线说明15 4.5“D U A L A C2”与“D U A L A C2&H P”加强型的接线说明174.7C A N B U S连接器的结构19 4.7.1单个D U A L A C2控制器19 4.7.2“D U A L A C2”作为C A N B U S网络的终端模块20 4.7.3“D U A L A C2”作为循环模块接入C A N B U S网络20 4.8电源接线图21 4.8.1“DUALAC2”21 4.8.2“D U A L A C2加强型”22 4.8.3“D U A L A C2&H P”23 4.8.4“D U A L A C2&H P加强型”24 4.9机械图254.10“D U A L A C2”与“D U A L A C2加强型”标准接线图29 4.11“D U A L A C2&H P”与“D U A L A C2&H P加强型”标准接线图30 5、利用手持单元的编程及调整31 5.1使用手持单元调整31 5.2手持单元及连接器接线的描述31 5.3标准手持单元菜单的介绍325.3.1“D U A L A C2”与“D U A L A C2加强型”菜单结构325.3.1a 主菜单325.3.1b 从菜单335.3.2“D U A L A C2&H P”与“D U A L A C2&H P加强型”菜单设置345.3.2a 主菜单345.3.2b 从菜单35 5.4 功能设置355.4.1 “DUALAC2”与“DUALAC2加强型”—主控制部分355.4.2 “DUALAC2”与“DUALAC2加强型”—从控制部分375.4.3 “DUA LA C2&HP”与“DU A LAC2&H P加强型”—主控制部分功能385.4.4 “DUA LA C2&HP”与“DU A LAC2&H P加强型”—从控制部分功能38 5.5 参数调节405.5.1“D U A L A C2”—主控制部分405.5.2“D U A L A C2”—从控制部分415.5.3“D U A L A C2&H P”—主控制部分415.5.4“D U A L A C2&H P”—从控制部分42 5.6 可编程的控制器的功能465.6.1 功能设置(参见5.4)465.6.2 参数编程(参见5.5)465.6.3“D U A L A C2&H P”与“D U A L A C2&H P加强型”测试465.6.4“D U A L A C2&H P”与“D U A L A C2&H P加强型”测试475.6.5 储存功能(存储数据)—仅适用于PC 控制475.6.6 复制功能(下载参数用于其他控制)—仅适用于PC手持单元475.6.7 显示最后5次报警信息,连同小时计值,温度一起显示475.6.8 加速器范围整定485.6.9 参见手持单元手册对于功能和参数的详细说明48 5.7A C牵引逆变器设置顺序48 5.8 测试功能描述485.8.1“D U A L A C2”与“D U A L A C2加强型”—主控制部分495.8.2“D U A L A C2”与“D U A L A C2加强型”—从控制部分505.8.3“D U A L A C2&H P”与“D U A L A C2&H P加强型”—主控制部分515.8.4“D U A L A C2&H P”与“D U A L A C2&H P加强型”—从控制部分52 6、其他功能546.1 保存与复制功能54 6.2 报警菜单描述54 6.3 手持单元整定加速器操作过程557、“D U A L A C2”与“D U A L A C2&H P”故障诊断56 7.1 与牵引相关的错误编码56 7.2 手持单元显示的关于牵引相关的报警分析60 7.3 与泵斩波器相关的故障编码647.4 手持单元显示的关于油泵方面的报警分析658、推荐使用部件659、定期维护67= 凡标注此记号的章节是与安全相关的内容签名表出版物编号:版本1 简介ZAPIMOS系列中的DUAL AC2逆变器适合用于3—7KW一对电机控制。
CY型SF6开关液压机构有关说明PSAF组件(包括四组微动开关)1、KP1油泵启停:液压机构内部的油压下降至31.6MPa时,油压开关中的微动开关KP1的接点闭合,电动机启动,带动油泵打压储能;当油压上升至32.6MPa时,微动开关KP1返回,KM失电返回,电机电源被切除。
2、KP2合闸闭锁:闭锁值27.8±0.8Mpa。
表示断路器若原在分闸位置时,液压机构内部的油压下降至此值,合闸闭锁(即不能合闸)。
3、KP3分闸闭锁:闭锁值25.8±0.8Mpa。
表示断路器若原在合闸位置时,液压机构内部的油压下降至此值,分闸闭锁(即不能分闸,不允许分闸)。
4、KP4零压闭锁:(包括:开关失压到零压,油泵电机不打压,在开关于合闸位置情况不能打压。
)备注:1、控制阀、三极阀两边弹簧、钢球为防慢分用;2、供排油阀兰区锥阀应在黄区左侧,弹簧为复位弹簧,在分闸时失去压力收缩;3、工作缸两边的点点为缓冲弹簧;4、防震容器兰区为自动释放阀;5、PSAF下端为手动释放阀;6、辅助储压器作用是维护三极阀压力;7、PSAF氮气维护该组件压力;8、主储压器维护整套设备压力;六氟化硫开关液压机工作原理以图纸为例油泵打压原理:在分闸位置时,红区常高压,兰区为低压,黄区为无压(但不等于无油)。
1、压力低到31.6兆帕时,PSAF组件下部钢珠下移,上部微动接点闭合,(常压时接点打开)启动电机打压,32.6MPA停止。
2、油泵打压,机油泵由左向右移动,循环动作,左兰区活塞阀封闭,机油泵区低压油顶开钢珠阀进入高压区打压。
(进入防震容器)防震容器兰区为高压释放阀,正常时闭锁,油压过高时打开,过高的油进入主油箱,打压后油进入所有红色油区。
3、油泵打压要求每日不超过2次。
合闸过程:1、合闸时,合闸电磁铁启动,向下压开钢珠阀(控制阀中的合闸一级阀,时间80毫秒)高压油过钢珠阀进入控制阀的二级阀,此时,分闸一级阀(钢珠阀)闭锁,下部二级锥阀闭锁。
电缆式浮球液位开关使用说明书
1、组成结构
电缆式浮球液位开关包含四个部分:信号电缆、配重块、浮球及微动开关。
三线制信号电缆线标分别为NC、NO、COM,一般高液位浮球开关选择接常开触点,低液位浮球开关选择接常闭触点;配重块一般安装在浮球上方约200mm处,可以实现浮球的稳定翻转,动作性能最佳;浮球外形酷似球体,内部固定一个微动开关与信号电缆连接,浮球内充以惰性气体,浮球内外有密封要求,防止微动开关锈蚀老化。
2、安装方式
电缆式浮球液位开关一般垂直挂在疏水地坑中,如图1在安装时需注意浮球动作长度l不得大于信号电缆与坑壁的水平距离L,一般要求距离L需大于2倍的动作长度l,防止浮球动作时与坑壁干涉;信号电缆与疏水泵吸水口的水平距离M需大于600mm,避免疏水泵吸水口的吸力影响液位开关动作;浮球液位开关与坑底的距离D需大于疏水泵吸水口与坑底的距离d,防止疏水泵空吸导致电机损坏。
通常每个疏水坑至少会配置3个浮球液位开关:低报开关、高报开关、高高报开关,且这些浮球开关并排分散安装。
目前福清核电RPE系统的所有电缆式浮球液位开关均采用“分散式安装”方式。
3、工作原理
浮球液位开关内部固定高灵敏的微动开关,与信号电缆连接。
当液位
上升到一定高度,由于浮球被固定在配重块上,不再随液位上浮,开始改变浮球的上扬角度,当浮球上扬角度大于30°时,浮球内微动开关触点闭合,触发高报信号,疏水泵开始排水;反之当液位下降到一定高度,浮球上扬角度小于10°时(受回差影响,消报角度一般会小点),浮球内微动开关触点断开,触发低报信号,疏水泵停止排水。
因此,通过设置不同液位高度的浮球液位开关,实现疏水地坑液位的自动控制和报警功能。
SOR液位开关使用说明书SOR液位开关使用说明书SOR液位开关基本原理上升的液面将浮球或弹簧提升式沉筒浮起,带动磁力短管上升至磁场区,吸引并触发电路或气路开关(发出液位到达信号)。
液面下降时,次序相反,电路或气路开关被释开(发出液位下降信号)。
磁力滑块(通过密封套筒)将永久磁铁和开关组件与过程液面隔离,避免磁铁腐蚀和磁力碎屑堆积。
磁力运动传输消除了由机械装置弯曲运动传输带来的疲劳,损坏及过早失效等问题。
磁力运动传输避免了因探杆型传感器引起的表面涂层问题。
在没有工厂允许的情况下,不要改变开关的原件和结构。
SOR液位开关沉筒式结构沉筒悬挂在弹簧平衡联动杆上,液面上升时,沉筒的有效重量因受浮力而减小,弹簧回缩拉起连杆,使磁力短管在密封套筒中上升。
磁力短管的向上运动是在外部永久磁铁产生的磁场内,磁力把外部磁铁吸向磁力短管,牢固地吸附在密封套筒上,此时,微动开关被触发。
液面下降时各次序相反,磁力短管下落至磁场外,复位弹簧将外部磁铁拽离密封套管,微动开关复位。
SOR液位开关浮球式结构浮球与一根机械连杆固定在一起,液面上升至浮球,浮力使连杆上升,磁力短管升入密封套筒中,磁力短管的向上运动是在外部永久磁铁产生的磁场内。
磁力把外部磁铁吸向磁力短管,牢固地吸附在密封套管上,此时,微动开关被触发。
液面下降时各次序相反。
磁力短管下落至磁场外,复位弹簧将外部磁铁拽离密封套筒,微动开关复位。
SOR液位开关引压口联接外浮筒接管应当平直且不受干扰,控制头与外浮筒垂直中心线在3℃内。
注意:顶装式控制头与容器法兰或短管安装成与容器的垂直或水平中心线不超过3℃。
(即:外浮筒式与顶装式均应垂直安装)接管长度应控制在最小,以使开关整体更稳定。
如有需要,应采用接管悬挂或支承装置。
控制机构在液体中动作,接管中很可能堆积沉淀物,应采用“T”形或“+”形管接头,允许定期清洗接管。
排污阀及吹扫阀可用于清洁外浮筒和接管。
正常运行中,所有接管上阀门应完全打开,因为限流可能导致误动作。
微动开关 微动开关概要用语说明使用注意事项故障解决微动开关Q&A■微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖, 其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关 用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa (5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
λ60=0.5×10-6/次表示在可靠度为60%下,故障率为次以下。
(6)接点的形状和种类(7)接点间隔接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。
接点间隔是设计时的目标。
使用时,需要最小接点间隔的话请另外确认后进行选择。
一般接点间隔的标准为0.5mm。
对于相同的开关机构,接点间隔越小MD就越小,灵敏度也越高,机械方面的寿命(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。
微动开关由于电流开关会损耗接点,接点间隔变大,MD加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm的微动开关时,必须保持较小的开关电流,以减小电流开关引起的接点损耗。
接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
关于MD (应差距离)请参见(10)动作特性用语(745页)。
(7)接点间隔接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。
接点间隔是设计时的目标。
使用时,需要最小接点间隔的话请另外确认后进行选择。
一般接点间隔的标准为0.5mm。
对于相同的开关机构,接点间隔越小MD就越小,灵敏度也越高,机械方面的寿命(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。
微动开关由于电流开关会损耗接点,接点间隔变大,MD 加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm 的微动开关时,必须保持较小的开关电流,以减小电流开关引起的接点损耗。
接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
☆:优◎:良○ :普通△:劣(8)速动机构速动机构,可以使可动接点迅速地从一个固定接点移动到其他固定接点,而尽可能不受操作速度的影响。
例如,即使是闸刀开关,如果快速操作手柄,动作就会变快,但是,操作手柄的速度与接点运动速度相关的这种机构不叫速动型,而叫做缓动型。
接点的开关速度越快,接点间产生电弧的持续时间就会越短。
这样,就会导致接点的消耗、损伤减少,并可以维持稳定的特性。
但是,在该开关速度中,除有效减少电弧量的速度界限(经济速度)外,也有机械问题的界限,特别是,闭路时如果开关速度过快,可动接点与固定接点的冲击能量就会变大,冲击形成的跳跃现象(振动或摩擦闭合)会产生电弧,此时会严重损耗接点,有时还会不能打开电路,导致接点熔化。
进行这种快速动作的机构,一般会使用具备死点(从一个状态跳跃性地变化到其他状态时的临界作用点)的弹簧机构。
下图表示将拉力弹簧和压缩弹簧进行组合后,形成微动开关速动机构的示例。
以下就有关双投型(Z)速动机构的动作原理进行说明。
如下图所示,为开关的力的关系。
在未对传动器施加外力的自由位置中,由于受到2个力-F2与F0的影响,压缩弹簧的反作用力F1处于平衡状态。
F0为将可动接点c推到固定接点b的压力。
接着,通过传动器对拉力弹簧的一部分施加力,使拉力弹簧移位,此时,N点的力F1和F2将依次变大,夹角接近180°,不久,仅F1和F2处于平衡状态,即F0=0。
从自由位置到F0=0间存在滑动作用,会使接点向水平方向移动,并进一步弯曲压缩弹簧。
从F0=0的位置,通过进一步施加外力,使拉力弹簧微量移位,就会产生反方向的力-F0,以弯曲压缩弹簧的最大强力将可动接点c从下方向压出,可动接点c 就会穿过空间向对面的固定接点a 移动。
利用这一动作原理,微动开关以开关固有的切换速度(离开速度)切换接点,而与按住拉力弹簧时产生外力的速度无关。
F0=0时的位置称为动作位置,与拉力弹簧的一部分通过死点的位置基本一致。
消除外力进行复位操作时,也是基于相同的原理,而此时弹簧的弯曲反作用力即为复位原动力。
微动开关基于拉力弹簧和压缩弹簧的组合进行动作的原理图(9)接触电阻·接点接触力特性接触电阻根据接点接触力而变化,下图表示了其关系。
接点接触力变大的话接触电阻变得较稳定(变小),相反当接触力变小的话就开始变得不稳定(变大)。
接触电阻·接点接触力特性(10)动作特性的相关用语动作特性的定义分类用语略称单位偏差表示方法定义力动作力(OperatingForce)OF N最大从自由位置运行到动作位置必须加到驱动杆上的力。
回复力(ReleasingForce)RF N最小从总行程位置运行到复位位置必须加到驱动杆上的力总行程所需的力TTF N 从自由位置运行到总行程位置关于偏差的解释例(例)Z-15G-B OF(动作力)2.45~3.43N解释:表示将加在驱动杆上的力从0开始增加到3.43N,无论哪个开关都应动作。
开关行程的设定请参考750页的「①关于操作行程设定」。
(11)力、冲程、接点接触力特性微动开关的动作特性用力、冲程特性来表示。
下图表示这一特性。
即将横轴冲程(传动器的行程)施加到纵轴传动器上,取得此时所施加的力。
微动开关的特点如下:①在动作时和还原时,力急剧变动,同时发出开关的切换音,由此可以判断开关的动作位置(OP) 和复位位置(RP)。
②由于存在响应差的行程(MD),因此,即使操作传动器的操作体产生移动或上下晃动,可动接点中的其中一个固定接点也是稳定的,因此,可动接点适用于机械检测用开关。
③由于接点的切换会快速进行,因此,在电流开关时电弧连接时间较短的小型开关中,可以开关较大的电流。
下图表示冲程和接点接触力的关系。
在自由状态下,随着将传动器逐渐押入,接点接触力将会逐渐减少,而到达OP后,接点接触力将会变为零,可动接点从常闭(NC)向常开(NO)反转,随即产生接触力。
如果再次押入传动器,NO侧的接触力将会增大。
传动器复位时,NO侧变为零,接着就会在NC侧产生接触力。
(12)接点切换时间操作速度和接点切换时间的关系如右图所示。
随着传动器的操作速度逐渐变慢,接点切换时间会逐渐变长。
因此,应用规定的最小操作速度来测定接点切换时间。
下图中的测定电流规定为如下:微小负荷用微动开关的通电电流为1mA,一般用途微动开关的通电电流为100mA。
如下图所示,接点切换时间为不稳定时间、反转时间及振动时间之和,一般微动开关的接点切换时间为5~15msec。
这里,不稳定时间是由接触电阻不稳定引起的,而接触电阻不稳定是由前述接点反转前的接点接触力降低及接点摩擦闭合所导致的。
??速动机构的机械反转会产生反转时间。
可动接点冲击固定接点时的振动会产生振动时间。
不稳定时间和振动时间会使接点发热,引起接点熔化,而在和电子电路连接后,还可能会引起电子电路的误动作。
因此,设计微动开关时,应尽量缩短不稳定时间和振动时间。
(13)接点的摩擦闭合根据速动机构的种类不同,有的微动开关在接点部几乎不发生摩擦闭合(滑动)。
摩擦闭合作用,指可动接点在某一接触力下在固定接点面上滑动的动作。
下图表示可动接点动作时和复位时的摩擦闭合说明图。
摩擦闭合会产生两种效果,即对接点表面的净化作用和因冲击电流等引起接点熔化时的跳闸作用。
(14)端子符号和接触形符号端子符号COM 共通端子NC 常闭端子NO 常开端子(15)端子的种类注. 此外,还有端子连接部为塑封的带导线产品和单触连接器对应型产品。
(16) 接触类型的种类■关于EN61058-1规格的用语·防触电保护等级:表示防触电的等级,有如下4个等级。
Class 0:作为防触电措施只用基本绝缘来保护。
Class Ⅰ:作为防触电措施除了基本绝缘以外还加上地线来保护。
ClassⅡ:作为防触电措施用双重绝缘或加强绝缘来保护,不需要接地。
ClassⅢ:作为防触电措施,由于使用了安全超低电压(50VAC以下,或者70VDC以下)电路,因此不需要采取防触电措施。
·Proof Tracking Index (PTI):指抗漏电指数。
是在供试品中插入2根电极将规定的溶液(氯化铵0.1%)向电极间滴落50滴而不发生短路的最大耐压值,有以下5种等级。
UL黄皮书的CTI值和PTI的关系如下表所示。
?·操作次数:表示规格中规定的耐久试验的开关次数。
各厂家从下表的次数中选择,在开关上用符号表示。
在IEC规格中高频率操作的开关标准为50000次,低频率操作的开关标准为10000次。
?·使用环境温度:开关可使用的温度范围。
表示符号的含义请参考下表。
·焊接端子型1:根据焊接端子的耐热性来区分的一种类型,满足下面的试验条件。
焊接槽使用端子:在+235 ℃的焊接槽中按规定的速度、时间、深度放入焊接端子,端子应没有松动,绝缘距离应无变化。
钎焊烙铁使用端子:在按规定的钎焊烙铁的尖端温度+350℃下,将直径0.8mm的焊锡在端子上溶化2~3秒,端子应没有松动,绝缘距离应无变化。