浅谈雷达伺服系统的设计
- 格式:pdf
- 大小:1.84 MB
- 文档页数:1
伺服系统的软件设计与开发伺服系统是一种具有反馈控制的电机控制系统,其主要功能是精确控制伺服电机的运动,使其在给定的时间内到达目标位置或达到目标速度。
在伺服系统中,软件系统起着至关重要的作用,它负责将高层控制指令转化为电机控制信号,并运行在嵌入式系统上,实时控制运动状态和运动精度。
1.伺服系统软件设计的基本要求伺服系统软件设计的基本要求是实时性、可靠性和稳定性。
实时性是指系统必须以确定的时间响应用户的指令,保证在规定的时间内完成控制任务。
可靠性是指系统必须在长时间的运行中保持稳定,不出现死机、控制失效等故障。
稳定性是指系统必须能够在不同环境下保持稳定的控制精度和运动精度。
2.伺服系统软件设计的框架和工具伺服系统的软件设计应该遵循模块化、可复用、可维护和可移植的原则。
常见的设计框架包括MVC模式、MVVM模式和其他基于组件化的设计模式。
软件的编写语言可以选择C、C++、Python等,开发环境可以使用Visual Studio、Eclipse等IDE软件。
同时要注意选择合适的编译器、调试器和代码版本管理工具。
3.伺服系统软件设计的关键技术(1)运动控制算法伺服系统的核心技术是运动控制算法,实现良好的运动控制算法是保证伺服系统运行稳定的关键。
运动控制算法主要包括位置控制、速度控制和力控制等方法,可以应用PID、自适应控制、模糊控制、神经网络控制等算法实现。
(2)位置检测与反馈控制伺服系统需要有高精度的位置检测系统和反馈控制系统,以实现对电机位置的精确控制。
通常采用编码器、激光干涉仪、光电开关等位置传感器进行位置检测,通过高精度的反馈进行闭环控制。
(3)通信协议伺服系统需要与上位机、其他设备进行通信,因此需要制定或选择合适的通信协议。
常用的协议包括CAN总线、RS485总线、以太网通信等,应根据实际的控制应用场景选择。
4.伺服系统软件开发流程伺服系统软件开发需要遵循软件工程的基本原则和开发流程,包括需求分析、设计、编码、测试和维护等阶段。
如何设计高性能伺服系统高性能伺服系统是现代工业自动化领域中不可或缺的部分,它具有快速响应、高精度、可靠性强等特点,已经广泛应用于工业生产和机器人控制等领域。
那么,如何设计高性能伺服系统呢?一、系统性能需求分析在设计高性能伺服系统之前,首先需要进行系统性能需求分析。
要考虑到系统对控制精度、速度和力矩等方面的需求,同时还要考虑到可靠性、抗干扰能力、响应速度等方面的因素。
同时要确定系统的实时性和运行周期,以及每个周期的计算量,和目标芯片的处理能力比较。
二、伺服系统结构设计伺服系统的结构设计是关键之一。
一般伺服系统由电机、传感器、控制器三个基本部分组成。
其中,电机是伺服系统的执行机构,传感器用来检测机器人的位置和状态,控制器则是伺服系统的核心部件。
采用先进的无刷伺服电机,可以大大提高系统的动态性能和控制精度,同时降低噪声和振动。
控制器一般采用数字信号处理器(DSP),配合高速ADC和PWM模块,用于实时控制电机转速和输出力矩。
同时还要注意控制系统的稳定性和滤波性能,避免产生过度震荡或粘滞现象。
三、控制算法设计控制算法设计是伺服系统设计的核心之一。
常用的控制算法有PID 控制器、模糊控制、自适应控制等。
PID控制器是伺服系统中最常用的一种控制算法,通过不断对反馈信号进行调整,使输出信号逐步趋近于目标值,从而实现对电机速度和位置等参数的控制。
四、信号采集和处理设计信号采集和处理是伺服系统实现高精度控制的关键技术之一。
由于所采集的信号可能存在噪声和杂波,因此需要采用滤波、放大和去噪等技术进行处理。
同时还需要对信号进行采样和量化,使其能够被数字信号处理器进行处理。
五、系统硬件设计伺服系统的硬件设计也是非常关键的。
硬件设计要考虑到可靠性、稳定性、抗干扰能力等因素。
通常要对系统的电源、电路、线路和机构进行分析和设计。
六、系统软件设计伺服系统的软件设计也非常重要。
一般情况下,伺服系统的软件设计需要考虑到以下几个方面。
雷达天线伺服控制系统
雷达是一种通过将电磁波辐射向目标物体并接收反射波来检测其位置和速度的设备。
雷达天线是雷达系统的重要组成部分,它将电磁波辐射出去,并接收目标物体反射回来的
信号。
雷达天线伺服控制系统的主要作用是使雷达天线保持在目标物的方向上,并能够跟
随目标物的运动轨迹进行调整。
雷达天线伺服控制系统由电机、编码器、控制器等组成。
电机通过传动系统控制雷达
天线的角度,编码器用于反馈雷达天线的角度信息,控制器则根据编码器反馈的信息,控
制电机的转动并保持天线的位置与目标物保持一致。
雷达天线伺服控制系统的优点是精度高、反应迅速、可靠性强、适应性好。
该系统可
以根据各自的需求设置不同的工作模式,以适应不同复杂的环境条件。
当雷达天线工作在
垂直方向的情况下,需要较高的精确度和控制灵敏度。
当雷达天线工作在水平方向时,需
要更快的相应速度和更小的误差范围。
在这种系统中,控制器是枢纽和核心,它对电机、编码器和其他传感器进行信号的采集、处理、分析和判断,并输出控制命令,实现天线角度的控制和跟随。
此外,控制器还
可以提供反馈信息和故障报警标志,对系统的安全性和稳定性起到重要的作用。
总之,雷达天线伺服控制系统具有重要的作用。
这种系统可以确保雷达天线达到准确、快捷、灵活的聚焦目标物的能力,以满足人们对雷达设备的多种应用需求。
为了达到最佳
的工作效率和性能,该系统必须受到严格的质量控制和保养,以保证其安全性和可靠性。
《激光雷达单轴二维扫描系统的设计》一、引言随着科技的不断进步,激光雷达技术在众多领域中得到了广泛的应用。
激光雷达单轴二维扫描系统作为激光雷达技术的重要组成部分,其设计对于提高系统性能、扩大应用范围具有重要意义。
本文将详细介绍激光雷达单轴二维扫描系统的设计原理、方法及实现过程。
二、系统设计目标激光雷达单轴二维扫描系统的设计目标主要包括:1. 实现单轴旋转扫描,以获取目标物体的二维空间信息。
2. 提高扫描速度和精度,以满足不同应用场景的需求。
3. 降低系统成本,提高系统的可靠性和稳定性。
三、系统组成与设计原理激光雷达单轴二维扫描系统主要由激光发射器、接收器、旋转机构、控制系统等部分组成。
设计原理如下:1. 激光发射器发出激光束,照射到目标物体上。
2. 接收器接收反射回来的激光束,将其转换为电信号。
3. 旋转机构驱动激光发射器和接收器进行单轴旋转扫描。
4. 控制系统负责控制旋转机构的转速和扫描角度,同时对接收到的电信号进行处理和分析,得到目标物体的二维空间信息。
四、关键技术及实现方法1. 旋转机构设计:采用高精度、低噪声的电机驱动技术,确保扫描的稳定性和精度。
同时,优化机械结构,减小摩擦和回程误差。
2. 控制系统设计:采用高性能的控制器和算法,实现高速、高精度的数据采集和处理。
通过优化控制策略,提高系统的动态性能和响应速度。
3. 激光发射与接收技术:选用高功率、高稳定性的激光发射器,确保激光束的质量和扫描范围。
同时,采用高灵敏度、低噪声的接收器,提高信号的信噪比。
4. 校准与标定技术:在系统安装和使用过程中,需要进行校准和标定,以确保扫描数据的准确性和可靠性。
校准包括机械校准和光学校准,标定包括距离标定和角度标定。
五、系统性能评估与优化1. 性能评估:通过实验测试,对系统的扫描速度、精度、稳定性等性能指标进行评估。
同时,分析系统的成本和可靠性等因素,为优化提供依据。
2. 性能优化:针对评估结果,对系统进行优化设计。
教学雷达伺服系统设计与制作于仕财;康健;丛瑜;韩建立;刘智勇【摘要】介绍了教学雷达伺服系统的设计背景及制作过程,叙述了设计思路、整体结构、实验效果以及带来的实验教学改革成就.指导本科学员利用报废设备制作实用的教学仪器,是提高本科生实践技能的有效教学手段,也是对实验仪器资源的开源节流的有益探索.该系统的设计与制作激发了学员的创新意识与实践能力,节省了仪器购置经费,是一条实用的教学改革道路.【期刊名称】《电子设计工程》【年(卷),期】2013(021)018【总页数】4页(P104-107)【关键词】雷达伺服;仪器研制;创新意识;实验教学【作者】于仕财;康健;丛瑜;韩建立;刘智勇【作者单位】海军航空工程学院电子信息工程系,山东烟台264001;海军航空工程学院电子信息工程系,山东烟台264001;海军航空工程学院电子信息工程系,山东烟台264001;海军航空工程学院科研部,山东烟台264001;海军航空工程学院训练部,山东烟台264001【正文语种】中文【中图分类】TN957.2当前,雷达技术迅速发展,雷达装备处于更新换代的崩发期。
但大量报废的雷达装备并没有质量问题,利用这些装备开展雷达教学活动切实可行。
文中利用一套报废的雷达天线,指导学员设计与制作了雷达伺服系统,配以液晶显示界面,可以完整地演示雷达天线伺服系统的各个环节的原理。
该系统几乎“零”成本地实现了教学设备的补充,同时设计与制作过程中锻炼了本科生的实践技能[1-3]。
1 系统设计报废的雷达天线只有天线的机械部分,要完成伺服系统教学演示功能,先期提出了3个方面的要求:1)完成天线的正转、反转、快转、慢转、换向、急停等基本的天线的运转方式;2)能实时显示天线的相关运动要素,例如转速、转向、实时方位等;3)演示系统要有良好的可参观性,即需要设计一个合理的支撑装置[4-5]。
针对以上所提出的3个基本要求,接受指导的两名学员分工合作,设计了基本方案。
天馈伺系统基于CAN总线的雷达电液伺服系统设计3黄建国(南京电子技术研究所, 南京210013)【摘要】 给出了一种基于CA N总线的雷达电液伺服系统的设计与应用,对CAN总线的接口硬件电路设计、系统的整体结构、各节点功能及软件设计分别作了详细说明。
实际应用表明,该方案具有结构简单、可靠性高、性能价格比高的特点。
【关键词】 控制器局域网络;现场总线;单片机C8051F040;雷达电液伺服系统中图分类号:T N82 文献标识码:AD esi gn of Ra darE l ectr o2hydra uli c Ser vo System Ba sed on CAN BusHU ANG Jian2guo(Nanjing Re sear ch I nstitute of Electr onic s Technol ogy, Nanjing210013,China)【Ab stra ct】 This pape r p re sents a kind of desig n and appli ca ti on of rada r elec tro2hydraulic se rv o syste m ba s ed on CA N bus.The CAN bus inte rface ha rd ware,overall a rchitecture,func ti on of each node and s oft wa re design are dis cuss ed in de tail.It is sho wn thr ough app licati on that the system is si mp le,re liable and has high perfor mance2cost ra ti o.【Key word s】C AN;field bus;C8051F040;rada r e l ec tro2hydrauli c serv o syste m0 引 言控制器局域网络(Contr oller A rea Ne t w ork,CA N)是目前被广泛应用在汽车工业、航空工业、工业控制等领域的一种国际标准现场总线。
FMCW雷达系统设计及应用随着科技水平不断提高,雷达技术的应用也得到了广泛的关注和发展。
而FMCW雷达系统作为一种新型的雷达技术,受到了越来越多的重视和关注。
本文将介绍FMCW雷达系统的设计原理及应用,并探讨其在目标检测、气象探测、地质勘探等领域中的应用。
一、 FMCW雷达系统的设计原理FMCW雷达系统是根据频率调制连续波原理制作而成的雷达系统,其特点在于发射端产生具有一定调频率的连续波信号,然后将该信号发送到接收端,同时通过反射回来的信号来检测目标物的位置。
该系统的传输频率范围通常为几千兆赫到数千兆赫之间,能够在雷达系统中实现很好的波长稳定性。
FMCW雷达系统的设计原理是通过不断调整波形的频率和相位,从而实现目标距离、速度等参数的确定。
具体而言,FMCW雷达系统可分为发射端、接收端、信号处理器三个部分。
发射端产生调制频率信号,将其送至天线,形成调制波形并发射出去;前向散射的回波信号经过接收天线接收,并转换成电信号;信号处理器对输入信号进行干扰抑制、频率分析、快速傅里叶变换等处理,从而得到目标的距离和速度等信息。
二、 FMCW雷达系统的应用由于FMCW雷达系统具有频率调制、高分辨率、高灵敏度等独特的性能,因此在物体检测、气象探测、地质勘探等领域均有广泛的应用。
1. 目标检测FMCW雷达系统能够实现高速的物体检测和距离测量,因此被广泛应用于车辆安全、行人安全等方面。
例如,车载FMCW雷达系统可以实时监测路面上的车辆和行人,通过处理回波信号的距离和速度等信息去作出预测,从而提高运输安全性。
同时,FMCW雷达系统的信号处理能力可以有效地处理目标噪声和干扰,提高雷达系统的准确性和可靠性。
2. 气象探测气象探测是FMCW雷达系统的另一个重要应用领域。
目前FMCW雷达系统在天气预报和风速测量领域已经广泛应用。
FMCW雷达系统能够通过检测大气中的液态物或者冰态物的反射信号来测量降水和云高度等参数,从而帮助天气预报机构作出更准确的预报。
第一章相控阵雷达系发射信号的设计与分析1.1 雷达工作原理雷达是Radar(RAdio Detection And Ranging)的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
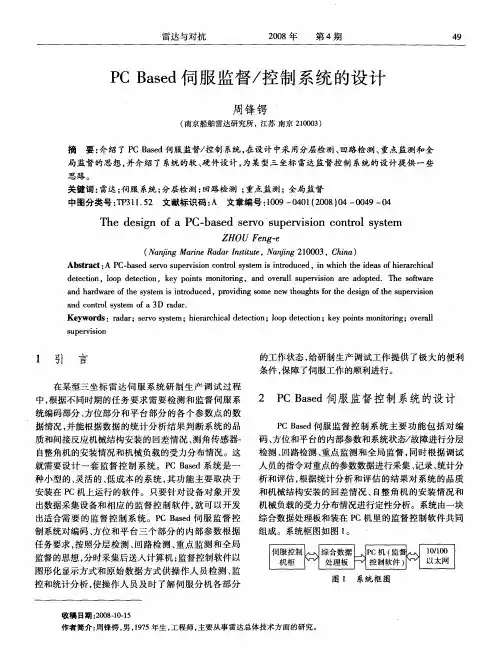
典型的雷达系统如图1.1,它主要由发射机,天线,接收机,数据处理,定时控制,显示等设备组成。
利用雷达可以获知目标的有无,目标斜距,目标角位置,目标相对速度等。
现代高分辨雷达扩展了原始雷达概念,使它具有对运动目标(飞机,导弹等)和区域目标(地面等)成像和识别的能力。
雷达的应用越来越广泛。
图1.1:简单脉冲雷达系统框图雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。
假设理想点目标与雷达的相对距离为R,为了探测这个目标,雷达发射信号()s t,电磁波以光速C向四周传播,经过时间R后电磁波到达目标,照射到目标上的电磁波可写成:()R-。
s tC电磁波与目标相互作用,一部分电磁波被目标散射,被反射的电磁波为()Rσ⋅-,其中σ为目s tC标的雷达散射截面(Radar Cross Section ,简称RCS),反映目标对电磁波的散射能力。
再经过时间R C 后,被雷达接收天线接收的信号为(2)R s t Cσ⋅-。
如果将雷达天线和目标看作一个系统,便得到如图1.2的等效,而且这是一个LTI (线性时不变)系统。
图1.2:雷达等效于LTI 系统等效LTI 系统的冲击响应可写成:1()()Mi i i h t t σδτ==-∑ (1.1)M 表示目标的个数,i σ是目标散射特性,i τ是光速在雷达与目标之间往返一次的时间,2ii R cτ=(1.2) 式中,i R 为第i 个目标与雷达的相对距离。
270
理论研究
浅谈雷达伺服系统的设计
石小萍,刘兴兴,陈 丁
(西安黄河机电有限公司设计研究所,西安 710043)
摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,
最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机
1 引言
伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的
机电自动控制技术。“伺服系统”实际上是控制天线机械传动系统按
设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动
到某位置。伺服系统也被称为“随动系统”。伺服系统与其他控制系
统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)
或加速度(角加速度)。给定的输入量往往是小功率的信号。
2 伺服系统的设计
进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明
伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统
方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺
服回路”。常规产品一般有速度回路、位置回路、稳定回路等等。通
过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以
及执行元件和位置检测元件的功能和设计要求。
2.1 伺服系统闭环控制回路
2.1.1 伺服系统速度回路通道
速度回路的主要作用是控制天线跟踪目标速度的快慢。典型的伺
服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴
末端的测速装置为传感元件。工作过程:伺服执行电机收到控制计算
机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线
跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,
获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择
伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。技术难点是伺服控制分配阀
生产调试较为困难,需要配备专用的液压调设备。另外漏油问题解决
难度较大,限制其应用范围。力矩电机直接驱动天线转动最大优点就
是没有减速传动装置,避免了齿轮减速传动的精度误差和回差等影响,
扭转刚度较高,相应的伺服机械机构设计的谐振频率也比较高。但受
到驱动功率的现在,适用于中小型雷达的驱动。直流电机驱动在精密
跟踪雷达中运用比较多,对各种类型、尺寸的天线均有比较成熟的伺
服机械控制技术经验。对于天线转动要求比较简单的场合用交流电机
比较多,伺服控制、机械传动设计均不高。与驱动元件相匹配的机械
减速传动装置有普通齿轮减速箱、涡轮轮杆机构、渐开线行星齿轮减
速器,少齿差行星减速器、摆线针轮行星减速器、谐波齿轮机构、普
通丝杠和滚珠丝杠、同步齿形带等。
2.3 位置检测装置
伺服系统需要实时获取天线的位置信息,要求在设计时考虑到精
确的位置检测。常用的位置检测装置有:(1)光电编码器的特点是
精度高、分辨率高、可靠性较高,最高分辨率可达27位,但属于光
学精密仪器,不能耐较大机械振动和冲击,否则会造成伤害。(2)
旋转变压器的特点是结构简单、工作稳定可靠、抗干扰能力强、对环
境要求低,但精度不如光电编码器。(3)感应同步器其特点是对环
境要求较低,非接触式测量,无磨损,工作可靠,使用寿命较长,但
只适用于线性测量,不能用于角度测量。
3 伺服系统性能参数的检测
伺服系统性能参数主要包括转动惯量、摩擦力矩、传动误差及回
程误差等。测量其性能参数的目的是检验传动链的性能是否满足设计
要求,并由此分析影响传动链的因素,以便进一步提高伺服传动装置
的性能。
4 结束语
伺服系统是雷达搜索、捕获目标并跟踪、测定目标所在位置及各
种运动参数的电子设备。快速捕获目标,按特定要求平稳跟踪目标,
并精确定位是雷达最基本的要求,也是伺服自动控制设计和天线转动
设计的基本要求。在雷达系统中常用伺服传动装置有:伺服驱动元件、
传动机构和位置检测装置等,其各部分的性能、匹配关系和控制策略
决定了雷达伺服系统的总体性能。
参考文献:
[1]张润逵,戚仁欣,张树雄.雷达结构与工艺[M].北京:电子工业
出版社,2007:41-93.
[2]丁鹭飞,耿富录,陈建春.雷达原理[M].4版.西安:西安电子
科技大学出版社,2011.
[3]陈丁,王放,李婷婷等.通用雷达信号场景系统的研制[J].电子
科技,2014,27(06):66+71.
作者简介:石小萍(1986-),女,陕西大荔人,工学学士,助理工程师,
主要从事雷达随动控制系统设计。
图1 伺服系统速度回路
2.1.2 伺服系统位置回路通道
位置回路通道的功能是将伺服系统驱动天线转动后,所处的位
置由机械角度参数转换为电参数,在传递到相应的模块,变成位置
控制参数或相应的显示设备。位置回路的几个通道及元件、设备如
图2所示:
图2 伺服系统位置回路