单枪环缝焊接专机DDDDD
- 格式:doc
- 大小:28.50 KB
- 文档页数:6

卧式单枪环缝焊接技术方案预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制CSW-600卧式单枪环缝焊接技术方案(编号:20110729B)编制:CSW-600卧式单枪环缝焊接专机技术方案一、设备用途:设备可以满足的焊接工件参数及焊接工艺要求(根据客户要求设计)1、工件直径范围:300-600mm,工件长度范围:≤1500mm;工件最大重量:≤200kg,材质:碳钢、不锈钢,材料厚度范围:2-6mm;2、工件先组对点焊;焊缝同心度、错边量不大于板厚的10%;3、焊前要去油污、锈蚀等杂物;4、焊接形式:单枪TIG+填丝焊、MIG/MAG焊5、夹具部分:专机配前花盘、后配尾顶,客户自配夹具6、重要提示:本方案没有配置焊缝跟踪器,对工件组对的同心度、平行度等尺寸精度要求较高,否则需要靠人工调整焊接过程,方能达到良好的焊接效果。
二、CSW-600环缝自动焊接机床示意图:CSW环缝焊接专机(实际为单枪)示意图(仅供说明方案用,实际以最终设计为准)(一)用途介绍CSW-600环缝自动焊接专用机床是针对环形焊缝施焊而设计的自动化焊接系统。
该系统由焊接机床、焊接电源(另配)、直柄焊枪(另配)及PLC控制系统所组成;适用于碳钢、不锈钢工件的环缝及环型角焊缝焊接。
(二)机床基本构成及参数该机床由底座、主动力驱动机构、龙门式焊枪支架及导轨、气动进枪机构及焊枪微调机构、可调式滚轮托架、气动尾顶、挡弧装置和进口LC控制系统所组成。
采用较低的床身,工件装卸方便,使用是稳定性能好。
将点焊装配好的工件放在滚轮托架上,前端有配花盘和用户提供的夹具夹紧,后端用气动尾顶或用户提供的夹具顶紧;根据焊接工艺调整好焊枪与水平旋转线的夹角,即可进行一系列焊接过程。
焊接完毕后,焊炬气动回位,气动夹紧同时松开,可卸下工件。
本机具有模拟及实焊等功能。
控制中心采用进口原装PLC控制。
1、机床底座:采用直线设计,以优质钢板焊接的框架结构,台面上安装有尾顶导轨。

移动式焊接专机
聂新刚;顾莹
【期刊名称】《机械工程师》
【年(卷),期】2013(000)002
【摘要】设计开发了一种焊接专机,用于专用产品焊接.分析了焊接专机系统的组成和工作原理,阐述了专机系统的工作过程,焊接专机保证了焊接过程的安全性、可控性和集成性,已实现应用在生产中.
【总页数】2页(P88-89)
【作者】聂新刚;顾莹
【作者单位】沈阳新松机器人自动化股份有限公司,沈阳110168;沈阳航空职业技术学院,沈阳110043
【正文语种】中文
【中图分类】TG434
【相关文献】
1.野外可移动式钻具耐磨带堆焊专机
2.视觉系统与焊接机器人在方形环缝焊接专机改造上的应用
3.视觉系统与焊接机器人在方形环缝焊接专机改造上的应用
4.焊接专机改造及其在台车架体焊接中的应用
5.MIG半自动焊焊接专机在铁路货车不锈钢制动管焊接中的应用技巧
因版权原因,仅展示原文概要,查看原文内容请购买。
焊接专机方案一、概述根据的招标技术要求提供本技术方案,自动氩弧焊机主要用于不锈钢、钛合金的自动氩弧焊接,设备型号:CWL-10-1800-TX-TIG,能实现直流TIG、直流脉冲TIG功能。
本系统主要由CWL-10-1800精密环缝车床、CBML-1.2×1.2-TC操作机、TX焊接控制器及手控盒、TVC自动弧长跟踪系统、T-OSC机械摆动系统、T-FEEDER四轮送丝机构、Maxstar-350逆变TIG焊接电源、自动TIG焊枪及其组件等组成。
✧设备布局:本系统采用模块化搭建方式,CWL-10-1800环缝焊接机床为主要机械执行单元,机床头尾座提供工件的夹持和焊接旋转。
CBML-1.2×1.2-TC操作机作为焊接机头载体,焊接机头安装在操作机横梁前端,并且在台车上设有电源、水箱、控制柜等部件的安装位置,操作机可沿轨道行走,并且在行程范围内任意位置锁定,轨道布置方向与CWL-10-1800环缝轴向平行。
通过调节操作台车位置和操作机横梁的高低和前后位置,实现焊接机头在待焊接头位置的粗定位。
✧机头分布:焊接机头安装在操作机横梁臂前端,焊接机头包括横向焊枪精确对中滑块1套(由T-OSC弧摆器滑块实现),垂直精确滑块1套(由TVC弧压跟踪系统滑块实现),水冷焊枪1把,焊丝角度调节机构1套。
焊接机头的前后定位通过操作机横梁伸缩实现。
✧控制系统:TX控制器是美国AMET公司开发的,在国内集成的,可集中控制焊接电流、电弧电压、摆动参数、送丝速度和环缝焊接速度的多通道、数字化焊接控制器。
TX作为系统核心控制器对系统各部分进行实时的、精密的过程控制,可满足环形焊缝的TIG焊接工艺要求。
✧设备安全性:系统设有水、气传感器,确保当水、气没有正常工作时不能起弧焊接。
系统的水、气、电接头均采用国际高端产品,确保安全、稳定。
安全防护符合国家通用技术条件和相应国际安全标准。
✧制造标准,本系统设计和制造均采用ISO国际标准,所有零、部件和各种仪表的计量单位采用国际单位(SI)标准;系统结构设计合理,具有足够的静态和动态稳定性,可长期稳定运行;所有驱动系统的执行元件精度高、可靠性好、响应速度快、定位准确;系统中涉及焊接动作的驱动电机,采用安川伺服电机。

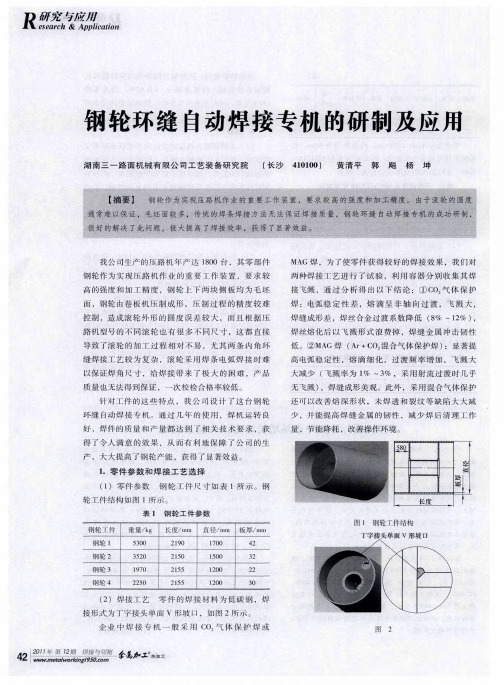
1原设备及加工工艺及所加工产品的缺陷1.1行业内典型的传统方形环缝焊接专机外形(如)。
1.2传统方形环缝焊接专机结构的组成“01”为焊枪前后左右上下调整机构,“02”为左气保焊焊枪,负责左侧端盖的焊接,“03”为右气保焊焊枪,负责右侧端盖的焊接,“04”为左侧推进座,内装伺服电机,“05”为左侧丝杆,“06”为左侧旋转座,内装伺服电机,负责产品的旋转,以便于焊枪进行焊接,“07”为左侧端盖安装工装,08”为产品的左侧端盖,产品装夹时,“08”左侧端盖安装在图1典型产品图图2方形环缝焊专机图3方形环缝焊专机产品与气保焊焊枪移动轨迹“17”为气保焊焊枪,“18”为产品筒体,“20”为焊丝,可以看到随着筒体的运转,气保焊焊枪枪口不能平行于筒体外形,这就导致了焊接缺陷。
③以上两项设备缺陷,经常会导致撞枪、气孔、漏焊、未熔合、未焊透、裂纹、咬边、凹坑、焊瘤等焊接缺陷,严重时会导致产品报废。
2我公司改进后的方形环缝焊机“21”为松下TM-1400型焊接机器人,及欧姆龙视觉系统FZ5-L350型摄像头,及配套光源,其余部分不变。
操作步骤为产品重复在原设备上的装夹、定位、合盖、旋转后,焊接机器人在视觉摄像头的指引下,对产品进行随形跟踪焊接。
2.2焊接机器人和视觉摄像头和光源系统(如图6)“22”为欧姆龙视觉系统FZ5-L350型摄像头,“23”为光源,“24”为气保焊枪,“25”为松下TM-1400型焊接机器动按程序控制,并能在三维空间完成各种复杂焊接作业的自动化生产设备,可以在恶劣的环境下连续工作,焊接质量,可以提高工作效率,极大的减轻工人操作强度。
本项目改造采用的是唐山松下生产的TM-1400接机器人,是一款6轴焊接机器人,作业半径为1.4有焊丝自动回抽、起弧重试、焊缝搭接、粘丝解除、摆动、平移+RT轴平移、显示运枪角度(焊枪姿态调整图4当产品旋转时气保焊焊枪枪口与产品间的位置图5改造后安装了视觉系统与焊接机器人的环缝焊机图6视觉焊接机器人系统图7视觉系统引导的控制界面[2]赵嘉华.焊接检验[M].机械工业出版社,2005.[3]马香峰.机器人机构学[M].机械工业出版社,1991.[4]王锐.焊接机器人控制系统研究分析[J].电子世界,2013(2):166-168.图8视觉系统控制下的气保焊枪图9视觉系统控制下的枪口位置。

管道全自动单枪外焊机1 A-305操作规程1机头及轨道1.1.1机头小车依靠小车行走轮夹持于环绕管道圆周上的淬火钢带上,并围绕管道行走。
机头小车有CW(顺时针侧)焊接和CCW(逆时针侧)焊接两种。
两个小车设置互为镜像,共用一个轨道在管道两边同时焊接。
1.1.2行走电机为机头小车围绕轨道运动提供驱动力,行走速度为每分钟0~1.5m。
角摆动装置步进电机通过一个传动装置使焊枪在坡口处进行角摆运动,平摆动装置使焊枪进行平移运动,摆动速度可达每分钟240 次(当摆动宽度为12.7mm 时)。
1.2 电源适配器1.2.1电源适配器的主要功能包括:第一,对系统的各个模块进行供电。
第二,气阀控制。
第三,对模拟焊接电源、数字化电源进行控制,完成焊接要求。
第四,对焊接过程的电流、电压实时采集。
1.2.2 焊接系统是由380V 交流电转为36V 直流电源来驱动。
1.3焊丝1.3.1焊接中需要安装1 盘焊丝在焊丝控制盒内,在平常工作时,应注意焊丝的使用情况,在焊丝将要被用完时,需停止焊接,更换焊丝。
1.3.2警告:在盘上绕圈焊丝时因为焊丝有弹性,有受伤的风险。
当放入焊丝盘时,应该固定住焊丝末端避免焊丝弹出时或焊丝盘滑落时受伤。
松开焊丝盘前,确定焊丝盘的紧固螺母在位。
否则,焊丝盘可能松落引起受伤。
握住焊丝一端时要提高警惕以防危险。
因为焊丝头锋利,很容易穿入手套和皮肤。
1.4保护气体1.4.1保护气体通常由数个钢瓶组成的歧管供气。
将数个钢瓶组成歧管供气,可以在需要更换时将单个钢瓶隔断并取下,不会中断焊接过程。
保护气体压力调节到合适值,通过保护气管与电源适配器相连。
1.5机头LED 指示灯1.5.1“WELD”(焊接)灯,焊接过程中,该LED灯亮起;焊接停止时,该LED 灯熄灭。
1.5.2“COMM”(通信)灯,系统连接正常时,该LED灯常亮1.6 A-305 遥控盒操作说明1.6.1▲(方向上键) 按住此键,干伸电机向上移动。
焊接专机安全操作规程(最新版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的安全管理制度,如通用安全、交通运输、矿山安全、石油化工、建筑安全、机械安全、电力安全、其他安全等等制度,想了解不同制度格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, this shop provides you with various types of safety management systems, such as general safety, transportation, mine safety, petrochemical, construction safety, machinery safety, electrical safety, other safety, etc. systems, I want to know the format and writing of different systems ,stay tuned!焊接专机安全操作规程1 焊接专机是生产的重点设备,操作员必须培训合格,持证上岗。
单枪环缝焊接专机DDDDD
1设备的用途及特点
1.1用途:
该焊接机床主要用于环缝数字控制M AG/C O2焊接。
可适用于圆型管和平板的端头焊接。
注:根据样品建议采用自填丝M AG焊接。
1.2特点:
以1台OTC公司的C P V E-350数字I G BT控制直流M A G 焊接电源及1套自动焊枪组成焊接单元。
以一台H Z-100H焊接工装专及控制箱组成焊接变位单元。
2主要技术参数
2.1焊接单元特点及技术参数
1.环缝自动焊,焊接层数1-3层,焊枪自动提升
2.工件长度,400-800m m,直径φ50-φ80
3.控制触摸屏P LC
2.2工装专机单元参数:
在工装上水平布置有1套动力装置,1个焊接工位,通
过切换工件的位
置位置来完工件
的焊接作业。
专业气动焊接卡具能快速准确地夹紧工件,交流步进电机提供动力带动工件沿设定好的行走轨迹及焊接参数对工件进行焊接作业。
全中文显示器文本,有作业集中控制、可靠性高、操作方便、简单易学。
焊接速度通过交流步进电机专用控制器变频调速控制。
自动焊枪的进退由高精度T H K-N S K直线导轨气动/手动双驱动。
气动元件采用名牌公司产品。
专机以P LC为核心组成自动焊接控制系统。
要求工件焊前各单件紧配牢固,产品一致性高。
该专机有焊接质量好、性能稳定、操作方便、效率高等
优点。
选用该机既能提高劳动生产率、改善工人的工作环竟能提高产品质量的稳定性、可靠性
输入电源:AC220V50
H Z
输入总功率:0.78
K W
工件夹持范围:10-50
m m
工件长度夹持范围:50-800
m m
焊枪调整范围:轴-40Y轴-40
m m
焊枪有效行程:100
m m
焊枪重复定位精度:0.17
m m
工件行走速度:无级可调
工件夹紧方式:气动焊接卡具
整机重量:260KG
3工作原理
本自动焊接专机为数字控制M AG/C O2焊接设备,以A R+C O2气作为保护气体;将工件定位压紧,交流步进电机带动工件行走,焊枪引弧,焊枪行走、工件熔化使各单件接合起来,从而达到焊接的目的。
4机械系统
4.1床身:由钢板构件组成,有足够强度支撑其它部件。
4.2传动器:步进电机、减速器带动主轴驱动工件行走。
4.3焊枪调整机构:进行焊枪及送丝部件水平上下、角度的
调整。
5电器控制系统
5.1控制方式:自动,手动双向控制.
5.2自动焊接操作:启动专机——焊接(人工装配工件后)
即可完成自动焊接操作系统.(在遇到突发事件时可按急停按钮,待故障解决后,可按初始按钮重新焊接,)
5.3手动焊接操作:当控制方式打在手动操作时,高精度真
线气缸上、下、左、右手动控制,各种行走及焊接参数均可单独调节。
6工作过程
人工将工件放入夹具内装配好——人工启动焊接开关——自动卡紧工件——焊枪进枪——引弧焊接——工件行走——焊接完毕——焊枪退回——自动松开卡具——人工卸件——重复以上焊接工作流程。