履带车辆转向分析_程军伟
- 格式:pdf
- 大小:554.96 KB
- 文档页数:6


履带车辆的转向理论一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O 作稳定转向的简图,如图7—12所示.从转向轴线O 到车辆纵向对称平面的距离R ,称为履带式车辆的转向半径.以T O 代表轴线O 在车辆纵向对称平面上的投影,T O 的运动速度v '代表车辆转向时的平均速度。
则车辆的转向角速度Z ω为:图7-12 履带式车辆转向运动简图R v Z '=ω (7-37)转向时,机体上任一点都绕转向轴线O 作回转,其速度为该点到轴线O 的距离和角速度Z ω的乘积.所以慢、快速侧履带的速度1v '和2v '分别为:Z Z Z Z B v B R v B v B R v ωωωω5.0)5.0(5.0)5.0(21+'=+='-'=-=' (7-38)式中:B —履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动.由上可得:B R B R v v 5.05.021+-=''(二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R 作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1) 在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即:ff f F F F 5.021='='(2)在相同的地面条件和负荷情况下,γcos x F 相当于直 线行驶的有效牵引力KP F ,即:图7-13 转向时作用在履带车辆上的外力γcos x KP F F =所以回转行驶的牵引平衡关系为:K KP f K Kx f f K KF F F F F F F F F F =+='+'+'+'='+'212121cos γ (7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为μM ,在负荷xF 作用下总的转向阻力矩为:γμsin x T C F a M M += (7—40)式中:T a —牵引点到轴线21O O 的水平距离。

《履带车辆行动系统动力学仿真分析》一、引言随着科技的发展,履带车辆在军事、工程、农业等多个领域得到了广泛应用。
其行动系统的性能直接关系到车辆的整体运行效率和安全性。
因此,对履带车辆行动系统进行动力学仿真分析,对于优化车辆设计、提高运行性能具有重要意义。
本文将针对履带车辆行动系统进行动力学仿真分析,以期为相关研究提供参考。
二、履带车辆行动系统概述履带车辆行动系统主要由履带、驱动轮、导向轮、张紧装置等组成。
其中,履带是车辆与地面接触的主要部分,驱动轮为车辆提供动力,导向轮则控制车辆的行进方向,张紧装置则保证履带的张紧度。
这些部件的协同作用,使得履带车辆能够在复杂地形中稳定行驶。
三、动力学仿真分析方法动力学仿真分析是通过对履带车辆行动系统的运动过程进行数学建模,利用计算机软件进行模拟分析的方法。
本文采用多体动力学理论,结合履带车辆的实际结构和工作特点,建立动力学模型。
通过输入各种工况下的驱动力和阻力数据,模拟车辆在不同地形和速度下的行驶情况,从而分析行动系统的动力学性能。
四、仿真结果与分析1. 仿真结果通过动力学仿真分析,我们得到了履带车辆在不同工况下的行驶数据,包括速度、加速度、驱动力、阻力等。
同时,我们还观察到了履带与地面接触的应力分布情况,以及各部件的运动状态。
2. 数据分析根据仿真结果,我们可以对履带车辆行动系统的动力学性能进行分析。
首先,通过对不同工况下的驱动力和阻力进行分析,我们可以了解车辆在不同地形和速度下的行驶性能。
其次,通过对履带与地面接触的应力分布进行分析,我们可以了解履带的磨损情况和承受能力。
最后,通过对各部件的运动状态进行分析,我们可以评估行动系统的协调性和稳定性。
五、结论与展望1. 结论通过动力学仿真分析,我们得到了履带车辆行动系统在不同工况下的运行数据和性能评估。
结果表明,行动系统的设计在一定程度上能够满足车辆在各种地形和速度下的行驶需求。
然而,仍存在一些需要改进的地方,如提高履带的耐磨性、优化驱动轮和导向轮的协调性等。

液压与气动2009年第7期统的模糊PI D 控制比传统的PI D 控制有较小的超调量和较快的响应速度。
参考文献:[1] H ong ren L. i H ydrauli c contro l syste m [M].Be iji ng :N ati onalD efence Industry Press , 1990.[2] 贺云波, 等. 电液伺服系统的完整建模及变尺度多调整因子解析模糊控制[J].机床与液压, 2000(5.[3] 李士勇, 模糊控制和智能控制理论与应用[M].哈尔滨:哈尔滨工业大学出版社, 1990.[4] 韦巍. 智能控制技术[M].北京:机械工业出版社, 2007. [5] 李国勇. 智能控制及其M ATLAB 实现[M ].北京:电子工业出版社, 2005.[6] 顾瑞龙. 控制理论及电液控制系统[M ].北京:机械工业出版社, 1984.[7] Corbe t T. , Sepehr iN. , L aw rence , P. D . . Fuzzy con tro l o f ac l ass o f hydrauli ca lly actuated i ndustr i a l robo ts[J].IEEET ransac ti ons on Control Syste m s T echno logy 1996, 4(4:419-429.履带车辆差速转向机构转向过程动态特性的试验研究荆崇波, 魏超, 刘丁华Experm i ental I nvesti gati on on Steeri ng Characteristic of Trac ked V ehicle w it h Hydrau lic Steeri ng M echanis mJING Cong bo , W E I Chao , LIU D i n g hua(北京理工大学, 北京 100081摘要:阐述了履带车辆转向过程的转向特性以及液压无级差速转向机构的工作原理, 提出了用液压次级动态仿真试验台模拟履带车辆转向过程的试验方案, 在此基础上, 完成了液压无级转向机构的转向性能试验。
2020年第6期农机使用与维修111某型履带式车辆转向不灵故障分析与排除杨杰敏,刘重发,张郑,张涛(陆军工程大学军械士官学校,武汉430075)摘要:以某型履带式车辆转向不灵故障现象为例,分析故障原因并排除了故障,提出了故障排除的方法技巧。
关键词:履带式车辆;转向不灵;故障原因;排除中图分类号:U472文献标识码:A doi:10.14031/ki.njwx.2020.06.088行星转向机是某型履带式车辆的重要组成部件之一,行星转向机主要使某些履带车辆转向、制动和停车。
行星转向机由行星传动器、闭锁离合器和制动器组成,行星转向机性能的好坏直接影响车辆的转向性能。
某型履带式车辆在训练中,驾驶员将操纵杆拉至第一位置时,车辆没有明显转向而迫使车辆停车。
本文通过对该故障进行了全面的分析,结合诊断的实际经验与相应的辅助检查,给 出了故障的检查和排除方法。
1故障原因分析车辆行驶中导致无分离转向和第一位置转向突然失灵的原因主要有以下几点:(1)分离拉杆脱落或折断。
分离拉杆固定螺帽的开口销忘记安装或在长途行车中共振比较大导致螺帽掉落后分离拉杆脱落或折断,驾驶员拉操纵杆时,突然没有分离转向或第一位置无转向。
(2)分离拉杆自由行程不正确。
安装调整不当或某型履带式车辆长时间使用会造成行星转向机弹子槽磨损,使分离拉杆自由行程不正确。
(3)行星转向机结合不可靠或分离不彻底。
行星转向机内外齿摩擦片变形、翘曲、有油、弹簧弹力下降等,长期磨损会造成摩擦片总厚度达不到标准,进而导致行星转向机结合不可靠或分离不彻底。
(4)小制动带与制动鼓之间间隙过大或有油。
由于各密封件磨损导致漏油、甩油后,油渍存于底盘内行驶中颠簸进入制动带与制动鼓之间,造成制动失效或打滑使某型履带式车辆不能转向,制动带是磨损件,转向越多磨损越严重,特别是间隙过大时制动失效造成制动鼓的磨损加快使某型履带式车辆不能转向。
(5)摩擦片总厚度达不到标准、翘曲、有油。
由于各密封件磨损导致漏油、甩油后,进入摩擦片使摩擦片打滑或烧结翘曲。



《履带车辆行动系统动力学仿真分析》一、引言随着计算机技术的飞速发展,动力学仿真在各种工程领域中扮演着越来越重要的角色。
特别是在履带车辆行动系统的设计与优化中,动力学仿真分析成为了不可或缺的工具。
本文旨在通过动力学仿真分析,深入探讨履带车辆行动系统的性能特点及优化方向。
二、履带车辆行动系统概述履带车辆行动系统是一种通过履带与地面接触并产生推进力的移动系统。
其核心组成部分包括履带、驱动系统、悬挂系统等。
这种行动系统因其良好的越野性能和较高的承载能力,在军事和民用领域均有广泛应用。
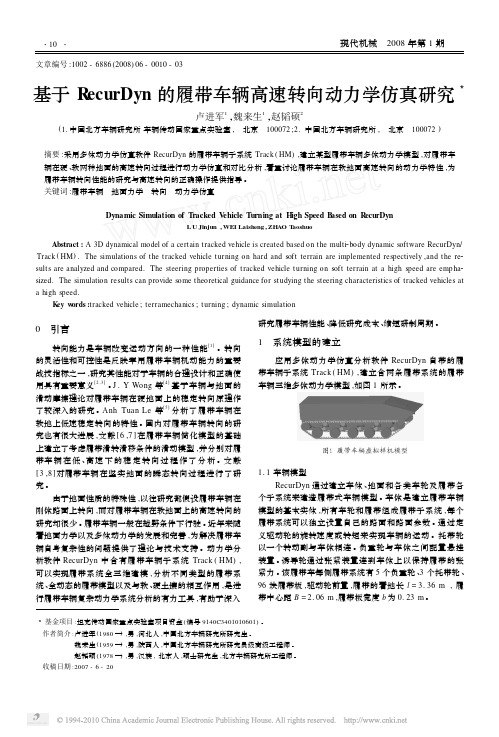
三、动力学仿真模型建立为了对履带车辆行动系统进行动力学仿真分析,首先需要建立相应的仿真模型。
模型应包括车辆的质量、惯量、履带与地面的接触力等关键参数。
同时,还需要考虑车辆在不同地形、不同速度下的运动状态,以及驱动系统和悬挂系统的动态响应。
在建模过程中,应采用多体动力学理论,将车辆各部分视为相互连接的刚体或弹性体,通过力学方程描述其运动状态。
同时,还需要考虑地形的复杂性,如坡度、凹凸不平的路面等对车辆运动的影响。
四、仿真结果分析通过对建立的模型进行仿真分析,可以得到车辆在不同条件下的运动状态及性能参数。
这些参数包括车辆的行进速度、加速度、转向半径、履带张力等。
通过对这些参数的分析,可以得出以下结论:1. 履带车辆的行进速度受地形、驱动力及悬挂系统的影响较大。
在平坦的路面上,车辆的行进速度较高;而在崎岖不平的地形上,车辆的行进速度会受到较大影响。
2. 悬挂系统的设计对车辆的越野性能有显著影响。
合理的悬挂系统设计可以减小车辆在行驶过程中的颠簸程度,提高乘坐舒适性及行驶稳定性。
3. 驱动力的大小直接影响车辆的加速性能和最大行进速度。
在坡度较大的地形上,驱动力的大小对车辆的爬坡能力具有决定性影响。
4. 履带张力是影响履带车辆行驶性能的关键因素之一。
适当的履带张力可以保证履带与地面的良好接触,提高车辆的牵引力和行进稳定性。
五、优化建议及展望根据仿真分析结果,为进一步提高履带车辆行动系统的性能,提出以下优化建议:1. 优化驱动力分配策略,以提高车辆在不同地形条件下的适应能力。

某型履带式车辆转向不灵故障分析与排除【摘要】本文主要围绕履带式车辆转向不灵的故障展开分析与排除。
在介绍了履带式车辆转向不灵故障的重要性。
在依次介绍了该故障的表现、可能的原因、排除方法、实例分析和预防措施。
通过详细分析和实例分析,读者可以更好地理解履带式车辆转向不灵故障的解决方法。
在结论部分总结了本文的主要内容,强调了及时处理和预防履带式车辆转向不灵故障的重要性。
通过本文的阅读,读者可以更好地了解和解决履带式车辆转向不灵故障,提高车辆的使用效率和安全性。
【关键词】履带式车辆、转向不灵、故障分析、排除方法、实例分析、预防措施、结论1. 引言1.1 引言履带式车辆在现代军事和工程领域扮演着重要的角色,它们具有优异的越野性能和承载能力。
偶尔会出现转向不灵的故障,给操作和工程效率带来一定影响。
本文将针对某型履带式车辆转向不灵故障进行分析与排除,以帮助读者更好地了解和解决这一问题。
在日常使用过程中,司机可能会遇到转向不灵的情况,表现为操作杆无法正常控制车辆转向,甚至轮子出现卡滞现象。
这种故障不仅影响了车辆的操控性,还可能导致不良的工作效果和安全隐患。
及时发现并解决转向不灵故障至关重要。
可能的原因包括液压系统故障、转向机构问题、电子控制系统故障等。
针对这些可能原因,我们可以采取相应的排除方法,如检查液压油路是否有漏油、清洗转向机构、更新软件等。
通过实例分析,可以更好地理解转向不灵故障的具体表现和解决方案。
为了预防转向不灵故障的发生,我们还可以制定一些预防措施,比如定期检查维护车辆、加强操作人员的技术培训等。
通过这些措施,可以有效降低转向不灵故障的发生率,提高履带式车辆的可靠性和使用效率。
某型履带式车辆转向不灵故障是一个比较常见的问题,但只要我们能够及时发现并解决,就能够有效提升车辆的工作效率和安全性。
希望本文的内容能够为读者提供一些帮助和启发,使他们能够更好地应对类似问题。
2. 正文2.1 故障现象履带式车辆转向不灵是一种常见的故障现象,可能会给车辆的正常运行造成严重影响。



军用履带车辆转向机构发展综述吴宗文,谭兵(成都军区兵种训练基地装备部,四川崇州6112371引言高速履带车辆直驶时因地面条件的复杂多变需不断地小角度修正方向,转向时为防止发动机熄火一般又需实施多次大角度分段转向。
这些转向操作显著影响了履带车辆平均运动速度的提高。
传动技术的发展使得履带车辆最大速度超过70km/h ,从而较大幅度地提高了车辆平均行驶速度,但高速转向容易发生失控而导致严重后果。
此外,采用综合传动装置的新型军用履带车辆能够实现无级转向及小半径转向,这将为车辆的驾驶操作、使用维修、后勤保障、结构改进等方面带来新变化。
因此,总结履带车辆转向机构的结构特点及发展规律,分析履带车辆转向过程的动态特性,探索提高履带车辆机动性尤其是转向机动性的途径十分必要。
履带车辆转向原理不同于轮式车辆,它需要专门的转向机构改变两侧履带卷绕速度大小或方向使车辆转向。
履带车辆应用的转向机构依据功率流向可分为单功率流和双功率流传动。
2单功率流传动2.1差速器差速器式转向机构其类别从运动学上划分一般属于单流差速式,其机构简图如图1所示。
差速式转向机构的基本原理是转向时一侧履带降低的速度等于另一侧履带提高的速度,车辆几何中心的平均速度不变。
单差速器转向机构主要应用到二战前大量生产的Carden Loyd 超轻型坦克上。
但由于该型车辆直线行驶不稳定和转向灵活性差等原因,很早就被淘汰了。
为增大转向半径而改进的锥齿轮和直齿圆柱齿轮的双重差速器在国外早期的轻型履带车辆上广泛采用,如HS30、霍基斯、法国的RenaultNC 轻型坦克及美国M113步兵战车等。
2.2转向离合器和行星转向机在变速机构后直接串联上某种转向机构,通过操纵一侧转向元件使该侧履带速度降低,另一侧保持直线行驶时速度不变,形成独立式转向机构。
该类转向机构的典型代表有转向离合器、行星转向机等。
转向离合器转向机构通过制动带控制离合器的制动或滑磨以降低一侧履带的卷绕速度实现转向。

某型履带式车辆转向不灵故障分析与排除1. 引言1.1 故障现象描述履带式车辆转向不灵故障的故障现象主要表现为车辆无法按照驾驶员的指令正常转向或转向灵活性受到限制。
具体表现包括转向过程中出现卡滞、转向力过大或转向方向不稳定等情况。
这可能给操作者带来安全隐患,尤其在行驶中需要频繁转向或进行紧急转向时更为明显。
造成履带式车辆转向不灵的可能原因有多种,包括转向系统内部零部件磨损、液压系统油液泄漏或压力不足、转向传动系统齿轮损坏或失效、转向控制单元故障或程序错误、以及其他可能影响转向效果的因素。
解决履带式车辆转向不灵故障具有重要意义,不仅可以恢复车辆正常的转向功能,确保行驶安全,还可以提高工作效率和使用寿命,降低维修成本。
及时发现并排除转向不灵故障是维护履带式车辆正常运行的重要任务。
1.2 故障可能原因1. 液压系统故障:履带式车辆的转向系统通常由液压系统驱动,如果液压泵、液压缸或液压管路出现故障,会导致转向不灵活。
可能的原因包括液压油不足、液压泄漏或液压泵损坏等。
2. 转向传动系统问题:转向传动系统包括转向轴、万向节、转向齿轮等部件,如果其中任何一处出现故障或磨损,都会导致转向不灵活或转向力度过大。
3. 转向控制单元故障:履带式车辆通常会配备电子或液压控制的转向系统,如果控制单元出现故障,会导致无法准确控制转向角度或转向速度。
4. 转向器件刹车问题:履带式车辆的转向通常需要通过刹车来实现,如果转向刹车部件存在问题,如制动盘磨损、制动油不足等,会影响转向的灵活性。
5. 操控操作失误:有时转向不灵活的原因可能来自于操控操作不当,比如长期使用导致操控杆或转向盘的磨损,或者操作员未按照正确的操作步骤来操作转向系统。
1.3 故障解决意义故障解决意义非常重要,它直接影响到履带式车辆的安全性和可靠性。
及时有效地解决转向不灵的故障可以避免发生更严重的事故,保障车辆和操作人员的安全。
在作业过程中,转向不灵会影响车辆的操控性,导致操作困难,影响工作效率,甚至导致任务无法完成。