月球探测器软着陆机构展开动力学仿真分析
- 格式:pdf
- 大小:535.98 KB
- 文档页数:7
第30卷第5期2009年9月宇 航 学 报Journal o fA stronauticsV o.l 30Septe mberN o .52009月球着陆器软着陆机构着陆稳定性仿真分析朱 汪,杨建中(中国空间技术研究院总体部,北京100094)摘 要:介绍了软着陆机构仿真模型,提出了着陆稳定性判据和稳定性边界的离散化搜寻策略,并以实际算例给出了由着陆器着陆瞬时的竖直速度、水平速度、偏航角和月面倾角等主要影响因素确定的着陆稳定性边界。
分析结果表明:对称着陆比非对称着陆更稳定;横向速度较大时支柱联接点容易发生强度破坏;当着陆面存在坡度时,横向速度沿下坡方向相对于沿上坡方向而言,着陆器更容易翻倒。
关键词:着陆稳定性;着陆冲击;软着陆机构;月球着陆器中图分类号:V 47;TB36 文献标识码:A 文章编号:1000-1328(2009)05-1792-05DO I :10.3873/.j issn .1000-1328.2009.05.008收稿日期:2008-11-27; 修回日期:2009-01-100 引言成功着陆是任何着陆探测任务的先决条件。
月球着陆器进入下降轨道后,先由反推发动机减速,同时通过姿态控制系统调整姿态,到达一定高度后关闭发动机自由下落。
月球探测器的着陆质量从数百千克到数千千克,着陆瞬时速度从几米每秒到几十米每秒。
对于采用软着陆机构进行缓冲的着陆器而言,主/辅缓冲器是吸收并耗散着陆冲击能量的核心组件。
月球着陆器的着陆稳定性是指在着陆过程中,通过软着陆机构的主/辅缓冲器吸收冲击能量,保证着陆器不翻倒的可靠性。
着陆稳定性分析不仅要明确各个影响因素,而且由于着陆器机动性能的局限性和月面地理环境的复杂性,分析过程中必须考虑各影响因素的具体参数在较宽范围内变化时着陆器的响应情况,保证着陆器的稳定着陆。
着陆稳定性的影响因素包括着陆器相关参数、月壤力学特性及月貌分布、发动机关机时延特性及尾喷管撞击月面和燃料储箱的晃液动力学效应等[1]。
航空航天技术中的结构动力学分析与仿真航空航天技术的发展离不开结构动力学分析与仿真。
在航空航天领域,结构动力学分析与仿真是评估和改进载荷、振动与静态应力以及结构疲劳寿命等关键参数的重要手段。
本文将讨论航空航天技术中的结构动力学分析与仿真的意义、方法以及应用。
一、结构动力学分析的意义结构动力学分析是通过模拟载荷情况下结构的振动和应力响应,来评估结构的可靠性和安全性。
在航空航天工程中,结构动力学分析有以下几个重要意义:1. 评估结构可靠性:结构动力学分析能够通过模拟不同的载荷情况,分析结构的振动和应力响应,从而评估结构的可靠性和安全性,为设计和改进结构提供依据。
2. 优化结构设计:结构动力学分析可以帮助工程师发现结构中的问题和瓶颈,从而优化结构的设计。
通过分析振动模态以及应力分布等参数,可以针对性地提出结构改进的方案,提高结构的性能和可靠性。
3. 降低结构疲劳寿命:结构动力学分析可以通过模拟结构的振动和应力响应,评估结构的疲劳寿命。
通过合理设计和调整结构的刚度和减振装置,可以降低结构的疲劳损伤,延长结构的使用寿命。
二、结构动力学分析的方法结构动力学分析主要涉及模态分析、应力分析和疲劳寿命评估等方法。
下面分别介绍这些方法:1. 模态分析:模态分析是分析结构的振动特性和模态形态的方法。
通过利用有限元分析软件,可以计算和分析出结构中的振动特征模态,包括自由振动模态和强迫振动响应模态。
模态分析结果可以帮助确定结构的固有频率、振动模态和模态质量等信息。
2. 应力分析:应力分析是研究结构在不同载荷下的应力分布和应力集中的方法。
通过建立结构的有限元模型,在给定的载荷条件下,可以计算结构中各点的应力响应。
应力分析可以帮助发现结构中的应力集中区域和高应力区域,从而进行优化设计和改进。
3. 疲劳寿命评估:疲劳寿命评估是通过模拟结构在不同工况下的应力响应,计算并评估结构的疲劳寿命。
疲劳寿命评估是航空航天技术中非常重要的一部分,可以帮助确定结构的使用寿命和维修周期,保证结构的可靠性和安全性。
月球软着陆控制系统综合仿真及分析(课程设计)在月球探测带来巨大利益的驱使下,世界各国纷纷出台了自己的探月计划,再一次掀起了新一轮探月高潮。
在月球上着陆分为两种,一种称为硬着陆,顾名思义,就是探测器在接近月球时不利用制动发动机减速而直接撞击月球。
另一种称为软着陆,这种着陆方式要求探测器在距月面一定高度时开启制动系统,把探测器的速度抵消至零,然后利用小推力发动机把探测器对月速度控制在很小的范围内,从而使其在着陆时的速度具有几米每秒的数量级。
显然,对于科学研究,对探测器实施月球软着陆的科学价值要大于硬着陆。
1月球软着陆过程分析目前月球软着陆方式主要有以下两种方式:第一种就是直接着陆的方式。
探测器沿着击中轨道飞向月球,然后在适当的月面高度实施制动减速,最终使探测器软着陆于月球表面。
采用该方案时,探测器需要在距离目标点很远时就选定着陆点,并进行轨道修正。
不难发现,该方法所选的着陆点只限于月球表面上接近轨道能够击中的区域,所以能够选择的月面着陆点的区域是相当有限的。
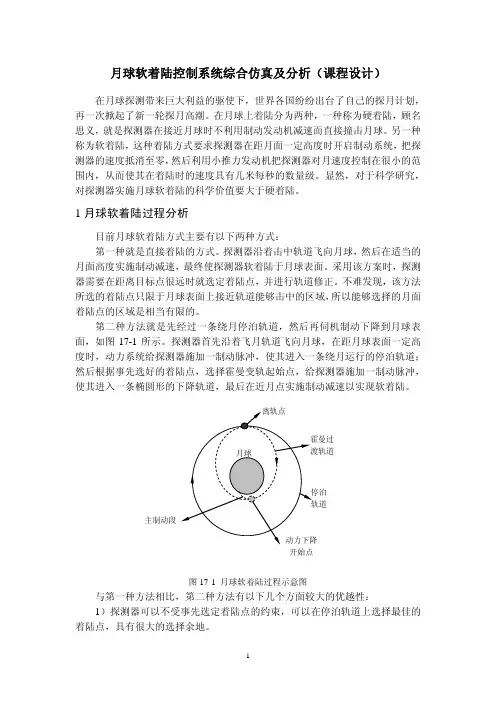
第二种方法就是先经过一条绕月停泊轨道,然后再伺机制动下降到月球表面,如图17-1所示。
探测器首先沿着飞月轨道飞向月球,在距月球表面一定高度时,动力系统给探测器施加一制动脉冲,使其进入一条绕月运行的停泊轨道;然后根据事先选好的着陆点,选择霍曼变轨起始点,给探测器施加一制动脉冲,使其进入一条椭圆形的下降轨道,最后在近月点实施制动减速以实现软着陆。
主制动段开始点图17-1 月球软着陆过程示意图与第一种方法相比,第二种方法有以下几个方面较大的优越性:1)探测器可以不受事先选定着陆点的约束,可以在停泊轨道上选择最佳的着陆点,具有很大的选择余地。
2)在停泊轨道上,可以对探测器上的设备进行全面的检查、修正,为下一步的霍曼变轨段做好准备。
如果是载人登月,停泊轨道还可以给航天员以充足的准备时间,做好心理等方面的准备。
3)由于可以把轨道舱停留在停泊轨道上,而只控制着陆舱(包括下降发动机、推进剂、GNC 系统和在月面上作业的有效载荷等)降到月球表面,故可以减少探测器着陆部分的质量,从而减少着陆过程推进剂的消耗。
月球探测器软着陆动力学分析综述在月球探测器的研制过程中,软着陆动力学分析是其关键环节之一,它是通过探测器的着陆冲击过程进行模拟,来预测探测器的动力学特性。
月球探测器软着陆动力学分析的内容主要有以下两个方面:1)着陆稳定性分析。
确定不同着陆条件下探测器着陆稳定性的包络边界,保证探测器在一定姿态范围内不翻到、不陷落,并为探测器系统的工作提供牢固的支撑。
它是在系统层次上进行的动力学分析,主要关心整体结构的全局动力学响应。
2)动力学响应分析。
预测不同着陆条件下探测器上有效载荷处的加速度响应,进而确定其最大期望力学环境,为探测器结构设计和环境模拟试验提供依据,保证搭载人员和设备的安全。
它是对探测器局部响应进行的动力学分析,主要关心细节处的动力学响应。
第1章国外研究历史自20世纪60年代以来,由于“阿波罗”计划的需求推动,美国宇航局(NationalAeronautics and Space Administratior,NASA 针对月球探测器的软着陆动力学分析展开了一系列研究工作⑴。
在此期间,NASA的载人飞船中心(Manned Spacecraft Center,MSC。
1973年更名为约翰逊航天中心:Johnson Space Cente,JSC、兰利研究中心(Lan gley Research Cen ter,LRQ、马歇尔太空飞行中心(George C. Marshall Space Flight Center,MSFC,及其合同商------ 班迪克斯公司(Bendix Corporation)与格鲁曼飞机工程公司(Grumman Aircraft Engineering Corporation, GAEC分别建立了各自的探测器简化模型并针对各自的模型提出了相应的软着陆动力学分析方法。
1963年,MSFC的LavendeF将月球探测器简化为二维刚体模型,并提出了一种考虑了缓冲器的刚度、阻尼和压溃特性的软着陆动力学仿真算法。
月球软着陆自主导航、制导与控制问题研究共3篇月球软着陆自主导航、制导与控制问题研究1月球软着陆自主导航、制导与控制问题研究随着人类探索宇宙的步伐不断加快,月球作为我们最近的天体之一,成为了人类深入了解太阳系和宇宙的一个窗口。
而在月球科学考察中,如何实现月球软着陆成为了一个重要问题。
针对月球自主导航、制导与控制问题的研究,可以为未来月球探测任务提供重要的技术支撑。
月球的自主导航主要是针对月球探测器在起飞、降落以及控制等方面进行研究。
在月球起飞时,需要掌握发动机的运行情况以及控制即将起飞的探测器的角度和速度。
因此,对于发动机性能的准确掌握以及准确定位是关键。
在降落阶段,导航控制系统需要根据探测器与月球地面的实时距离和速度来进行自主导航和控制。
同时,还需要考虑地形高差的变化、喷气推力方向的变化、气动阻力的变化等多种因素,并进行反馈控制来保证安全着陆。
针对月球的自主制导问题,需要从月球表面环境的特点出发进行考虑。
由于月球环境对探测器的影响,比如重力、气压、温度等因素与地球截然不同,因此需要对控制系统有更高的要求。
在控制系统里,要把握好制导精度和控制周期两个指标。
对于制导精度,可通过制导传感器实时获取距离和角度等相关信息,来快速、准确地反馈给控制器,从而改变探测器的飞行轨迹和朝向。
同时,必须使用快速响应的推进器,确保探测器的运动能够及时地跟随制导信号。
在控制周期上,需要尽量减少探测器与月球地面失去联系的时间,确保各个控制环节的协调配合,使得控制系统能够对探测器进行有效的导航和控制。
月球软着陆的控制是整个探测任务中最关键的一个环节。
由于月球表面环境影响较大,如月球表面的粗糙度、地形的高差等,软着陆的难度比较大。
需要在控制系统中通过对摩擦力抵消和推力信号控制等动力学控制策略的运用,实现探测器从空中到柔软着陆的顺畅过渡。
此外,还需要考虑到增量控制、反馈控制以及模型预测控制等多种质量控制策略,以帮助探测器实现更稳定、可靠的控制。
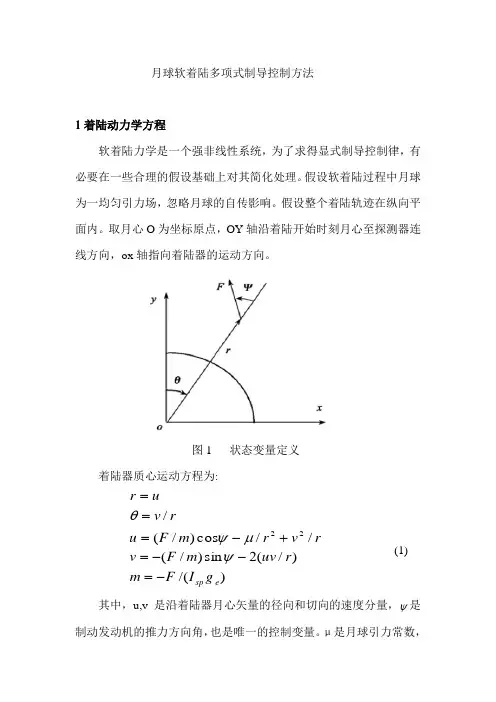
月球软着陆多项式制导控制方法1着陆动力学方程软着陆力学是一个强非线性系统,为了求得显式制导控制律,有必要在一些合理的假设基础上对其简化处理。
假设软着陆过程中月球为一均匀引力场,忽略月球的自传影响。
假设整个着陆轨迹在纵向平面内。
取月心O 为坐标原点,OY 轴沿着陆开始时刻月心至探测器连线方向,ox 轴指向着陆器的运动方向。
图1 状态变量定义着陆器质心运动方程为:)/()/(2sin )/(//cos )/(/22e sp g I F m r uv m F v r v r m F u rv ur -=--=+-===ψμψθ (1)其中,u,v 是沿着陆器月心矢量的径向和切向的速度分量,ψ是制动发动机的推力方向角,也是唯一的控制变量。
μ是月球引力常数,F 为制动推力器的常值推力大小,SP I 为发动机的比推力,e g 为地表重力加速度常数。
2.最优轨迹利用最优控制理论,可以得到以下最优下降轨迹的必要条件。
定义哈密尔顿函数:)(())/()/(2sin )/(//cos )/(/22e sp m v u r g I F r uv m F r v r m F r v u H λψλμψλλλθ-+-+-++= 其中,(2)中i λ 是伴随状态变量。
最优的推力方向角满足: ⎪⎪⎭⎫⎝⎛-=⇒=∂∂-uv Hλλψψ1tan 0 (3) 其中,u v λλ,,满足下面的微分方程:vH uH v u ∂∂-=∂∂-=λλ (4)一般来说方程(4)很难得到解析式。
上述最优着陆初值和终值已知,所以最优控制量——推力方向角可以通过求解两点边值问题得到,由于求解两点边值问题涉及到很大的计算量,星载计算机在很短的控制周期内很难进行求解。
因此有必要发张新的计算量小,适合星载计算机的制导控制律。
3.多项式制导律在“阿波罗”任务中,水平方向的着陆轨迹被规划为四次多项式,进而通过求导得到了经典的软着陆月球控制律。
本文参考“阿波罗”飞船软着陆月球的制导控制方法,以消耗最优为出发点,根据开环最优制导重新设计月球软着陆的多样式制导控制律。
月球探测器软着陆机构展开动力学仿真分析孙毅;胡亚冰;刘荣强;邓宗全【期刊名称】《宇航学报》【年(卷),期】2010(031)002【摘要】可展开的软着陆机构是月球探测器的重要组成部分.以带间隙的多体系统动力学理论为基础,针对一型采用四支撑悬臂式软着陆机构的月球探测器在ADAMS中建立了虚拟样机模型,分别就主着陆腿系统结构柔性,主着陆腿与基体连接间隙,展开驱动力及探测器自旋等因素对软着陆机构展开过程的影响进行了仿真分析.结果表明,在机构展开锁定瞬间由于结构柔性会产生难以衰减的振动,而间隙在一定程度上有利于该振动衰减.展开驱动力越大,展开越快,锁定激振振幅越大,但由展开进入稳定状态所需总时间可更短.探测器自旋则有助于机构的展开,但自旋速度较高时对结构振动有明显影响.该结果可为软着陆机构展开方案的设计提供帮助.【总页数】7页(P335-341)【作者】孙毅;胡亚冰;刘荣强;邓宗全【作者单位】哈尔滨工业大学航天学院,哈尔滨,150001;哈尔滨工业大学航天学院,哈尔滨,150001;哈尔滨工业大学机电工程学院,哈尔滨,150001;哈尔滨工业大学机电工程学院,哈尔滨,150001【正文语种】中文【中图分类】V476.3;TP391.9【相关文献】1.月球探测器软着陆动力学及影响因素分析 [J], 董威利;刘莉;周思达;陈树霖;张南富2.月球探测器软着陆动力学仿真 [J], 蒋万松;黄伟;沈祖炜;王海涛3.月球探测器软着陆机构展开过程的运动学分析 [J], 黄传平;刘志全4.月球探测器软着陆机构着陆腿模型与仿真分析 [J], 朱汪;杨建中5.基于瞬态动力学方法的月球探测器软着陆腿着陆冲击性能分析 [J], 万峻麟;聂宏;李立春;陈金宝;曾福明因版权原因,仅展示原文概要,查看原文内容请购买。
月球着陆器软着陆冲击仿真林轻;聂宏;陈金宝;万峻麟;李立春【摘要】为提高分析月球着陆器软着陆有效载荷着陆冲击响应的准确性,提出一种基于瞬态动力学的着陆器有效载荷软着陆冲击响应分析方法.根据着陆器全机结构柔性和月壤柔性对有效载荷着陆冲击响应的影响,参照某型着陆器,于MSC.PATRAN环境中建立着陆器全机柔性体模型及月壤柔性体模型,运用瞬态动力学仿真软件MSC.DYTRAN对着陆器软着陆有效载荷着陆冲击响应特性进行了仿真研究.仿真结果与试验结果具有一定的一致性.研究结果表明:使用该方法分析着陆器软着陆有效载荷的着陆冲击响应是准确有效的,能够比较逼真地模拟月球着陆器实际着陆工况.%To improve the analysis accuracy of soft landing impact response for lunar lander, a method based on nonlinear transient dynamic analysis was presented. In view of the influence of the flexibility of lunar lander and regolith on impact response of payloads, the flexible models for the lander and regolith were built by MSC. PATRAN based on a certain lunar lander. Then, the transient dynamics software MSC. DYTRAN was used to simulate the payloads impact response of soft landing. It shows that the simulation is consistent with experimental results. The proposed method analyzes the landing impact response for several payloads accurately and simulates the actual landing conditions of lunar lander realistically.【期刊名称】《中国空间科学技术》【年(卷),期】2011(031)005【总页数】7页(P70-75,83)【关键词】柔性体;瞬态动力学;软着陆;仿真;月球着陆器【作者】林轻;聂宏;陈金宝;万峻麟;李立春【作者单位】南京航空航天大学,南京210016;南京航空航天大学,南京210016;南京航空航天大学,南京210016;南京航空航天大学,南京210016;南京航空航天大学,南京210016【正文语种】中文1 引言软着陆缓冲机构是月球探测器着陆过程中重要的吸能装置,其主要功能是缓冲探测器在月面着陆时的冲击载荷,保证结构和有效载荷的安全,防止探测器倾倒并为其在月面工作提供可靠的支持。