第五章 频率域方法
- 格式:ppt
- 大小:1.20 MB
- 文档页数:91
第五章频率域方法稳定裕度设单位负反馈系统开环传递函数为)(s G ()C s ()R s )42()(2++=s s s Ks G 开环不稳定极点个数:P=0,开环增益K 的变化会引起稳定性的变化。
j=0ω+=0ω=+ω∞=8K 1−0j=0ω+=0ω=+ω∞8K >1−不稳定j=0ω+=0ω=+ω∞8K <1−稳定若系统的开环传递函数是最小相位的,且Nyquist 曲线恰好经过(-1,j0)点,则存在一个频率值,使得1ω上式表明系统有一对闭环极点位于虚轴上,此时系统处于临界稳定状态,称(-1,j0)点为临界点。
1s =j i ω±0j=0ω+=0ω=+ω∞8K <1−在不包围(-1,j0)点时,Nyquist 曲线靠近(-1,j0)点的程度,表征系统稳定的程度,越靠近(-1,j0)点,稳定的程度越低。
j=0ω+=0ω=+ω∞=8K 1−1=ωω111+()()0G j H j ωω=11()()1G j H j ωω=−或稳定裕度是衡量闭环系统稳定程度的指标,具体分为相稳定裕度和模稳定裕度。
设系统的开环传递函数是最小相位的,则相稳定裕度定义为()()=1c c G j H j ωω20lg ()()=0 (dB)c c G j H j ωω()()(180)c c G j H j γωω︒=∠−−其中,频率称为截止频率,满足以下条件:c ω或0γ>,系统稳定。
0γ<,系统不稳定。
GHL lg 20=ωGH∠γcω180−01−jγcω0()()G j H j ωωA设系统的开环传递函数是最小相位的,则模稳定裕度定义为|)()(|111ωωj H j G h =11(dB)20lg 20lg ()() h h G j H j ωω==−或其中,频率满足以下条件:1ω11()()180G j H j ωω∠=−︒1h >或系统稳定。
20lg 0 (dB)h >1h <或系统不稳定。
146第5章 线性系统的频域分析与校正时域分析法具有直观、准确的优点。
如果描述系统的微分方程是一阶或二阶的,求解后可利用时域指标直接评估系统的性能。
然而实际系统往往都是高阶的,要建立和求解高阶系统的微分方程比较困难。
而且,按照给定的时域指标设计高阶系统也不是容易实现事。
本章介绍的频域分析法,可以弥补时域分析法的不足。
频域法是基于频率特性或频率响应对系统进行分析和设计的一种图解方法,故又称为频率响应法。
频率法的优点较多。
首先,只要求出系统的开环频率特性,就可以判断闭环系统是否稳定。
其次,由系统的频率特性所确定的频域指标与系统的时域指标之间存在着一定的对应关系,而系统的频率特性又很容易和它的结构、参数联系起来。
因而可以根据频率特性曲线的形状去选择系统的结构和参数,使之满足时域指标的要求。
此外,频率特性不但可由微分方程或传递函数求得,而且还可以用实验方法求得。
这对于某些难以用机理分析方法建立微分方程或传递函数的元件(或系统)来说,具有重要的意义。
因此,频率法得到了广泛的应用,它也是经典控制理论中的重点内容。
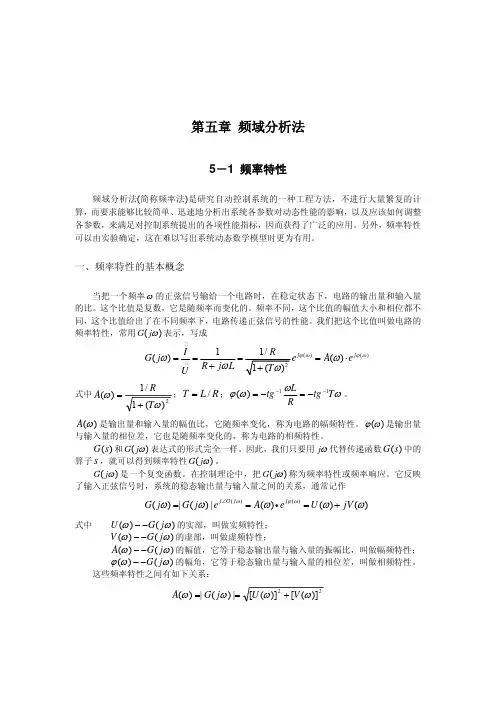
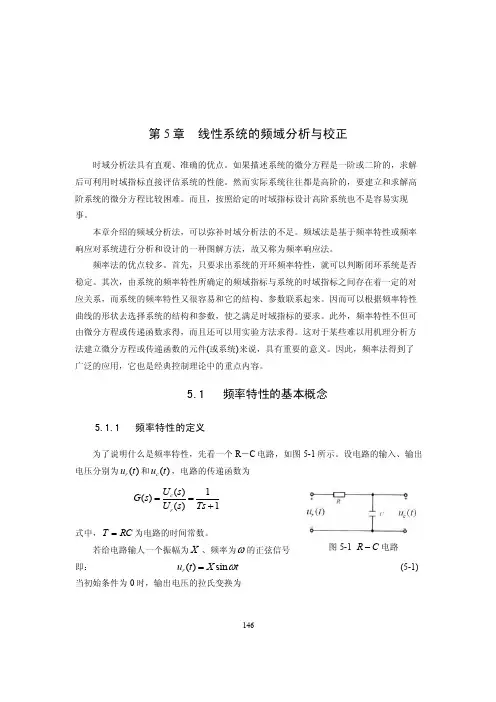
5.1 频率特性的基本概念5.1.1 频率特性的定义为了说明什么是频率特性,先看一个R -C 电路,如图5-1所示。
设电路的输入、输出电压分别为()r u t 和()c u t ,电路的传递函数为 ()1()()1c r U s G s U s Ts ==+ 式中,RC T =为电路的时间常数。
若给电路输人一个振幅为X 、频率为ω的正弦信号 即: ()sin r u t X t ω= (5-1) 当初始条件为0时,输出电压的拉氏变换为图5-1 R C -电路1472211()()11c r X U s U s Ts Ts s ωω==⋅+++ 对上式取拉氏反变换,得出输出时域解为()22()arctan 1t T c XT u t e t T T ωωωω-=+-+ 上式右端第一项是瞬态分量,第二项是稳态分量。
·145·第5章 线性系统的频域分析法重点与难点一、基本概念 1. 频率特性的定义设某稳定的线性定常系统,在正弦信号作用下,系统输出的稳态分量为同频率的正弦函数,其振幅与输入正弦信号的振幅之比)(ωA 称为幅频特性,其相位与输入正弦信号的相位之差)(ωϕ称为相频特性。
系统频率特性与传递函数之间有着以下重要关系:ωωj s s G j G ==|)()(2. 频率特性的几何表示用曲线来表示系统的频率特性,常使用以下几种方法:(1)幅相频率特性曲线:又称奈奎斯特(Nyquist )曲线或极坐标图。
它是以ω为参变量,以复平面上的矢量表示)(ωj G 的一种方法。
(2)对数频率特性曲线:又称伯德(Bode )图。
这种方法用两条曲线分别表示幅频特性和相频特性。
横坐标为ω,按常用对数lg ω分度。
对数相频特性的纵坐标表示)(ωϕ,单位为“°”(度)。
而对数幅频特性的纵坐标为)(lg 20)(ωωA L =,单位为dB 。
(3)对数幅相频率特性曲线:又称尼柯尔斯曲线。
该方法以ω为参变量,)(ωϕ为横坐标,)(ωL 为纵坐标。
3. 典型环节的频率特性及最小相位系统 (1)惯性环节:惯性环节的传递函数为11)(+=Ts s G 其频率特性 11)()(+===j T s G j G j s ωωω·146·对数幅频特性 2211lg20)(ωωT L +=(5.1)其渐近线为⎩⎨⎧≥-<=1 )lg(2010)(ωωωωT T T L a (5.2) 在ωT =1处,渐近线与实际幅频特性曲线相差最大,为3dB 。
对数相频特性)(arctg )(ωωϕT -= (5.3)其渐近线为⎪⎩⎪⎨⎧≥︒-<≤+<=10 90101.0 )lg(1.0 0)(ωωωωωϕT T T b a T a (5.4)当ωT =0.1时,有b a b a -=+=1.0lg 0 (5.5)当ωT =10时,有b a b a +=+=︒-10lg 90 (5.6)由式(5.5)、式(5.6)得︒=︒-=45 45b a因此:⎪⎩⎪⎨⎧≥︒-<≤︒-<=10 90101.0 )10lg(451.0 0)(ωωωωωϕT T T T a (5.7)(2)振荡环节:振荡环节的传递函数为10 121)(22<<++=ξξTs S T s G·147·其频率特性)1(21|)()(22ωωξωωT j Ts s G j G j s -+=== 对数幅频特性2222224)1(lg 20)(ωξωωT T L +--= (5.8)其渐近线为⎩⎨⎧≥-<=1)lg(4010)(ωωωωT T T L a (5.9) 当707.0<ξ时,在221ξω-=T 处渐近线与实际幅频特性曲线相差最大,为2121lg20ξξ-。