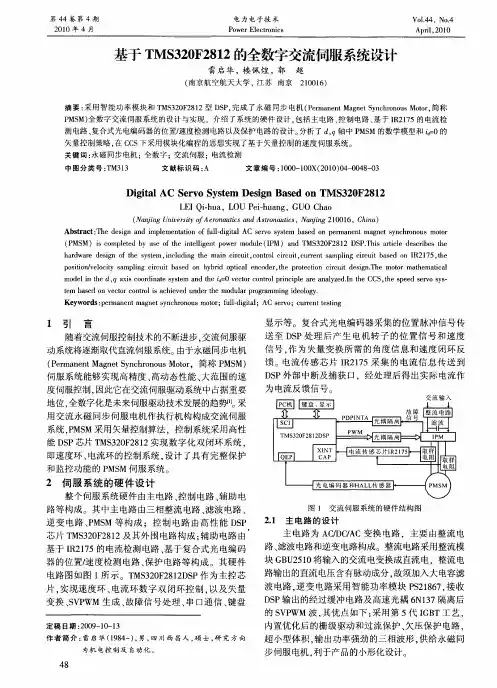
基于MINAS的跟踪雷达全数字交流伺服系统
- 格式:pdf
- 大小:323.58 KB
- 文档页数:4

270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
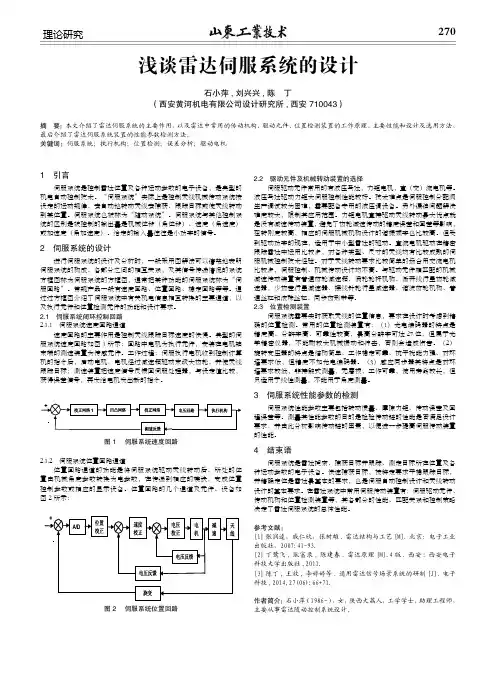
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
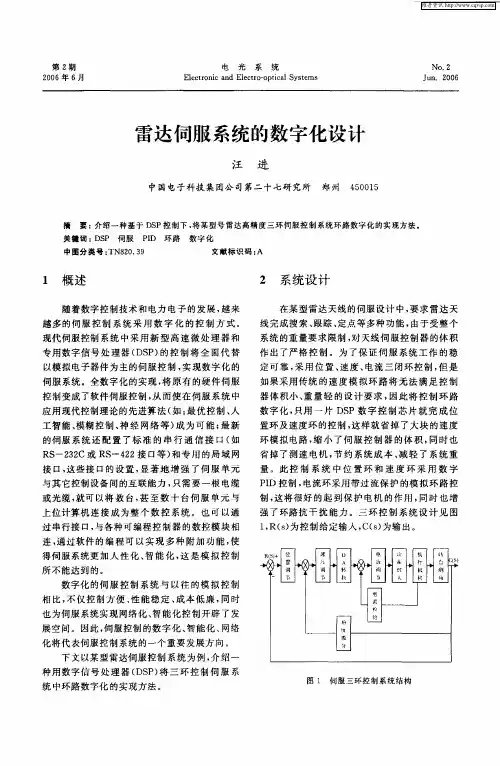
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。

PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号 类型输入电源 型号 电压额定功率额定转速编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105 A 型 单相100V MSMD5AZS1*50W7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107A 型单相100VMSMD011S1*100V100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205A 型单相200VMSMD012S1*100W7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W3000rpm7线制,17位MAMA012P1*5线制,2500p/rMADDT1207A 型单相200VMAMA012S1*200V100W 5000rpm7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110B 型单相100VMSMD021S1*100V 200W7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W3000rpm7线制,17位MAMA022P1*5线制,2500p/rMBDDT2210B 型单相200VMAMA022S1*200V 200W 5000rpm7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120C 型单相100VMSMD041S1*100V 400W7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W3000rpm7线制,17位MAMD042P1*5线制,2500p/rMCDDT3520C 型单相/三相 200VMAMD042S1*200V 400W 5000rpm7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。
舰载火控雷达交流伺服系统仿真分析1.引言:介绍舰载火控雷达交流伺服系统和其重要性,同时介绍仿真分析的重要性和本文的研究目的。
2.系统概述:介绍舰载火控雷达交流伺服系统的功能和构成,讲解各个部分的作用及其工作原理,以及各个部分之间的关系。
3.数学模型:建立舰载火控雷达交流伺服系统的数学模型,并详细介绍模型各个部分包括传输模型、控制模型以及实际模型,以及这些模型的数学形式和物理意义。
4.仿真分析:基于建立的数学模型,使用Simulink建立舰载火控雷达交流伺服系统的仿真模型,对系统进行仿真分析,包括系统稳定性、系统响应速度、控制效果等指标的分析,并考虑与实际系统的误差。
5.结论和展望:总结本文的研究工作,分析仿真结果,提出结论,同时展望未来可能的改进和研究方向,为舰载火控雷达交流伺服系统的优化提供帮助。
第一章节是引言,主要介绍舰载火控雷达交流伺服系统的重要性以及本文的研究目的。
现代军事技术的快速发展和日益增强的国家安全要求,使得军事装备的精度和效率要求越来越高。
舰载火控雷达在现代军舰中扮演着重要的角色,能够对来袭目标进行探测和跟踪,并进行精确打击。
而舰载火控雷达交流伺服系统则是控制火控雷达瞄准机构的重要部件,直接影响着系统响应速度、稳态误差和动态误差等指标。
为了提高舰载火控雷达交流伺服系统的性能、优化系统结构,需要进行仿真分析来对系统进行评测和优化。
这种仿真分析的有效性在过去的研究中已被证明。
与其他测试和优化方法相比,仿真分析具有便利性和经济性,能够建立多种场景并对不同参数组合进行测试,以最小的代价实现全面的测试。
本文的研究目的是基于舰载火控雷达交流伺服系统的数学模型,建立系统的仿真模型,并对系统进行仿真分析。
通过对系统的仿真分析,评测系统在不同条件下的性能指标,比如系统响应速度、稳态误差和动态误差等指标,并与实际系统的误差进行对比分析。
最终,从模型分析的角度考虑如何优化系统的结构和性能,从而提高系统的效率和精度。
PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号 类型输入电源 型号 电压额定功率额定转速编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105 A 型 单相100V MSMD5AZS1*50W7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107A 型单相100VMSMD011S1*100V100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205A 型单相200VMSMD012S1*100W7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W3000rpm7线制,17位MAMA012P1*5线制,2500p/rMADDT1207A 型单相200VMAMA012S1*200V100W 5000rpm7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110B 型单相100VMSMD021S1*100V 200W7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W3000rpm7线制,17位MAMA022P1*5线制,2500p/rMBDDT2210B 型单相200VMAMA022S1*200V 200W 5000rpm7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120C 型单相100VMSMD041S1*100V 400W7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W3000rpm7线制,17位MAMD042P1*5线制,2500p/rMCDDT3520C 型单相/三相 200VMAMD042S1*200V 400W 5000rpm7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。
PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号 类型输入电源 型号 电压额定功率额定转速编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105 A 型 单相100V MSMD5AZS1*50W7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107A 型单相100VMSMD011S1*100V100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205A 型单相200VMSMD012S1*100W7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W3000rpm7线制,17位MAMA012P1*5线制,2500p/rMADDT1207A 型单相200VMAMA012S1*200V100W 5000rpm7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110B 型单相100VMSMD021S1*100V 200W7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W3000rpm7线制,17位MAMA022P1*5线制,2500p/rMBDDT2210B 型单相200VMAMA022S1*200V 200W 5000rpm7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120C 型单相100VMSMD041S1*100V 400W7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W3000rpm7线制,17位MAMD042P1*5线制,2500p/rMCDDT3520C 型单相/三相 200VMAMD042S1*200V 400W 5000rpm7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。
雷达天线伺服控制系统
雷达是一种通过将电磁波辐射向目标物体并接收反射波来检测其位置和速度的设备。
雷达天线是雷达系统的重要组成部分,它将电磁波辐射出去,并接收目标物体反射回来的
信号。
雷达天线伺服控制系统的主要作用是使雷达天线保持在目标物的方向上,并能够跟
随目标物的运动轨迹进行调整。
雷达天线伺服控制系统由电机、编码器、控制器等组成。
电机通过传动系统控制雷达
天线的角度,编码器用于反馈雷达天线的角度信息,控制器则根据编码器反馈的信息,控
制电机的转动并保持天线的位置与目标物保持一致。
雷达天线伺服控制系统的优点是精度高、反应迅速、可靠性强、适应性好。
该系统可
以根据各自的需求设置不同的工作模式,以适应不同复杂的环境条件。
当雷达天线工作在
垂直方向的情况下,需要较高的精确度和控制灵敏度。
当雷达天线工作在水平方向时,需
要更快的相应速度和更小的误差范围。
在这种系统中,控制器是枢纽和核心,它对电机、编码器和其他传感器进行信号的采集、处理、分析和判断,并输出控制命令,实现天线角度的控制和跟随。
此外,控制器还
可以提供反馈信息和故障报警标志,对系统的安全性和稳定性起到重要的作用。
总之,雷达天线伺服控制系统具有重要的作用。
这种系统可以确保雷达天线达到准确、快捷、灵活的聚焦目标物的能力,以满足人们对雷达设备的多种应用需求。
为了达到最佳
的工作效率和性能,该系统必须受到严格的质量控制和保养,以保证其安全性和可靠性。
基于DSP的空间光通信的精跟踪数字伺服系统的设计
周磊;刘鹏;于晓惠
【期刊名称】《长春理工大学学报(自然科学版)》
【年(卷),期】2007(030)004
【摘要】精跟踪伺服系统在自由空间激光通信中具有重要地位.为了实现精跟踪伺服系统的实时性和小型化,本文采用TI公司的TMS320x240x系列的DSP器件TMS320LF2407作为核心控制器,设计了基于DSP的精跟踪数字伺服系统.本系统主要由CCD先斑成像单元、脱靶量图像处理单元、DSP数字伺服单元和振镜伺服单元组成.其中DSP数字伺服单元主要完成光斑脱靶量的数据解算、控制补偿算法的实现、与脱靶量图像处理单元的串口通信以及对振镜伺服单元的控制.最后经过实验证明本系统达到了实时处理的能力,并实现了整个精跟踪伺服系统的小型化.【总页数】4页(P19-22)
【作者】周磊;刘鹏;于晓惠
【作者单位】长春理工大学,光电工程学院,长春,130022;长春理工大学,光电工程学院,长春,130022;长春市测绘院,长春,130021
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于SOPC Builder的空间光通信ATP精跟踪控制器的设计实现 [J], 王进
2.空间光通信精跟踪系统电路接口板设计 [J], 肖永军;左韬;林贻翔
3.基于PC104的精跟踪数字伺服系统的实现 [J], 齐宇岚;陈洋;佟首峰
4.基于dsPIC的精跟踪控制系统设计 [J], 谭逢富;陈修涛;姚佰栋;侯再红
5.基于自校正控制的空间光通信精跟踪系统设计 [J], 左韬;黄海波;肖永军
因版权原因,仅展示原文概要,查看原文内容请购买。
雷达转台伺服控制器国产化设计与应用验证摘要:为适应雷达转台伺服控制系统国产化发展需求,设计开发了一种全国产化的雷达转台伺服控制器。
介绍了全国产化雷达转台伺服控制器的控制架构,包括电源芯片、DSP模块、FPGA模块、光耦等核心元器件的国产化替代选型。
通过试验验证了全国产化雷达转台伺服控制器方案的可行性,为后续雷达转台产品全国产化伺服控制器的应用提供了工程参考价值。
关键词:雷达转台;伺服控制器;国产化;应用验证1 引言当前国际形势日趋严峻,欧美等国加强了对我国的技术制裁,很多关键元器件对我国实施禁售禁运政策。
随着近年来我国航天事业的飞速发展,航天产品关键元器件主要依赖进口与国外对元器件严格控制之间的矛盾更为突出[1]。
电子元器件作为武器装备研制、生产和使用的战略物质基础,探索其独立自主的国产化研发道路具有重要的战略意义[2]。
雷达在军事方面扮演着重要的角色,可用于目标侦察和监控,帮助监控敌方行动,还可用于制导导弹和炮火,提高命中率和战斗效果[3]。
因此,雷达被广泛应用于军事防御和攻击中。
雷达伺服系统是雷达系统的核心部分之一,可实现跟踪、导引、制导等功能,高精度的伺服控制定位大大提高了雷达系统的作用和效率[4]。
2 全国产化伺服控制器架构为实现控制器的通用化、全国产和低成本,采用基于FPGA外设扩展的控制架构[5]。
该架构下,集成化控制器组成框图如图1所示,主要包括供电模块、DSP模块、FPGA模块、光耦隔离模块以及各通信模块。
该控制架构充分利用了DSP丰富的中断资源和FPGA外设串口资源。
工作原理是DSP作为雷达转台的控制器接收到上位机下发的指令后,进入相应的控制流程,经过运算后通过FPGA输出控制信号到电机驱动模块,经放大后驱动电机带动负载按要求转动,角编码器实时反馈角度信息,参与系统闭环控制。
图1 集成化控制器组成框图3 控制器国产化设计本章主要介绍控制器的供电模块、DSP模块、FPGA模块及光耦隔离模块等核心器件的国产化设计。
PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号类型输入电源 型号 电压额定功率额定转速 编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105A 型 单相100V MSMD5AZS1*50W 7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107 A 型 单相100V MSMD011S1*100V 100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205 A 型 单相200V MSMD012S1*100W 7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W 3000rpm 7线制,17位 MAMA012P1*5线制,2500p/r MADDT1207 A 型 单相200V MAMA012S1*200V 100W 5000rpm 7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110 B 型 单相100V MSMD021S1*100V 200W 7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W 3000rpm 7线制,17位 MAMA022P1*5线制,2500p/r MBDDT2210 B 型 单相200V MAMA022S1*200V 200W 5000rpm 7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120 C 型 单相100V MSMD041S1*100V 400W 7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W 3000rpm 7线制,17位 MAMD042P1*5线制,2500p/r MCDDT3520 C 型 单相/三相200V MAMD042S1*200V 400W 5000rpm 7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。