激光打标机结构设计及运动仿真
- 格式:doc
- 大小:221.00 KB
- 文档页数:15
毕业设计(论文)选题___激光打标工艺_________ ______________系别_信息工程系_ 班级_10电子信息工程技术1班学生姓名***___________ 学号__20101483___________ 指导教师____***________________________完成日期2012 年11 月12 日摘要激光打标是用激光束在各种不同的物质表面打上永久的标记。
打标的效应是通过表层物质的蒸发露出深层物质,或者是通过光能导致表层物质的化学物理变化而"刻"出痕迹,或者是通过光能烧掉部分物质,显出所需刻蚀的图案、文字。
关键词:歌尔激光打标工艺激光打标机使用目录内容提要 (I)摘要 (II)第一章绪论引言 (1)歌尔有限公司以及产品简介 (1)第二章本论2.1激光打标机工作原理以及其优点 (2)2.2 激光打标机种类及其各种类型比较 (5)2.3 激光打标机使用、保养、维修以及故障排除方法 (7)2.4 激光打标机对人体危害以及防护方法 (14)总结 (14)致谢 (2)参考文献 (3)附录 (4)第一章绪论1.1引言激光的原理早在1916 年被著名的美国物理学家爱因斯坦发现,但直到1960 年激光才被首次成功制造。
激光是在有理论准备和生产实践迫切需要的背景下应运而生的,它一问世,就获得了异乎寻常的飞快发展,激光的发展不仅使古老的光学科学和光学技术获得了新生,而且导致整个一门新兴产业的出现。
激光可使人们有效地利用前所未有的先进方法和手段,去获得空前的效益和成果,从而促进了生产力的发展。
1.2歌尔有限公司以及产品简介:歌尔声学自创立以来,始终专注于电声行业微型电声元器件和消费类电声产品的研发和制造,主要产品包括微型麦克风、微型扬声器/受话器、蓝牙系列产品和便携式音频产品,广泛应用在移动通讯设备及其周边产品、笔记本电脑、个人数码产品和汽车电子等领域。
公司赢得了包括三星、惠普、思科、LG、松下、西门子、NEC、富士康、伟创力、宏碁、华硕、联想、京瓷、中兴通讯、缤特力、哈曼、罗技等在内的优质客户资源,在电声行业取得了歌尔声学股份有限公司有利的竞争地位。
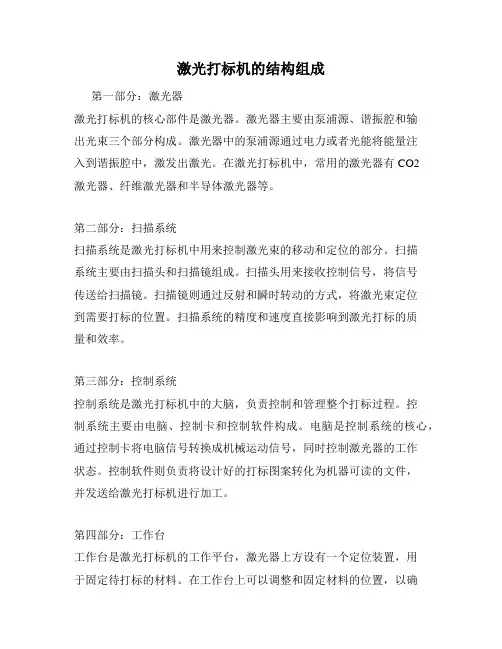
激光打标机的结构组成第一部分:激光器激光打标机的核心部件是激光器。
激光器主要由泵浦源、谐振腔和输出光束三个部分构成。
激光器中的泵浦源通过电力或者光能将能量注入到谐振腔中,激发出激光。
在激光打标机中,常用的激光器有CO2激光器、纤维激光器和半导体激光器等。
第二部分:扫描系统扫描系统是激光打标机中用来控制激光束的移动和定位的部分。
扫描系统主要由扫描头和扫描镜组成。
扫描头用来接收控制信号,将信号传送给扫描镜。
扫描镜则通过反射和瞬时转动的方式,将激光束定位到需要打标的位置。
扫描系统的精度和速度直接影响到激光打标的质量和效率。
第三部分:控制系统控制系统是激光打标机中的大脑,负责控制和管理整个打标过程。
控制系统主要由电脑、控制卡和控制软件构成。
电脑是控制系统的核心,通过控制卡将电脑信号转换成机械运动信号,同时控制激光器的工作状态。
控制软件则负责将设计好的打标图案转化为机器可读的文件,并发送给激光打标机进行加工。
第四部分:工作台工作台是激光打标机的工作平台,激光器上方设有一个定位装置,用于固定待打标的材料。
在工作台上可以调整和固定材料的位置,以确保激光打标的准确性和一致性。
总结:激光打标机的结构组成包括激光器、扫描系统、控制系统和工作台。
激光器作为核心部件,产生高能激光束。
扫描系统通过扫描头和扫描镜控制激光束的移动和定位。
控制系统则负责整个打标过程的控制和管理。
工作台是激光打标机的工作平台,用于固定待打标的材料。
以上各部件的协同工作,实现了高效、准确的激光打标加工。

烟台飞扬激光光纤激光打标机使用说明书目录第一章:简介第二章:设备操作安全防护第三章:设备技术参数与适用环境3.1设备技术参数3.2设备适用环境第四章:激光标记原理介绍4.1激光理论概述4.2激光器简介4.3激光标记机简介第五章:设备系统说明第六章:设备安装及调试6.1设备的安装及定位要求.6.2开箱及检查6.3设备安装第七章:维护及保养7.1维护时注意事项7.2常见故障及排除方法第一章概述1.1 激光标记机理激光具有高亮度、高方向性、高单色性和高相干性,是普通照明光源所无法比拟的。
激光束通过聚焦后,在焦点处可产生数千度乃至上万度的高温,使其可能加工几乎所有的材料。
激光打标是用激光束在各种不同的物质表面刻上永久性的标记。
打标的效应是通过表层物质的蒸发露出深层物质,或者是通过光能作用导致表层物质的化学物理变化而“刻”出痕迹,显示出所需刻蚀的图形、文字。
1.2 激光标记特点1)可对多种金属、非金属材料进行加工,尤其对高硬度、高熔点、脆性材料进行标记更显优势。
2)属于非接触加工、不损坏产品,无刀具磨损,标记质量好。
3)激光束细,加工材料消耗很小,加工热影响区小。
4)加工效率高,采用计算机控制,易于实现自动化。
1.3产品概述FYPL10/20W光纤激光打标机是集激光、计算机、自动控制、精密机械技术为一体的高科技产品。
该打标机采用高性能进口数字振镜扫描系统方式,速度快、精度高、能长时间工作。
能在大多数金属材料及部分非金属材料如:硅、橡胶、环氧、陶瓷、大理石等材料进行刻写或制作难以仿制的永久性防伪标记。
FYPL10/20W光纤激光打标机激光光学模式好(M2 < 2),设备体积小,工作稳定可靠,免维护,无需水冷系统,设备电光转换效率高,能耗低;标记质量好;激光功率和频率计算机控制,易于实现标记自动化。
烟台飞扬激光提供基于Windows平台下的专用打标软件。
能对激光功率和脉冲频率实行实时控制。
标记内容可以是文字、图形、图片、序列号、条形码及其组合,并且可以在专用打标软件中直接输入、编辑,也可由AutoCAD或CorelDRAW等图形软件下编辑,通过计算机控制输入与输出。

Internal Combustion Engine &Parts0引言随着计算机仿真技术的高速发展和应用,采用虚拟样机技术中的模拟仿真手段,验证关键零部件结构设计的合理性和产品性能,已成为一种较为普遍的现代机械设计方法。
通过构建三维虚拟模型,采用有限元方法快速地分析机械零部件的结构合理性和疲劳强度,分析振动、热响应对整机工作性能的影响,实现机械产品的最优化设计,从而大大缩短了机械产品的研发周期和成本。
激光打标作为激光加工技术中的一种重要应用技术,与传统的喷码技术相比,除了打标图案防伪性能极好外,还具有环保、打标质量高、速度快、成本低等显著特点。
项目组研发的全自动封装芯片激光打标机,采用激光进行集成电路的表面字符刻制,属于一种全新的图形字符标识方式。
本文针对全自动激光打标机中的关键零部件———机械手移动支架开展研究,利用Solid Works 软件的Simulation 模块对其进行静态强度分析,验证支架结构设计的合理性和可靠性。
为防止移动支架在芯片输送过程中产生振动,对该支架进行有限元模态分析,找出其共振频率并在设计中有效避免该频率的出现,保证移动支架工作过程中的稳定性。
1移动支架静应力分析在现代机械设计方法中,为缩短机械产品的研发周期,通常使用仿真软件对所设计产品的关键零部件或机构进行运动仿真、有限元分析和优化设计,在完成一系列模拟真实环境的计算后,制造物理样机进行产品的最终验证。
全自动激光打标机中的移动支架,属于物料抓取机构中固定横梁和物料抓取机械手的连接部件,该部件机械使用性能的好坏对于物料抓取机构乃至激光打标机整机运行的可靠性举足轻重的作用。
为便于项目团队对于该款全自动激光打标机整机虚拟样机的研究,本次研究通过使用Solid Works 软件的Simulation 模块,对移动支架部件进行静应力计算,分析设备正常运行时移动支架的静强度和可靠性是否满足设计与工作要求。
在Solid Works 软件中进行全自动激光打标机移动支架的静态应力分析,首先,进入软件的办公室产品界面选择“Simulation ”菜单,在算例顾问的下拉菜单中选择“新建”,类型选择静态,建立移动支架的静态分析算例;其次,对移动支架的有限元计算参数进行设置,具体过程如下:①定义材料属性,根据设计要求选择移动支架材料为AISI1020钢,设置材料属性:密度ρ=7900kg/m 3,弹性模量E=200GPa ,泊松比μ=0.29,屈服强度为σs =352MPa 。
智能激光打标机设计方案智能激光打标机设计方案智能激光打标机是一种集成了先进激光技术和智能掌控系统的高精度打标设备。
其重要功能是将激光束聚焦后照射到物体表面,通过掌控激光束的位置和强度,实现对物体进行刻印、打标等操作。
智能激光打标机广泛应用于电子、通信、汽车、医疗器械等行业,成为现代工业生产中的工具。
一、设计原理智能激光打标机的设计原理基于激光束的聚焦和掌控技术。
通过采纳高功率激光器发射激光束,并利用聚焦透镜将其聚焦到微小的点,然后掌控激光束的移动路径和强度,实现对物体表面的打标。
打标过程中,激光束的热能将物体表面的料子蒸发、氧化或烧蚀,从而形成可见的标记。
二、重要构成部分智能激光打标机的重要构成部分包含激光器、扫描镜组、光学系统、掌控系统等。
1.激光器:采纳高功率、高稳定性的激光器作为激光源,如固体激光器、半导体激光器等,以保证激光束的质量和稳定性。
2.扫描镜组:包含两个扫描镜和一个扫描镜驱动系统。
扫描镜通过快速转动来更改激光束的入射角度和方向,从而实现激光束的移动和掌控。
3.光学系统:由透镜、聚焦镜、反射镜等构成,用于对激光束进行聚焦和调整,以保证激光束的质量和聚焦点的精度。
4.掌控系统:包含硬件和软件两部分。
硬件掌控系统重要包含激光器的掌控、扫描镜的掌控、光学系统的掌控等;软件掌控系统重要包含标记内容的设计和编辑、标记参数的设置等。
三、设计特点智能激光打标机相比传统的打标设备具有以下几个特点:1.高精度:激光束的聚焦和掌控技术使得打标精度可实现微米级别,适用于对精细物体进行打标。
2.高效率:激光打标过程无需接触物体表面,工作速度快,适用于高速生产线上的自动化操作。
3.高牢靠性:采纳高稳定性的激光器和精密掌控系统,设备寿命长,故障率低。
4.快捷性强:可依据实际需求选择不同功率、不同波长的激光器,并通过软件掌控系统实现不同标记内容和参数的调整。
四、应用领域智能激光打标机广泛应用于电子、通信、汽车、医疗器械、医药包装等行业。

激光焊接机的优化设计与运动仿真作者:杨业福来源:《今日自动化》2022年第07期[摘要]目前,激光焊接机广泛应用,其中应用了各类技术。
在激光焊接机结构方案的设计过程中,充分应用了激光密封焊接技术。
除此以外,为了不断提高激光焊接机的应用效率,在设计的过程中还需要应用到模组,便于对电池壳各个部位进行一次性的焊接。
另外,焊接机还需要进行运动仿真相关的分析,这个过程中需要高效利用UG,对整机进行高效的分析。
在具体的优化设计过程中,还需要利用专门的高效软件,尤其注意对立柱和横梁的设计。
优化设计和运动仿真的过程,可以不断提高电池的焊接质量和基本的效率。
[关键词]激光焊接机;优化设计;运动仿真;过程分析;技术应用[中图分类号]TG439.4 [文献标志码]A [文章编号]2095–6487(2022)07–00–03Talking about the Optimization Design and Motion Simulation of Laser Welding MachineYang Ye-fu[Abstract]Laser welding machines have been put into a wide range of applications at present, in which various technologies are applied. In the design process of the structural scheme of the laser welding machine, the laser sealing welding technology is fully applied. In addition, in order to continuously improve the application efficiency of the laser welding machine, it is also necessary toapply the module in the design process to facilitate one-time welding of each part of the battery shell. In addition, the welding machine also needs to perform motion simulation-related analysis. In this process, it is necessary to use UG efficiently to analyze the whole machine efficiently. In the specific optimization design process, it is also necessary to use special high-efficiency software,especially the design of columns and beams. The process of optimizing design and motion simulation can continuously improve the welding quality and basic efficiency of the battery.[Keywords]laser welding machine; optimization design; motion simulation; process analysis; technical application1 電动汽车和动力电池简介1.1 电动汽车基本介绍在当下,我国的经济社会飞速发展,在各类新型交通工具广泛使用的同时,也对周边的生态环境造成了较大的负担,同时也会消耗大量的能源,造成能源资源紧张的问题。

本科毕业设计论文题目激光武器光电跟踪瞄准系统的设计与仿真专业名称学生姓名指导教师毕业时间2014年6月西北工业大学明德学院本科毕业设计论文毕业 任务书一、题目光电跟踪瞄准控制系统的分析与设计二、指导思想和目的要求1.利用已有的专业知识,培养学生解决实际工程问题的能力;2.锻炼学生的科研工作能力和培养学生的攻关能力;三、主要技术指标1.详细分析光电跟踪瞄准控制系统组成和机理;2.设计光电跟踪瞄准控制系统;3.对所设计的光电跟踪瞄准控制系统进行仿真验证及分析;四、进度和要求第01周----第02周: 英文翻译;第03周----第05周: 光电跟踪瞄准控制系统机理研究;第06周----第07周: 熟悉Matlab/Simulink 等相关软件;第08周----第13周: 设计光电跟踪瞄准控制系统;第14周----第16周: 建立控制系统仿真模型进行验证分析;第17周----第18周: 撰写毕业设计论文,论文答辩;五、主要参考书及参考资料1.张秉华,张守辉.光电成像跟踪系统[M].成都:电子科技大学出版社.2.刘廷霞.光电跟踪系统复合轴伺服控制技术的研究[D](博士学位论文),中国科学院长春光学精密机械与物理研究所.3.王建立.光电经纬仪电视跟踪捕获快速运动目标技术的研究[D](博士学位论文),中国科学院长春光学精密机械与物理研究所.4.冯艳平.星间光通信ATP 跟踪控制环路研究及FPGA 实现[D](硕士学位论文),电子科技大学.学生 指导教师 系主任设计论文摘要近年来,随着精确制导武器技术的不断发展和作战样式的改变,以美国为首的西方发达国家纷纷把发展精确制导武器的重点转向了防区外中远程精确打击武器之上。
发展“高能激光武器系统”可有效对抗中远程精确打击武器这一新的作战目标。
本文重点在于激光武器装备中,精密捕获、跟踪、瞄准系统的分析与设计。
它与一般光电测量系统的区别在于,它不仅要求将运动目标稳定跟踪在规定视场内,而且要求将光束锁定在目标某一点上。

光纤激光打标机系统的结构及特点光纤激光打标机系统的基本结构如图所示。
光纤激光打标机的系统结构光纤激光器是在光纤放大器的基础上而发展起来的。
光纤放大器是利用了掺杂稀土元素的光纤,再加上一个恰当的反馈机制便形成了光纤激光器。
掺杂稀土元素的光纤就充当了光纤激光器的增益介质。
在光纤激光器中有一根非常细光纤纤芯,由于外泵浦光的作用,在光纤内便很容易形成高功率密度,从而引起激光工作物质能级的粒子数反转。
采用光纤光栅作为光纤激光器的谐振腔,用特殊工艺制成的树杈型包层光纤,多模泵浦光就从光纤岔口导入,对树杈型光纤内的一条细小的掺杂稀土元素(例如镱)的单模光纤纤芯泵浦。
当泵浦光每次横穿过单模光纤纤芯时,将稀土元素的原子泵浦到上能级,然后通过跃迁产生自发辐射光,通过在光纤内设置的光纤光栅的选频作用,特定波长的自发辐射光被振荡放大而最后产生激光输出。
若在包层光纤材料中掺杂不同的稀土元素,例如掺杂铒、铥、镨、镱等不同的稀土元素即会使得光纤激光器有多种不同的激光波长输出。
利用包层、并行泵浦技术,将多个激光二极管同时耦合至包层光纤上,就可以获得较高功率的激光输出。
其基本原理如下图所示。
光纤光栅作为谐振腔,可脉冲和连续运转。
新型光纤激光器具有单模输出,散热特性好,效率高,结构紧凑等特点,特别适合高精度的激光标刻。
典型的20-80KHz高重复工作频率,10W激光功率输出的光纤激光器成品的体积仅有22 cm X25 cm X10cm,而且只需风冷。
因为激光二极管是低电压工作,光纤激光器的电光效率高达70%,整机功率仅200W。
光纤激光打标机的性能特点:1.光束质量好,接近TEM00基模输出,M2≤1.2。
2.脉冲重复频率高(20-80KHz),输出功率稳定,单脉冲能量波动小于1%,从而可实现高速激光标刻,,满足精细打标要求。
3.高效率,电光转换效率可达70%。
4. 风冷全免维护系统,无耗材。
体积小,可靠性高,长时间运行免维修,节约使用成本。

第一章激光器原理可以肯定地说:本世纪最后的伟大发明之一是激光技术。
它自一九五八年问世以来,已经逐步地然而是坚定地渗透到了科研、军事、工业等各个领域。
不是吗?看看我们的周围,你就可以轻易地找到它应用的实例:医院中的激光诊断及激光治疗机、商店中的条码识别器、办公室中的激光打印机、把我们与世界各地联结在一起的光纤等等, 就是在我们的家中也有它的身影:激光唱机、激光影碟机。
人类发明了多种多样的激光器。
诸如:气体激光器 (He-Ne 激光器、 CO 2激光器等、固态晶体激光器(红宝石激光器、钕玻璃激光器等、离子激光器(氪离子激光器、氩离子激光器等、染料激光器(甲酚紫激光器、萤光素激光器等、超辐射激光器(氮分子激光器等以及半导体激光器(砷化镓半导体二极管等等等。
在世界的许多地方,几乎所有的商品激光器都在制造业中得到越来越广泛的应用。
CO 2激光器的主要用途就是各类工业激光加工设备,作为固态晶体激光器的Nd: YAG(掺钕钇铝石榴石激光器的最大应用便是在激光打标领域。
1.1 激光原理我们知道,物质是由原子组成的,而原子是由带正电的原子核和带负电的核外电子组成的(见图 1.1 。
每一个电子都沿着自己特定的轨道绕原子核高速旋转,其旋转半径决定于电子所处的能级。
原子吸收能量后,电子的旋转半径会增加,电子的能级就会提高;原子释放能量后,电子的旋转半径会减小,电子的能级就会降低。
每个能级对应着一个特定的能量。
电子所具有的能量是不连续的,也就是说原子的能级是量子化的。
原子只有吸收了两个能级之间差值的能量才会提高一个能级,电子在能级之间的变动现象称为跃迁。
同样,当原子跃迁到较低能级时,会释放出两个能级之间差值的能量。
原子的最低能级为 E0,高的能级依次为 E1、 E2、 E3、… … ,高的能级称为上能级,低的能级为下能级。
处在能级 E0的原子称为基态原子,其它能级称为激发态(见图 1.2 。
原子可以吸收光子来获得能量,当然这个光子必须具有与原子能级差相1等的能量(例如:E1-E0原子只能吸收带有几个能量的光子。
紫外激光打标机结构
紫外激光打标机是一种利用紫外激光进行标记的设备。
它主
要由以下几个部分组成:
1.激光发生器:紫外激光打标机使用紫外激光源作为光源,
常见的激光发生器包括固态激光器。
这些激光器能够产生高能量、高频率的紫外激光,用于实现高精度的标记。
2.光学系统:光学系统将激光束聚焦到工件表面,以实现高
精度的标记。
光学系统通常包括凸透镜、凹透镜、反射镜等光
学元件。
这些元件能够调节和聚焦激光束,从而实现不同形状、大小和深度的标记效果。
3.控制系统:控制系统是紫外激光打标机的核心部分,它负
责控制激光的开关、调节激光的功率和频率以及控制激光束的
路径。
控制系统通常由电子控制器和运动控制器组成。
电子控
制器负责激光的开关和功率调节,运动控制器负责控制激光束
在三维空间中的移动,从而实现各种形状和位置的标记。
4.工作台:工作台是紫外激光打标机的工作平台,用于固定
和定位待标记的工件。
工作台通常由平台和夹具组成,能够稳
定地固定工件,并确保它们在标记过程中的位置不变。
5.控制界面:控制界面是用户与紫外激光打标机进行交互的
界面。
它通常由触摸屏、按钮和显示器组成,用户可以通过它
设置标记参数、启动标记过程以及监控标记进度。
总之,紫外激光打标机的结构主要包括激光发生器、光学系统、控制系统、工作台和控制界面。
这些部分的协调工作,使得紫外激光打标机能够实现高精度、高效率的标记。
通过调整和控制各个部分的参数,用户可以根据需要进行不同形状、大小和深度的标记。
实验四、激光打标实验随着激光应用技术的发展,激光已经成为规范的打标工具,它可以在塑料、硅片、金属、陶瓷等许多种材料上标识出标记。
用计算机控制激光打标系统,可以快速高质量地打出序列编号、徽标、商标、装饰设计图案等。
激光打标技术具有一系列优异特点:激光打标不直接接触工件表面,无烟,无沾污,无其它损伤,且可形成永久性标记;容易与计算机连接,可以实现快速控制和精确定位,实时改变设计方案,并能方便地在工件上标记出各种复杂图形;利用激光与材料之间相互作用的物理和化学机理,可以实现刻蚀、凸雕、变色和涂层去除等功能;选择不同的激光波长和填料,可以获得各种复杂的彩色标记;对于粘附困难且不适于油墨打标的塑料、金属材料等,激光打标均可以解决;激光光束可以聚焦到微米量级,激光能量可以精确控制,故可以实现微型打标技术(点标直径几十微米,深度为几微米量级),这是油墨打标方法和其它方法都难以实现的。
一、 实验目的:1、了解激光在工业中的应用—激光打标2、掌握激光打标机的工作原理3、学会用激光打标机制作简单的图形二、 实验原理当强激光入射到材料表面,材料表面对应于光斑大小和吸收长度的区域吸收激光能量,温度迅速升高,形成一局部热源,这一热源按照热传导规律在物体表面和材料内部进行能量传递。
温度分布将取决于材料表面吸收的光功率,物体的热扩散系数和热容量。
如果材料表面和光束是相对运动的,打标结果还与光斑大小及光斑相对于材料表面的运动速度u 有关。
a P k p C 设材料表面的几何尺寸远大于光斑尺寸,可以认为是半无界空间情况,材料中的温度分布与吸收的光功率密度Q 之间的关系有热扩散方程决定:p C Q T k t T =∇−∂∂2 (1) 设坐标面XOY 与材料表面重合,激光束沿Z 轴投射到材料表面的坐标原点处,激光光斑以速度沿0=Z u X 方向运动。
若高斯光束的束腰半径为ω,则运动光斑的功率密度分布为:22224)(exp 2ωπωY ut X P Q a+−−= (2 ) 为求解方程(1),采用Green 函数叠加法,设温度场的坐标为,源的坐标,表面热源的Green 函数为:),,,(t Z Y X ),,,(''''t Z Y X 23'1'2)]([4})](4[exp{),,,(t t k t t k r t Z Y X G −−−=−π (3) 其中,,材料的温度分布一般为:2'2'2'2)()()(Z Z Y Y X X r −+−+−=''''''),,,,,',','(),',','(1dt dZ dY dX t Z Y X t Z Y X G t Z Y X Q C T t p ∫∫∫∫∞−∞−∞−= (4)表面源,材料中的温度分布为:0'=Z 220222222223)4(exp ),,,(ωβββωββπ+−+++−−=∫∞d Z Y k u ut X K P t Z Y X T a (5) 式中21')(2t t −=β。
激光打标机组成部件一、概述激光打标机是一种利用激光束在各种材料上进行标记、刻字、雕刻的设备。
它由多个组成部件组成,每个部件都发挥着重要的作用。
本文将详细介绍激光打标机的各个组成部件及其功能。
二、激光发生器激光发生器是激光打标机中最核心的部件之一。
它通过电力或光能的输入,在激光介质中产生有一定相干性的激光光束。
常见的激光发生器有CO2激光器、光纤激光器、半导体激光器等。
不同类型的激光发生器适用于不同的材料和标记要求。
三、光束传输系统光束传输系统主要由准直镜、聚焦镜和光纤组成。
激光发生器产生的激光光束经过准直镜的调整,再经过聚焦镜的聚焦,最终通过光纤传输到加工头。
该系统的作用是确保激光光束的稳定性和聚焦性,使其能够准确地照射到待加工物体上。
四、加工控制系统加工控制系统是激光打标机的大脑,它由控制器和控制软件组成。
控制器接收用户输入的标记内容,并将其转换为机器可识别的指令。
控制软件则负责生成激光打标的路径,控制激光发生器的开关和功率,实现精确的标记。
五、扫描振镜系统扫描振镜系统用于控制激光束在加工平面上的扫描轨迹。
它由X轴振镜和Y轴振镜组成。
X轴振镜负责控制激光光束在水平方向上的位置变化,Y轴振镜负责控制垂直方向上的位置变化。
通过改变振镜的角度和频率,可以实现不同形状和尺寸的标记。
六、工作台工作台是激光打标机上支撑待加工物体的平台。
它通常由铝合金制成,具有良好的稳定性和耐磨性。
工作台可以在水平方向和垂直方向上调节,以适应不同尺寸和高度的物体。
七、辅助设备辅助设备包括冷却系统、气源系统和排风系统。
冷却系统用于降低激光发生器和光学元件的温度,确保其正常工作。
气源系统提供气体,如氮气、氧气等,用于辅助激光打标过程中的材料剥离、切割等。
排风系统用于排出激光打标过程中产生的烟尘和废气,保证操作环境的清洁和安全。
八、总结激光打标机是一种多组成部件组成的精密设备。
激光发生器、光束传输系统、加工控制系统、扫描振镜系统、工作台和辅助设备共同协作,实现高效、精确的激光打标功能。
CoreXY机构3D打印机运动控制算法研究丁承君;韩承都【摘要】CoreXY机构凭借其结构紧凑、运动敏捷的优势,被广泛应用于激光雕刻机、FDM型3D打印机等智能设备中.以FDM型3D打印机的CoreXY机构为研究对象,结合该机构的自身特性,分析其驱动电机和挤出机构之间的运动关系和特点,详细阐述应用于该机构的主流运动控制算法,分析这些算法的优缺点.目前用于控制平面型CoreXY机构的算法众多,比较常用的有直线插补算法中的逐点比较法、最小偏差法,以及Bresenham算法等.针对这些算法都存在精度不高和效率低下的缺点,为了准确高效的对其运动进行控制,提出一种基于以上算法的改进算法,该算法能很好地提高挤出机构滑块的运动速度和精度.【期刊名称】《制造业自动化》【年(卷),期】2019(041)002【总页数】5页(P81-85)【关键词】CoreXY机构;直线插补;逐点比较法;最小偏差法;FDM型3D打印机【作者】丁承君;韩承都【作者单位】河北工业大学机械工程学院机械工程系,天津300130;河北工业大学机械工程学院机械工程系,天津300130【正文语种】中文【中图分类】TP230 引言近年来3D打印机、激光雕刻机、激光切割机以及激光打标机等智能设备兴起,引发了科技爱好者的兴趣。
CoreXY机构是广泛应用于这些设备中的机构之一,CoreXY结构相对紧凑,同样体积的情况下,可以实现相对较大的打印尺寸;对于CoreXY结构,在XY平面内运动的两个电机都固定,降低了运动部件的重量,这样也就降低了运动部件的惯性,同样驱动力的情况下,加速度更高,带来的效果就是运动更加敏捷。
相对于笛卡尔直角坐标机构、Delta机构[1],CoreXY机构具有明显的优势。
为了更加高效精确的控制它,目前比较流行的是广泛用于数控机床控制的插补算法,常用的插补算法有逐点比较法、最小偏差法、Bresenham直线生成算法(计算机图形学中绘制直线的一种经典算法[2])等。
江西理工大学本科毕业设计(论文)题目:激光雕刻机设计及主要零件工艺设计专题题目:学院:机电工程学院专业:机械工程及自动化班级:机械113班学号:40学生:钱伟伟指导教师:宋小军职称:讲师时间:2015年6月10日摘要激光雕刻的适用对象主要是精密细小和形状复杂的零件,本文设计了一台由PLC控制的激光雕刻机床,主要完成了:(1)雕刻机的基本结构和自由度分析,机床整体结构设计,X、Y轴的结构设计计算、传动轴、直线导轨的选择及其强度分析;对雕刻机的运动速度和控制精度进行分析,激光雕刻机传动方案设计。
几种雕刻机常用的传动机构比较,然后再根据激光雕刻机的具体要求确定各个模块的传动方案。
(2)对常见的传动机构:齿轮传动机构、丝杠螺母传动、链传动机构,齿形带传动机构等进行比较,结合各自的优缺点确定雕刻机的传动机构,包括雕刻机激光器X方向移动方案,Y方向移动方案。
(3)步进电机的选型以及以步进电机为进给驱动的驱动系统及其传动机构的分析设计计算。
(4)对雕刻机的一些主要零件,如垫板、光轴滑块、短轴进行工艺分析与制定,进一步熟悉其加工的具体过程。
(5)了解PLC控制系统的类型及功能,以及PLC机型的选择、对被控对象激光器的运动进行分析,明确激光器的移动要求,制定电气控制系统方案。
总结:本文设计的激光雕刻机可以对木材,纸张,钢材等材料进行精密雕刻,大大缩短了雕刻时间,提高了生产效率,因而数控激光切割在我国制造业中正发挥出巨大的优越性。
关键词:PLC;激光雕刻机;结构设计;工艺设计;ABSTRACTSuitable for laser engraving are mainly small and precision parts of complex shape, we design a laser engraving machine controlled by a PLC completed a major:(1),The basic structure of the engraving machine and freedom analysis, the overall structure of the machine design, X, Y axis design calculations, drive shaft, linear guide rail select and strength analysis; speed engraving machine motion control accuracy and analysis, Laser engraving machine drive design. Comparison of several common transmission engraving machine, and then determine the transmission scheme of each module according to the specific requirements of laser engraving machine.(2),The common transmission: gear drive mechanism, screw nut drive, chain drive mechanism, belt drive mechanism were compared, with their advantages and disadvantages to determine the engraving machine transmission mechanism, including the X direction laser engraving machine program , Y direction scheme.(3),Analysis and design and the selection of the stepper motor with the stepper motor for the feed drive of the drive system and the transmission mechanism of calculation.(4),Carving some of the major components, such as plate, axis slider minor process analysis and formulation, more familiar with the specific process of its processing.(5),To understand the type and function of PLC control system, as well as the choice of models PLC, laser controlled object motion analysis, a clear request to move the laser, the development of electrical control system solutions.Summary: This design laser engraving machine can be wood, paper, steel and other materials for precision engraving, carving greatly reducing the time and improve production efficiency, thus CNC laser cutting in China's manufacturing industry is playing a huge advantage.Keywords:PLC;Laser engraving machine;Structural design;process design;目录第一章绪论 01.1激光雕刻及相关技术概述 01.1.1激光雕刻技术 01.1.2激光雕刻机的国内外发展状况 01.1.3激光雕刻机自动控制技术 (3)1.2 PLC控制技术概述 (3)1.2.1 PLC系统的基本结构 (3)1.2.2 PLC的特点、应用领域和发展趋势 (4)1.2.3 PLC初步选择 (5)第二章激光雕刻机总体设计 (6)2.1 雕刻机的任务要求和基本结构 (6)2.1.1 雕刻机的任务要求和技术参数 (6)2.1.2雕刻机的基本结构和自由度分析 (7)2.2 雕刻机驱动方案设计 (8)2.2.1 典型驱动方案比较 (8)2.2.2 雕刻机驱动方案确定 (9)2.3 激光雕刻机传动方案设计 (9)2.3.1 常见的传动机构 (9)2.3.2 各部分传动方案设计 (11)2.3.3电机选择 (12)2.3.4轴的校核 (14)2.3.5轴承的结构设计 (15)2.3.6键的选择 (16)2.4 控制系统总体方案 (17)2.5 本章小结 (18)第三章激光雕刻机机械结构设计 (19)3.1机械结构设计 (19)3.1.1底座模块 (19)3.1.2支架模块 (19)3.1.3激光器模块 (20)3.1.4舵机模块 (22)3.1.5 雕刻机总体结构 (23)3.2 本章小结 (24)第四章激光雕刻机主要零件工艺制定 (25)4.1 雕刻机垫板工艺 (25)4.2 雕刻机光滑轴块工艺 (30)4.3 雕刻机短轴工艺 (38)4.4本章小结 (41)第五章激光雕刻机PLC控制系统设计 (42)5.1 PLC控制系统设计步骤 (42)5.2 PLC机型的选择 (42)5.3 PLC控制系统硬件设计 (43)5.3.1 硬件设计总体方案 (43)5.3.2 PLC输入输出设备确定 (45)5.4 本章小结 (467)第六章总结 (478)6.1 全文工作总结 (47)6.2 进一步设想 (47)附录 (49)参考文献 (50)致谢 (53)第一章绪论1.1激光雕刻及相关技术概述1.1.1激光雕刻技术雕刻机技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多门学科而形成的高新技术,其本质是感知、决策、行动和交互四大技术的综合,是当代研究十分活跃、应用日益广泛的领域。
图书分类号:密级:毕业设计(论文)激光打标机结构设计及运动仿真THE DESIGN OF LASER MARKING MACHINESTRUCTUREAND MOVEMENT SIMULATION学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日学位论文版权协议书本人完全了解关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归所拥有。
有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要此次设计主要目标为设计一台激光打标机。
此激光打标机主要用于芯片等小型工件的表面进行打标。
另外,本文还对现今国外激光打标机的发展状况及趋势进行了分析,分析表明在现代高科技不断革新,不断发展的情况下。
激光打标机的运用前景将会越来越广泛。
激光加工技术越来越受到人们的喜爱与认同。
本次设计的任务主要是对激光打标机的机械结构进行分析、设计以及重要部件的运动仿真。
前部分主要是对于激光打标机自动上料机构、机械手、传送带、打标机构、自动下料机构的具体分析与设计,在设计中主要选用了滚珠丝杠副、带轮、导轨等传动系统,并且考虑到使用时的安全性与合理性,还进行了计算与校核。
根据上、下料机构、传送带的正常速度分别对步进电动机进行了选型。
最后还对激光打标机运用UG6.0建模模块进行实体建模,针对激打标机的运动仿真问题,选用UG6.0的运动仿真模块进行模拟。
本次设计的成果为一台可实现全自动打标的激光打标机,采用滚珠丝杠副作为上、下料机构的传动结构、步进电动机为动力装置、机械手为抓取机构、材质为PVC的传送带、滑动导轨等装置。
从目前全球工业及其他行业的发展的情况来看,我们可以总结出国内外激光打标机未来的发展方向:全自动化、打标材料的多样化、微型精密化。
关键词激光打标;打标机;运动仿真AbstractMain target of this design for the design of a laser marking machine.The laser marking machine is mainly used for chips and other small work-pieces surface marking.In addition, this article analyzed the current development status and trend of foreign laser marking machine, the analysis shows that the application of laser marking machine prospects will be more and more ser processing technology more and more get of people love and acceptance,under the condition of continuous development,in the modern high-tech innovation.This design mainly completed the mechanical structural design of laser marking machine and motion simulation of important components,etc.The specific analysis and design for the automatic feeding mechanism,automatic blanking agency and the work-piece position structure Using the transport ball screw,conveyor,guide rail in the design. And considering the safety and rationality of laser marking when using,Also carried out calculation and checking.According to the speed of the automatic feeding mechanism selected motor to laser marking machine movement simulation problem, I use UG6.0 to simulate motion to simulation module.The results of this design is a laser marking machine that can realize automatic play target, adopting the ball screw vice as a transmission structure, choosing stepper motor as the power device, the manipulator for grasping mechanism, PVC for conveyor belt material,side guide device and so on.From the current global industry and the development of other industries, we can come to the conclusion that the development direction of laser marking machine at home and abroad in the future: full automatic, marking the diversification of material, the micro motors.Keywords Laser marking Laser marking machine Motion simulation目录摘要 (I)Abstract.................................................................... ∏1 绪论. (1)1.1课题背景及意义 (1)1.2激光打标技术原理与特点 (1)1.3设计任务 (2)2总体方案设计分析 (3)3机架设计 (4)3.1机架类型的选择与确定.................................. 错误!未定义书签。
3.2机架强度的校核........................................ 错误!未定义书签。
4自动上、下料机构........................................... 错误!未定义书签。
4.1上、下料机构.......................................... 错误!未定义书签。
4.2滚珠丝杠传动系统设计.................................. 错误!未定义书签。
4.2.1滚珠丝杠的介绍................................... 错误!未定义书签。
4.2.2强度计算......................................... 错误!未定义书签。
4.2.3计算选定编号..................................... 错误!未定义书签。
4.2.4丝杠的校核....................................... 错误!未定义书签。
4.3滚珠丝杠支撑轴承的选择................................ 错误!未定义书签。
4.3.1轴承的计算....................................... 错误!未定义书签。
4.3.2轴承的刚度确定................................... 错误!未定义书签。
4.3.3轴承的预紧与润滑................................. 错误!未定义书签。
4.4支撑杆的校核.......................................... 错误!未定义书签。
4.5驱动电动机的选型...................................... 错误!未定义书签。
4.6带传动的设计.......................................... 错误!未定义书签。
4.7 V带轮的设计.......................................... 错误!未定义书签。
5 机械手的设计............................................... 错误!未定义书签。
5.1机械手的组成.......................................... 错误!未定义书签。
5.2手部结构的设计........................................ 错误!未定义书签。
5.3手部驱动力的计算...................................... 错误!未定义书签。
5.4手腕驱动力矩计算...................................... 错误!未定义书签。
6 传送带设计................................................. 错误!未定义书签。
6.1传送带的设计及校核.................................... 错误!未定义书签。
6.1.1带速的确定....................................... 错误!未定义书签。