雷达伺服系统设计与仿真
- 格式:doc
- 大小:16.50 KB
- 文档页数:4
270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
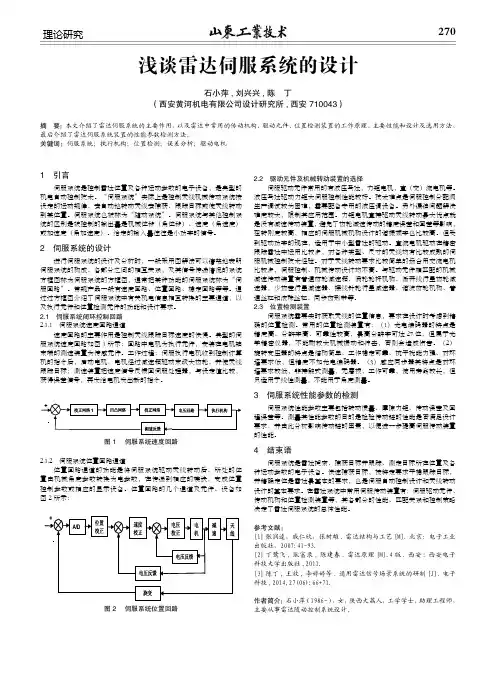
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
雷达位置伺服系统校正班级: 0xx班学号: xx姓名: xx指导老师: x老师—2011.12雷达位置伺服系统校正一、雷达天线伺服控制系统(一) 概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
图1-1 雷达天线伺服控制系统原理图(二) 系统的组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、执行机构。
以上部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析: 1、受控对象:雷达天线; 2、被测量:角位置m θ;3、给定值:指令转角*m θ;4、传感器:由电位器测量m θ,并转化为U ;5、控制器:放大器,比例控制;6、执行器:直流电动机及减速箱。
舰载火控雷达交流伺服系统仿真分析1.引言:介绍舰载火控雷达交流伺服系统和其重要性,同时介绍仿真分析的重要性和本文的研究目的。
2.系统概述:介绍舰载火控雷达交流伺服系统的功能和构成,讲解各个部分的作用及其工作原理,以及各个部分之间的关系。
3.数学模型:建立舰载火控雷达交流伺服系统的数学模型,并详细介绍模型各个部分包括传输模型、控制模型以及实际模型,以及这些模型的数学形式和物理意义。
4.仿真分析:基于建立的数学模型,使用Simulink建立舰载火控雷达交流伺服系统的仿真模型,对系统进行仿真分析,包括系统稳定性、系统响应速度、控制效果等指标的分析,并考虑与实际系统的误差。
5.结论和展望:总结本文的研究工作,分析仿真结果,提出结论,同时展望未来可能的改进和研究方向,为舰载火控雷达交流伺服系统的优化提供帮助。
第一章节是引言,主要介绍舰载火控雷达交流伺服系统的重要性以及本文的研究目的。
现代军事技术的快速发展和日益增强的国家安全要求,使得军事装备的精度和效率要求越来越高。
舰载火控雷达在现代军舰中扮演着重要的角色,能够对来袭目标进行探测和跟踪,并进行精确打击。
而舰载火控雷达交流伺服系统则是控制火控雷达瞄准机构的重要部件,直接影响着系统响应速度、稳态误差和动态误差等指标。
为了提高舰载火控雷达交流伺服系统的性能、优化系统结构,需要进行仿真分析来对系统进行评测和优化。
这种仿真分析的有效性在过去的研究中已被证明。
与其他测试和优化方法相比,仿真分析具有便利性和经济性,能够建立多种场景并对不同参数组合进行测试,以最小的代价实现全面的测试。
本文的研究目的是基于舰载火控雷达交流伺服系统的数学模型,建立系统的仿真模型,并对系统进行仿真分析。
通过对系统的仿真分析,评测系统在不同条件下的性能指标,比如系统响应速度、稳态误差和动态误差等指标,并与实际系统的误差进行对比分析。
最终,从模型分析的角度考虑如何优化系统的结构和性能,从而提高系统的效率和精度。
雷达伺服电气控制系统建模与仿真1.前言1.1雷达的概念雷达的基本概念形成于20世纪初。
但是直到第二次世界大战前后,雷达才得到迅速发展。
早在20世纪初,欧洲和美国的一些科学家已知道电磁波被物体反射的现象。
1922年,意大利G.马可尼发表了无线电波可能检测物体的论文。
美国海军实验室发现用双基地连续波雷达能发觉在其间通过的船只。
1925年,美国开始研制能测距的脉冲调制雷达,并首先用它来测量电离层的高度。
30年代初,欧美一些国家开始研制探测飞机的脉冲调制雷达。
1936年,美国研制出作用距离达40公里、分辨力为457米的探测飞机的脉冲雷达。
1938年,英国已在邻近法国的本土海岸线上布设了一条观测敌方飞机的早期报警雷达链1.2雷达伺服系统的提出雷达伺服系统是雷达最重要的组成部分之一,对雷达伺服系统的研制是整个雷达系统中科技含量较高,技术难度较大,并具有很强技术创新的重点课题,本文从某着陆雷达伺服系统的工作原理出发,再结合现代机械原理中关于执行系统运动方案设计的一些特点和这些特点在对雷达伺服系统运动方案设计方面的应用,进行尝试性的探讨.旨在通过探讨能够达到并揭示在设计雷达伺服系统运动方案过程中,所遵循的次序和设计构思方面的规律性以高压液体作为驱动源的伺服系统。
液压伺服系统是由液压动力机构和反馈机构组成的闭环控制系统?分为机械液压伺服系统和电气液2.雷达伺服电气控制系统建模与仿真2.1雷达赐福电气系统的环路设计介绍雷达天线伺服机构是伺服系统的重要组成部分,在系统中,它既是一个被控对象又是一个反馈系统,是天线或者光学、电视及红外线跟踪装置的支撑和指向装置。
当天线工作时,伺服机械机构中的驱动装置接受伺服系统执行元件的力矩传递,使天线和其他跟踪装置能够按照给定角速度及角加速度运动,准确指向目标。
根据天线伺服系统反应快、运动迅速、精确度高的特点,对伺服机构结构形式和性能都有较高要求。
图2.1俯仰控制系统框图2.2电气控制系统模型的建立及分析2.2.1直流电动机的数学建模图2.2.1电机模型框图本文俯仰电气控制系统的参数如下表2.2.2控制系统的设计1.电流环的设计2.速度环的设计图2.2.2速度环系统框图3.位置环的设计。
基于TMS320F28335的雷达伺服系统的设计与实现李红卫,刘昊,李勇臻(中国电子科技集团公司第二十七研究所,河南郑州450047)摘要:以TMS320F28335为核心,设计了一种高可靠性的雷达伺服系统。
描述了伺服系统的组成及其工作原理,重点讨论了伺服控制器的设计,分析系统的安全控制策略,并给出具体实现的控制电路。
实践表明:系统具备精度高、稳定性好、可靠性高、易调试等特点。
关键词:伺服系统;控制器;TMS320F28335;安全控制策略中图分类号:TP271文献标识码:A文章编号:1674-6236(2013)01-0170-03Design and implementation of a radar servo system based on TMS320F28335LI Hong -wei ,LIU Hao ,LI Yong -zhen(The 27th Research Institute ,CETC ,Zhengzhou 450047,China )Abstract:It takes the chip TMS320F28335as the core to design a high -reliability radar servo system.The principle and structure of the servo system are described ,The design of the servo controller is mainly discussed ,The safety control strategy is analyed and the detail circuit diagram of which is given out.The result indicates the system has excellent characteristics in terms of precision ,stability ,reliability ,and it ’s easy to adjust.Key words:servo system ;controller ;TMS320F28335;safety control strategy收稿日期:2012-09-21稿件编号:201209155作者简介:李红卫(1978—),男,河南焦作人,工程师。
雷达中伺服驱动单元设计应用摘要:雷达伺服分系统包括天线方位伺服部分和天线俯仰伺服部分。
伺服分系统的方位驱动分机和俯仰驱动分机内,都有一个结构和原理完全相同的控制器。
它由可控硅触发器、输出电流、电压采样以及反馈电路电源电路等部分组成。
天线方位伺服部分的作用,是手动或计算机操纵天线,将天线调定在0°~360°范围内的任意给定位置上,均能实现天线1~3r/min自动环扫(PPI状态),通过计算机可改变天线的转速。
天线俯仰伺服分机的作用,是手动或计算机操纵天线,将天线调定在0°到88°范围内的任意给定的位置上,均能实现天线1°~360°范围内自动俯仰(RHI状态),通过计算机可改变自动俯仰的速度及扫描范围。
关键词:雷达伺服天线方位俯仰1 雷达伺服分系统概述雷达伺服分系统包括天线方位伺服部分和天线俯仰伺服部分。
天线方位伺服部分的作用,是手动或者计算机操纵天线,将天线调定在0°~360°范围内的任意给定位置上,均能实现天线1~3r/min自动环扫(PPI状态),通过计算机可改变天线的转速。
在应急工作时,天线可实现1~1.5r/min连续自动环扫。
天线俯仰伺服分机的作用,是手动或计算机操纵天线,将天线调定在0°~88°范围内的任意给定的位置上,均能实现天线1°~360°范围内自动俯仰(RHI状态),通过计算机可改变自动俯仰的速度及扫描范围。
在应急工作时,天线可向上或向下改变俯仰位置。
在伺服分系统中,除了由同步机等构成的位置环外,还有速度环、电流环以及电压环。
速度环的信号由方位测速发电机的电枢绕组产生,在系统中产生阻尼信号。
电流环的电流信号是由套在功率放大器输出至方位执行电机电枢导线上的电流传感器产生的。
电压环的电压信号是电机电枢两端的电压,通过电压传感器所产生。
在系统中称为电压反馈信号。
2 伺服系统在雷达中的设计应用在雷达整机中,伺服驱动分系统是必不可少的。
某型三坐标雷达交流伺服系统设计一、绪论1.1 研究背景和意义1.2 其他人工智能领域交流伺服系统的发展现状和趋势 1.3 本文研究目的和内容1.4 研究方法和思路二、系统组成和工作原理2.1 三坐标雷达基本原理2.2 交流伺服系统组成2.3 交流伺服系统工作原理三、系统硬件设计3.1 控制器选型3.2 传感器选型3.3 执行机构选型3.4 硬件接口设计四、系统软件设计4.1 控制算法设计4.2 控制程序设计4.3 控制界面设计4.4 控制模块调试和调整五、系统性能评价5.1 系统测试设计5.2 实验结果分析5.3 系统性能评价5.4 系统存在的问题和优化方案六、结论与展望6.1 研究成果总结6.2 存在问题和改进方向6.3 对未来发展的展望6.4 感谢和致谢第一章节:绪论1.1 研究背景和意义近些年来,随着自动化技术、计算机技术和人工智能技术的发展,交流伺服系统在很多领域得到了广泛应用。
交流伺服系统是一种能够根据要求精确控制系统位置、速度和加速度的控制系统,其主要应用于机器人、数控机床、电动车辆、航空航天等领域。
而在雷达测量中,三坐标雷达是将三个方向的角度信息进行采集和组合的一种测量设备。
三坐标雷达的测量精度高、速度快、自动操作能力强,能够实现机器人和机械臂的精准定位、抓取等动作。
交流伺服系统与三坐标雷达结合,可以实现三坐标雷达在自动控制下的运动控制,从而完成更加精准的测量。
因此,研究交流伺服系统在三坐标雷达中的应用具有重要意义。
1.2 其他人工智能领域交流伺服系统的发展现状和趋势交流伺服系统作为自动化控制领域的重要技术,其在人工智能领域的应用也越来越广泛。
在自动驾驶、机器视觉、机器人等领域,交流伺服系统可以实现对汽车车速、图像良好性和机器人动作的更加精准的控制。
同时,在机器人领域,交流伺服系统还可以实现机器人精准的运动控制,从而提升机器人的抓取、装配、焊接等任务的完成度。
1.3 本文研究目的和内容本文旨在研究交流伺服系统在三坐标雷达中的应用,具体研究内容如下:1. 介绍交流伺服系统的基本原理、组成和工作原理;2. 设计交流伺服系统在三坐标雷达控制中的硬件和软件;3. 在实验中测试交流伺服系统在三坐标雷达控制中的性能表现;4. 对交流伺服系统在三坐标雷达控制中存在的问题和优化方案进行探讨。
雷达伺服系统设计与仿真
作者:陈静
来源:《城市建设理论研究》2013年第29期
摘要:雷达伺服系统是自动控制理论的典型应用,本文主要介绍了雷达伺服系统的论证、设计过程和方法,阐述了以传递函数为基础的经典控制理论和现代控制理论,基于对雷达伺服系统的设计研究,对伺服系统进行仿真和性能评估,总结了分析和提高伺服系统性能的方法。
关键词:伺服系统设计过程仿真和性能评估控制理论
中图分类号:TN95 文献标识码:A
伺服系统设计
伺服系统的设计方法通常有时间响应分析方法、根轨迹法和频率响应分析法三种。
伺服系统设计的主要技术指标有:工作范围、稳定性、过渡过程品质、系统精度、动态响应能力等。
我们在实际应用过程中,可以分静态设计和动态设计两步进行,这里主要阐述动态设计。
伺服系统动态性能指标
伺服系统的动态设计的目的是通过选择适当的控制算法,以使系统的闭环特性满足伺服系统的主要性能指标:
稳定裕量。
伺服带宽和过渡过程品质、系统截至频率
跟踪误差。
结构谐振特性。
机械传动间隙。
在实际雷达伺服系统中,采用最优控制尽可能的缩短伺服系统的过渡时间,由于最优控制基于的被控对象模型不准确,对框架角速度估计又存在误差,而PID控制对于稳态控制更占优势,因此,实际天线伺服控制中需要采用集成控制策略将最优控制器与经典PID控制器有机结合起来。
控制器交接策略:当小范围稳定时采用PID控制;大角度范围转移时采用了最优控制。
伺服系统固有环节
伺服系统的固有环节主要是指执行元件及其负载,当执行元件及其负载的传递函数的输入是功率放大器的输入电压,输出是天线轴上的转角。
通常我们用动态分析仪来测试伺服系统固有环节的频率特性,通过Matlab对测得的数据进行频率特性分析。
得到系统固有环节传递函数:
其中:为开环增益;为转折时间,为自然频率;为阻尼比
经典PID控制设计
系统模型建立
伺服系统固有环节为“积分+一阶惯性+二阶振荡”形式,为保证系统的指令跟踪精度,控制器采用“一阶滞后超前+PI”形式。
典型校正传递函数为:
其中,为校正环节的传递函数,为系统固有环节的传递函数。
选择系统开环截止频率
截止频率的选择是经典PID设计的关键。
它的大小影响系统的稳定裕量、跟踪精度和过渡过程品质要求。
其选择标准受到伺服带宽的限制:
,其中,
确定系统的开环特性
系统开环传递函数:,系统固有环节的传递函数通过仿真得到,见式(2.9)。
首先,根据“伺服系统动态性能指标”预估,然后通过MATLAB下的sisotool工具详细设计,得到系统开环频率特性,G.M.表示幅值裕度为,P.M.表示相位裕度为。
校正传递函数采用双线性离散化方法:,实现在离散系统进行数字控制。
最优控制设计
最优控制理论的基本思想:根据已建立的被控对象的数学模型,选择一个容许的控制律,使得被控对象按预定要求运行,并使给定的某一性能指标达到极小值(或极大值)。
从数学观点来看,最优控制理论是求解一类带有约束条件的泛函极值问题。
系统状态方程和初始条件
忽略系统的二阶环节,传递函数(2.9)简化为:
(2.12)
状态变量:状态方程:,
其中:,,,,,令,则系统状态方程为 (2.13)
对,控制量满足约束条件
设系统的初始状态为:,;末值状态为:,;性能指标(积分型:最小时间控制):。
最优控制的任务就是对所有,寻找一条最优控制规律
它满足条件,并能将系统由初始状态转移到末值状态,同时使性能指标即为极小。
最优控制设计思路
函数取极小值,得到最优控制
哈密顿函数:
由于,可以得到使函数的必为:
相轨迹图分析
采用控制规律时,由方程(2.13)解得
相轨迹为两族抛物线,相轨迹的最终收敛线:
,其中 (2.17)
根据状态点在相轨迹上位置的不同讨论最优控制轨迹
当系统控制量为或时,分别得到状态点、,在相轨迹上以这两个状态点为最优控制的起始状态,以控制规律,控制最终回到收敛线到达坐标原点。
状态点在相轨迹图上有可能出现在以下不同区域,如图2.10所示:
图2.10 最优控制设计图
图2.10中和为收敛线,、为控制量为时可能出现的曲线,、为控制量为时可能出现的曲线。
为当前控制不跨过收敛线的区域,为当前控制跨过收敛线的区域。
状态点在区域时,由或全加速拉回收敛线;
状态点在收敛线上时,按照收敛轨迹控制。
状态点在区域时,通过双点割线法求取适当的使状态点落在收敛线上.
伺服系统控制器仿真
由于伺服系统控制是由数字计算机实现,因此经典PID控制和最优控制集成控制器是由C 语言手工代码实现,在Simulink环境下采用S函数对C程序进行封装,嵌入到Simulink环境下进行仿真。
我们以方位通道为例,指令角为的阶跃,实测结果为只采用经典PID控制的响应曲线:超调,过渡过程时间,稳态误差为。
采用集成控制的阶跃响应曲线:超调,过渡过程时间,稳态误差
可见在大角度跳变时,PID控制器为了减小超调采用了限速处理,但是在过渡过程时间上达不到快速性,采用了集成控制以后,系统过渡过程品质满足了快速性和小超调量。
在实际伺服系统中,由于受到机械传动等结构因素的影响,得到的波形可能没有数字仿真理想化,在地面试验过程中,我们还加入了一些限制和保护,使伺服系统控制更加完善。
结论
本文系统地阐述了雷达伺服系统的论证、设计过程和方法,雷达伺服系统实现了数字伺服系统,应用的理论也不单单是沿用以往的经典控制论,还实现了现代控制理论(最优控制)在系统中的应用,本文把经典控制理论和现代控制理论有机结合起来应用到雷达伺服系统中,并使用MATLAB工具进行仿真和性能评估,论证了伺服系统从经典控制理论向现代控制理论的发展能够有效提高伺服系统的各项性能。