F01-非圆齿轮节曲线2012.3.4
- 格式:pdf
- 大小:233.76 KB
- 文档页数:1
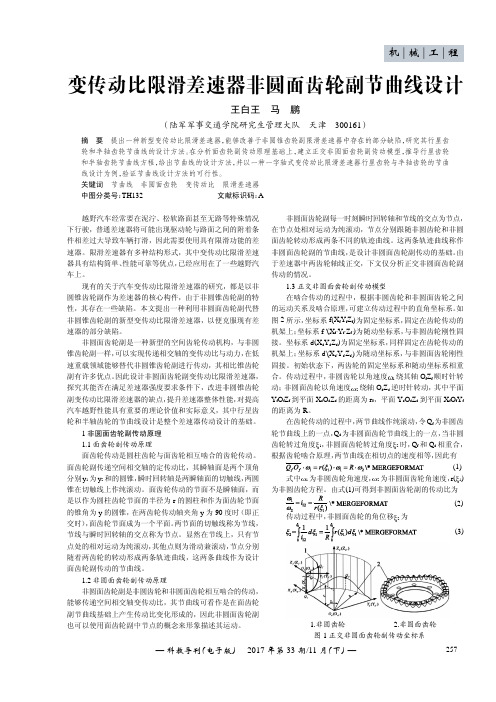
变传动比限滑差速器非圆面齿轮副节曲线设计王白王马鹏(陆军军事交通学院研究生管理大队天津300161)摘要提出一种新型变传动比限滑差速器,能够改善于非圆锥齿轮副限滑差速器中存在的部分缺陷,研究其行星齿轮和半轴齿轮节曲线的设计方法。
在分析面齿轮副传动原理基础上,建立正交非圆面齿轮副传动模型,推导行星齿轮和半轴齿轮节曲线方程,给出节曲线的设计方法,并以一种一字轴式变传动比限滑差速器行星齿轮与半轴齿轮的节曲线设计为例,验证节曲线设计方法的可行性。
关键词节曲线非圆面齿轮变传动比限滑差速器中图分类号:TH132文献标识码:A越野汽车经常要在泥泞、松软路面甚至无路等特殊情况下行驶,普通差速器将可能出现驱动轮与路面之间的附着条件相差过大导致车辆打滑,因此需要使用具有限滑功能的差速器。
限滑差速器有多种结构形式,其中变传动比限滑差速器具有结构简单、性能可靠等优点,已经应用在了一些越野汽车上。
现有的关于汽车变传动比限滑差速器的研究,都是以非圆锥齿轮副作为差速器的核心构件,由于非圆锥齿轮副的特性,其存在一些缺陷。
本文提出一种利用非圆面齿轮副代替非圆锥齿轮副的新型变传动比限滑差速器,以便克服现有差速器的部分缺陷。
非圆面齿轮副是一种新型的空间齿轮传动机构,与非圆锥齿轮副一样,可以实现传递相交轴的变传动比与动力,在低速重载领域能够替代非圆锥齿轮副进行传动,其相比锥齿轮副有许多优点。
因此设计非圆面齿轮副变传动比限滑差速器,探究其能否在满足差速器强度要求条件下,改进非圆锥齿轮副变传动比限滑差速器的缺点,提升差速器整体性能,对提高汽车越野性能具有重要的理论价值和实际意义,其中行星齿轮和半轴齿轮的节曲线设计是整个差速器传动设计的基础。
1非圆面齿轮副传动原理1.1面齿轮副传动原理面齿轮传动是圆柱齿轮与面齿轮相互啮合的齿轮传动。
面齿轮副传递空间相交轴的定传动比,其瞬轴面是两个顶角分别y1为y2和的圆锥,瞬时回转轴是两瞬轴面的切触线,两圆锥在切触线上作纯滚动。

心形非圆齿轮副节曲线设计研究侯晓超;黄颖为【摘要】介绍了一种新型非圆齿轮副——心形非圆齿轮,从啮合传动特性出发分析了该非圆齿轮的运动规律,重点阐述了用三次曲线分段构造心形非圆齿轮节曲线,并列举工程实例验证该节曲线设计方法.通过Matlab计算作图,给出了心形非圆齿轮传动转角函数曲线、从动轮角速度变化曲线和角加速度变化曲线.计算作图的结果表明,该非圆齿轮的运动过程满足设计要求,角加速度变化曲线基本光滑,说明运动比较平稳,没有大的冲击.【期刊名称】《西安理工大学学报》【年(卷),期】2014(030)004【总页数】4页(P486-489)【关键词】非圆齿轮;节曲线设计;心形非圆齿轮【作者】侯晓超;黄颖为【作者单位】西安理工大学印刷包装工程学院,陕西西安710048;西安理工大学印刷包装工程学院,陕西西安710048【正文语种】中文【中图分类】TH132.429非圆齿轮是产生非匀速运动的机构之一,相对于匀速的输入能够方便地得到非匀速的输出,它综合了圆形齿轮和凸轮机构的优点, 能准确地以变传动比传递较大的动力,具有传动平稳精确、传递效率高和结构紧凑的优点,已被广泛应用于包装机械、印刷机械、泵、流量计等轻工设备中[1] 。
非圆齿轮节曲线是非圆齿轮设计的关键[2] ,人们在非圆齿轮方面的研究已取得了一定的成就,但是在设计方面,对于非圆齿轮节曲线的形状还未能寻找出一种有效的控制方法[3-4] 。
因为并非任意形状的曲线都能用作非圆齿轮节曲线,实用的非圆齿轮节曲线形状受到许多限制[5] ,导致节曲线封闭的非圆齿轮的种类较少[5] ,因此开发具有新式传动特性的非圆齿轮是十分必要的[6] 。
心形非圆齿轮及其共轭齿轮传动是一种新式变传动比传动,可以实现不同于椭圆齿轮和偏心圆齿轮的传动规律[7] 。
1 心形非圆齿轮的传动特性及节曲线设计设计非圆齿轮的主要任务就是确定它的节曲线。
节曲线实际上是一对相互啮合的齿轮在其啮合过程中实现无滑动地滚动的共轭曲线[8] 。

非圆齿轮的设计与建模李翔;刘燕【摘要】本文对非圆齿轮进行设计以及pro e建模,介绍了主动轮与从动轮节曲线的计算;压力角、根切、凹凸性的校核;齿数的确定;并以椭圆齿轮为例详细阐述了绘制节曲线及齿廓曲线的过程。
【期刊名称】《产业与科技论坛》【年(卷),期】2016(015)010【总页数】2页(P68-69)【关键词】椭圆齿轮;设计;proe;建模【作者】李翔;刘燕【作者单位】上海工程技术大学;上海工程技术大学【正文语种】中文圆柱齿轮是应用普遍的机械传动机构,但非圆齿轮与圆齿轮相比具有传动比可变的优点,即当主齿轮做匀速运动时从动齿轮做变速运动,非圆齿轮的每个齿廓都不尽相同,设计和建模的过程都较为复杂,而且现阶段的cad建模工具没有提供较为方便的非圆齿轮的建模模块,所以如何快速进行非圆齿轮的设计与建模成为一大难题,本文提供了一种非圆齿轮设计及建模的方法。
非圆齿轮的设计主要包括节曲线的设计和齿型参数的确定。
若已知条件为非圆齿轮的传动比函数i12,模数m,中心距a。
(一)确定节曲线方程[1]。
设主动轮的瞬时角速度为ω1,从动轮的瞬时角速度ω2,当椭圆齿轮在任意瞬时,总有一个相对运动速度等于零的点p,称为瞬时回转中心,它位于非圆齿轮的连心线上,且满足条件:=所以可得:i12===化简可得主动轮方程:r1(φ1)=其中r1(φ1)为主动轮节曲线的向径。
从动轮节曲线方程也确定了(二)校准压力角、根切、凹凸性[2~3]。
非圆齿轮的压力角是变化的,变压力角易引起齿轮副的震动,压力角过大导致齿轮副自锁,甚至无法转动。
节曲线方程确定后求出最大压力角并与许用压力角比较。
节曲线上各点的曲率半径不同,曲率半径最小处易产生根切,齿轮的根切减弱了齿根部的强度与承载能力,求出最小的曲率半径,判断是否产生根切。
节曲线的凹凸性影响椭圆齿轮加工的方法,节曲线无内凹可用滚刀、齿条刀或插齿刀切制,而具有内凹的非圆齿轮则只能用插齿刀加工。
主动轮无内凹的条件从动轮无内凹的条件若节曲线最大压力角太大,或产生根切或内凹,则需修改输入的参数重新设计。
非圆齿轮建模和运动学仿真陈雨青;李文长;张俊;徐岩【摘要】非圆齿轮具有变传动比、传动平稳的特点,在防滑差速器中得到了广泛的应用.文中详细地阐述了非圆齿轮节曲线的设计方法,并以椭圆齿轮为例,基于SolidWorks对椭圆齿轮进行建模和运动学仿真,验证了其设计理论和建模方法正确性.【期刊名称】《机械工程师》【年(卷),期】2016(000)011【总页数】3页(P19-21)【关键词】非圆齿轮;节曲线;SolidWorks;仿真【作者】陈雨青;李文长;张俊;徐岩【作者单位】军事交通学院研究生管理大队,天津300161;军事交通学院研究生管理大队,天津300161;军事交通学院研究生管理大队,天津300161;军事交通学院研究生管理大队,天津300161【正文语种】中文【中图分类】TH132.424为提高越野汽车的防滑性能,车辆在驱动轴之间安装防滑差速器[1],此种差速器的特点是不差速条件下输入、输出两轴转速相同,但在有使用条件时输入、输出两轴转速不等。
在防滑差速器中大量采用了非圆齿轮。
国内许多学者对非圆齿轮建模进行了研究,吴俊峰、吕小波等[1]提出利用Maple和SolidWorks对非圆齿轮进行建模的方法;高雪强、葛敬侠[3]提出了利用SolidWorks二次开发接口的方法,运用计算机语言编程的方法实现渐开线齿轮的绘制。
但以上两种方法对计算机语言及软件使用能力的要求较高,给初学者带来了很多不便。
如何在满足要求的情况下快速准确地进行非圆齿轮的建模是一个值得研究的问题。
为此本文以椭圆齿轮为例,介绍了基于SolidWorks的建模方法。
1.1 非圆齿轮节曲线方程节曲线是一对啮合齿轮在相互啮合时发生无滑动的纯滚动时的啮合曲线。
非圆齿轮的特点就在于节曲线不是圆,而是非圆形曲线。
1)非圆齿轮主动轮的节曲线方程[4]:式中:i12为传动比,i12=i12(φ1);φ1为非圆齿轮主动轮的极角;A为两齿轮的中心距。
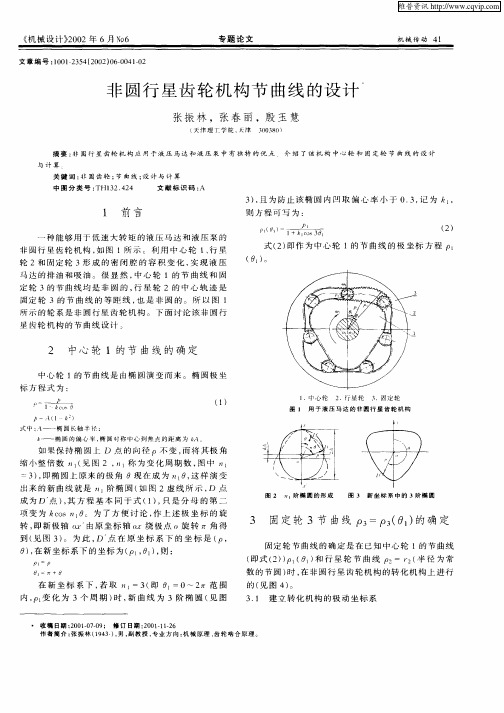
基于Matlab 的非圆行星齿轮机构节曲线求解李 磊,杜长龙,杨善国(中国矿业大学机电工程学院,江苏徐州221008)摘要:合理的节曲线设计是可用于低速大扭矩液压马达的变中心距非圆行星齿轮机构正常工作的关键。
非圆太阳轮的节曲线由椭圆演变而来,非圆内齿圈的节曲线通过非圆行星齿轮机构的转化机构求解。
在理论分析的基础上,采用Matlab 为工具,以某型变中心距非圆行星齿轮机构为例对其节曲线进行了求解。
关键词:节曲线;非圆行星齿轮;Matlab 中图分类号:TH1321425 文献标志码:A 文章编号:100320794(2008)0120023203Solving of N on -circular Planetary G ear Pitch Curve B ased on MatlabLI Lei ,DU Ch ang -long ,YANG Sh an -guo(C ollege of Mechanical and E lectronic Engineering of China University of M ining and T echnology ,Xuzhou 221008,China )Abstract :Appropriate pitch curve designing is a key of regularly w orking for non -circular planetary gear mechanism with variable center distance which can be used in low speed high torque hydraulic m otor.The pitch curve of sun gear is ev olved from ellipse and that of internal gear is s olved through the invert mechanism of the non -circular planetary gear mechanism.The pitch curve of a non -circular planetary gear mechanism with variable center distance is s olved with Matlab based on the theory analysis.K ey w ords :pitch curve ;non -circular planetary gear ;Matlab0 前言1977年波兰人B.Sieniawski 开发出了S OK 型非圆行星齿轮低速大扭矩液压马达,相比于传统的低速大扭矩液压马达具有结构简单、体积重量小、效率高及对污染敏感性低等优点。
非圆齿轮节曲线设计的新方法
田立俭
【期刊名称】《机械工程学报》
【年(卷),期】1997(33)6
【摘要】通过将非圆齿轮转化成高精度分段圆齿轮的节曲线设计新方法,使得用圆齿轮代替非圆齿轮节曲线后,其逼近误差和弧长误差可控制到很小,从而使非圆齿轮的设计及加工问题简化成圆齿轮来解决,并在导出一种非圆齿轮低速大扭矩液压马达节曲线公式的基础上,用该方法对节曲线进行圆弧逼近,得到了极高的弧长封闭精度及逼近精度。
【总页数】8页(P95-102)
【关键词】非圆齿轮;圆弧;逼近;节曲线;误差
【作者】田立俭
【作者单位】北京煤矿机械厂工艺研究所
【正文语种】中文
【中图分类】TH132.424
【相关文献】
1.基于B-spline曲线的非圆齿轮节曲线设计 [J], 曹凤琼
2.具有圆柱内齿轮的非圆行星齿轮机构节曲线的设计 [J], 唐德威;徐晓俊;李丹;李华敏
3.分插推培机构非圆齿轮节曲线设计分析与加工 [J], 万苏文; 庞建华
4.自由节曲线非圆齿轮驱动差速泵设计与性能试验 [J], 徐高欢; 谢荣盛; 孙培峰; 赵华成
5.基于样条插值方法的非圆齿轮节曲线设计缺陷的修正 [J], 刘琴琴;吕刚;邓星桥因版权原因,仅展示原文概要,查看原文内容请购买。
2椭圆齿轮的结构设计2.1椭圆的基本数学理论2.1.1椭圆定义椭圆定义:平面内到一定点距离与到一定直线距离之比为一个常数 e (0<e<1)的动点M的轨迹称为椭圆。
其中,该定点称为椭圆的焦点,定直线称为该焦点对应的准线,e称为椭圆的离心率。
2.1.2椭圆的方程如图2.1所示,以原点为圆心,分别以a、b(a>b>0)为半径作两个圆,点B 是大圆半径OA 与小圆的交点,过点A 作AN⊥Ox,垂足为N,过点B作BM⊥AN,垂足为M,求当半径OA绕O旋转时点M的轨迹的参数方程。
图2.1 椭圆形成示意图解:设M点的坐标为(x,y), 是以O x为始边,OA为终边的正角,取为参数。
那么,(2.1)以上(2.1)式即为椭圆的参数方程,其中称为“离心角”对(1)式进行消参(2.2)以上(2.2)式即为椭圆的标准方程。
2.2齿轮的基本理论2.2.1齿轮传动齿轮传动是机械传动中最重要的传动之一,形式很多,应用广泛,传递的功率可达数十万千瓦,它的圆周速度和转速分别可达300m/s,100000r/min。
同摩擦轮传动和带轮传动相比较,齿轮传动齿轮传动具有传动功率大,效率高,寿命长及传动平稳等特点[2]。
齿轮传动特点:(1)效率高在常用的机械传动中,以齿轮传动效率为最高。
例如一级圆柱齿轮的传动效率可达99%。
这对大功率传动十分重要,因为即使效率提高1%,也有很大的经济意义。
(2)机构紧凑在同样的使用条件下,齿轮传动所需空间尺寸一般较小。
(3)工作可靠、寿命长设计制造正确合理、使用维护良好的齿轮传动,工作十分可靠,寿命可长达一、二十年,这也是其他机械传动所不能比拟的。
(4)传动比稳定传动比稳定往往是对传动性能的基本要求。
齿轮传动获得广泛应用,也就是由于具有这个特点。
2.2.2圆柱齿轮结构圆柱齿轮可分为直齿圆柱齿轮、斜齿圆柱齿轮、人字齿轮、曲线齿圆柱齿轮。
其中直齿圆柱齿轮简称直齿轮,其轮齿排列与轴线平行;斜齿圆柱齿轮简称斜齿轮,其轮齿与轴线斜成一个角度,沿轴线螺旋方向排列在圆柱体上;人字齿轮形如“人”字,相当于两个全等但旋向相反的两个斜齿轮拼接而成;曲线齿圆柱齿轮简称曲线齿轮,其轮齿沿轴向弯曲成弧面。
非圆齿轮节曲线(F01)
1 机构分析
蜗线齿轮副节曲线如图1所示,齿轮1为蜗线齿轮,齿轮2为与蜗线齿轮共轭的齿轮,蜗线齿轮的基圆半径为R ,偏心距为e ,n 1为蜗线齿轮转动一周时,传动比变化的周期数,r 1、ϕ1分别表示蜗线齿轮的向径与极角,蜗线齿轮的节曲线极坐标与直角坐标方程分别为
图1 蜗线齿轮副节曲线
)11()cos(111−+= ϕn e R r )21(sin cos 111111−⎭
⎬⎫== ϕϕr y r x 若两齿轮的中心距为a ,d = a /R ,ε = e /R ,则其传动比i 21为
)31()]cos(1/[)]cos(1[/)(/1111112112−+−−=−== ϕεϕεωωn n d r r a i 齿轮2的节曲线极坐标与直角坐标方程分别为
)41(d )]}cos(1/[)]cos(1{[)
cos(10111112112−⎪⎭
⎪⎬⎫−−+=−−=∫ ϕϕϕεϕεϕϕn d n n e R a r )51(sin cos 222222−⎭
⎬⎫=−= ϕϕr y r a x 设n 2表示共轭齿轮2转动一周时,传动比变化的周期数,根据非圆齿轮节曲线封闭的约束条件,传动比函数应满足下式
)61(d )]}cos(1/[)]cos(1{[π21π20111112
−−−+=∫ n n d n n ϕϕεϕε 得d ,ε,n 1和n 2的关系为
)71(/21)/(2)/()1/)(1/(122
1222121212−++++++= n n n n n n n n n n d εε 当n 1 = 2,n 2 = 3时,蜗线齿轮副的节曲线形状如图1所示。
蜗线齿轮1、齿轮2上的点在固定坐标系XO 1Y 上的坐标(X 1,Y 1)、(X 2,Y 2)与xO 1y 坐标系上的坐标
(x 1,y 1)
、(x 2,y 2)之间的关系为 )81(cos sin sin cos 1111111111−⎭
⎬⎫+=−= ϕϕϕϕy x Y y x X )91(cos sin sin cos 2222222222−⎭
⎬⎫+=−= ϕϕϕϕy x Y y x X 2 课程上机内容与要求
机构的设计参数为,a =0.150 m 、ε =1/4、R =a /d 、e =ε·R 。
(1) 生成n 1 =2,n 2 = 3时,蜗线齿轮1的节曲线数值x 1i 、y 1i 的Excel 数据表文件,φ1的变化区间为0≤φ1i ≤2π,i =1,2,3, (360)
(2) 生成n 1 =2,n 2 = 3时,齿轮2的节曲线数值x 2i 、y 2i ,φ1的变化区间为0≤φ1i ≤2π,i =1,2,3, (360)
(3) 生成传动比i 12i 的Excel 数据表文件,φ1的变化区间为0≤φ1i ≤2π,i =1,2,3, (360)
(4) 制作机构的动画。