UG-NX运动仿真应用于机械结构设计
- 格式:docx
- 大小:146.87 KB
- 文档页数:11
基于UG的升降机构的建模及运动仿真升降机是工业自动化生产中非常重要的机构,广泛应用于各种机械设备的升降装置。
在升降机的构造中,升降机构是起到关键作用的部分之一。
本文将基于UG软件对升降机构进行建模和运动仿真。
首先,在UG软件中绘制出升降机构的三维模型。
升降机构主要由支架、升降柱、伸缩杆、导轨、保护套等零件组成。
在绘图过程中,需要根据具体的工程要求进行尺寸和配比的设计。
其次,根据升降机的工作原理和运动规律,建立升降机构的动力学模型,并对其进行运动仿真。
升降机的运动状态可以分为升降、下降、伸出和收回四种类型。
在每种状态下,升降机的运动规律都是不同的,需要针对性地进行建模和仿真。
在进行运动仿真时,需要当前升降机状态的初始参数,例如各个零部件的初始位置、速度、加速度等,同时还需要给定的系统参数,例如负载重量、电动机的功率等。
调整这些参数可以让仿真结果更加贴近实际。
最后,通过实际测量和仿真结果的对比,对升降机构进行优化改进。
对不合理的部分进行修正和调整,使其在升降、下降、伸出和收回等不同工况下均能保持良好的性能和稳定性,从而保证升降机的正常运转和安全性。
综上所述,通过UG软件对升降机构进行建模和运动仿真,可以充分了解升降机的结构和运动规律,有助于发现潜在的问题并加以优化改进,提高升降机的精度和有效性,提高生产效率和安全性,从而更好地满足工业自动化生产的需求。
数据分析是一个非常有效的方法,可以用来研究各种信息。
无论是个人还是公司,皆可以从数据分析中受益。
这里,我们将列出一些数据,并进行分析,以展示数据分析的价值和实际意义。
以一个假设的数据集为例:一家服装公司在过去三个月内销售了1000件女装,其中450件为裙子,300件为上衣,250件为外套。
以下是对该数据集的分析结果:1.销售额分析这家服装公司在过去三个月总共获得了销售额1500万美元。
从销售额来看,裙子销售额为675万美元,上衣销售额为450万美元,外套销售额为375万美元。
《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion 的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)◆无运动驱动(none):构件只受重力作用◆运动函数:用数学函数定义运动方式◆恒定驱动:恒定的速度和加速度◆简谐运动驱动:振幅、频率和相位角◆关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。
UGNX软件在高校机械专业教学中的应用【摘要】本文探讨了UGNX软件在高校机械专业教学中的应用。
在机械设计课程中,UGNX软件帮助学生进行CAD建模和分析,提高他们的设计水平;在机械制造工艺课程中,学生通过UGNX软件进行数控加工仿真,提高了他们的实践能力;在机械创新设计项目和毕业设计中,UGNX软件推动学生进行更深入的研究和创新;在实习实训中,学生通过UGNX软件模拟真实工作场景,提前适应工作环境。
结论中指出UGNX软件对学生的学习和职业发展具有积极影响,未来UGNX软件在高校机械专业教学中将继续发展,应用更加广泛。
UGNX软件的应用将进一步推动学生的专业发展,培养更多优秀的机械工程师。
【关键词】UGNX软件,高校机械专业,教学,应用,机械设计,机械制造工艺,创新设计项目,毕业设计,实习实训,学习,职业发展,影响,发展趋势1. 引言1.1 UGNX软件在高校机械专业教学中的应用概述UGNX软件是一款专业的计算机辅助设计软件,广泛应用于机械工程领域。
在高校机械专业教学中,UGNX软件的应用越来越受到重视。
通过在课程中使用UGNX软件,可以帮助学生更好地理解机械设计原理、制造工艺、创新设计项目等相关知识,提高他们的实践能力和综合素质。
UGNX软件不仅在教学过程中起到了重要的辅助作用,同时也为学生提供了一个实践的平台,使他们能够更好地将理论知识应用到实际工程项目中。
通过学习UGNX软件,学生不仅可以提高自身的技能水平,还可以增强对行业的了解和适应能力。
UGNX软件在高校机械专业教学中的应用对学生的学习和职业发展具有积极的促进作用,也为他们未来的发展奠定了良好的基础。
2. 正文2.1 UGNX软件在机械设计课程中的应用UGNX软件是一款功能强大的三维设计软件,在高校机械专业教学中被广泛应用于机械设计课程中。
通过使用UGNX软件,学生可以学习到如何进行三维建模、装配设计、运动仿真等技术,提升他们的设计能力和实践能力。
UG-NX运动仿真应用于机械结构设计UG NX运动仿真应用于机械结构设计作者:李凯1 引言NX是计算机辅助设计、制造和分析软件,即CAD/CAM/CAE集成工程软件系统,具有强大的设计、加工、分析能力。
为汽车、机械、航天、航空、家电、医疗仪器和工模具等工业的生产提供了有力软件工具。
传统机械设计中。
设计者仅仅是做出零件的二维或二维的装配图,无法准确地预测出机构在运行过程中各零件是否干涉、驱动力是否满足、运动部件的行程能否达到要求等细书问题。
设计者对机构在运转中的情况停留在理论计算以及自己对机构的分析评估,在此条件下设计的机构不免会存在各种隐患和漏洞。
制造完成的机构在运行中往往面临各种问题,可能需要对机构某部件再次进行设计或改进,影响了工作效率。
在机械设计过程中引入运动仿真功能可以直接避免上述种种问题。
设计者可对仿真中发现的问题进行相应的处理,同时也能够为用户提供更加直观更有说服力的动画产品演示。
2 NX软件设计压铸机取料机械手下面仅以NX软件设计压铸机取料机械手为例,说明运动仿直模拟分析过程(如图1)。
以设计压铸机取料机械手例(图2)、介绍NX 软件在机构设计中的应用,可实现存模块的无缝连接。
它具有强大的实体建模、曲面造型、工程制图以及装配功能,可以进行运动仿真分析。
图2 压铸机取料机械手2.1 步骤1:实体建模NX具有完善的实体建模功能,可根据零件外形先绘制草图,添加尺寸约束,然后通过拉伸、旋转、扫面、放样、倒角、切分、布尔运算、拔模、抽壳等命令完成行零部件的设计,每个部件录用参数化设计,在装配过程中发现问题后可直接修改零件刚中的尺寸参数。
该机构包括旋转装置、水平移动装置、竖直移动装置,涉及到的运动方式是电机驱动、齿轮齿条传动、皮带轮传动、气缸驱动等,建模的零件包括:机架、电机、气缸、齿轮、齿条、卡爪、直线导轨等70个,绘制完成后放入统一的文件夹内(如图3、4、5)。
图3 建模的一般工具图4 零件建模设计设计完成的部分零件模型2.2 步骤2:零件的虚拟装配NX软件提供了3种装配方法,第一种是自底向上装配。
UGNX软件在高校机械专业教学中的应用作者:王会来源:《新西部下半月》2016年第10期【摘要】本文阐述了UGNX软件的特点,以德州学院机械设计制造及其自动化专业为例,分析了UGNX软件在机械专业理论教学和实践教学中的应用,将UGNX系统有机融入并贯穿于四年的机械本科教学体系之中。
提高了学生综合运用UGNX系统软件的能力,以及利用所学机械专业理论知识解决工程实际问题的能力。
【关键词】 UGNX软件;机械制图;机械设计;应用一、引言我国在2015年政府工作报告中提出实施“中国制造2025”的战略方针,加快了中国从制造大国转向制造强国。
山东省十三五规划提出促进信息技术向制造业各环节渗透,将山东省建成全国重要的先进制造业基地。
2016年,德州市出台的《关于抓大扶强加快工业转型发展的意见》提出了重点培植发展壮大智能装备制造、新能源等6个战略性新兴产业;壮大提升节能环保、空调设备、农业机械、食品制造、石油装备、车船零部件等10个特色优势产业。
可见,从国家到地方经济发展与机械制造相关,制造业在国民经济中占有非常重要的地位。
智能制造日益成为未来制造业发展的重大趋势和核心内容,如何培养适合国家经济发展的智能制造方面的创新性应用型本科机械类人才已成为高校机械类人才培养的重中之重。
UGNX软件是一个由西门子UGSPLM软件开发、集CAD/CAE/CAM于一体的产品生命周期管理软件,是当今最先进的计算机辅助设计、分析和制造软件之一。
德州学院机电工程学院于2014年获批教育部西门子公司产学合作专业综合改革项目,西门子公司授予本院NX软件使用权。
现已在2014级机械本科班学生学完机械制图课程后开设了UGNX软件课程,并在其他年级进行了相应的软件培训,将UGNX系统有机融入并贯穿于四年的机械设计制造及其自动化专业的本科教学体系之中。
二、UGNX软件在机械专业理论教学中的应用1、在机械制图教学中的应用机械制图课程开设在大学一年级上学期,学生还没有开始机械方面的认识实习等实践教学。
摘要: 三维模型虚拟设计是机械设计的必然趋势。
该文简述了三维设计软件UG NX5.0的强大功能,并且结合发动机曲柄连杆机构实现了模型的虚拟设计、虚拟装配及三维动态真。
关键词:虚拟设计;虚拟装配;三维动态仿真Engine Crank and Link Mechanism Motion Animation Based on UGAbstract: Three - dimentional model virtual design is the tendency of mechanic design. The paper simply state its powerful function of UG NX5.0 with three dimentional design soft, and realize model virtual design、virtual assembly and three - dimentional dynamic animation combined with engine crank and link mechanism.Key words: virtual design; virtual assembly; three - dimentional dynamic animation目录序言 (1)第1章基于UG的曲柄连杆机构的运动仿真的简介 (3)1.1 发动机曲柄连杆机构的虚拟设计 (3)1.2 虚拟装配 (4)1.3 运动仿真 (4)第2章曲柄连杆机构的拆装和零件的测绘 (6)2.1曲柄连杆机构的拆卸 (6)2.3 零件的测绘 (9)2.3.1 游标卡尺的读数原理和读数方法 (9)2.3.2 直径和孔深尺寸的测量 (10)2.4 测绘零件时的注意事项 (10)第 3章曲柄连杆机构的三维造型 (12)3.1曲柄的绘制过程 (14)3.2连杆的三维造型 (22)3.3 活塞的三维造型 (27)第4章曲柄连杆机构的虚拟装配 (33)4.1 装配综述 (33)4.2 曲柄连杆机构的装配实例 (34)第5章曲柄连杆机构的运动仿真 (38)5.1运动仿真综述 (38)5.2 运动仿真创建实例 (40)参考文献 (46)致谢 (47)曲柄连杆机构运动仿真设计(基于UG)序言虚拟技术是近年来随着计算机辅助设计技术发展起来的一种新型技术。
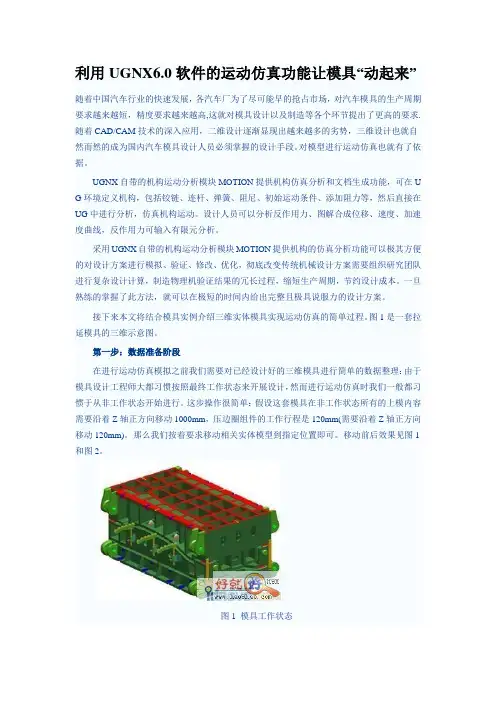
利用UGNX6.0软件的运动仿真功能让模具“动起来”随着中国汽车行业的快速发展,各汽车厂为了尽可能早的抢占市场,对汽车模具的生产周期要求越来越短,精度要求越来越高,这就对模具设计以及制造等各个环节提出了更高的要求.随着CAD/CAM技术的深入应用,二维设计逐渐显现出越来越多的劣势,三维设计也就自然而然的成为国内汽车模具设计人员必须掌握的设计手段。
对模型进行运动仿真也就有了依据。
UGNX自带的机构运动分析模块MOTION提供机构仿真分析和文档生成功能,可在U G环境定义机构,包括铰链、连杆、弹簧、阻尼、初始运动条件、添加阻力等,然后直接在UG中进行分析,仿真机构运动。
设计人员可以分析反作用力、图解合成位移、速度、加速度曲线,反作用力可输入有限元分析。
采用UGNX自带的机构运动分析模块MOTION提供机构的仿真分析功能可以极其方便的对设计方案进行模拟、验证、修改、优化,彻底改变传统机械设计方案需要组织研究团队进行复杂设计计算,制造物理机验证结果的冗长过程,缩短生产周期,节约设计成本。
一旦熟练的掌握了此方法,就可以在极短的时间内给出完整且极具说服力的设计方案。
接下来本文将结合模具实例介绍三维实体模具实现运动仿真的简单过程。
图1是一套拉延模具的三维示意图。
第一步:数据准备阶段在进行运动仿真模拟之前我们需要对已经设计好的三维模具进行简单的数据整理:由于模具设计工程师大都习惯按照最终工作状态来开展设计,然而进行运动仿真时我们一般都习惯于从非工作状态开始进行。
这步操作很简单:假设这套模具在非工作状态所有的上模内容需要沿着Z轴正方向移动1000mm,压边圈组件的工作行程是120mm(需要沿着Z轴正方向移动120mm)。
那么我们按着要求移动相关实体模型到指定位置即可。
移动前后效果见图1和图2。
图1 模具工作状态图2 模具非工作状态(打开状态)第二步:进入运动仿真模块数据准备完成以后我们首先要进入运动仿真模块才能进行相关操作。
UG NX软件在技工院校机械专业教学中的应用王传魁(山东化工技师学院 山东 滕州 277500)摘 要:近年来三维软件在各行业的应用越来越广泛,技工院校陆续也将三维软件引用到教学工作中。
以UG NX 软件为例,如果将软件中的CAD、CAM等模块引入到机械专业的教学中,可以调动学生学习的积极性,极大的提高教学质量。
本文主要介绍UG NX软件在机械制图、机械基础、数控编程、3D打印等机械专业课程中的应用。
关键词: UG;技工院校;机械专业一、软件介绍UG NX软件作为三维设计软件的代表,它集CAD、CAM、CAE于一体,包含四个主要功能模块:基础模块、CAD模块、CAM制造模块和CAE模块[1,2]。
为了适用当今企事业单位对高技术应用型人才的需求,三维设计软件也以成为技工院校机械相关专业学生需要掌握的一种软件。
技工院校机械专业的课程多数理论性、专业性较强,传统的教学模式相对单一,学生很难理解且兴趣较低。
如果将UG NX软件应用到机械相关专业,可以将枯燥的理论知识以三维模型或动画演示的方式展示给学生,让学生借助三维设计软件加深机械相关专业知识的理解和掌握。
二、UG NX软件在机械制图课程中的应用机械制图是技工院校机械专业学生的必修课程。
机械制图对学生的空间想象能力要求较高,通常情况下,学生无法想象出零件的结构特征和投影关系,渐渐就失去学习的兴趣。
相比于传统二维CAD或手工绘图来说,如果借助UG NX软件,可以将所需零部件以三维模型的形式直观的表现出来,不需要花费过多的时间,学生就可以很好的想象出部件的结构形状。
三维模型相比于二维图更有利于学生理解零部件的结构特征,动态的三维模型展示有利于激发学生的学习兴趣。
如果将CAD模块中的建模和制图模块引入机械制图课程中,教师可以运用这些功能迅速地进行建模,设计出三维模型用于机械制图的教学工作[3]。
借助制图模块能够很方便将三维实体模型转化为二维工程图。
如图1所示,以形体分析法绘制三视图为例,学生可以结合三维模型建模过程观察三视图的变换,再结合放大、缩小、旋转等功能,让学生可以从多个角度观看和了解模型结构,理解投影关系。
0引言在车削加工中常有偏心孔或者偏心凸台需要车床精加工,由于工件本身偏心或者定位压紧结构质心不在回转中心,势必由于偏心组件(压紧组件和工件)的离心力和动不平衡的力矩对车床带来很大震动,导致加工精度降低,严重者甚至夹具解体。
因此夹具设计过程中常采用增加配重来实现配平,满足加工精度要求。
1研究现状在普通机械加工行业,偏心车夹具的平衡技术一般采用常采用两种方式,在配平设计时采用对单个偏心组件分割后对夹具的质心位置进行粗略估算,做简单的静平衡估算设计。
其二是现场调试用标准配重块进行增减数量来实现粗略静平衡。
二者皆需要操作者反复多次的观察和试加工才能达到满足要求的平衡状态,配平效率非常低。
随着三维软件的普及,对偏心车夹具的平衡研究开始取得了长足的进步,在PRO/E,CATIA等平台都根据各自的加工需求对配平计算开展相应的计算研究,甚至还有针对三维软件二次开发的复杂分层计算工具。
未来偏心夹具的动平衡计算一定会朝着更加精细,适应性更广泛,更加智能化的方向发展,满足日益严苛的加工需求。
2一般偏心配重计算和运动仿真2.1建立夹具三维模型查询相关信息图1中1是根据实际加工零件相关信息简化的模型,模型中位于夹具中心的孔为所要车削加工的孔;2为压紧组件简化模型(压板、螺柱和螺母);3是车夹具花盘模型;4是用于平衡偏心惯性力和力矩的配重。
在此套夹具中无需考虑变形等问题,可以认为夹具整体是刚体。
故此根据文献[4]刚体转子动平衡条件:各偏心质量产生的惯性力矢量和为零,以及这些惯性力对任意一点的力矩和为零。
惯性力是指车夹具运转中,被加工零件,螺栓压板等机构(以下简称偏心组件)产生的离心力,而离心力F=mω2r⭢,其中m是质量,ω是旋转的角速度,r⭢是质心距旋转中基于NX运动仿真的偏心车夹具动平衡设计陈小军(航空工业金城南京机电液压工程研究中心,江苏南京211106)摘要:以UG/NX10软件为设计研究平台,针对工作中常见偏心车夹具因不平衡导致的震动和加工精度不达要求的问题,通过NX实际建模查询相关偏心信息,满足设计要求的合理配重。
基于UG软件的四连杆运动仿真分析UG软件是一款常用的CAD(计算机辅助设计)软件,它能够帮助工程师进行各种模型的建立、装配和分析。
在机械领域,UG软件被广泛应用于各类机械零部件的设计和仿真。
本文将就UG软件的四连杆运动仿真分析进行探讨,并详细介绍其原理、步骤及应用场景。
一、四连杆的基本概念四连杆是一种机械传动机构,由四条杆件和四个旋转副构成。
其中两条较长的杆件在一端旋转固定,称为地杆,另外两条较短的杆件同样旋转固定,称为摇杆。
四连杆的动作主要靠摇杆的运动驱动,使机械系统完成各种工作。
四连杆的工作原理强调套路重复的动作,即摇杆先向一个方向运动,然后再向另一个方向运动,执行往复的动作。
二、四连杆的运动仿真分析原理在使用UG软件进行四连杆运动仿真分析之前,我们需要了解一些基本原理。
首先,我们需要清楚地知道四连杆的各个参数,包括地杆长度、摇杆长度、连杆长度和摇杆旋转轴的位置等。
其次,我们还需要明确四连杆运动的动力学方程,即四个杆件的位置和速度之间的关系。
最后,我们需要掌握运动分析的方法,以便根据四连杆的参数和动力学方程,计算出各个杆件的位置和速度。
三、四连杆运动仿真分析的步骤1. 创建机械结构模型我们首先需要在UG软件中创建四连杆的机械结构模型,包括四连杆的杆件和旋转副等。
在创建过程中,需要设置结构的初始参数,如地杆长度、摇杆长度、连杆长度、摇杆旋转轴的位置等。
此外,还需要定义四连杆的运动路径和工作条件。
2. 定义杆件约束与运动学关系在创建四连杆的模型后,需要对杆件进行约束和位移关系的定义。
我们需要选择恰当的杆件,对其进行约束设置,确定其运动的自由度,以达到正确的运动效果。
同时,还需要定义杆件之间的运动学关系,解决各个杆件之间的相互作用问题。
3. 进行四连杆运动仿真完成约束和位移关系的设置后,我们就可以开始进行四连杆运动仿真。
在进行仿真前,我们需要确定仿真方案和仿真参数,如仿真时间、仿真速度和仿真环境等。
UGNX软件在高校机械专业教学中的应用【摘要】UGNX软件在高校机械专业教学中的应用已经逐渐成为教育教学的重要工具。
本文从基础应用、设计与制造、仿真与优化、毕业设计与论文撰写、实习与实践环节等方面论述了UGNX软件在高校机械专业课程中的多样化应用。
通过引入UGNX软件,学生可以更好地理解机械原理、提升设计和制造技能、开展仿真优化研究、完成毕业设计和论文撰写,并在实习和实践中获得更加丰富的经验。
文章分析了UGNX软件在机械专业教学中的效果与展望,探讨了面临的挑战和未来的发展方向。
UGNX软件的广泛应用将为培养高素质机械专业人才、推动机械制造技术进步提供更多可能性,有望推动高校机械专业教学向更加深入、广泛、专业的方向发展。
【关键词】关键词:UGNX软件、高校、机械专业、教学应用、基础应用、设计与制造、仿真与优化、毕业设计、论文撰写、实习与实践、效果、展望、挑战、发展方向1. 引言1.1 UGNX软件在高校机械专业教学中的应用UGNX软件在高校机械专业教学中的应用是当前机械专业教学中的重要组成部分之一。
随着信息技术的不断发展和普及,UGNX软件在高校机械专业教学中的应用也逐渐走进了课堂。
UGNX软件是一种专业的CAD/CAM/CAE一体化软件,具有强大的功能和广泛的应用领域。
在高校机械专业教学中,UGNX软件被广泛应用于教学实践、课程设计、毕业设计等方面。
通过UGNX软件,学生可以直观地理解机械原理和设计思路,提高实践操作能力和解决问题的能力。
在机械专业课程中,UGNX软件的基础应用能够帮助学生快速掌握CAD软件的基本操作技能,提高设计效率和准确性。
在机械设计与制造课程中,UGNX软件能够帮助学生进行三维建模、装配设计和工程图表绘制,实现从设计到制造的全流程闭环。
UGNX软件在高校机械仿真与优化课程中的应用,能够帮助学生进行结构强度、动力学、流体分析等方面的仿真,提高设计方案的精度和效率。
在毕业设计与论文撰写中,UGNX软件为学生提供了丰富的设计工具和数据支撑,帮助他们完成高质量的毕业设计和论文撰写。
UG-NX运动仿真应用于机械结构设计
UG NX运动仿真应用于机械结构设计
作者:李凯
1 引言
NX是计算机辅助设计、制造和分析软件,即CAD/CAM/CAE集成工程软件系统,具有强大的设计、加工、分析能力。
为汽车、机械、航天、航空、家电、医疗仪器和工模具等工业的生产提供了有力软件工具。
传统机械设计中。
设计者仅仅是做出零件的二维或二维的装配图,无法准确地预测出机构在运行过程中各零件是否干涉、驱动力是否满足、运动部件的行程能否达到要求等细书问题。
设计者对机构在运转中的情况停留在理论计算以及自己对机构的分析评估,在此条件下设计的机构不免会存在各种隐患和漏洞。
制造完成的机构在运行中往往面临各种问题,可能需要对机构某部件再次进行设计或改进,影响了工作效率。
在机械设计过程中引入运动仿真功能可以直接避免上述种种问题。
设计者可对仿真中发现的问题进行相应的处理,同时也能够为用户提供更加直观更有说服力的动画产品演示。
2 NX软件设计压铸机取料机械手
下面仅以NX软件设计压铸机取料机械手为例,说明运动仿直模拟分析过程(如图1)。
以设计压铸机取料机械手例(图2)、介绍NX 软件在机构设计中的应用,可实现存模块的无缝连接。
它具有强大的实体建模、曲面造型、工程制图以及装配功能,可以进行运动仿真分
析。
图2 压铸机取料机械手
2.1 步骤1:实体建模
NX具有完善的实体建模功能,可根据零件外形先绘制草图,添加尺寸约束,然后通过拉伸、旋转、扫面、放样、倒角、切分、布尔运算、拔模、抽壳等命令完成行零部件的设计,每个部件录用参数化设计,在装配过程中发现问题后可直接修改零件刚中的尺寸参数。
该机构包括旋转装置、水平移动装置、竖直移动装置,涉及到的运动方式是电机驱动、齿轮齿条传动、皮带轮传动、气缸驱动等,建模的零件包括:机架、电机、气缸、齿轮、齿条、
卡爪、直线导轨等70个,绘制完成后放入统一的文件夹内(如图3、4、5)。
图3 建模的一般工具
图4 零件建模设计
设计完成的部分零件模型
2.2 步骤2:零件的虚拟装配
NX软件提供了3种装配方法,第一种是自底向上装配。
就是先创建部件几何模型,再组合成子装配,最后生成装配部件的装配方法,这是最常用的一种方法(如图6);第二种是自顶向下装配。
直接在装配层建立零件模型,然后边装配边建立其他部件模型,也就是在装配文件中创建模型。
第三种是混合装配。
即根据装配设计的需要,进行自底向上装配和自顶向下装配混合使用的装配方法。
本文所涉及的机构采用混合装配方式,装配完成后为每个部件着色。
图6 装配完成
2.3 步骤3:机构运动仿真
了解了机构运动的原理及需要设定的运动副情况后,可以进行运动仿真。
在NX主界而中选捧菜单开始/运动仿真,即可进入NX“运动仿真”主界面。
新建一个运动学仿真,并在弹出的“主模型到仿真的配对条件转换”对话框中选择“否”。
步骤:
(1)创建连杆,即相对运动部件集合,本例中根据各部件相互运动方式需建立7个连杆,包括固定机架部分、水平横移部分,竖直运动部分、机械手水平旋转部分、机械手竖直旋转部分、卡爪开闭部分。
(2)在零件的外观模理建立好以后,需要对模型的材料特性进行加载,包括材料力学特性、弹性模量、泊松比、密度等(如图7)
(3)根据机构动作设定运动副,本例中用到的运动副包括滑动副、旋转副、齿轮副、齿轮齿条副。
(4)定位每个运动副的时间函数,在一个周期内完成所有的运动。
2.4 步骤4:添加机构载荷
向机构添加一定的外载荷,使整个机构工作在真实的工程状态下,尽可能地使其运动状态与真实的情况相吻合。
一个被应用的力设置在机构的两连杆之间、运动副上或者是连轩与机架之间,可以被用来模拟两个零件之间的弹性连接,模拟弹簧和阻尼的状态,以及传动力与原动力等多种零件之间的相互作用(如图8)。