10轨道的高低
- 格式:ppt
- 大小:1.80 MB
- 文档页数:7
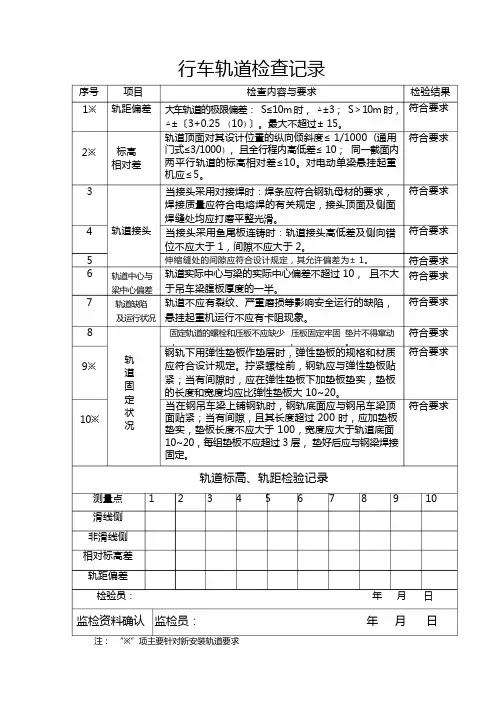
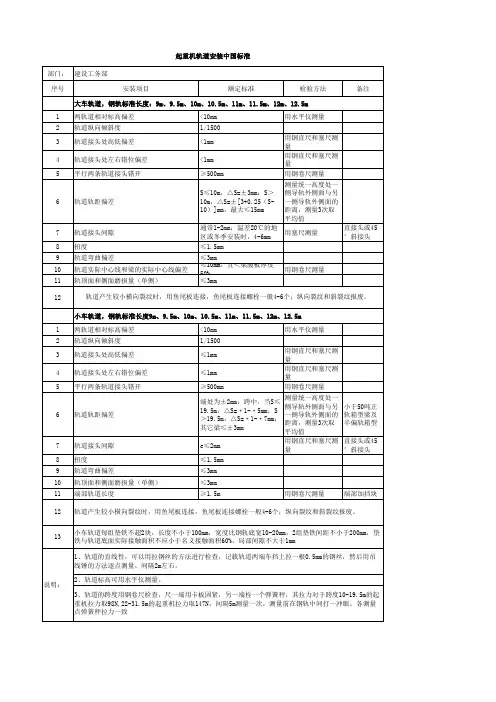
行车轨道检查记录序号 1※2※项目 轨距偏差标高 相对差检查内容与要求 大车轨道的极限偏差: S≤10m 时, △±3; S >10m 时, △±〔3+0.25 (10)〕。
最大不超过± 15。
轨道顶面对其设计位置的纵向倾斜度≤ 1/1000 (通用 门式≤3/1000), 且全行程内高低差≤ 10; 同一截面内 两平行轨道的标高相对差≤10。
对电动单梁悬挂起重 机应≤5。
检验结果符合要求符合要求345 6789※10※轨道接头轨道中心与 梁中心偏差 轨道缺陷及运行状况 当接头采用对接焊时:焊条应符合钢轨母材的要求, 焊接质量应符合电熔焊的有关规定,接头顶面及侧面 焊缝处均应打磨平整光滑。
当接头采用鱼尾板连铸时:轨道接头高低差及侧向错 位不应大于 1,间隙不应大于 2。
伸缩缝处的间隙应符合设计规定,其允许偏差为± 1。
轨道实际中心与梁的实际中心偏差不超过 10, 且不大 于吊车梁腹板厚度的一半。
轨道不应有裂纹、严重磨损等影响安全运行的缺陷, 悬挂起重机运行不应有卡阻现象。
固定轨道的螺栓和压板不应缺少 压板固定牢固 垫片不得窜动 , , 。
钢轨下用弹性垫板作垫层时,弹性垫板的规格和材质 应符合设计规定。
拧紧螺栓前,钢轨应与弹性垫板贴 紧;当有间隙时,应在弹性垫板下加垫板垫实,垫板 的长度和宽度均应比弹性垫板大 10~20。
当在钢吊车梁上铺钢轨时,钢轨底面应与钢吊车梁顶 面贴紧;当有间隙,且其长度超过 200 时,应加垫板 垫实,垫板长度不应大于 100,宽度应大于轨道底面 10~20,每组垫板不应超过 3 层, 垫好后应与钢梁焊接 固定。
符合要求符合要求符合要求符合要求 符合要求符合要求 符合要求符合要求轨道标高、轨距检验记录测量点 1 2 3 4 5 6 7 8 9 10 滑线侧 非滑线侧 相对标高差 轨距偏差检验员: 年 月 日监检资料确认 监检员: 年 月 日注: “※”项主要针对新安装轨道要求轨 道 固 定 状 况。
ENE轨道线反向指标ENE(轨道线)1、ENE指标简介ENE轨道线技术指标从台湾引入,该指标的原参数是(25,6,6),该通道是符合台湾加权指数±7%的,但中国的规则是上下10%,所以参数变成(10,11,9)含义是以中轨10为准向上10%是11,向下10%是9的意思。
ENE轨道线在运用于中国股市的分析过程中,在股市处于熊市以及震荡市时,具有较强的操作指导作用,而我国股市又是熊长牛短。
一般情况下,投资者由于在熊市过程中很难判断高低点而缺乏交易性机会。
但利用ENE指标却能在熊市里每年都有相当稳定的获利,因为每次股票跌至下轨后都会有10%左右的获利,并且每年基本上每个个股都会到达下轨4-5次。
如果每年只做一只个股,抓住每次该个股打下轨的机会,年化收益率也有40-50%的利润。
因此,学好ENE指标并能活学活用,在熊市中也能获取较为丰厚的利润。
2、ENE指标设置目前我们常用的股票行情软件里,笔者常用东方财富设置ENE指标。
第一步,打开东方财富行情软件,选择个股或指数;第二步,键盘输入ENE(右下角出现ENE 轨道线指标),并进行选择;第三步,选择轨道线右单击,出现菜单,选择“设置技术指标(ENE)参数”,参数设置为(10,11,9),原参数为(25,6,6)3、ENE指标在下跌趋势中的运用一般情况下,股价或指数在跌至ENE下轨时会出现一定幅度的反弹,尤其是指数打下轨的情况比较少见(非理性暴跌除外)。
如果是指数打下轨,其反弹到中轨的幅度一般在5%左右,反弹到上轨的幅度一般在10%左右。
对于个股而言,其反弹获利的幅度要远大于指数。
4、ENE指标的买入方式在股价跌至ENE下轨,有些时候会出现ENE连续打下轨或跌穿下轨的情形,出现此种情形往往伴随着股价出现非理性下跌或者暴跌。
因此在选择稳妥的买入点时,我们可以参考5分钟均线是否走成多头排列。
5分钟均线的设置参数为5、10、20、30、40、50。
如果出现股价跌至ENE下轨附近并且5分钟均线走成多头排列(6条均线呈现多头排列),如能出现放量情形自然更加理想,说明有主力资金介入。
主要运输线路轨道铺设标准根据煤矿《安全规程》及行业管理要求,以及煤矿窄轨铁道维修质量及检查评级标准,制定本矿主要运输线路轨道铺设标准。
1.轨道中心线符合要求,偏差不得大于±50mm;在曲线段内应设置轨距拉杆,轨枕间距偏差不大于±50mm。
2.轨距标准为600mm,上偏差不得大于+5mm,下偏差不得大于-2mm,弯道要求平滑无硬弯。
铺设窄轨曲线需将轨距加宽、外轨抬高。
加宽量10mm,递减率1%,外轨抬高20mm,顺轨率1%。
3.扣件必须统一、齐全、紧固有效且与轨型相符。
接头平整,间隙不得大于5mm,高低和左右错差不得大于2mm。
夹板不得反装,螺栓一正一反交互安装。
4.道钉数量齐全,钉顶锤痕呈豆形,无浮、离、扭、弯、仰、俯、磨八害现象。
5.轨道接头间隙不大于5mm。
直线段应对接,相对错距不大于50mm。
6.直线段两条钢轨顶面的高低差不得大于5mm。
7.尖轨根部轨缝不得大于8mm,其余轨缝不得大于5mm,左右、高低偏差不得大于2mm;尖轨尖端同基本轨间隙不大于2mm,在尖轨顶面宽20mm 处同基本轨到底差不的大于2mm;尖轨尖端开程80~110mm。
8.扳道器位置及方向安装正确,动作部分灵活可靠;各连接部位销子、平垫、开口销等齐全稳固;扳道器轨枕与扳道器中心线、基本轨垂直。
9.滑床板不得反装,同轨底面间隙不得大于2mm。
10.同一线路必须使用同一型号钢轨,同一线路无杂拌道。
11.路基无严重蹋坡、底鼓、沉降现象。
12.道床整洁、道渣不埋轨枕面,应无积水、无淤泥、无浮煤。
13.轨道线路、轨面直线目视平顺。
14.轨枕规格要求长×宽×高1200 ×160×140mm;15.轨枕间距:中间段为700mm;过渡段为570mm,悬接段为230mm误差±50mm。
轨枕下需垫实。
轨枕腐朽,损坏,断裂至不起作用必须更换。
16.行人车轨道道木要外露三分之一。
ntn 低轨轨道高度
NTN低轨轨道高度是指NTN卫星在地球上空的轨道高度。
NTN是一种低轨通信卫星系统,它被设计用于提供广播、互联网和移动通信等服务。
为了确保卫星能够有效地传输信号并与地面站进行通信,NTN卫星需要在特定的轨道高度上运行。
NTN低轨轨道高度通常在1000到2000公里之间。
这个高度相对较低,与其他卫星系统相比,具有明显的优势。
首先,低轨高度意味着信号传输的延迟较低。
由于卫星距离地面站较近,信号传输的时间更短,从而实现了更快的通信速度。
其次,低轨高度可以减少信号衰减和丢失的可能性。
由于卫星与地面站之间的距离较短,信号强度更高,接收质量更好。
NTN低轨轨道高度的选择是经过深思熟虑的。
考虑到卫星的使用目的和技术要求,选择了这个高度范围。
然而,这个高度也带来了一些挑战。
首先,卫星需要维持稳定的轨道,以确保持续的通信连接。
这需要精确的轨道控制和导航系统。
其次,卫星需要抵御地球大气层的影响。
在低轨高度,大气阻力较大,会对卫星的运行和寿命产生影响。
因此,卫星需要具备相应的防护措施和维护计划。
总的来说,NTN低轨轨道高度是经过充分考虑和优化的选择。
它能够提供快速、稳定和高质量的通信服务,同时也面临着一些挑战。
随着技术的不断发展,人们对NTN卫星系统的需求也在不断增加,相信未来会有更多创新和突破,使NTN卫星系统发挥更大的作用。
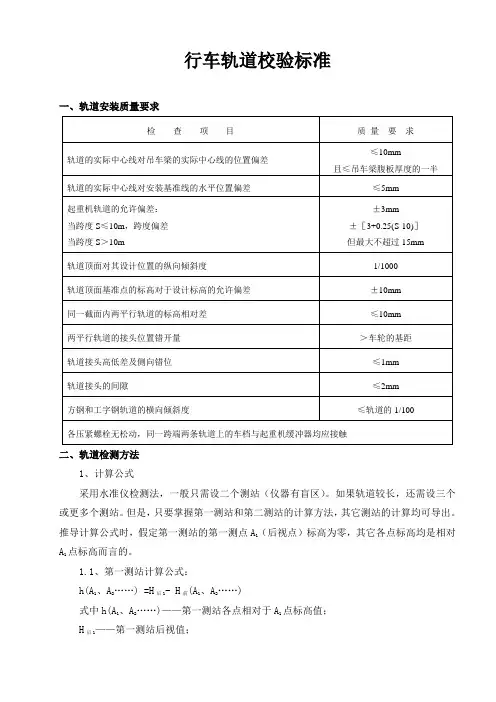
行车轨道校验标准一、轨道安装质量要求二、轨道检测方法1、计算公式采用水准仪检测法,一般只需设二个测站(仪器有盲区)。
如果轨道较长,还需设三个或更多个测站。
但是,只要掌握第一测站和第二测站的计算方法,其它测站的计算均可导出。
推导计算公式时,假定第一测站的第一测点A1(后视点)标高为零,其它各点标高均是相对A1点标高而言的。
1.1、第一测站计算公式:h(A1、A2……) =H后1- H前(A1、A2……)式中h(A1、A2……)——第一测站各点相对于A1点标高值;H后1——第一测站后视值;H前(A1、A2……)——第一测站各点前视值。
水准仪置于第二测站后,改变了仪器高程。
这样,第二测站各点的视值与第一测站A1点视值产生一个高程差值。
因此,第二测站的计算过程应采用高程差值修正法,将第二测站各点前视值变成第一测站各点前视值,方可按第一测站公式进行计算。
但是,此种计算方法比较复杂,故在这里不详细介绍。
为了使第二测站各点标高值的计算简单化,这里着重介绍后视点标高加入法。
此种方法,是将第二测站的后视值与第二测站的前视值之差的结果,再与第一测站最后一测点标高值之代数和,即是该点的标高值。
1.2、第二测站计算公式:h(An 、An-1……) = H后2- H前(An、An-1……)+n重式中h(An 、An-1……)——第二测站各点相对于A1点标高值;H后2——第二测站后视值;H前(An、An-1……) ——第二测站各点前视值;n重——第一测站最后一测点标高值(即重合点标高值)。
2、大车轨道标高的水准仪检测例1:有一起重机,轨道长42m,检测其单根轨道标高及两轨道相对标高,并绘制其轨道曲线图。
如图1所示。
2.1、检测过程2.1.1、工具配备水准仪一架,1m钢板尺一支;2.1.2、设置测站在大车轨道A和B上,每隔3m设一测点,共15点。
若新安装图1 第一测站测量图或要调整的轨道,最好每块压板位 1、测尺(第一测站后视);置设一侧点,这样精度高,并可根 2、第一测站最后一测点(重合点);3、水准仪;据曲线图选择最佳调整方案。
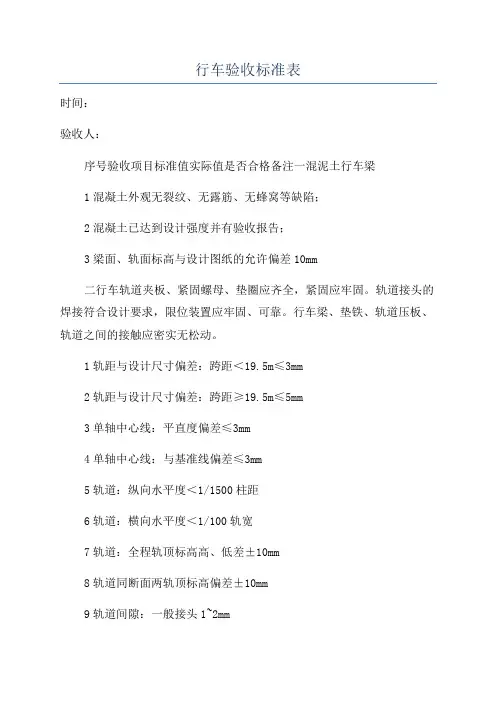
行车验收标准表时间:验收人:序号验收项目标准值实际值是否合格备注一混泥土行车梁1混凝土外观无裂纹、无露筋、无蜂窝等缺陷;2混凝土已达到设计强度并有验收报告;3梁面、轨面标高与设计图纸的允许偏差10mm二行车轨道夹板、紧固螺母、垫圈应齐全,紧固应牢固。
轨道接头的焊接符合设计要求,限位装置应牢固、可靠。
行车梁、垫铁、轨道压板、轨道之间的接触应密实无松动。
1轨距与设计尺寸偏差:跨距<19.5m≤3mm2轨距与设计尺寸偏差:跨距≥19.5m≤5mm3单轴中心线:平直度偏差≤3mm4单轴中心线:与基准线偏差≤3mm5轨道:纵向水平度<1/1500柱距6轨道:横向水平度<1/100轨宽7轨道:全程轨顶标高高、低差±10mm8轨道同断面两轨顶标高偏差±10mm9轨道间隙:一般接头1~2mm10轨道间隙:温度接头4~6mm11温度接头间隙设计偏差值≤1mm12轨道接头:横向错口≤1mm13轨道接头:高低差≤1mm三桥式起重机组合安装时应进行下列检查:1所有部件外观检查,确认各部分应无漏焊、无裂纹、螺栓无松动;2钢丝绳应无断股,规格型号与图纸相符;3缓冲器、限位器开关应安装牢固;4吊钩在最上方时,滚筒应能容纳全部钢丝绳,吊钩在最下方时,滚筒上至少应保留两圈钢丝绳;四桥式起重机组合安装的相关尺寸允许偏差:注:L为测量位置的车轮弦长1主梁跨距偏差≤5mm2主梁挠度0.9~1.3mm3桥架对角线允许偏差:箱型梁≤5mm4桥架对角线允许偏差:单腹板或桁架梁≤10mm5箱型梁旁弯度<1/2000跨距6单腹板、桁架梁旁弯度:跨距L≤16.5m≤5mm7单腹板、桁架梁旁弯度:跨距L>16.5mL/30008箱型梁小车规矩偏差:距端﹢2~﹣1mm9箱型梁小车规矩偏差:跨端跨距﹤19.5m1~5mm10箱型梁小车规矩偏差:跨中跨距≥19.5m1~7mm11单腹板和桁架梁小车轨距偏差≤3mm12小车轨道高低偏差:轨距≤3.5m≤3mm13小车轨道高低偏差:轨距≤4m≤5mm14小车轨道高低偏差:轨距>4m≤7mm15小车轮跨距偏差≤3mm16大车轮端面偏斜度≤L/1000,且两主动轮(或从动轮)偏斜方向相反17同一平衡梁上两车轮同位差≤1mm18同一端距离最远两车轮同位差≤3mm19大车轮垂直偏斜度≤L/40020各传动轴晃度≤1mm五桥式起重机吊装前,对机械部套应进行下列检查:1走轮悬空,用手旋转各传动机构,走轮和各传动构件应旋转灵活,无卡涩2齿轮箱应无渗漏,手孔盖及垫料等应严密3各部分铆钉、螺钉应齐全、紧固4各滚筒、吊钩滑轮和车轮等部件经外观检查应无伤痕、无裂纹5相连接的各传动轴应无弯曲,晃度允许值1mm6各轴应传动灵活,吊钩、滑轮及传动轴的轴承应清洁,注油装置齐全、畅通;7传动齿轮、联轴器等外露的传动部件应装设保护罩8小车车轮跨度的允许偏差3mm六桥式起重机吊装后应检查下列各项并符合规定:1行走机构的检查应以主动轮外侧面为基准2大车各车轮端面应与轨道平行,偏斜度p应小于l/1000,且两个主动轮或从动轮的偏斜方向应相反3装在同一平衡梁上的两个车轮同位差应小于1mm;同一端梁下距离最远车轮间的同位差应小于3mm。
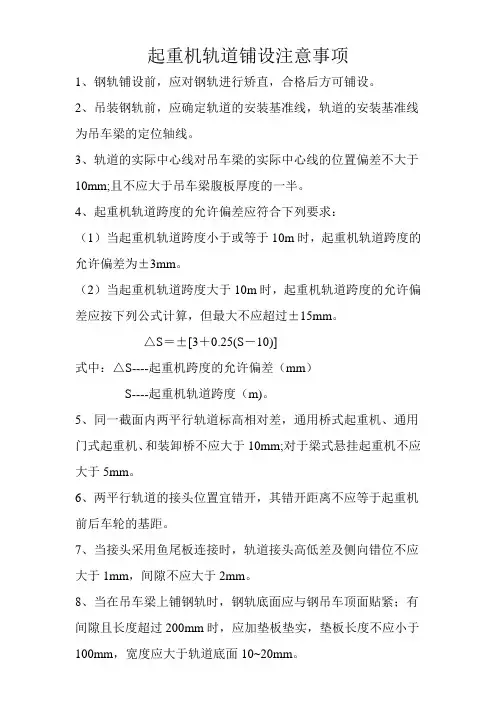
起重机轨道铺设注意事项
1、钢轨铺设前,应对钢轨进行矫直,合格后方可铺设。
2、吊装钢轨前,应确定轨道的安装基准线,轨道的安装基准线为吊车梁的定位轴线。
3、轨道的实际中心线对吊车梁的实际中心线的位置偏差不大于10mm;且不应大于吊车梁腹板厚度的一半。
4、起重机轨道跨度的允许偏差应符合下列要求:
(1)当起重机轨道跨度小于或等于10m时,起重机轨道跨度的允许偏差为±3mm。
(2)当起重机轨道跨度大于10m时,起重机轨道跨度的允许偏差应按下列公式计算,但最大不应超过±15mm。
△S=±[3+0.25(S-10)]
式中:△S----起重机跨度的允许偏差(mm)
S----起重机轨道跨度(m)。
5、同一截面内两平行轨道标高相对差,通用桥式起重机、通用门式起重机、和装卸桥不应大于10mm;对于梁式悬挂起重机不应大于5mm。
6、两平行轨道的接头位置宜错开,其错开距离不应等于起重机前后车轮的基距。
7、当接头采用鱼尾板连接时,轨道接头高低差及侧向错位不应大于1mm,间隙不应大于2mm。
8、当在吊车梁上铺钢轨时,钢轨底面应与钢吊车顶面贴紧;有间隙且长度超过200mm时,应加垫板垫实,垫板长度不应小于100mm,宽度应大于轨道底面10~20mm。
轨道安装的技术要求:一:轨道接头可以做成直的或45度斜的,斜接头可使大车轮在接头处平稳过渡;正常街头的缝隙为1-2毫米,在寒冷地区冬季施工或安装前的气温低于常年使用气温20度以上时,应考虑温度缝隙,在单根钢轨长10米左右时可取4-6毫米包括正常缝隙二:接头处两轨道的横向错位和高低差均应小于等于1毫米三:在同一截面上的轨面高低差:对桥式起重机;在柱子出不超过10毫米在其他处不得超过15毫米,门式起重机不得超过10毫米,跨度大于40米的门式起重机和装卸桥不得超过15毫米四:同一侧轨道面,在两根柱子间的标高与相邻柱子间的标高差不得超过B/1500B为柱子间距离,单位毫米但最大不超过10毫米五:轨道跨度轨道中心与承轨梁中心轨道不直等误差不得超过参照轨道安装误差表轨道梁制作时必须保证沿梁横向及纵向的预留螺栓孔位置偏差≤5mm,螺栓孔直径比螺栓直径大2~7mm,梁顶面要求平整,但不得抹压光滑;2 轨道梁的安装偏差必须满足下列要求,否则要调整好轨道梁后才允许用混凝土找平;①梁中心位置对设计定位轴线的偏差≤5mm;②梁顶面标高对设计标高的偏差+10mm-5mm;③梁上预留螺栓孔及预留螺栓对梁中心的位移偏差≤5mm;3 混凝土找平层的施工要求①混凝土找平层强度等级为C30,厚度为30~50mm;②混凝土找平层施工前应按要求检查轨道梁的安装偏差,如不符合要求,则应调整轨道梁;③根据轨道梁面的实测标高,确定一个合适的混凝土找平层顶面控制标高,在轨道梁上每隔214~310m设置一个控制标高的基准点;④用仪器测量,调整好基准点的标高,定出找平层顶面标高的基准线,然后安装模板,清除轨道梁顶面和螺栓孔内的杂物,并将螺栓孔上口堵住,洒水湿润后即可浇筑混凝土;⑤找平层顶面必须找平压光,不得有石子外露和凹不平现象,不允许采用在表面另铺水泥砂浆的方法找平;⑥施工中要随时用仪器测量检查,找平层顶面必须满足下列要求:螺栓处400mm宽度范围内顶面不水平度≤5mm;任意610m长度内务螺栓处顶面标高差±3mm;沿全长各螺栓处顶面标高差±5m;⑦混凝土采用机械搅拌,施工时应加强养护,当混凝土试块达到75%强度设计值,方可进行轨道安装工作;对钢结构轨道梁的要求1 轨道梁的跨中垂直度≤h/500,h为轨道梁的梁高;2 轨道梁的水平旁弯≤l/1500,且净10mm,l为轨道梁的梁长;3 轨道梁垂直方向上拱≤10mm;4 轨道梁中心位置对设计定位轴线的偏差≤5mm,如不符合要求,则应调整轨道梁定位后,才能安装轨道;5 同跨内同一横截面轨道梁顶面高度差在支座处≤10mm,其他处≤15m;6 同列相邻2柱间轨道梁顶面高度差≤l/1500,且≯10mm,l为轨道梁的梁长;7 相邻2轨道梁接头部位,2轨道梁顶面高度差≤1mm,中心侧向错位≤3mm;。

轨道整修验收质量标准1、轨道要求:⑴轨道中心线与提升中心线重合,偏差不大于±50mm。
⑵轨距上偏差为5mm,下偏差为-2mm,轨道接头间隙不大于5mm,高低和左右错差不大于2mm。
⑶轨枕间距中段为700mm,轨道接头处为400 mm,误差不大于50mm,轨枕与轨道中心线垂直,误差不大于10度;轨距拉杆间距为4米,误差不大于0.5米;沿轨道中心线方向距离误差不大于0.5米,左右方向位置误差不大于50mm。
⑷轨枕1/2~2/3要埋入煤中,轨枕下煤应捣密实。
⑸钢轨顶面的高低用10米弦量轨面前后高低不超过15mm。
⑹坡度误差50米内不超过1/1000,即50米内高差不超过50mm。
⑺道岔中心位置与现场标定位置一致,沿轨道中心线方向距离误差不大于0.2米,左右方向位置误差不大于100 mm。
⑻接头方式:接头采用悬接;直线段对接,相对错距不大于50mm曲线段错接,相对错距不大于2米。
⑼弯道处轨距620mm,轨枕为木枕木,间距中段为700mm,误差不大于50mm,轨枕与轨道中心线垂直,误差不大于10度;轨距拉杆间距为1.5米,误差不大于0.5米。
⑽轨道中间段不得出现长度小于2米的轨道,合口时出现小于2米时应将原轨道截断保证对接轨道大于2米。
2、道岔敷设要求:⑴轨距:按标准加宽后不大于3mm;辙岔前后的轨距偏差+3 mm,-0 mm。
⑵水平:尖轨前端、直曲边接轨中部和道岔后部的两股钢轨的水平偏差不大于15 mm。
⑶方向:直线目视直顺,用10米弦量不超过10 mm;曲线目视圆顺,用1米弦量相邻两点正矢差不大于2 mm,用2米弦量相邻两点正矢差不大于3 mm。
⑷轨面前后高低:目视平顺,用10米弦量不超过10 mm;⑸接头平整度:接头处两轨面高低和内侧错差不大于2 mm;⑹尖轨:尖轨尖端与基本轨密切,间隙不大于2 mm,无跳动;尖轨损伤长度不超过100 mm,在尖轨顶面宽20mm处与基本轨高低差不大于2 mm;⑺开程:尖轨开程为80~110mm。
平面控制网CPI、CPII和二等高程控制网施工复测前言1、三网合一勘测设计、施工、运营维护控制网使用同一控制网。
内容包括:●三网平面坐标、高程系统统一;●三网起算基准统一;●线下工程施工控制网、轨道施工控制网、运营维护控制网的平高坐标系统与起算基准统一;●三网测量精度统一协调。
2、无砟轨道工程测量精度终极目标要求,客专无碴轨道铺设精度检验标准:●10m弦长轨道高低偏差<2mm,轨向偏差<2mm。
●150m弦长轨道高低偏差<10mm,轨向偏差<10mm。
●沉降观测点的高程中误差应小于1mm(路基的工后沉降不应大于30mm)。
3、控制网基准:位置基准、方位基准、尺度基准。
采用更高级控制点作为起算基准或约束条件,可以解决控制网基准的问题:CP0→CPI→CPII→CPIII一般:50~100km布设一个框架点CP0;4km布设一对CPI控制点;1km布设一个CPII点;150m~200m布设一个CPIII点。
施工时分段复测CPI,联测CP0点可能有难度。
1、CP0超出现规范的范畴。
2、CP0框架点一般不会交给施工单位使用,也系保密资料。
3、长度较远,可能存在于两个不同的坐标投影带,而设计资料一般也只有其中一个投影带的成果,大多交付的是两个投影带附近部分重叠控制点的坐标成果。
4、施工复测的程序:(1)复测方案与技术设计,并报监理、业主审批;(2)复测外业测量,监理平行作业或旁站;(3)测量内业资料处理;(4)复测成果报告,报监理、业主审查批复。
5、复测方案与技术设计的内容:(1)测量项目概况:任务来源,测区地理位置、测量范围、地形地貌概述、测区控制点的数量、保存情况等。
(2)作业依据:执行技术规范,设计资料等。
(3)测量仪器设备类型、数量等配置、测量人员组织等情况。
(4)设计资料与坐标系统参数。
(5)测量实施方案:测量精度,控制网组网方式、联测CP0方案;观测作业技术要求、测量操作程序等;测量进度计划,进度、质量、精度保障措施,对影响本期测量作业的因素做好处理预案。
d10型离子配合物高低自旋离子配合物是由中心金属离子和周围配体通过配位键结合而形成的复合物。
其中,d10型离子配合物是指中心金属离子的d轨道全部被电子填满的配合物。
这类配合物的电子构型具有特殊性质,其中一个重要的性质就是高低自旋的变化。
高自旋和低自旋是指d10型离子配合物中金属离子的d轨道电子的自旋排布情况。
根据洪特规则,电子在填充轨道时,会尽量使自旋相同的电子占据不同的轨道,以达到能量最低的状态。
在d10型离子配合物中,由于所有的d轨道已经被电子填满,因此没有自旋向上或自旋向下的电子。
但是,由于配体的作用,会导致一部分电子发生自旋反平行的现象,从而形成高自旋和低自旋两种不同的态。
在高自旋状态下,电子的自旋方向相同,电子云具有较大的体积。
由于自旋相同的电子排斥,电子云会向外扩展,形成较宽的电子云。
这种情况下,配合物的体积较大,通常呈现高自旋状态的配合物具有较大的晶体结构,具有较强的磁性和较大的分子磁矩。
而在低自旋状态下,电子的自旋方向相反,电子云具有较小的体积。
由于自旋相反的电子吸引,电子云会向内收缩,形成较小的电子云。
这种情况下,配合物的体积较小,通常呈现低自旋状态的配合物具有较小的晶体结构,具有较弱的磁性和较小的分子磁矩。
高自旋和低自旋的转变是由于配体的作用导致的。
当配体对金属离子施加的场强增加时,电子云会更加受限,电子会向内收缩,从高自旋态转变为低自旋态。
反之,当配体对金属离子施加的场强减小时,电子云会更加扩展,电子会从低自旋态转变为高自旋态。
这种高自旋和低自旋的转变是可逆的,可以通过改变配体或改变外界条件来实现。
除了配体的作用,其他因素也会影响d10型离子配合物的高低自旋态。
例如,温度的变化会导致金属离子的d轨道电子发生自旋转变,从而影响配合物的高低自旋态。
此外,配体的电荷和配体的场强也会影响配合物的高低自旋态。
在实际应用中,d10型离子配合物的高低自旋态具有重要的意义。
由于高低自旋态的不同,配合物具有不同的物理和化学性质。
轨道参数表(总16页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--常见资源卫星轨道参数遥感器参数ETM+增强的专题绘图仪(Enhanced Thematic Mapper Plus)HRV性能参数表SPOT-1,2,3 HRV 观测参数SPOT-4 HRVIR 观测参数高分辨率成像装置(HRG) 特性立体成像装置 (HRS)植被成像装置 (VEGETATION)地球观测系统EOS (Earth Observation System)Terra卫星sun-synchronous,near-polar, circular轨道高度 705KM轨道倾角 98°降交点地方时 10:30扫描宽度覆盖周期 16天设计寿命 6年一天可过境4次中分辨率成像波谱仪 --MODIS (Moderate resolution Imaging Spectroradiometer)星载高级热辐射与反射辐射计ASTER(Advanced Spaceborne Thermal Emission and Reflection Radiometer)新千年计划(NMP)NMP计划的第一颗卫星,地球观测1号卫星(Earth Observatory)(EO-1)于2000年4月发射。
EO-1轨道高度705km,太阳同步,倾角°,通过赤道当地时间与Landsat 7仅相差一分钟,对全球覆盖一次周期16天。
EO-1卫星上的三个遥感器分别是:高级陆地成像仪(ALI)、Hyperion、LEISAR大气校正仪(LAC)。
EO-1 高级陆地成像仪 ALI(Advanced Land Imager )MS/PAN Spectral and Spatial Coverage大气校正仪 LAC ( LEISA Atmospheric Corrector )EO-1 Instrument Overviews海洋测绘观测计划(NEMO)NEMO卫星定于2000年中发射,轨道高度605km,太阳同步,轨道倾角,过赤道当地时间10:30am,对地球重复覆盖周期7天,可以以一周为周期提供地球的动态数据。