液压同步顶升控制系统研究
- 格式:pdf
- 大小:254.86 KB
- 文档页数:2
桥梁同步顶升技术摘要:桥梁整体顶升技术的关键在于保证其上部结构的整体性同步顶升,本文主要介绍桥梁同步顶升技术。
关键词:PLC系统、同步顶升、监测传感、称重随着海河两岸改造工程的启动,位于市内跨海河的桥梁的改造开始提上议事日程,这些桥梁具有结构完整,功能完好等特点,部分桥梁更是见证了天津市的历史,但是这些桥梁由于建造时间比较长,已经显得不能满足城市进一步发展的需要,特别是通航高度的不足更是如此。
而采用同步顶升桥梁的上部结构是解决通航净空不足的一个很好的方法。
一方面这种方法能够不损坏现有桥梁结构,另一方面在顶升过程中能尽可能的减少中断交通的时间。
桥梁顶升的重点在于保持桥梁上部结构的完整性,要保证桥梁上部结构完整,方法就是保持桥梁上部结构在现有状况下同步顶升。
这就要求我们采用先进的技术方法----PLC控制液压千斤顶同步顶升系统。
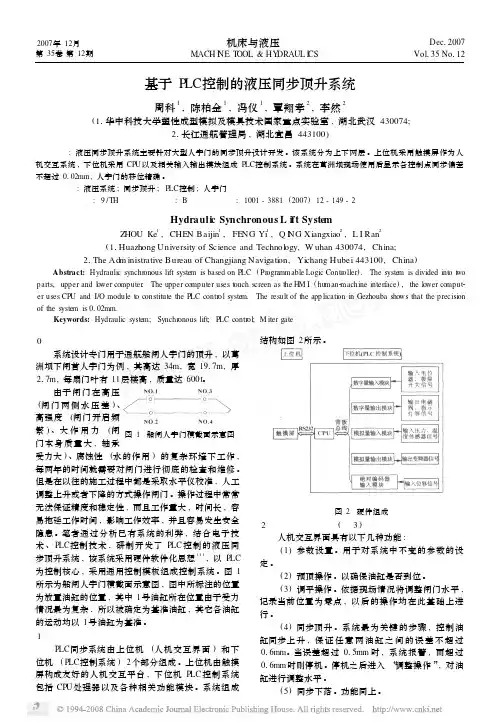
一、PLC系统工作原理PLC压控制液压同步系统由液系统(油泵、油缸等)、监测传感器、计算机控制系统等几个部分组成。
(一)液压系统液压系统由计算机控制,可以全自动完成同步位移,实现力和位移的控制、位移误差的控制、行程的控制、负载压力的控制;误操作自动保护、过程显示、故障报警、紧急停止功能;油缸液控单向阀可防止任何形式的系统及管路失压,从而保证负载有效支撑等多种功能。
该系统已在上海音乐厅整体顶升与平移工程中成功运用。
A2F型高压柱塞泵,单向阀、蓄能器、压力传感器及电磁溢流阀组成电子卸荷节能供油回路,稳定地为系统提供30.00-31.5 MPa的油压(尖峰压力值35Mpa)。
在每一个顶升缸的下腔接有减压阀,根据实测到的各顶荷重压力,将减压阀的零背压出口压力调至比实际荷重压力低2.0MPa;即减压阀的零背压出口压力=实测到的各顶荷重压力-2.0MPa。
减压阀共有三个油口;进油口、出油口、回油口,如果减压阀的调定压力为P0,而回油口的压力为Pc,则出油口的压力为Po+Pc,从图一可知回油口压力受比例伺服阀控制,当比例伺服阀的出口压力Pc 为2.0 Mpa时,顶升缸的总推力与顶升物的自重平衡,当Pc>2.0 MPa时顶升物将起升,而当Pc<2.0 MPa时顶升物将回落。
液压的同步技术探究液压技术在现代工业生产中扮演着非常重要的角色,它广泛应用于机械制造、汽车工业、航空航天等领域。
而液压同步技术则是液压技术中的一个重要方面,它能够实现多个执行器的同步运动,保证机器的运行精度和稳定性。
本文将对液压同步技术进行探究,从工作原理、应用领域、发展趋势等方面展开讨论。
液压同步技术,顾名思义,即利用液压作为动力源,通过一定的装置来实现多个执行器的同步运动。
液压同步技术的核心在于控制系统,它能够实时监测和调整各个执行器的运动状态,保证它们按照既定的轨迹和速度运动。
而实现液压同步技术的关键则在于控制系统的精准度和灵活性。
液压同步技术的工作原理主要包括液压控制阀、传感器、执行器等多个部分。
在液压系统中,通过液压控制阀来控制液压油的流动,从而实现对执行器的控制。
而传感器则用于实时监测执行器的位置和速度等参数,将这些信息反馈给控制系统。
控制系统则能够根据传感器的反馈信号实时调整液压控制阀的开启度,从而控制执行器的运动状态。
液压同步技术在工业生产中有着广泛的应用。
在数控机床中,利用液压同步技术可以实现多个轴的同步运动,从而保证加工零件的精度和表面质量。
在汽车制造中,液压同步技术可以用于实现车身各部位的压实和成形,提高生产效率和产品质量。
在航空航天领域,液压同步技术可以用于控制飞机的襟翼、襟翼等部件的运动,保证飞机的飞行性能。
随着信息技术的发展,液压同步技术也在不断创新和发展。
利用传感器和控制系统之间的信息交互,可以实现对液压系统的远程监控和调整,提高了液压系统的智能化水平。
利用先进的控制算法和软件,可以实现对液压系统的模拟仿真和优化设计,提高了液压系统的工作精度和稳定性。
液压同步技术作为液压技术中的重要组成部分,具有非常重要的意义。
它可以实现对多个执行器的同步控制,保证了工业生产中机器的运行精度和稳定性。
随着工业自动化水平的不断提高,液压同步技术的应用领域也在不断扩大,发展前景非常广阔。
连续顶升液压控制系统仿真分析与验证周玉伟章青石云飞天津大学机械工程学院,天津,300350摘要:针对大型结构物连续同步顶升技术原理,使用四桩腿支点、每个桩腿支点4个顶升油缸的支撑结构;单支点内采用基于同步分流液压泵的容积同步控制方式;支点间采用基于位移模糊的多点主从同步控制方式。
建立了基于同步分流液压泵的液压系统和基于位移模糊控制的控制系统的仿真模型并进行联合仿真。
对大型结构物连续同步顶升系统样机进行同步顶升试验,并对实验数据进行分析。
结果表明:受实际工况中各种因素所导致的误差影响,实际同步误差比仿真同步误差略大,但仍满足同步要求,验证了所设计的液压控制系统的应用可行性。
关键词:连续顶升;同步分流液压泵;位移模糊控制;液压控制系统仿真中图分类号:TP271.3DOI :10.3969/j.issn.1004⁃132X.2018.16.007开放科学(资源服务)标识码(OSID):Simulation and Verification of Hydraulic ControlSystems for Continuous LiftingZHOU YuweiZHANG QingSHI YunfeiCollege of Mechanical Engineering ,Tianjin University ,Tianjin ,300350Abstract :By the large scale structure continuous synchronous lifting technology ,the supporting structure with four jack⁃up points and each point with four jack⁃up hydraulic cylinders was used for the system.The volume synchronization control mode was applied in the single jack⁃up point based on syn⁃chronous split ⁃flow hydraulic pump.The multi ⁃point master ⁃slave control mode was used between the jack⁃up points based on displacement fuzzy control.The system based on synchronous split⁃flow hydrau⁃lic pump and displacement fuzzy control was modeled and simulated.The system prototype tests and the data analysis were completed.The results show that due to the various factors in the actual conditions ,the actual errors are bigger than the simulated one but still meet the requirements of synchronization.The re⁃sults validate the application feasibility of the hydraulic control systems.Key words:continuous lifting ;synchronous split⁃flow hydraulic pump ;displacement fuzzy control ;simulation of hydraulic control system收稿日期:2017-05-05基金项目:天津市海洋经济创新发展区域示范项目(CXSF2014-13,CXSF2014-01)0引言随着社会科技与经济的快速发展,人类对能源的需求量日益增大,而陆上常规油气资源逐渐枯竭,于是全球油气业界将目光投向了海洋[1]。
摘要加热炉是将物料或者工件加热的设备。
在冶金工业中加热炉习惯上指把金属加热到轧制成锻造温度的工业炉。
步进梁式再加热炉是连轧生产线提供钢管再加热所有。
它是依靠专用的步进机械使工件在炉内移动的一种机械化炉子。
步进梁式加热炉设计一种连续式加热炉它是靠专用的步进机构,按照一定的轨迹运动,使炉内钢料一步一步地向前推进。
步进梁式加热炉炉底的结构和传动方式要根据出料的频率和炉子的生产能力决定,它要考虑被加工工件的尺寸参数和工地方面的尺寸大小。
所以必须严格计算其内部参数,保证炉子的生产和安全。
炉底机械采用双轮斜轨机构。
步进梁的升降和平移动作采用液压缸驱动。
加热炉炉床由固定梁和步进梁两部分组成,步进梁由双重轮对的多轴框架支撑,其外侧走轮由液压缸驱动,可以在倾斜轨道上滚动,使步进梁作上升或者下降运动。
上层托轮直接拖住步进梁,而步进梁则由另两个液压缸带动,实现平移运动。
关键词:步进梁式加热炉;步进梁;双轮斜轨式机构;液压传动AbstractHeating furnace is the material or workpiece heating equipment. In the metallurgical industry in the metal to heating habits heated to rolled into the industrial furnace temperature forging. Walking beam type furnace is provided to steel rolling line heating all again. It depend on special stepping machinery to make the work in the furnace stove a mechanized moving.Stepping beam furnace design a continuous reheating furnace of it is to rely on special stepping institutions, according to certain trajectory, making furnace of steel material within step forward.Step reheating furnace bottom structure and driving mode according to the material of the frequency and the production capacity of the stove, it should consider decision by the size of the machining parameters and the site of size. So must strictly calculation its internal parameters, guarantee the production and the stove safety.Furnace bottom machine adopts double inclined rail agencies. The rise and fall of walking beam by hydraulic cylinder for peace movement driven. Heating furnace bed by fixed girders and walking beam two parts, walking beam of by double round multiaxial framework, the lateral go round supported by hydraulic cylinder drive, can tilt orbit in rolling make walking beam rise or fall as sport. The upper roller direct tugged walking beam, and walking beam is driven by two other hydraulic cylinder, realize the shift movement.KeyWords:stepping beam furnace,walking beam,double inclined rail mon rail agencies,hydraulic transmission目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步进式加热炉 (1)1.1.1 步进式加热炉概述 (1)1.1.2 选题背景 (4)1.1.3 设计目的 (5)1.1.4 设计方案 (7)2 液压系统分析与设计 (9)2.1 运动与负载分析 (9)2.1.1 步进式加热炉原始数据 (9)2.1.2 步进式加热炉工况速度曲线设计 (9)2.1.3 计算稳态工作负载 (11)2.1.4 拟定液压原理图 (12)2.2 液压缸参数及其型号 (13)2.2.1 平移液压缸受力分析 (13)2.2.2 初选平移液压系统工作压力 (14)2.2.3 平移液压缸主要参数及其选取型号 (14)2.2.4 升降液压缸受力分析 (16)2.2.5 初选升降液压系统工作压力 (18)2.2.6 升降液压缸主要参数及其选取型号 (18)2.3 液压泵参数及其型号 (19)2.3.1 平移液压泵工作压力的确定 (19)2.3.2 平移液压泵流量的确定 (19)2.3.3 平移液压泵的选取 (20)2.3.4 升降液压泵工作压力的确定 (20)2.3.5 升降液压泵流量的确定 (20)2.3.6 升降液压泵的选取 (20)2.4 电动机参数及其型号 (21)2.4.1 平移液压系统电动机参数及其型号 (21)2.4.2 升降液压系统电动机参数及其型号 (21)2.5 液压阀件参数及其型号 (22)2.5.1 平移液压系统阀件参数及其型号 (22)2.5.2 升降液压系统阀件参数及其型号 (22)2.6 液压油管道的选择 (22)2.6.1 油管的选用 (22)2.6.2 液压油管管径的确定 (23)2.6.3 液压油管管壁厚的验算 (23)2.7 液压油管道的选择 (24)2.7.1 平移液压系统油箱有效容积 (24)2.7.2 升降液压系统油箱有效容积 (24)3 液压系统性能验算 (25)3.1 液压系统压力损失计算 (25)3.1.1 平移液压系统压力损失 (25)3.1.2 升降液压系统压力损失 (26)3.2 液压系统发热温升计算 (26)3.2.1 平移液压系统发热温升 (27)3.2.2 升降液压系统发热温升 (27)4 液压同步控制系统的设计 (29)4.1 控制系统 (29)4.1.1 电液比例位置控制系统 (29)4.1.2 设计方案 (30)4.1.3 传感器的选择 ..................................................... 错误!未定义书签。

PLC液压控制系统在桥梁整体同步顶升中的应用桥梁整体同步顶升概述桥梁的抗震性能是一个十分重要的指标,而一个重要的抗震性能指标就是能够在地震后消除桥梁的变形和扭转。
为了实现这个目标,桥梁整体同步顶升技术应运而生。
桥梁整体同步顶升指的是利用多个液压顶升装置对桥梁进行统一的升降,使桥梁整体升高,以实现桥梁的变形和扭转的消除。
在整个升降过程中,关键的是各个液压顶升装置必须同步运行,以避免因为一些顶升装置运行不正常导致整个顶升过程不同步。
PLC液压控制系统的应用为了实现液压顶升装置的同步运行,人们常常将PLC液压控制系统应用于桥梁整体同步顶升技术中。
PLC(Programmable Logic Controller,可编程逻辑控制器)是一种电子设备,它负责控制和监控各种机械和电子设备。
PLC的优势在于它的可编程性和可靠性强,在控制和监控各种机械和电子设备时有着广泛的应用。
对于桥梁整体同步顶升技术来说,PLC具有以下几个优势:1.可编程性强:PLC可以根据桥梁的尺寸、形状、承载能力等参数进行编程,以实现液压顶升装置的同步升降。
2.高效性:PLC具有快速响应的能力,可以高效地控制液压顶升装置的升降速度,从而实现桥梁的整体升降。
3.可靠性强:PLC具有自诊断功能,可以监测各个液压顶升装置的运行状态,保证整个桥梁整体同步顶升过程的安全可靠。
4.易于维护:PLC具有可编程性,可以通过更改程序来实现液压顶升装置的控制,维护起来十分方便。
液压顶升装置的选择液压顶升装置是桥梁整体同步顶升技术的关键组成部分,因此在选择液压顶升装置时需要考虑以下因素:1.承重能力:液压顶升装置需要承受桥梁整体的重量,因此需要选择具有足够承重能力的液压顶升装置。
2.安全性:液压顶升装置需要能够保持稳定状态,避免在升降过程中出现意外情况。
因此需要选择具有高安全性的液压顶升装置。
3.响应速度:液压顶升装置需要能够快速响应PLC的指令,以实现同步升降。

变频控制同步顶升液压系统原理变频控制同步顶升液压系统原理,说起来简单,但其实它背后的奥妙可真不少哦!首先你得知道,液压系统本身就是个能量转换大师。
我们在日常生活中看到的电动工具、起重机,甚至某些汽车,都少不了液压系统的身影。
而这种“同步顶升液压系统”呢,简单来说,就是能让多台液压机同时动作,彼此协调得像一个“团队”,确保它们在同一时刻、同一高度准确地顶起重物。
这不就像你去健身房做深蹲时,教练要求你和同伴一起做,每个人都得保持一致。
如果一个人“偷懒”或者出错,其他人再怎么努力,也难以保持同步。
这个原理其实和液压系统差不多,咱们要确保每台液压装置都在恰当的时机发挥作用,不多也不少。
这时候,变频控制的“神奇”之处就来了,它就像一个无形的指挥官,在背后默默调度着整个液压系统的工作。
变频控制器,听起来是不是有点高大上?但其实它就像你手机里的导航,给液压系统指路。
原本这些液压泵可能会因为负荷过大或者转速过快导致浪费电力,甚至发生故障。
变频控制器一来,就能精确控制每台泵的转速和工作状态,保证系统运行得平稳、节能。
你想,假如你去运动时,用的不是一台跑步机,而是跑得飞快、又耗电的那种机器,那你一会儿觉得累、一会儿觉得困,这跑步还能坚持吗?可是有了变频器,液压泵就像得到了一副好“调料”,适时调整自己的“节奏”,不至于太急,也不会太慢,刚刚好。
而且别忘了,变频控制还有个特别棒的地方,那就是它能根据需要灵活调节液压系统的工作速度。
在同步顶升的时候,液压泵的压力和流量是不断变化的,它需要根据现场的实际情况,做出迅速反应。
这种自适应的调节功能,简直是解决了液压系统中的“大问题”——就是无论是重物开始移动,还是达到顶点时,整个系统都能平稳过渡,一点也不慌乱。
这就像是你做饭时加盐,掌握了火候,盐撒的刚刚好,味道自然就调和了。
你说,变频控制器这么好,那它就能解决所有问题了吗?嗯,虽然它确实是非常给力,但我们可不能只盯着这一个小工具。
2021年6月第49卷第11期机床与液压MACHINETOOL&HYDRAULICSJun 2021Vol 49No 11DOI:10.3969/j issn 1001-3881 2021 11 014本文引用格式:魏列江,顾青青,辛钰林,等.顶模体系中多缸同步顶升液压控制系统设计[J].机床与液压,2021,49(11):65-69.WEILiejiang,GUQingqing,XINYulin,etal.Designonhydrauliccontrolsystemformulti⁃cylindersynchronousliftingofjack⁃upformworksystem[J].MachineTool&Hydraulics,2021,49(11):65-69.收稿日期:2020-03-05基金项目:国家自然科学基金地区科学基金项目(51765033)作者简介:魏列江(1972 ),男,博士,教授,主要研究方向为测控技术与应用㊁电液控制㊂E-mail:weiliejiang@126 com㊂通信作者:顾青青(1995 ),女,硕士研究生,研究方向为液压系统设计及电液控制㊂E-mail:1536946214@qq com㊂顶模体系中多缸同步顶升液压控制系统设计魏列江1,顾青青1,辛钰林2,卢利锋1(1 兰州理工大学能源与动力工程学院,甘肃兰州730050;2 甘肃省第七建设集团股份有限公司,甘肃兰州730030)摘要:针对超高层建筑施工中液压顶升钢平台的负载不均衡导致的多缸同步运动精度低的问题,设计一种以工业控制计算机为上位机㊁西门子PLC为下位机的液压同步控制系统㊂运用高精度的位移传感器和倾角传感器对系统的关键参数进行检测和反馈㊂基于经典的PID控制算法,对对称比例阀的阀口开度进行精确控制,进而控制进入各缸的流量,达到多个液压缸同步顶升的要求㊂建立单个阀控非对称液压缸的数学模型,并进行稳定性分析及系统特性分析㊂结果表明:使用PID控制算法,顶模液压系统响应速度较快,运行稳定且无超调,能满足液压缸同步要求㊂关键词:顶模体系;比例阀;多缸同步控制;PID控制中图分类号:TH137DesignonHydraulicControlSystemforMulti⁃cylinderSynchronousLiftingofJack⁃upFormworkSystemWEILiejiang1,GUQingqing1,XINYulin2,LULifeng1(1 SchoolofEnergyandPowerEngineering,LanzhouUniversityofTechnology,LanzhouGansu730050,China;2 TheNo 7ConstructionGroupShareLimitedCompanyofGansuProvince,LanzhouGansu730030,China)Abstract:Aimingattheproblemoflow⁃precisionofmulti⁃cylindersynchronousmovementcausedbyunbalancedloadofhydrau⁃licjackingsteelplatforminsuperhigh⁃risebuildingconstruction,ahydraulicsynchronouscontrolsystemwasdesignedwithindustrialcontrolcomputerastheuppercomputerandSiemensPLCasthelowercomputer.Thekeyparametersofthesystemweretestedandfedbackbyusinghigh⁃precisiondisplacementsensorandinclinationsensor.BasedontheclassicalPIDcontrolalgorithm,thevalveportopeningofthesymmetricalproportionalvalvewaspreciselycontrolledtoregulatetheflowintoeachcylinder,andthentomeetthere⁃quirementsofsynchronousjackingofmulti⁃hydrauliccylinders.Themathematicalmodelofasinglevalvecontrolledasymmetrichydrau⁃liccylinderwasestablished,andthestabilityandsystemcharacteristicswereanalyzed.TheresultsshowthatbyusingthePIDcontrolalgorithm,thejack⁃upformworksystemhasfastresponsespeed,stableoperationwithoutovershootandcanmeetthesynchronizationrequirementsofhydrauliccylinders.Keywords:Jack⁃upformworksystem;Proportionalvalve;Multi⁃cylindersynchronouscontrol;PIDcontrol0㊀前言随着现代建筑业的快速发展,超高层建筑层出不穷㊂由于超高层建筑高度高㊁跨度大㊁施工较困难,传统的脚手架施工方式对于超高层建筑存在较为严重的安全隐患㊂超高层建筑的发展不仅使整个建筑行业得到快速发展,同时也带动了更先进的施工技术的发展,目前国内外高层建筑施工普遍采取一种全封闭钢平台结构体系[1-6]㊂钢平台需要具有自主爬升的能力,依据国内外现有经验,爬升所需的动力源采用液压系统是当前最有效的方法㊂液压系统现已广泛应用于工业㊁建筑业等行业,由于其功率密度大㊁承载能力强,在重工领域有着无可替代的优势㊂液压传动通过动力元件产生高压油,经过控制元件和管道将高压油输送到液压缸等执行机构,再通过油缸将压力能转化为机械能,驱动设备完成预定工作㊂这不仅可以获得平稳的传动效果,而且容易实现液压系统的无级调速[7-13]㊂本文作者采用液压动力传动方式来完成钢平台的整体顶升㊂顶模液压系统采用4个液压缸作为顶升缸来支撑和顶升整个钢平台,由于液压顶升钢平台负载和自身质量较大㊁负载不平衡㊁施工环境恶劣多变等因素,导致平台水平度的调节难度较大㊂针对在偏载下四缸不同步问题,以钢平台为研究对象,设计四缸同步液压系统和控制系统,以PLC为控制器,结合PID算法,实现四缸同步顶升㊂建立阀控缸的数学模型并进行仿真分析,得到不同参数作用下的阶跃响应,验证系统的可行性和稳定性㊂1 液压顶升系统设计液压顶升系统分为液压驱动系统和液压阀控缸系统两部分㊂驱动系统采用恒压变量泵来为整个系统提供动力源;阀控缸系统由液压阀组㊁液压缸及控制系统组成㊂1 1㊀液压系统中控制元件的选型对于顶升系统来说,控制元件的选择直接决定了顶升系统的同步精度和响应性能㊂适用于同步顶升系统的控制元件大致可以分为以下3种:开关阀㊁比例阀和伺服阀,其性能参数如表1所示㊂表1㊀同步顶升系统控制元件特性元件类型驱动装置结构死区响应频率/Hz经济性抗污染能力开关阀通断电磁铁简单40较低较强比例阀比例电磁铁简单有中位死区80一般强伺服阀力马达或力矩马达复杂无中位死区200较昂贵弱㊀㊀由表1可知比例阀是介于开关阀与伺服阀之间的一种液压阀,它可以根据输入的电信号连续㊁成比例地控制油液的压力㊁流量等参数㊂由于比例阀用于工地这种恶劣工况场所,这就要求其具有较强的抗污染能力;在顶模平台中,为保证油缸动作的调节效果,将阀安装在液压缸附近,但是一旦平台开始使用,无法轻易接近阀,这就要求阀有更好的控制性能和高自动化程度㊂因此,此系统采用比例阀作为控制元件来控制液压缸的同步升降㊂如图1所示,顶模系统采用压力补偿器+比例阀的结构,并加入平衡阀和防爆阀来平衡超越负载和保证平台安全性㊂此系统选用力士乐4WREE系列10通径的比例阀,阀内置放大器㊂由于单缸负载5MN,目前市场上没有符合要求的标准缸,所以需要定制㊂位移传感器选择拉线式传感器BK⁃W2⁃8,量程为0 6m㊂图1㊀单缸系统原理1 2㊀PLC同步控制系统设计钢平台系统主要由液压泵站㊁液压缸组㊁PLC控制系统㊁监测系统㊁工控机和操作台组成,如图2所示㊂图2㊀PLC同步控制系统组成框图PLC是整个控制系统的核心,系统工作时通过操作开关㊁按钮等发出控制信号并分析监测系统发出的检测信号,通过PLC控制泵站和控制阀组驱动执行油缸,以实现控制操作[14]㊂监测系统采用IPC集中控制和监测,选用位移㊁应力㊁压力㊁倾角和温度等多种传感器和仪器,实现被测量数字显示㊁模拟显示㊁波形记录和远距离传输㊂此系统采用西门子S7⁃300PLC,它具有很高的电磁兼容性和抗振动㊁抗冲击能力,可用于恶劣的工程环境[15]㊂液压控制属于流体控制,具有外在干扰大和非线性等特点㊂为了实现多缸的同步控制,需要采用合适的控制方式㊂开环控制的液压系统在没有信号反馈的情况下驱动执行元件时,系统的精度由液压控制元件的控制精度来保证,故阀的精度直接影响系统的精度㊂在液压同步系统中,开环控制通常用于对同步控制不作严格要求的场合㊂闭环控制液压系统具有信号检测元件,可以提供信号反馈㊂与开环控制系统相比㊃66㊃机床与液压第49卷较,闭环控制具有较高的精度㊂为保证钢平台稳定性和安全性,此系统采用闭环控制方式[16]㊂在液压闭环同步控制中,常用的控制方式有 同等方式 和 主从方式 ㊂ 同等方式 是指所有执行元件不分主次,同时跟随期望输出值分别受到控制,从而实现同步驱动的目的[17]; 主从方式 是指所有执行元件中,以其中的一个元件输出为期望输出值,其余的执行元件均受到控制以跟踪这一选定的理想输出,从而实现同步驱动的目的㊂由于此系统中液压缸顶升速度为5m/h,速度较慢,而比例阀的响应性能较好,故选择 同等方式 来实现四缸同步㊂2㊀控制策略液压同步系统具有时变性㊁非线性和大迟滞等特点,其控制算法应遵循简单有效㊁实时性强的原则[18]㊂同步系统中常用的控制算法有加减控制㊁PID控制㊁模糊PID控制㊁神经网络控制等㊂加减控制算法简单㊁实时性强,主要适用于同步精度不高且速度低的场合;PID是目前工程领域使用最广泛的控制算法,适用于高精度控制系统,其原理简单㊁使用方便㊁适应性强㊁鲁棒性强,对被控对象的变化不太敏感,非常适用于环境恶劣的工业生产现场[18];模糊PID与神经网络控制相对前2种控制算法具有更高的控制精度和控制品质,但算法及过程过于复杂,不适用于建筑施工领域㊂本文作者所设计的系统采用PID控制策略以满足四缸同步顶升的工作要求,并保证整个工作过程的稳定可靠㊂同步控制原理如图3所示㊂图3㊀同步控制原理框图3㊀数学模型建立与Simulink仿真3 1㊀液压系统建模在顶模液压系统建模中,液压缸的负载对象为20MN的平台,弹性负载很小可以忽略不计㊂液压缸被视为一个积分环节与二阶环节的组合,其传递函数为G1(s)=1/Ahs1ω2hs2+2ζhωhs+1æèçöø÷(1)其中:Ah为液压缸无杆腔面积,Ah=0 3316m2;ωh为系统固有频率,ωh=Khmt=4EA2mtVt,Hz;ζh为系统阻尼比,ζh=KceAβeMVt㊂比例阀一般被视为二阶振荡环节,其传递函数为G2(s)=kq1ω2vs2+2ζvωvs+1(2)其中:kq为比例阀流量增益;ωv为比例阀的固有频率,Hz;ζv为比例阀的阻尼比㊂系统的传递函数为G(s)=kcs1ω2hs2+2ζhωhs+1æèçöø÷1ω2vs2+2ζvωvs+1æèçöø÷(3)kc=kqkfkpAh(4)其中:kf为位移传感器的增益;kp为PID的比例系数;kc为系统的开环放大增益㊂根据元件选型可知各参数值如表2所示㊂表2㊀元件参数参数参数值参数参数值kq0.15ˑ10-3ζh0.2kf1.25ωv/Hz377kp100ζv0.7ωh/Hz188.4㊀㊀综上所述,得到系统的开环传递函数:G(s)=0 05655s1188 42s2+0 4188 4s+1æèçöø÷13772s2+1 4377s+1æèçöø÷(5)根据闭环控制系统原理框图和各环节传递函数,在Simulink窗口中选取对应模块建立单个阀控缸仿真模型,如图4所示㊂图4㊀单个阀控缸Simulink仿真模型㊃76㊃第11期魏列江等:顶模体系中多缸同步顶升液压控制系统设计㊀㊀㊀3 2㊀稳定性分析与仿真结果任何系统在扰动作用下都会偏离原平衡状态,产生初始偏差㊂稳定性是指系统在扰动消失后,由偏差状态恢复到原平衡状态的性能㊂对于位置控制系统,稳定性至关重要㊂因此,利用MATLAB/Simulink进行线性分析,得到系统Bode图,如图5所示㊂可以看出:当幅频特性曲线穿越0dB线时,对应的相频曲线位于-180ʎ线上方,系统相位裕度为178ʎ;当相频特性曲线穿越-180ʎ线时,对应的幅频特性位于0dB线以下,系统幅值裕度为51dB,较大的相位裕度对应较小的超调量,满足系统无超调要求,因此该控制系统是稳定的㊂图5㊀系统Bode图影响液压控制系统稳定性和快速性的主要参数是开环增益kc㊁液压缸固有频率ωh和阻尼比ζh㊂kc的值越大系统精度越高,液压缸有效面积Ah和比例阀流量增益是所选元件决定的,因此不能调整,位移传感器增益Kf调整范围有限,因此只有改变PID比例系数Kp的值来判断参数变化对系统特性的影响㊂由图6㊀液压系统阶跃响应曲线于同步控制系统不允许有超调量,则响应时间会较长㊂调节PID比例系数Kp,直至系统无振荡,达到临界稳定状态[19]㊂当Kp分别取100㊁150㊁200时,系统的阶跃响应如图6所示,可知:随着Kp的增大,系统的动态响应有明显的改善,响应时间也有所缩短㊂4㊀结束语本文作者采用PLC控制技术完成对液压顶升钢平台的同步控制㊂对单个阀控缸系统建立数学模型并进行仿真分析,获得了在不同参数下的阶跃响应,可知:使用PID控制算法时,系统响应速度较快,运行稳定且无超调㊂在闭环控制的基础上,采用同步方式及PID算法可以满足顶模系统在大跨距㊁重载㊁偏载下四缸的同步要求㊂参考文献:[1]余祖耀,陈壮.基于S7-300的比例阀控液压缸的PID静态补偿控制[J].机械与电子,2016,34(4):43-46.YUZY,CHENZ.PIDstaticcompensationcontrolstrategyofhydrauliccylindercontrolledbyproportionalvalvebasedonS7-300[J].Machinery&Electronics,2016,34(4):43-46.[2]BEJARBANEHEY,BAGHERIA,BEJARBANEHBY,etal.AnewadjustingtechniqueforPIDtypefuzzylogiccon⁃trollerusingPSOSCALFoptimizationalgorithm[J].AppliedSoftComputing,2019,85:105822.[3]RAZAA,ANWARMN.DirectsynthesisbasedPIDcon⁃trollerdesignfortime⁃delayedunstableprocessesinparallelcontrolstructure[J].JournalofControl,AutomationandElectricalSystems,2019,30(6):879-891.[4]任俊杰,李永霞,李媛,等.基于PLC的闭环控制系统PID控制器的实现[J].制造业自动化,2009,31(4):20-23.RENJJ,LIYX,LIY,etal.TherealizationofPIDcontrol⁃lerinclosed⁃loopcontrolsystembasedonPLC[J].Manu⁃facturingAutomation,2009,31(4):20-23.[5]何谦,刘忠.高速开关阀的液压同步系统设计[J].制造技术与机床,2009(1):142-143.HEQ,LIUZ.Designofthehydraulicsynchronizationcon⁃trolsystembasedonhigh⁃speedon⁃offvalve[J].Manufac⁃turingTechnology&MachineTool,2009(1):142-143.[6]张志伟,张福波,王国栋.一种双液压缸同步控制方法及其仿真研究[J].机床与液压,2003,31(3):232-239.ZHANGZW,ZHANGFB,WANGGD.Ansynchroniza⁃tioncontrolstrategyappliedintwocylinderssystemanditssimulation[J].MachineTool&Hydraulics,2003,31(3):232-239.[7]崔海朋.基于S7-300的排管机械手双缸同步控制系统设计[J].机电工程技术,2019,48(6):133-134.CUIHP.Designofthetwocylindershydraulicsynchroniza⁃tioncontrolsystemofpipe⁃pandlingmanipulatorbasedonS7-300[J].Mechanical&ElectricalEngineeringTechnol⁃ogy,2019,48(6):133-134.[8]HALIMAH,ISMAILI.TreephysiologyoptimizationonSI⁃SOandMIMOPIDcontroltuning[J].NeuralComputingandApplications,2019,31(11):7571-7581.[9]周玉伟,章青,石云飞.连续顶升液压控制系统仿真分析与验证[J].中国机械工程,2018,29(16):1936-1942.ZHOUYW,ZHANGQ,SHIYF.Simulationandverifica⁃tionofhydrauliccontrolsystemsforcontinuouslifting[J].ChinaMechanicalEngineering,2018,29(16):1936-1942.[10]何小映.基于MCGS的PID控制参数自整定研究[J].电子设计工程,2019,27(20):55-58.㊃86㊃机床与液压第49卷HEXY.StudyonPIDcontrolwithparametersself⁃tuningbasedonMCGS[J].ElectronicDesignEngineering,2019,27(20):55-58.[11]杨军虎,姜丙孝,苗森春,等.泵作透平发电系统设计及PID参数整定[J].兰州理工大学学报,2019,45(5):50-54.YANGJH,JIANGBX,MIAOSC,etal.DesignofpowergeneratorsystemwithreversiblesetofpumpasturbineandPIDparametersetting[J].JournalofLanzhouUniver⁃sityofTechnology,2019,45(5):50-54.[12]GHOSHS,PANS.SensitivitymodelbasedPIDcontrollerforvarioushigh⁃orderprocesses[J].COMPEL-theInter⁃nationalJournalforComputationandMathematicsinElec⁃tricalandElectronicEngineering,2019,38(6):1855-1873.[13]郑志国.顶升钢平台模架体液压控制系统的设计[J].机电工程技术,2016,45(9):45-47.ZHENGZG.Liftingbodydesignofhydrauliccontrolsys⁃temofsteelplatformformwork[J].Mechanical&Electri⁃calEngineeringTechnology,2016,45(9):45-47.[14]杨慧,凌玉华.基于PLC的3150kN模锻液压机同步控制系统的设计[J].可编程控制器与工厂自动化,2010(2):81-85.YANGH,LINGYH.Thedesignofsynchronouscontrolsystemin3150kNforginghydraulicpressbasedonPLC[J].ProgrammableController&FactoryAutomation,2010(2):81-85.[15]苌晓兵,汤家荣,花晓阳.超高层低位顶升钢平台模架体系液压控制系统设计[J].机床与液压,2017,45(22):126-129.CHANGXB,TANGJR,HUAXY.Hydrauliccontrolsystemdesignforsuperhigh⁃risebuildinglowliftingsteelplatformformworksystem[J].MachineTool&Hydrau⁃lics,2017,45(22):126-129.[16]杨彦琳.电液比例阀控四缸同步的控制算法研究[D].兰州:兰州理工大学,2019.YANGYL.Researchoncontrolalgorithmofelectro⁃hy⁃draulicproportionalvalvecontrolfour⁃cylindersynchroni⁃zation[D].Lanzhou:LanzhouUniversityofTechnology,2019.[17]朱栋.200t大型装备多点液压同步顶升 横移系统设计及工程应用[D].西安:西安建筑科技大学,2016.ZHUD.Designandengineeringapplicationsonmultipointsynchronouslifting⁃shiftinghydraulicsystemfor200tlargeequipment[D].Xi an:Xi anUniversityofArchitectureandTechnology,2016.[18]张贵,黄静华,夏永胜.基于PLC的电液比例伺服系统模糊PID控制研究[J].机床与液压,2014,42(1):83-85.ZHANGG,HUANGJH,XIAYS.ResearchonfuzzyPIDcontrolforelectrohydraulicproportionalservosystembasedonPLC[J].MachineTool&Hydraulics,2014,42(1):83-85.[19]严刚峰.PID控制器参数整定复杂性的分析[J].成都大学学报(自然科学版),2019,38(1):64-68.YANGF.AnalysisofPIDcontrollerparametertuningcomplexity[J].JournalofChengduUniversity(NaturalScienceEdition),2019,38(1):64-68.(责任编辑:张楠)(上接第39页)[11]吴翩卉,卢杜晓,罗忠辉,等.智能机器人的超声波避障技术研发及应用[J].机床与液压,2019,47(9):46-50.WUPH,LUDX,LUOZH,etal.Developmentandap⁃plicationofultrasonicrangingandobstacleavoidingintel⁃ligentrobot[J].MachineTool&Hydraulics,2019,47(9):46-50.[12]张萍,陈国壮,候云雷,等.基于Android平台的WIFI遥控智能小车的设计[J].计算机测量与控制,2018,26(6):189-191.ZHANGP,CHENGZ,HOUYL,etal.DesignofWIFIremotecontrolintelligentcarbasedonAndroidplatform[J].ComputerMeasurement&Control,2018,26(6):189-191.[13]乔怡豪.自动跟随小车控制系统的研究[D].鞍山:辽宁科技大学,2019.QIAOYH.Researchoncontrolsystemofauto⁃followingrobot⁃car[D].Anshan:UniversityofScienceandTechnol⁃ogyLiaoning,2019.[14]邓良益,易佳,王浩,等.一种基于PID算法的智能小车设计[J].科技创新与应用,2019(30):93-94.DENGLY,YIJ,WANGH,etal.AnintelligentcardesignbasedonPIDalgorithm[J].TechnologyInnovationandApplication,2019(30):93-94.[15]肖奇军,郑健聪,陈斯鹏,等.一种基于地图构建与角度传感器的扫地机器人自动回充方法[J].机械与电子,2019,37(2):78-80.XIAOQJ,ZHENGJC,CHENSP,etal.Anautomaticre⁃chargemethodofsweepingrobotbasedonmapconstruc⁃tionandanglesensor[J].Machinery&Electronics,2019,37(2):78-80.[16]范逸伦.自动跟随机器人研究及其测试系统开发[D].哈尔滨:哈尔滨工程大学,2018.FANYL.Researchonautomatictrackingrobotanddesignofitsevaluationsystem[D].Harbin:HarbinEngineeringUniversity,2018.(责任编辑:张艳君)㊃96㊃第11期魏列江等:顶模体系中多缸同步顶升液压控制系统设计㊀㊀㊀。
同步千斤顶液压系统设计探讨同步千斤顶液压系统是一种用于提升重物的机械系统,由多个同步运动的千斤顶组成,通过液压传动实现协同工作。
在工业生产和机械加工领域,同步千斤顶液压系统广泛应用,能够提高工作效率,降低人工劳动强度,提高机械加工精度,保证生产安全性。
本文将从液压系统设计的角度探讨同步千斤顶液压系统的相关技术和实现过程,为机械加工生产提供参考。
一、同步千斤顶液压系统概述同步千斤顶液压系统是由多个千斤顶组成的机械系统,液压油通过液压泵、管路和控制器,分别控制各个千斤顶的工作状态和运动方向,使其协同工作,完成各项生产任务。
同步千斤顶液压系统主要具有以下特点:1. 适用范围广泛:同步千斤顶液压系统主要用于重载物品的定位和占位,如船舶、飞机、大型机械设备等。
2. 构造简单:同步千斤顶液压系统结构简单,由千斤顶、液压泵、控制器组成,搭建方便,易于维护。
3. 工作效率高:同步千斤顶液压系统工作效率高,能够完成同步运动,提高生产效率。
4. 精度高:同步千斤顶液压系统能够精确控制千斤顶的运动,提高机械加工精度。
5. 安全可靠:同步千斤顶液压系统采用液压传动,操作简单、不易出错,同时还具备安全保障功能。
二、同步千斤顶液压系统液压设计同步千斤顶液压系统通过液压传动实现运动控制和力的调整,因此设计液压系统是同步千斤顶液压系统的关键。
液压系统设计应包含以下内容:1. 液压泵:液压泵是同步千斤顶液压系统的核心组成部分,它向系统内提供了压力液。
液压泵的选择需要根据工作的需要来决定,包括流量和压力的要求。
2. 液压管路:液压系统的管路应该能够输出缓慢和高速流速,比如高流速可以实现快速升降,而缓慢流则可以进行调整和控制。
液压管路的压力降和管路长度应该适中。
3. 液压缸体:液压缸体是液压系统中传递力的重要部位,应该考虑内压、外形尺寸、轴向稳定性等因素。
通过计算压力和气缸容积可以选择合适的液压缸体。
4. 控制器:液压系统的控制器的主要作用是控制液压泵的流量和压力,同时控制液压缸的移动速度和方向,以及协同控制整个系统的运动状态。
武汉沃纳液压机具有限公司
公司网址
PLC控制液压同步顶升系统
PLC控制液压同步顶升系统
1、 PLC顶升系统及其工作原理
PLC控制液压同步系统由液压系统(含检测传感器)、计算机自动控制系统两个部分组成,该系统能全自动完成同步位移,实现力和位移控制、操作闭锁、过程显示、故障报警等多种功能。
该系统具有以下特点:①具有Windows用户界面的计算机控制系统;②整体安全可靠,功能齐全;③操作控制集中,所有油缸既可同时控制,也可单独控制;④同步控制点数量可根据需要设置,适用于大体积结构物的同步位移;
⑤各控制点同步偏差极小,结构物的位移精确。
系统主要技术指标:液压系统工作压力10-70Mpa,尖峰压力70Mpa,工作介质为ISOVG46号抗磨液压油,NAS9级清洁度。
系统操纵与检测:常用操纵为按钮方式,人机界面为触摸屏;位移检测采用光栅尺,光栅尺分辨率0.005mm;压力检测为压力传感器,精度0.5%,压力位移参数自动记录。
液压的同步技术探究液压同步技术是一种通过控制多个液压执行元件同时运动的技术,广泛应用于各种工业领域中。
在许多机械设备中,如液压升降平台、液压船闸、液压压力机等,同步技术的应用可以保证各个执行元件同时、精准地工作,从而提高工作效率和产品质量。
本文将探讨液压同步技术的原理、应用和发展趋势。
一、液压同步技术的原理液压同步技术的实现依赖于液压系统的控制装置,通常为液压比例阀或液压伺服阀。
在传统的液压系统中,多个执行元件是由同一个油泵提供液压能源,并通过液压管路连接到控制装置。
控制装置通过调节液压阀的开启程度和工作压力来实现对执行元件的控制。
在液压同步技术中,控制装置特别设计,能够根据需要分别控制各个执行元件的运动速度和位移,从而实现同步运动。
液压同步技术的原理可以简单描述为:通过控制各个执行元件的进油口和回油口,使其得到相同的进油或回油流量,从而实现同步运动。
为了实现对各个执行元件的精准控制,控制装置需要具备高精度的控制算法和灵活的控制策略。
在液压升降平台中,控制装置可以根据平台上的载荷变化自动调整各个执行元件的运动速度和位移,以保证平台的水平和稳定。
液压同步技术在各种工业领域中得到了广泛的应用,其中包括机床加工、航空航天、汽车制造、船舶工程、建筑工程等。
下面以几个典型的应用为例进行介绍:1. 机床加工:在数控机床中,液压同步技术可以实现多轴同步运动,保证加工精度和表面质量。
数控车床上的液压同步技术可以保证各个刀具的进给速度和切削深度的同步,从而提高加工效率和加工质量。
2. 航空航天:在飞机和航天器的起落架、液压操纵系统等部件中,液压同步技术可以保证多个执行元件的同步运动,从而保证飞机的安全和可靠性。
3. 汽车制造:在汽车生产线中,液压同步技术可以实现车身焊接、装配线的同步运动,保证生产线的高效运转和汽车的品质。
4. 船舶工程:在液压船闸、船舶卸货设备等部件中,液压同步技术可以保证船体和货物的同步升降,保证船舶工程的安全和高效。
液压同步顶升控制系统研究
发表时间:2019-12-06T10:53:30.343Z 来源:《电力设备》2019年第16期作者:赵印
[导读] 摘要:同步顶升液压系统是同步顶升技术装备的核心执行机构,采用该技术可以对桥梁等建筑物实施不损伤其原有的结构顶升或者是进行水平的移动,这种方法对比于传统爆破拆除方式来说,具有经济环保、无污染、效率高、交通中断时间短等诸多优点。
(中国核工业二三建设有限公司山东荣成 264300)
摘要:同步顶升液压系统是同步顶升技术装备的核心执行机构,采用该技术可以对桥梁等建筑物实施不损伤其原有的结构顶升或者是进行水平的移动,这种方法对比于传统爆破拆除方式来说,具有经济环保、无污染、效率高、交通中断时间短等诸多优点。
基于此,本文主要对液压同步顶升控制系统进行分析探讨。
关键词:液压同步;顶升控制系统
前言
集成了液压技术、机械结构、计算机算法和电气自动化控制等多家先进理论技术的液压同步顶升系统这一新型施工技术装备可高效精确经济用于改造各类大小桥梁、建筑的平移抬升等施工,液压系统具有系统足够安全,功率密度高能够提供足够的负载,采用集中控制,分散布置,各顶升点既能同步工作,又能协同工作,可把大范围的无极变速的大推力与力矩直线运动进行实时动态监控和智能化先进管理,随着电液控制技术与机电一体化的结合与发展,各种元件的体积愈发的小控制精度愈发的高,更是大大的直接推动了液压系统有关技术的进步与发展。
1、液压同步顶升控制系统
1.1系统简介
液压同步顶升控制系统的原理如图1所示。
该升降台有3个液压升降缸,通过3个比例伺服阀控制升降缸的上升与下降,并推动负载上升或下降。
在工作过程中,升降支座承载能力为800kN。
同时,负载在上升、下降过程中要求升降台严格同步运行,防止负载在运行过程中倾斜、滑落而造成重大的事故。
图1升降支座液压顶升系统原理
1.2系统模型
该系统为典型电液位置伺服系统,控制器根据指令输出控制信号,通过D/A电路转换为模拟电压信号Ui,该电压信号通过比例伺服阀转化为滑阀的阀芯位移信号xv,进而转化为出口流量QL,从而控制双作用液压缸的行程位移xp,再通过位移传感器将xp转换为反馈信号Uf反馈回控制器,构成完整的闭环系统。
对系统进行简化,该闭环系统的开环传递函数为:
K0为放大器的增益;Kv为比例系数;Kq为伺服阀流量增益;Ap为液压缸活塞有效面积;ωn为固有频率;ξn为阻尼比;βe为系统弹性模量;Vt为液压缸两腔总容积;Mt为负载质量;Bp为负载的黏性阻尼系数;Kc为伺服阀流量压力系数;Ct为液压缸总泄漏系数。
2、液压同步顶升工艺方案设计
(1)作业点均匀分散布置
桥梁等建筑物体积重量确实都很大,要实现对其成功进行有效的顶升作业,作业用的液压缸执行件间必须采取分散布置才能均匀分力,在实际的顶升作业过程中液压缸最好均匀分散布置在目标物下方提前计算了的重要顶升作业点位,顶升作业时这几十个液压缸将近乎均匀的分担目标物的所有相关负载;同样的应用于平移作业时,液压执行作业缸也要提前均匀布置到计算好的作业点上。
(2)集中处理操作
考虑到诸如安全、工人数目等因素,操作工人不能去把现场的大范围里面分散布置每个液压缸等执行机构进行一对一手动直接控制,而是在安全的中心控制室内通过全程监控处理系统对顶升作业的液压缸的每一步动作进行远程监视控制现场实时的各缸的工作参数并可以远程修正作业等。
(3)多缸同步力控
体积大质量分布轻重不均的桥梁等建筑物,使得分散开来均匀布置大范围里面的液压缸所受载荷大小情况不可能相同,但是每个执行缸的每次动作所加载的载荷必须与其外部力大致匹配而且可以实时控制,预防建筑物在顶升作业过程中因为受力不均匀导致发送应力集中或形成裂纹而报废。
(4)多缸同步位控
当分散布置在比较大范围里的每一个液压执行缸作业时的位移要求是可以严格实现对不均衡载荷的同步顶升或者下降过程实时控制,从而保证建筑物顶升作业过程中的每一环节的位置实时可以控制。
5)实时动态监控
技术员在中心控制室内通过监视控制系统对每一个液压缸的任意时间的压力、位移进行远程监视预判操作,并且能看到压力、位移的
的液压升降缸为跟踪目标,通过相应的控制算法保证系统运行的同步精度。