雷达天线及伺服系统
- 格式:pdf
- 大小:2.79 MB
- 文档页数:81
伺服系统在军事装备中的关键作用是什么在当今的军事领域,先进的技术装备层出不穷,而伺服系统作为其中的关键组成部分,发挥着至关重要的作用。
那么,它究竟有着怎样的关键作用呢?首先,我们来了解一下什么是伺服系统。
简单来说,伺服系统是一种能够精确控制机械运动的自动控制系统。
它由控制器、驱动器、电机和传感器等部件组成,可以实现对位置、速度和加速度等运动参数的高精度控制。
在军事装备中,伺服系统的第一个关键作用是提高武器装备的精度和准确性。
以导弹为例,导弹的制导和飞行控制离不开伺服系统的精确运作。
在导弹发射后,伺服系统能够根据预设的目标信息和实时的飞行数据,精确调整导弹的飞行姿态、方向和速度,确保导弹能够准确命中目标。
这种高精度的控制能力,使得军事打击的效果得到了极大的提升,减少了不必要的损失和浪费。
其次,伺服系统有助于增强军事装备的响应速度和机动性。
在现代战争中,速度和机动性往往决定着战斗的胜负。
例如,战斗机的飞行控制面,如舵面和副翼,就是通过伺服系统来快速响应飞行员的操作指令。
当飞行员进行机动动作时,伺服系统能够在极短的时间内调整控制面的角度,从而改变飞机的飞行姿态和方向,使战斗机能够迅速躲避敌方攻击或占据有利的攻击位置。
同样,在坦克、装甲车等地面装备中,伺服系统也能够快速调整炮塔的旋转和火炮的俯仰角度,提高武器系统的反应速度和作战效能。
再者,伺服系统对于提高军事装备的稳定性和可靠性也起着不可或缺的作用。
在复杂的战场环境下,军事装备需要经受各种恶劣条件的考验,如高温、低温、振动、冲击等。
伺服系统通过精确的控制和反馈机制,能够有效地减少外部干扰对装备性能的影响,确保装备在各种极端条件下仍能稳定运行。
例如,在舰艇的航行过程中,伺服系统可以控制舵机的动作,保持舰艇的航向稳定,避免因风浪等因素导致的偏离。
这种稳定性和可靠性的保障,对于军事行动的顺利进行具有重要意义。
此外,伺服系统还能够实现军事装备的自动化和智能化操作。
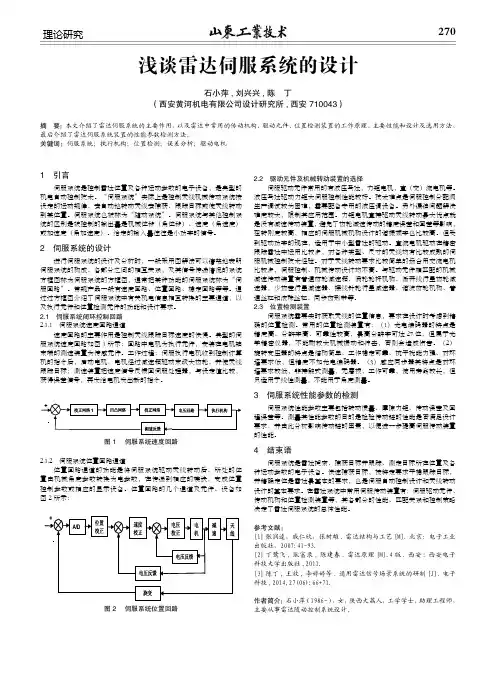
270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。

雷达伺服系统设计与仿真作者:陈静来源:《城市建设理论研究》2013年第29期摘要:雷达伺服系统是自动控制理论的典型应用,本文主要介绍了雷达伺服系统的论证、设计过程和方法,阐述了以传递函数为基础的经典控制理论和现代控制理论,基于对雷达伺服系统的设计研究,对伺服系统进行仿真和性能评估,总结了分析和提高伺服系统性能的方法。
关键词:伺服系统设计过程仿真和性能评估控制理论中图分类号:TN95 文献标识码:A伺服系统设计伺服系统的设计方法通常有时间响应分析方法、根轨迹法和频率响应分析法三种。
伺服系统设计的主要技术指标有:工作范围、稳定性、过渡过程品质、系统精度、动态响应能力等。
我们在实际应用过程中,可以分静态设计和动态设计两步进行,这里主要阐述动态设计。
伺服系统动态性能指标伺服系统的动态设计的目的是通过选择适当的控制算法,以使系统的闭环特性满足伺服系统的主要性能指标:稳定裕量。
伺服带宽和过渡过程品质、系统截至频率跟踪误差。
结构谐振特性。
机械传动间隙。
在实际雷达伺服系统中,采用最优控制尽可能的缩短伺服系统的过渡时间,由于最优控制基于的被控对象模型不准确,对框架角速度估计又存在误差,而PID控制对于稳态控制更占优势,因此,实际天线伺服控制中需要采用集成控制策略将最优控制器与经典PID控制器有机结合起来。
控制器交接策略:当小范围稳定时采用PID控制;大角度范围转移时采用了最优控制。
伺服系统固有环节伺服系统的固有环节主要是指执行元件及其负载,当执行元件及其负载的传递函数的输入是功率放大器的输入电压,输出是天线轴上的转角。
通常我们用动态分析仪来测试伺服系统固有环节的频率特性,通过Matlab对测得的数据进行频率特性分析。
得到系统固有环节传递函数:其中:为开环增益;为转折时间,为自然频率;为阻尼比经典PID控制设计系统模型建立伺服系统固有环节为“积分+一阶惯性+二阶振荡”形式,为保证系统的指令跟踪精度,控制器采用“一阶滞后超前+PI”形式。
雷达伺服系统多电机速度同步和防滑设计探讨摘要:雷达伺服系统是一种由电机驱动的位置控制系统,在雷达跟踪过程中,需要对伺服系统的跟踪精度、跟踪速度和稳定度等指标进行控制。
由于雷达伺服系统通常采用多个电机驱动,而且需要同时对多个目标进行跟踪,所以对雷达伺服系统的多电机速度同步和防滑设计提出了较高的要求。
目前,很多雷达伺服系统中采用了多种控制方法,如速度同步控制、PID控制等,这些方法都是从提高整个雷达伺服系统的精度和稳定性角度出发。
本文将重点从提高单个电机的调速精度、减少单个电机速度同步误差以及减少多个电机的速度不同步误差三个方面探讨多电机速度同步和防滑设计。
关键词:雷达伺服系统;多电机速度同步;防滑设计雷达伺服系统是一种用于跟踪和测量目标的电子设备。
它通过控制雷达天线和其他设备上的电机,使这些电机按照特定的信号速度同步运行,从而实现对目标的精确跟踪和测量。
在雷达伺服系统中,多电机速度同步和防滑设计是至关重要的。
如果这些设计不佳,可能会导致雷达伺服系统出现抖动、漂移等问题,影响其性能和精度。
1.同步控制技术多电机同步控制,是指在同一时刻,多个电机的转速保持同步,即各个电机的转速为同一时刻。
同步控制技术主要有基于PID的同步控制、基于自学习PID的同步控制以及基于模糊逻辑的同步控制等。
基于PID的同步控制主要有双速电动机同步控制和无极速度调节器的无速度传感器PID同步控制等;基于自学习PID的同步控制主要有自适应自调整PID、自适应比例-积分-微分(PID-derivative)、自适应调节比例-积分-微分(PID-derivative)等;基于模糊逻辑的同步控制主要有模糊自调整PID、模糊自调整比例-积分-微分(PID-derivative)等;基于模糊逻辑的同步控制主要有模糊自适应PID、模糊自适应比例-积分-微分(PID-derivative)、模糊自适应调节比例-积分-微分(PID-derivative)等。
雷达位置伺服系统校正班级: 0xx班学号: xx姓名: xx指导老师: x老师—2011.12雷达位置伺服系统校正一、雷达天线伺服控制系统(一) 概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
图1-1 雷达天线伺服控制系统原理图(二) 系统的组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、执行机构。
以上部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析: 1、受控对象:雷达天线; 2、被测量:角位置m θ;3、给定值:指令转角*m θ;4、传感器:由电位器测量m θ,并转化为U ;5、控制器:放大器,比例控制;6、执行器:直流电动机及减速箱。
天气雷达简介一、概述天气雷达是探测大气中气象变化的千里眼、顺风耳。
天气雷达通过间歇性地向空中发射电磁波 (脉冲),然后接收被气象目标散射回来的电磁波(回波) ,探测400 多千米半径范围内气象目标的空间位置和特性,在灾害性天气,尤其是突发性的中小尺度灾害性天气的监测预警中发挥着重要的作用。
天气雷达主要由天线、馈线、伺服、发射机、接收机、信号处理、产品生成、显示终端等组成。
天线:发射/ 接收电磁波馈线:传导电磁波伺服:天线等的运转发射机:产生电磁波接收机:接收处理电磁波信号处理:处理回波信息产品生成:根据算法,生成应用产品/控制雷达显示终端:显示产品、控制雷达目标距离的测定:由电磁波的传播速度(近似v=c) 和探测脉冲与回波信号之间的时间间隔△ t来确定。
r=c △ t /2 (1.1) 通常,时间间隔以卩s为单位,故上式可写成:r=0.15 △ t(km)或r=150 △ t (m) (1.2)目标方位角和仰角的测定:目标的方位角和仰角的测定是依靠天线的方向性来实现的。
天气雷达的天线具有很强的方向性,它能将探测脉冲的能量集中地向某一方向发射。
同样,它也只能接收沿同一方向来的回波信号。
所以,只有当天线对准目标时,才能接收到目标的回波信号。
根据这一原理,当发现目标时,天线所在的方位角和仰角就是目标相对于雷达的方位角和仰角。
目标特性的测定: 气象目标对雷达电磁波的散射是雷达探测大气的基础。
降水回波:云、降水粒子的散射。
随相态、几何形状不同而异,雷达回波功率是由有效照射体积内所有气象目标产生的。
晴空回波:在大气中的无云区或很小粒子所组成的云区探测到回波。
气象条件两种:一是大气中存在折射指数不均匀的区域,即湍流大气造成了对雷达波的散射;二是分层大气中存在折射指数垂直梯度很大的区域,即大气对雷达波造成了镜式反射。
多普勒速度探测:多普勒雷达发射出的电磁波,遇到运动的目标物后,返回信号产生频率漂移,从而可导出目标物相对于雷达运动的径向速度。
雷达天线伺服控制系统
雷达是一种通过将电磁波辐射向目标物体并接收反射波来检测其位置和速度的设备。
雷达天线是雷达系统的重要组成部分,它将电磁波辐射出去,并接收目标物体反射回来的
信号。
雷达天线伺服控制系统的主要作用是使雷达天线保持在目标物的方向上,并能够跟
随目标物的运动轨迹进行调整。
雷达天线伺服控制系统由电机、编码器、控制器等组成。
电机通过传动系统控制雷达
天线的角度,编码器用于反馈雷达天线的角度信息,控制器则根据编码器反馈的信息,控
制电机的转动并保持天线的位置与目标物保持一致。
雷达天线伺服控制系统的优点是精度高、反应迅速、可靠性强、适应性好。
该系统可
以根据各自的需求设置不同的工作模式,以适应不同复杂的环境条件。
当雷达天线工作在
垂直方向的情况下,需要较高的精确度和控制灵敏度。
当雷达天线工作在水平方向时,需
要更快的相应速度和更小的误差范围。
在这种系统中,控制器是枢纽和核心,它对电机、编码器和其他传感器进行信号的采集、处理、分析和判断,并输出控制命令,实现天线角度的控制和跟随。
此外,控制器还
可以提供反馈信息和故障报警标志,对系统的安全性和稳定性起到重要的作用。
总之,雷达天线伺服控制系统具有重要的作用。
这种系统可以确保雷达天线达到准确、快捷、灵活的聚焦目标物的能力,以满足人们对雷达设备的多种应用需求。
为了达到最佳
的工作效率和性能,该系统必须受到严格的质量控制和保养,以保证其安全性和可靠性。
![[知识]天气雷达简介](https://uimg.taocdn.com/9dfdb3fa0875f46527d3240c844769eae009a32e.webp)
天气雷达简介一、概述天气雷达是探测大气中气象变化的千里眼、顺风耳。
天气雷达通过间歇性地向空中发射电磁波(脉冲),然后接收被气象目标散射回来的电磁波(回波),探测400多千米半径范围内气象目标的空间位置和特性,在灾害性天气,尤其是突发性的中小尺度灾害性天气的监测预警中发挥着重要的作用。
天气雷达主要由天线、馈线、伺服、发射机、接收机、信号处理、产品生成、显示终端等组成。
天线:发射/接收电磁波馈线:传导电磁波伺服:天线等的运转发射机:产生电磁波接收机:接收处理电磁波信号处理:处理回波信息产品生成:根据算法,生成应用产品/控制雷达显示终端:显示产品、控制雷达目标距离的测定:由电磁波的传播速度(近似v=c)和探测脉冲与回波信号之间的时间间隔Δt来确定。
r=c Δt /2 (1.1)通常,时间间隔以μs为单位,故上式可写成:r=0.15Δt(km)或r=150Δt (m) (1.2)目标方位角和仰角的测定:目标的方位角和仰角的测定是依靠天线的方向性来实现的。
天气雷达的天线具有很强的方向性,它能将探测脉冲的能量集中地向某一方向发射。
同样,它也只能接收沿同一方向来的回波信号。
所以,只有当天线对准目标时,才能接收到目标的回波信号。
根据这一原理,当发现目标时,天线所在的方位角和仰角就是目标相对于雷达的方位角和仰角。
目标特性的测定:气象目标对雷达电磁波的散射是雷达探测大气的基础。
降水回波:云、降水粒子的散射。
随相态、几何形状不同而异,雷达回波功率是由有效照射体积内所有气象目标产生的。
晴空回波:在大气中的无云区或很小粒子所组成的云区探测到回波。
气象条件两种:一是大气中存在折射指数不均匀的区域,即湍流大气造成了对雷达波的散射;二是分层大气中存在折射指数垂直梯度很大的区域,即大气对雷达波造成了镜式反射。
多普勒速度探测:多普勒雷达发射出的电磁波,遇到运动的目标物后,返回信号产生频率漂移,从而可导出目标物相对于雷达运动的径向速度。
一种雷达天线伺服系统的控制实现方式熊文芳;施治国;袁君【摘要】随着相控阵雷达的广泛应用,雷达天线工作方式从圆周扫描到目标跟踪扫描切换的需求越来越普遍。
为了减少切换过程中的时间损失,保证对目标的连续稳定跟踪,本文提出了一种兼容速度控制与位置控制的伺服系统实现方式,有效缩短了切换时间。
%With thewidely application of the phased array radar,the need of working mode of the radar antenna which switched from the circumferential scan to the target tracking scan is also increasing.In order to reduce the time loss during the switching process and ensuring continuous and stable tracking of targets,this paper presents a method of realizing the servo system with speed control and position control,which shorten the switching time effectively.【期刊名称】《电子测试》【年(卷),期】2016(000)016【总页数】2页(P29-30)【关键词】相控阵雷达;伺服系统;天线扫描方式;速度控制;位置控制【作者】熊文芳;施治国;袁君【作者单位】荆州南湖机械股份有限公司,434000;荆州南湖机械股份有限公司,434000;荆州南湖机械股份有限公司,434000【正文语种】中文伺服系统为雷达的基本组成部分,一般情况下,对空搜索情报雷达天线作360°圆周扫描,圆周扫描时多采用速度控制方式,实现对天线旋转速度的控制。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图1.2 系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
雷达中伺服驱动单元设计应用摘要:雷达伺服分系统包括天线方位伺服部分和天线俯仰伺服部分。
伺服分系统的方位驱动分机和俯仰驱动分机内,都有一个结构和原理完全相同的控制器。
它由可控硅触发器、输出电流、电压采样以及反馈电路电源电路等部分组成。
天线方位伺服部分的作用,是手动或计算机操纵天线,将天线调定在0°~360°范围内的任意给定位置上,均能实现天线1~3r/min自动环扫(PPI状态),通过计算机可改变天线的转速。
天线俯仰伺服分机的作用,是手动或计算机操纵天线,将天线调定在0°到88°范围内的任意给定的位置上,均能实现天线1°~360°范围内自动俯仰(RHI状态),通过计算机可改变自动俯仰的速度及扫描范围。
关键词:雷达伺服天线方位俯仰1 雷达伺服分系统概述雷达伺服分系统包括天线方位伺服部分和天线俯仰伺服部分。
天线方位伺服部分的作用,是手动或者计算机操纵天线,将天线调定在0°~360°范围内的任意给定位置上,均能实现天线1~3r/min自动环扫(PPI状态),通过计算机可改变天线的转速。
在应急工作时,天线可实现1~1.5r/min连续自动环扫。
天线俯仰伺服分机的作用,是手动或计算机操纵天线,将天线调定在0°~88°范围内的任意给定的位置上,均能实现天线1°~360°范围内自动俯仰(RHI状态),通过计算机可改变自动俯仰的速度及扫描范围。
在应急工作时,天线可向上或向下改变俯仰位置。
在伺服分系统中,除了由同步机等构成的位置环外,还有速度环、电流环以及电压环。
速度环的信号由方位测速发电机的电枢绕组产生,在系统中产生阻尼信号。
电流环的电流信号是由套在功率放大器输出至方位执行电机电枢导线上的电流传感器产生的。
电压环的电压信号是电机电枢两端的电压,通过电压传感器所产生。
在系统中称为电压反馈信号。
2 伺服系统在雷达中的设计应用在雷达整机中,伺服驱动分系统是必不可少的。
伺服系统的分类和特点一、引言伺服系统,作为现代工业自动化的重要组成部分,其性能和特点在很大程度上决定了整个系统的性能和稳定性。
伺服系统能够根据输入的指令信号,自动、快速、准确地控制执行机构的位移、速度和加速度,实现对目标值的精确跟踪。
本文将对伺服系统的分类和特点进行详细的阐述,以便更好地理解和应用伺服系统。
二、伺服系统的分类伺服系统可以根据工作原理和应用领域进行分类。
1.根据工作原理分类根据工作原理,伺服系统可以分为电气伺服系统和液压伺服系统两大类。
其中,电气伺服系统又可以分为直流伺服系统和交流伺服系统。
(1)直流伺服系统:直流伺服电机由定子、转子、电刷和换向器等部分组成。
其工作原理是当电流通过励磁绕组和电枢绕组时,产生磁场,驱动转子旋转。
直流伺服电机具有调速范围广、低速性能好、响应速度快等优点,但同时也存在维护成本高、易磨损等缺点。
(2)交流伺服系统:交流伺服电机由定子、转子和编码器等部分组成。
其工作原理是通过控制电机的输入电压或电流,改变电机的旋转速度和方向。
交流伺服电机具有效率高、可靠性高、维护成本低等优点,但同时也存在调速范围较窄、低速性能较差等缺点。
2.根据应用领域分类根据应用领域,伺服系统可以分为工业伺服系统和航空伺服系统两大类。
(1)工业伺服系统:工业伺服系统主要用于工业自动化生产线、数控机床、包装机械等领域。
其特点是要求精度高、稳定性好、可靠性高、响应速度快等。
常见的工业伺服系统有电机驱动控制系统、气压传动控制系统和液压传动控制系统等。
(2)航空伺服系统:航空伺服系统主要用于航空器自动驾驶系统、雷达天线控制系统等领域。
其特点是要求精度高、可靠性极高、响应速度快、抗干扰能力强等。
常见的航空伺服系统有舵机控制系统、燃油控制系统等。
三、伺服系统的特点1.精度高:伺服系统的输出量能够精确地跟踪输入指令信号,从而实现高精度的位置控制和速度控制。
2.快速响应:伺服系统具有快速的动态响应特性,能够迅速跟踪输入信号的变化,保证系统的稳定性和动态性能。
WRK200型天气雷达的常见故障分析与总结作者:范凯波来源:《现代信息科技》2018年第08期摘要:天气雷达在航空气象领域一直发挥着重要作用。
民航华东空管局引进的WRK200型C波段双偏振多普勒天气雷达为上海虹桥、浦东两场的航空气象短临预报以及监测预警提供了重要参考。
自2014年建成投入使用以来,该雷达出现过发射放大单元故障、灯丝电源故障、固态调制器故障以及伺服系统故障等几次典型故障案例,本文通过总结分析现有故障案例,为天气雷达维护维修机务工作提供技术经验和参考。
关键词:航空气象;天气雷达;典型故障;维护维修中图分类号:P412.25 文献标识码:A 文章编号:2096-4706(2018)08-0063-03Abstract:Weather radar has been playing an important role in aviation meteorology. TheWRK200 C band dual polarization Doppler weather radar introduced by the East China Civil Aviation Administration of Civil Aviation has provided an important reference for the short term forecast of aeronautical meteorology and monitoring and warning in Hongqiao and Pudong,Shanghai. Since it was put into use in 2014,the radar has appeared several typical failure cases such as the fault of transmitting and amplifying unit,the fault of the filament power supply,the fault of the solid-state modulator and the fault of the servo system. By summarizing and analyzing the existing fault cases,this paper provides the technical experience and reference for the maintenance and maintenance work of the weather radar.Keywords:aviation meteorology;weather radar;typical faults;maintenance and repair0 引言在航空领域,气象因素对飞行安全一直是重要的影响因子。