玻璃外墙自动清洁机器人(验证机)_本科毕业设计论文
- 格式:doc
- 大小:17.01 MB
- 文档页数:47

第1篇一、实验背景随着科技的不断进步,智能家居产品逐渐走进我们的生活。
其中,智能擦窗机器人作为一种新型的清洁工具,因其便捷、高效、安全的特点,受到了广泛关注。
为了验证智能擦窗机器人的清洁效果和实用性,我们开展了本次实验。
二、实验目的1. 评估智能擦窗机器人的清洁效果;2. 分析智能擦窗机器人的使用便捷性;3. 探讨智能擦窗机器人在实际应用中的优势与不足。
三、实验方法1. 实验材料:智能擦窗机器人、实验用窗户、清洁剂、计时器、记录表等;2. 实验步骤:(1)将窗户分为若干区域,标记编号;(2)使用智能擦窗机器人对每个区域进行清洁;(3)记录每个区域的清洁时间、清洁效果及使用过程中遇到的问题;(4)对清洁效果进行评分,包括清洁度、均匀度、边角处理等方面;(5)统计智能擦窗机器人的使用便捷性。
四、实验结果与分析1. 清洁效果评估(1)清洁度:智能擦窗机器人对窗户的清洁效果较好,灰尘、污渍等基本被清除,窗户表面光亮如新;(2)均匀度:机器人清洁过程中,清洁力度较为均匀,无明显色差;(3)边角处理:智能擦窗机器人具备智能识别功能,能够较好地处理窗户边角等复杂区域;(4)清洁效果评分:平均分为4.5分(满分5分)。
2. 使用便捷性分析(1)操作简单:智能擦窗机器人具备一键启动功能,用户只需按下按钮即可开始清洁;(2)清洁效率高:相较于人工清洁,智能擦窗机器人的清洁速度更快,节省了人力和时间;(3)安全可靠:智能擦窗机器人具备多种安全保护措施,如跌落保护、过热保护等,降低了使用风险;(4)使用便捷性评分:平均分为4.8分(满分5分)。
3. 优势与不足(1)优势:①提高清洁效率,节省人力和时间;②降低使用风险,保障安全;③清洁效果较好,满足家庭清洁需求;④操作简单,易于上手。
(2)不足:①价格相对较高,普及程度有限;②清洁区域有限,不适合大面积窗户;③清洁剂使用需注意环保问题。
五、结论通过本次实验,我们验证了智能擦窗机器人在清洁效果和使用便捷性方面的优势。

第一章绪论1.1 服务机器人概述自第一台工业机器人问世以来,机器人有着突飞猛进的发展。
机器人在工业、国防和科学技术中日益广泛的应用,带来了巨大的经济和社会效益,也有力地推动了有关学科和技术领域的发展。
服务机器人是一个新的机器人研究领域。
作为正在发展新研究领域,服务机器人有许多不同的定义,但它的最基本特征是提供服务。
和工业机器人一样,服务机器人基本上包括机器人的所有基本特性。
它往往和人结合于同一工作环境中,这隐含着许多工业机器人没有的特性,如安全问题、人机交互性、在非结构化环境中的高度自治等。
目前服务机器人成功应用的领域有雕刻,消防,清洗,医疗,焊接等等。
从长期来看,服务机器人的英勇数量将会超过工业机器人。
1.1.1服务机器人的机械结构问题机械系统是服务机器人系统中的一个重要组成部分,是完成抓取对象实现所需运动的机械部分。
它与一般地机械系统相比,除要求较高的定位精度之外,还应具有良好的动态相应特性。
服务机器人可以是静止或移动的平台。
静止平台式服务机器人通常具有手臂结构它们能用于加油、飞机清洗和辅助残疾人。
这种手臂结构的服务机器人也许会有各种工业机器人的基本特点,也可能会有移动轮但它们不用于操纵机器人。
通常的服务机器人是可移动的,最典型的移动机器人是轮式结构,当然也可能有其它方式移方式如步行爬行和飞行等,但它们仅仅用于不适合轮式机器人的环境中。
1.1.2服务机器人的适用环境工业机器人所处的环境为制造环境,即所谓的“结构化”环境,其环境信息往往处于非制造环境,即所谓的“非结构化”环境,其环境信息往往是多义的、不完全的或不准确的。
服务机器人通常在非结构化和比较复杂的环境中运行也就是指办公室、公共大楼、超市和家庭等。
人和机器人通常共处在同一环境中并且环境会出现预料之外的改变,如家具位置的随意摆放、人的随意走动等因而服务机器人必须能自我管理和处理环境中的一切。
机器人设计人员必须能安全地假设许多环境模型来弥补现存环境感知技术的缺点。
价值工程0引言随着人民生活水平的不断提高,人们对生活环境提出了更高的要求。
在建筑业,由于玻璃的采光性好、保温防潮性能好,彩色玻璃实用美观,高层建筑越来越多地采用玻璃窗的结构。
但是,由于随着时间的推移,雨雪天气以及空气中的灰尘,就会逐渐的蒙上一层厚厚的城市灰尘,使得这些建筑黯然失色,这样就需要对玻璃窗进行清洗。
目前对高层建筑上玻璃的清洗工作主要是由人工完成的。
高空擦洗,稍有不慎就会出现事故,造成伤亡。
因此人们迫切希望能有一种清洗机器来代替人工作业。
这种清洗机器的使用将大大降低高层建筑的清洗成本,提高劳动生产率。
所要设计的高层户外玻璃自动清洁器,要求既要做到简单实用,又要价格便宜。
这样经济实惠的擦玻璃机器人想法就悠然诞生了。
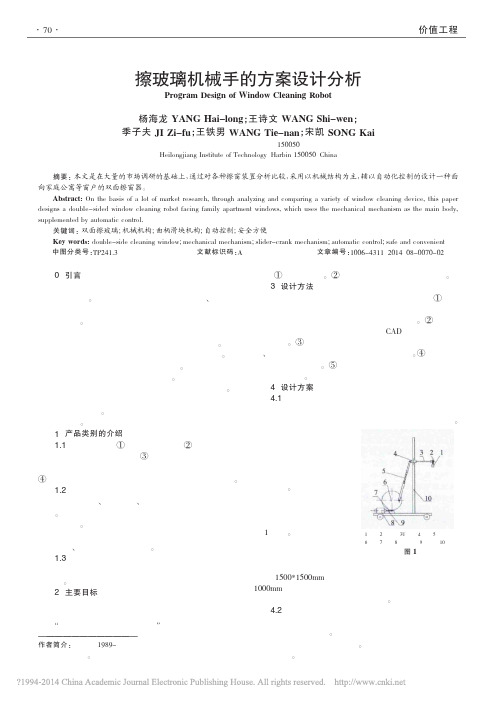
1产品类别的介绍1.1双面玻璃擦①一面擦,两面净;②站在屋里擦窗外玻璃,安全,方便,又省力;③本产品通过磁力相吸的原理,内动外应,从而达到一次操作,玻璃两面干净的效果;④同时解决了人们住楼房不便到窗外擦玻璃,极其安全。
1.2机械臂式玻璃擦一种手撑式电动多功能玻璃清洁器由刷头装置、撑杆装置、电动装置和喷雾装置四部分构成。
功能:解决人们在高楼室内清洁窗及玻璃窗外侧面玻璃的难题。
撑杆上还装有手压泵,通过软管可将清洗液送至刷头喷出,擦头罩壳内壁上有凸棱曲线,具有收集污液的功能、可避免污染周围环境。
1.3撑杆式玻璃擦玻璃擦头固定在一根长的不锈钢管上,一侧是擦玻璃的海绵体,另一侧是清除玻璃上污水的刮擦。
2主要目标根据所调查的资料显示,不管是擦玻璃器还是擦玻璃机器人的开发比较完备,无论在功能上,还是材料上,因此这次“自动擦玻璃器的设计与制作”设计主要希望实现两个目标:①功能完备化。
②降低高空擦玻璃机器人的成本。
3设计方法具体的设计方式我们采用以下几点顺序原则:①资料的查询,在图书馆查阅工具书,电子阅览室查询论文期刊等资料,了解自动擦玻璃机的发展趋势及状况。
②初步构建自己的自动擦玻璃机的图形,绘制CAD 图形,了解各部分的构造。

高空玻璃清洗机器人的设计与研究张栋楠;李华光【摘要】随着国家新型城镇化建设进程的不断推进,各类城市高层建筑不断挺拔而出.随之而来的是一系列的问题,如外窗清洁维护.采用人工方式,由于清洁行业起步较晚,"蜘蛛人"多是外来务工人员,流动性大,没有细致的行业细分且存在安全隐患.为了保障人员安全以及提高服务效率,高空玻璃清洁机器人将广泛投入城市使用.本设计是一个将装置驱动部分放置于屋顶、51单片机控制,通过红外线传感器附加臂,一种多吸盘组交替吸附工作、工作部框架式移动紧贴下放于窗外进行清洗的智能化、自动化的外窗清洗机器人,具有制造相对容易、性价比高、放置于建筑顶层方便安全的优点,能够更好地深入人民大众的生活场所,给人们的日常生活带来极大的便利.【期刊名称】《科技视界》【年(卷),期】2018(000)017【总页数】2页(P16-17)【关键词】高空玻璃清洁机器人;51单片机;红外线传感器;智能化【作者】张栋楠;李华光【作者单位】青岛黄海学院,山东青岛 266427;青岛黄海学院,山东青岛 266427【正文语种】中文【中图分类】TP2420 引言随着城镇化建设的不断加快,高层建筑外窗清洁维护工作等问题日益凸显,这就为高空玻璃清洁机器人提供了较大的发展空间。
由于高空玻璃清洁机器人设计复杂,编程困难,工作量大。
目前,传统的设计方法往往效率低,精度低。
现代高性能高空玻璃清洗机器人的设计要求很难满足,将产生一系列智能产品投入市场。
高空玻璃清洁机器人,比起普通擦窗机与人工作业,它不仅安全系数有了很大的提高,而且工作效率也有了很大的提升。
对此,团队在设计基础上进行了创新和理论性方面研究。
高空玻璃清洗机器人的研制成功,将会实现清洗作业的自动化,给清洗业带来一次新的革命。
1 机体总体方案设计为设计高空玻璃清洗机器人,机器人必须要具有在壁面上吸附和移动功能,以保障他人安全以及设备自身安全;此外还应该具有相应的清洗工作部、控制模块以及高压气体、水等的供应功能。
题目:玻璃清洁机器人吸附机构设计摘要高楼玻璃幕墙清洗机器人是特种机器人的一个分支。
它是基于壁面移动机器人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,提出了分层次规划的体系结构。
在此基础上,对机器人总体结构进行了设计分析,并应用有关计算理论和计算软件进行了主要参数设计和关键部件的结构设计,讨论了机器人的作业路径,运动控制规划及吸附机构的设计,最后,应用Pro/ENG三维软件针对所设计的机器人建立了三维实体模型。
关键词:玻璃幕墙清洗,机器人,运动分析ABSTRACTGlass-wall cleaning robot is one of robot for limited operation,which can walk on Vertical glass-wall with washing devices」t is a robot with specific applied functions,Based on wall-climbing robot techniques.for specific objects.And it works on vertical Glass-wall,where is dangerous for human beings」t is a robot could conquer the gravity effect and carry cleaning equipments,facing to glass-wall surface beautifying service of modern high-risebuildings.Firstly, the whole frame of the glass wall cleaning robot is introduced,and theLevel-based planning is discussedalso. Based on this, the designing and analyzing Of the structure of the robot are described in details,the main parameters designing and structure designing of the key parts are also processed by using some of correlative calculating theories and soft .Then,mission-oriented and local motion planning are discussed.At last,three-dimensionamodel of the robot are established by Means of Pro/ENGINEER,soft.Key words:Glass-wallclea ning robotvacuum adsorpti on system目录摘要 (1)ABSTRACT (1)1前言 (3)2机器人总体方案规划 (4)2.1 机器人设计思想 (4)2.2外形尺寸选择 (5)3吸附机构 (6)3.1吸附方式 (6)3.1.1吸附方式选择 (6)3.1.2吸盘结构简图 (7)3.1.3机器人控制原理图 (7)3.2吸附力分析 (8)3.2.1 材料选择 (8)3.2.2吸附力计算 (9)3.2.3系统抗倾覆计算 (9)3.3其他机构的选择 (10)3.3.1射流器选择 (10)3.3.2水泵和水管的选择 (11)3.3.3密封机构 (11)4总结 (13)参考文献 (14)致谢 (15)1冃U 言在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的风景。
擦玻璃清洗机摘要本文主要介绍了擦玻璃清洗机结构部分和采用相关技术以及预测研究成果前景,还有设计任务分配。
关键词擦玻璃清洗机真空吸附机器手机器脚中间体1 引言近年来,随着国经济的发展,城市高层建筑成倍的增长,由于高层外壁的玻璃随着时间的延长,外壁玻璃上增加了许多的粉尘和其他污物。
至今,有95%城市高楼玻璃外壁采用的是人工清洗完成,它不仅投入大,效率低,费工时时,而且极其危险,因此我们小组决定设计一种能携带清洗装置或其他功能在高楼玻璃外壁移动的机器。
代替人进行高空作业,使人脱离人生安全的危险自动化的机器。
我们采用了吸盘和履带合作的技术。
它具有结构简单,稳定可靠,操作方便,成本低,便于大量生产等特点。
对于以上特点,该机器可应用大量高楼玻璃的清洗工作,也可以再一层楼上用多个机器,这样可以大大的改善工作效率提高,具有一定的使用价值,可减少人工清洗的危险度,也大解放社会生产力,所以有一定的开发前景和经济市场。
擦玻璃清洗机的结构部分擦玻璃清洗机的结构部分分二大类; 一机器本体; 二控制系统;机器本体又分二大类; 一机器支架, 二运动动力系统。
机器支架分为;擦玻璃机器手,中间体,机器脚。
2 擦玻璃机器手对于整个擦玻璃清洗机,经过我们小组对几种擦玻璃机器手的对比加分析后,得出最优的方案,所以我们小组采用天真发明一种擦玻璃机械手,其特征在于它是由转盘擦头、手杆、轴承及双拉线所构成;所说的转盘擦头是一带一个直角的硬板及与之固定的擦拭软布构成,该转盘擦头的硬板面中心位置有一连接座,连接座处装有轴承,所说的手杆与轴承中的轴心相连接,手杆下端装有呈平行板状的拉线支架,二拉线的各一端装在拉线支架上呈可拉动状,另一端分别固定连接于转盘擦头的直角下两端,转盘擦头依轴承、手杆及二拉线呈18 0°可旋转状。
我们选择小组选择这种擦玻璃机器手的理由是:1.构造简单,使用方便、安全,可解决擦玻璃的各种情况;2.成本低。
在机器手的清洗端,我们采用市面上最新的去污方法,就是采用非接触式去污技术,采用这种技术的优点是,既无压力,又不加清洗剂,体现了简洁,环保的设计理念。
墙壁清理机器人:角落清理的移动装置的方案T.Miyake,H.Ishihara 著黄昌显译摘要:本次研究的目的是为了开发一种用于清洗一个大玻璃窗(如清洗一个展览窗)的机器人。
为了使此机器人能用于现实当中,需要以下几个要求:1.能够清洗窗户的角落,因为污垢经常残留在那里。
2.能够连续地清扫玻璃窗,防止条纹图案留在玻璃窗上。
该机械装置的关键是围绕其他部分移动部件的旋转和连续的运动能达到上述的要求。
前者使得机器人在窗户的角落可以改变方向,以保持其位置和角度的适中。
后者对于预防在窗户玻璃上留下条纹图案是必须的。
我们设计通过两个轮子的运动达到连续的运动以及通过利用吸盘吸附在玻璃窗上。
机器人原型的尺寸大约是300毫米×300毫米×100毫米,没有电池的时候重量约为两公斤。
这个原型在垂直光滑的窗户玻璃上的基本实验结果是,垂直方向向上的移动速度为0.08米/秒,垂直向下的移动速度是0.14米/秒,水平方向移动速度为0.11米/秒。
这篇文章的第一章提到了研究的背景和此次研究的目标,以及介绍墙上清理机器人的概念。
第二章讨论了附着和运行的机械装置。
第三章在实验的基础上论述了其基本特性。
最后,在第四章当中讨论了未来的工程与难题。
关键词:移动机械机构,机器人1 前言最近,我们对于建筑物外部表面的自动清洗有许多要求。
一些特制的窗口清洗机已经被安装应用于建筑物保养领域的实际当中。
然而,从一开始它们几乎都是安装在建筑物当中,而且他们需要非常昂贵的费用。
因此,在建筑维修领域当中,要求体积小、重量轻、便携式窗口清洁机器人也正在发展。
清洁公司对窗户清洁机器人需求的现场调查研究结果表明,为了使窗户清洁机器人用于实际当中,需要满足以下几点:1.为了便于携带,它的尺寸应当小,重量应当轻。
2.能够清洁窗户的角落,因为那里往往遗留污垢。
3.能连续地清扫玻璃窗,防止条纹图案留在玻璃窗上。
该移动装置的选择必须满足这些要求,尤其是后两项。
• 182•为了解决玻璃幕墙清洗问题,设计了一种绳牵引式玻璃幕墙清洗机器人。
该设备由机器人本体、驱动系统、PLC 控制系统等组成。
应用Solidworks 三维软件,对该机器人进行了三维建模。
结果表明:该机器人能有效的完成玻璃幕墙的清洗工作。
高层建筑普遍使用建筑玻璃幕墙来替代墙壁材料,现今用于清洗玻璃幕墙的方式主要有两种,一种方式是清洁人员借助升降平台吊篮装置完成清洁工作,这种清洁方式的优点是操作简单、容易实现,但是劳动强度高、效率低,且属于高空作业,存在很大的安全隐患。
另外一种方式是借助安装在楼顶的轨道系统,用专用的自动擦窗机完成对玻璃幕墙的清洗工作,这种方式虽较人工清洗的方式安全性和高效性都有提高,但设备投资成本高,且要求建筑物的设计也要将这种擦窗系统考虑在内,因此限制了其大量使用。
现有壁面机器人多数以自行机器为主,如吕雪设计的清洁机器人为四轮小车型爬壁机器人,能够在水平面与垂直面甚至是任何角度的玻璃幕墙上都能够自由行走。
温聪研究了双节式结构的履带式爬壁机器人适用于彩钢板壁面的清洁工作。
而绳牵引式机器人利用绳索牵引装置进行各种动作,用于玻璃幕墙清洗,可以有效解决机器人爬在壁面的抓墙问题,具有特殊的优势。
本文把绳牵引机器人引入到玻璃幕墙清洗上,设计了一种绳牵引式玻璃幕墙清洗机器人,可以减少清洁工人的负担,提高清洁效率、减少耗资。
该设备采用电动机驱动,利用卷扬机收放绳索牵引机器人本体,机器人支脚采用滚珠在玻璃幕墙上移动,避免在玻璃幕墙上留下划痕,用PLC 控制系统控制盘刷和滚刷进行清洗工作。
1 整机设计本机器人整体由机器人本体、驱动系统、PLC 控制系统组成,清洗机器人结构示意图如图1所示。
机器人主要包括三大功能:移动功能、吸附功能、清洗功能。
移动功能通过楼顶的卷扬机用绳来控制机器人上下、左右移动。
吸附功能通过多个真空吸盘来实现,用气阀开关来控制真空吸盘动作。
清洗功能通过泵来抽取位于楼顶水箱的水喷于玻璃面,用滚刷与刮板清洗。
玻璃清洁机器人结构设计摘要本文首先对玻璃清洁机器人这个课题的来源、目的及意义进行了阐述,简单介绍了国内外玻璃清洁机器人的发展情况,对玻璃清洁机器人的几种不同的移动方式及吸附方式进行了比较,最后采用了多吸盘的框架式结构,具有结构简单、操作方便等优点。
接着对玻璃清洁机器人的总体方案进行了设计,设计了行走机构以及转向机构,通过平动气缸与腿部气缸来实现机器人的移动,并且通过对玻璃吸附可靠性的分析选择了吸盘、吸盘支座及快拧接头等部件,还对其它的气动元件进行了选型,并且绘制了气压系统图。
关键词:玻璃清洁机器人; 多吸盘的框架式结构; 行走机构; 转向机构;ABSTRACTThis paper on the glass cleaning robot source, purpose and significance of the topic, introduces the development situation of glass cleaning robots at home and abroad, several different mobile ways of glass cleaning robot and adsorption methods were compared, and finally adopted more suction cup frame type structure, has the advantages of simple structure, convenient operation. Then for glass cleaning robot design, the overall scheme of the walking mechanism and steering mechanism design, through the translation of cylinder and the leg cylinder to realize the movement of the robot, and through the analysis of the surface adsorption reliability choose chuck, chuck support and quick screw connector components, such as also for other pneumatic components selection, and map the pneumatic system.Keywords: glass cleaning robot; Suction cup frame type structure; Walking agencies; Steering mechanism;目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 爬壁机器人 (1)1.2 课题的目的与意义 (2)1.3 国内外玻璃清洁机器人的研究现状 (2)1.4 课题主要内容及技术参数 (4)1.5 本章小结 (4)2 玻璃清洁机器人的方案确认 (5)2.1 玻璃清洁机器人的组成 (5)2.2 玻璃清洁机器人的方案确认 (6)2.3 本章小结 (6)3 玻璃清洁机器人的总体设计 (7)3.1 行走机构的设计 (7)3.1.1 平动气缸的设计与校核 (7)3.1.2腿部气缸的设计与校核 (12)3.3 转向机构的设计 (14)3.2.1 步进电机的选型 (14)3.2.2 蜗轮蜗杆的设计与校核 (15)3.3 吸附装置的选取 (18)3.3.1 吸附可靠性分析 (18)3.3.2 吸附装置的选取 (20)3.4 玻璃清洁机器人的框架以及吸盘安装板的设计 (22)3.4.1 下框架的设计 (23)3.4.2 上框架的设计 (23)3.4.3 中间旋转板的设计 (24)3.4.4 吸盘安装板的设计 (24)3.5 控制阀及其它气动元件的选取 (25)3.5.1气源处理组件的选取 (25)3.5.2 方向控制阀的选取 (25)3.5.3 单向节流阀的选取 (26)3.5.4 真空安全阀的选取 (27)3.5.5 分气块的选取 (27)3.5.6 气电压力转换器的选取 (27)3.5.7 真空发生器的选取 (28)3.6气动原理图的设计 (28)3.7 本章小结 (29)结论 (30)参考文献 (31)致谢 (32)1 绪论1.1 爬壁机器人捷克的剧作家卡雷尔·凯培尔最先提出了机器人这个词语,体现出了人类想要创造出一种能够模仿人的行动的机器,从而能代替人类去进行不同的工作的一种长久的愿望。
本科毕业论文(设计) 题 目: 玻璃外墙自动清洁机器人(验证机) 学 院: 物理与电子科学学院 专业:电子信息科学与技术 诚 信 承 诺 我谨在此承诺:本人所写的毕业论文《玻璃外墙自动清洁机器人(验证机)》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名): 2013 年 4 月 20 日 玻璃外墙自动清洁机器人(验证机) 摘 要 :本文主要介绍了玻璃外墙自动清洁机器人的设计背景、设计思路、制作过程、工作原理、验证过程以及使用方向。由于限于实验室条件以及对设计思路可行性的不确定性,所以决定先做一个验证机,即验证方案的可行性和对后期产品的设计提供方案。 玻璃外墙机器人在制造过程中主要使用了以下器件和材料,方管铝合金,自攻螺丝钉,铝板,DC5V步进电机,超大吸盘,微型抽气机,8mm丝杆,5mm空气导管,无线模块,5V直流电源模块,74HC595以及单片机。 玻璃外墙机器人主要是由铝合金搭建主框架,这样可以在不降低机器人强度的情况下减轻重量。机器人铝合金结合部以铝片加自攻螺丝钉加固,运动部分使用8mm丝杆加齿轮以控制运动,动力则采用DC5V步进电机的转动带动机器人运转,在工作时,以微型抽气机抽出超大吸盘内的空气以使机器人吸在玻璃墙幕上,整个机器人使用51单片机来控制驱动,使用74HC595对单片机的I/O口进行扩展,机器人用220V交流电转5V直流电源模块供电,以确保步进电机能达到额定电流,提供强劲的动力,再用无线模块控制机器人的状态,使得机器人稳定有序的工作。 可以适合全玻璃结构的建筑体以及建筑中部分的玻璃墙面的清洁工作,它可以在无人干预的情况下完成指定玻璃墙面的清洁,替代传统的人工室外清理,。使用玻璃外墙自动清洁机器人可以最大化的降低人的危险和劳动强度,提高工作效率,降低成本。 它还具有越障功能,对于有起伏有其他装饰材料的玻璃墙幕同样适合,同时它还能转弯,不光能垂直上下,还能向左向右移动真正做到清洁无死角。玻璃外墙自动清洁机器人的清洁头同样使用步进电机控制,可以随工作环境的不同而随意的更改方向和高度。有了这些设计,玻璃外墙自动清洁机器人可以说是真正做到清洁无死角。 关键词:单片机;步进电机吸盘;微型抽气机;玻璃外墙;无线控制;机器人;74HC595
Glass wall automatic cleaning robot (demonstrator)
Abstract:This paper describes the automatic glass wall cleaning robot design background, design ideas, production process, the working principle, the verification process and the use of direction. Limited to laboratory conditions and the uncertainty of the feasibility of the design ideas, So I decided to do a validation machine to verify the feasibility and the latter part of the product design program. Glass wall of robots in the manufacturing process, the main use of the following devices and materials, square tube aluminum alloy, self-tapping screws, aluminum, the DC5V stepper motor, oversized cups, mini air pump, 8mm screw, the 5mm air ducts, the wireless module 5V DC power supply module, 74HC595 microcontroller. The glass exterior robot main structures the main frame is made of aluminum alloy to reduce the weight, so that in case the robot does not reduce the strength of. Robot aluminum alloy junction of aluminum and self-tapping screws reinforcement, moving parts the 8mm screw plus gear to control the movement, power DC5V stepper motor driven rotation of the robot operation at work, a micro air pump out oversized air within the suction cup to the robot suction on the glass curtain wall, the entire robot uses 51 microcontroller to control the drive, using the 74HC595 microcontroller I / O port expansion, robot 220V AC to 5V DC power supply modules to ensure that the stepper The motor can reach the rated current, strong power, and then the state of the wireless module to control the robot, the robot stable and orderly work. Suitable for all-glass structure of the building and the glass wall of the building part of the cleaning work, it can be done in the absence of intervention the specified glass wall clean alternative to traditional artificial outdoor clean-up. Automatic glass wall cleaning robot can be maximized to reduce the risk of human and labor intensity, improve work efficiency, reduce costs. It also has the more impaired function, there are ups and downs and other decorative material is also suitable for glass curtain wall, it can turn, not only vertically up and down, but also to move to the right to the left truly clean and free of dead ends. The glass exterior automatic cleaning robot cleaning head using the same stepper motor control, with different work environment free of change direction and height. With this design, the automatic glass wall cleaning robot can be said to truly clean and free of dead ends. Key words: Single-chip; stepper motor; sucker; Micro air pump; glass wall; radio control; robot; 74HC595 目 录 1 绪论............................................................................................................................................. 6 1.1 课题研究背景及意义 .............................................................................................................. 6 1.2 课题研究现状 .......................................................................................................................... 6 1.3 研究要求 .................................................................................................................................. 7 2 玻璃外墙自动清洁机器人机械部分设计 ................................................................................. 7 2.1 基本问题的解决及材料的选取 .............................................................................................. 7 2.2 玻璃外墙自动清洁机器人机械部分设计 .............................................................................. 8 2.2.1 机器人的框架设计 ............................................................................................................... 8 2.2.2 玻璃外墙自动清洁机器人腿的设计 ................................................................................... 9 2.2.3 玻璃外墙自动清洁机器人行走动力设计 ......................................................................... 10 2.2.4 玻璃外墙自动清洁机器人清洁头设计 ............................................................................. 11 2.2.5 玻璃外墙自动清洁机器人吸附系统设计 ........................................................................... 12 2.2.6 玻璃外墙自动清洁机器人机械部分总体设计 ................................................................. 12 3 玻璃外墙自动清洁机器人硬件电路部分设计 ....................................................................... 14 3.1 单片机最小系统设计 ............................................................................................................ 14 3.2 单片机I/O口的扩展设计 ...................................................................................................... 14 3.3 系统系统PCB设计 ................................................................................................................ 14 4 玻璃外墙自动清洁机器人软件设计 ....................................................................................... 15 4.1 程序设计思路 ........................................................................................................................ 15 4.2 系统总体程序算法流程图 ...................................................................................................... 16 4.3 玻璃外墙自动清洁机器人前进程序算法流程图 ................................................................ 17 4.4 玻璃外墙自动清洁机器人后退、左转弯、右转弯程序算法流程图 .................................. 18 4.5 玻璃外墙自动清洁机器人程序设计语言 .............................................................................. 18 5 调试........................................................................................................................................... 18 5.1 调试整体方案 ........................................................................................................................ 18 5.2 机械部分调试 ........................................................................................................................ 18 5.3 硬件电路的调试 .................................................................................................................... 19 5.4 系统程序的调试 .................................................................................................................... 20 5.5 调试结果 ................................................................................................................................ 20 6 结论........................................................................................................................................... 20 注释 ................................................................................................................................................ 22 参考文献......................................................................................................................................... 22 致 谢 .............................................................................................................................................. 24