金属的杨氏模量的测量
- 格式:doc
- 大小:495.50 KB
- 文档页数:14
测定金属的杨氏模量实验日期:2014年3月4日星期二下午姓名:一、CCD成像测定杨氏模量:实验目的:(1)用金属丝的伸长测定杨氏模量;(2)用CCD成像系统测量微小长度变化;(3)用逐差法、作图法和最小二乘法处理数据。
实验仪器:测定杨氏模量专用支架,显微镜,CCD CAMERA 型号WAT-308A DC+12V(CCD摄像机,监视器),米尺(带有卡口),螺旋测微器(分度0.01mm,量程0-25mm),电子天平(精度0.01g)实验原理:(1)由胡克定律我们知道在弹性限度内:σ=Eε,其中σ是应力,E为杨氏模量,ε为应变。
那么对于截面积为S,长为L,在力F作用下形变δL时,有如下关系:E=FL SδLF,S,L比较容易测量,但是δL比较微小难以测量,所以实验中用CCD成像进行观察和直接测量。
则由此可以测定杨氏模量E。
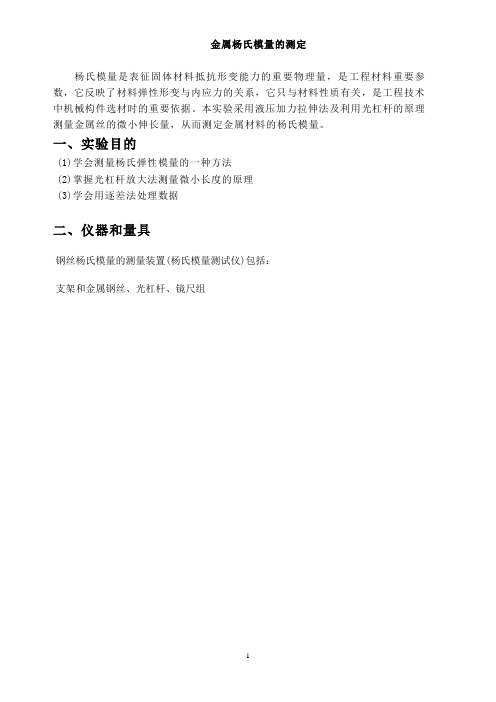
(2)CCD与主体实验装置如右图所示:实验中先使用显微镜M把确定金属丝下端所挂圆柱体上的细横线放大,同时通过不随金属丝伸长而移动的M内部分划板上的刻度线作为刻线高低的高度标准。
然后利用CCD成像进行观察。
实验内容与数据处理:1、认识和调节仪器:(1)预热CCD显示屏,调节支架S竖直,调节钳形平台的两边螺丝的松紧,使得钳形平台既可以很好的限制金属丝的转动又不用造成过多的摩擦干扰。
(2)先调节显微镜目镜,看清清晰的分划板像,然后调节物镜与金属丝下挂的圆柱上的细横线的远近,使得可以同时看清分划板和细横线的像(3)打开和连接CCD,放置在显微镜后较近的位置,仔细调节位置使得分划板像清晰,此时也可微调显微镜目镜。
然后调节显微镜的前后位置旋钮,使得细横线也变清晰。
(此时要注意微调显微镜前后的旋钮时要对应移动CCD的前后,保持分划板的清晰)反复调节可以得到分划板和细横线都比较清晰的像。
2、观测金属丝受外力拉伸后的变化:在砝码盘上一次加砝码,质量约为200.0g(需要具体重新测定精确值)。
金属丝伸长后读出对应的读数r i (i=1,2…9),再加上一个略轻砝码,再一次减去砝码,读出r i ′:表中已用逐差法进行计算得到平均加四个砝码产生的伸长量与加的重量。

金属杨氏模量的测定杨氏模量是表征固体材料抵抗形变能力的重要物理量,是工程材料重要参数,它反映了材料弹性形变与内应力的关系,它只与材料性质有关,是工程技术中机械构件选材时的重要依据。
本实验采用液压加力拉伸法及利用光杠杆的原理测量金属丝的微小伸长量,从而测定金属材料的杨氏模量。
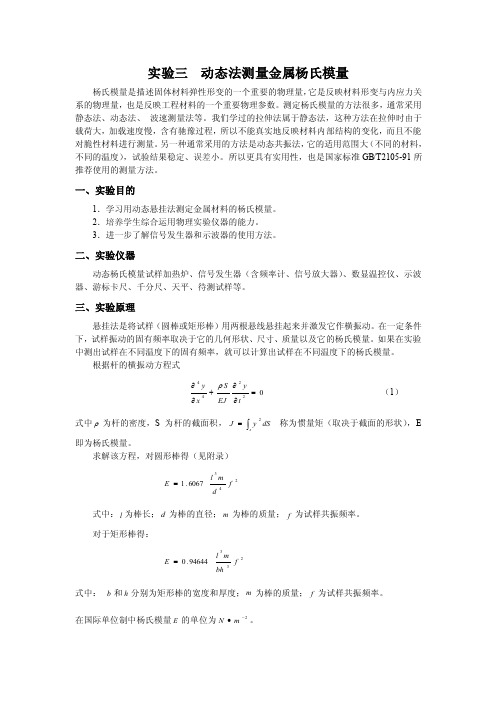
一、实验目的(1)学会测量杨氏弹性模量的一种方法(2)掌握光杠杆放大法测量微小长度的原理(3)学会用逐差法处理数据二、仪器和量具钢丝杨氏模量的测量装置(杨氏模量测试仪)包括:支架和金属钢丝、光杠杆、镜尺组图 1 : 杨氏模量测试仪由支架、待测金属钢丝、上端夹具、管制器、平台、砝码、光杠杆、镜尺组等组成。
主要观察金属丝的弹性形变规律,学习用静力拉伸法测杨氏模量。
图 2 : 支架和金属钢丝待测钢丝长约1米左右,上端夹紧悬挂于支架顶部,下端夹在管制器中,支架中部有一平台,平台中有一圆孔,管制器能在孔中上下移动,砝码加在管制器下的码钩上,钢丝受到拉力而伸长。
图 3 : 光杠杆由带框的平面镜、杠杆及支架组成。
光杠杆为几何光学测量仪器,常配合尺读望远镜和其它一些测量仪器,测量微小的位变,如长度的变化等。
图 4 : 光杠杆(背面)图 5 : 镜尺组由调焦望远镜、标尺、支架、锁紧手轮组成。
图 6 : 调焦望远镜调焦望远镜由微调螺丝、视度圈、调焦手轮组成,主要是观察金属丝的弹性形变(即伸长量)。
三、实验原理任何物体(或材料)在外力作用下都会发生形变。
当形变不超过某一限度时,撤走外力则形变随之消失,为一可逆过程,这种形变称为弹性形变,这一极限称为弹性极限。
超过弹性极限,就会产生永久形变(亦称塑性形变),即撤去外力后形变仍然存在,为不可逆过程。
当外力进一步增大到某一点时,会突然发生很大的形变,该点称为屈服点,在达到屈服点后不久,材料可能发生断裂,在断裂点被拉断。
人们在研究材料的弹性性质时,希望有这样一些物理量,它们与试样的尺寸、形状和外加的力无关。
实验三 动态法测量金属杨氏模量杨氏模量是描述固体材料弹性形变的一个重要的物理量,它是反映材料形变与内应力关系的物理量,也是反映工程材料的一个重要物理参数。
测定杨氏模量的方法很多,通常采用静态法、动态法、 波速测量法等。
我们学过的拉伸法属于静态法,这种方法在拉伸时由于载荷大,加载速度慢,含有驰豫过程,所以不能真实地反映材料内部结构的变化,而且不能对脆性材料进行测量。
另一种通常采用的方法是动态共振法,它的适用范围大(不同的材料,不同的温度),试验结果稳定、误差小。
所以更具有实用性,也是国家标准GB/T2105-91所推荐使用的测量方法。
一、实验目的1.学习用动态悬挂法测定金属材料的杨氏模量。
2.培养学生综合运用物理实验仪器的能力。
3.进一步了解信号发生器和示波器的使用方法。
二、实验仪器动态杨氏模量试样加热炉、信号发生器(含频率计、信号放大器)、数显温控仪、示波器、游标卡尺、千分尺、天平、待测试样等。
三、实验原理悬挂法是将试样(圆棒或矩形棒)用两根悬线悬挂起来并激发它作横振动。
在一定条件下,试样振动的固有频率取决于它的几何形状、尺寸、质量以及它的杨氏模量。
如果在实验中测出试样在不同温度下的固有频率,就可以计算出试样在不同温度下的杨氏模量。
根据杆的横振动方程式02244=∂∂+∂∂tyEJS xy ρ (1)式中ρ为杆的密度,S 为杆的截面积,⎰=sdS y J 2称为惯量矩(取决于截面的形状),E即为杨氏模量。
求解该方程,对圆形棒得(见附录)2436067.1fdm l E =式中:l 为棒长;d 为棒的直径;m 为棒的质量;f 为试样共振频率。
对于矩形棒得:23394644.0fbhm l E =式中: b 和h 分别为矩形棒的宽度和厚度;m 为棒的质量;f 为试样共振频率。
在国际单位制中杨氏模量E 的单位为2-∙mN 。
本实验的基本问题是测量在一定温度下试样的固有频率f 。
实验中采用如图1所示装置。

金属丝杨氏模量的测定实验报告【实验目的】1. 学会测量杨氏模量的一种方法,掌握“光杠杆镜”测量微小长度变化的原理。
2. 学会用“对称测量”消除系统误差。
3. 学习如何依实际情况对各个测量量进行误差估算。
4. 练习用逐差法和作图法处理实验数据。
【实验仪器】杨氏模量仪测量仪、钢卷尺、螺旋测微器、望远镜(附标尺)、游标卡尺、砝码等。
【实验原理】(一)、设金属丝的原长L ,横截面积为S ,沿长度方向施力F 后,其长度改变ΔL ,则金属丝单位面积上受到的垂直作用力F/S 称为正应力,金属丝的相对伸长量ΔL/L 称为线应变。
实验结果指出,在弹性范围内,由胡克定律可知物体的正应力与线应变成正比,即LL E S F ∆= (1) 则LS FL E ∆= (2) 比例系数即为杨氏弹性模量。
国际单位制单位为-2m ⋅N 。
在它表征材料本身的性质,越大的材料,要使它发生一定的相对形变所需要的单位横截面积上的作用力也越大。
本实验测量的是钢丝的杨氏弹性模量,如果钢丝直径为,则可得钢丝横截面积则(2)式可变为 Ld FL E ∆=24π (3)可见,只要测出式(3)中右边各量,就可计算出杨氏弹性模量。
式中(金属丝原长)可由米尺测量,(钢丝直径),可用螺旋测微仪测量,F (外力)可由实验中钢丝下面悬挂的砝码的重力F=求出,而ΔL 是一个微小长度变化(在此实验中 ,当L ≈1m时,F 每变化1kg 相应的ΔL 约为0.3mm)。
因此,本实验利用光杠杆的光学放大作用实现对钢丝微小伸长量ΔL 的间接测量。
(二)、尺读望远镜和光杠杆组成测量系统。
光杠杆系统是由光杠杆镜架与尺读望远镜组成的。
光杠杆结构实际上是附有三个尖足的平面镜。
三个尖足的边线为一等腰三角形。
前两足刀口与平面镜在同一平面内(平面镜俯仰方位可调),后足在前两足刀口的中垂线上。
尺读望远镜由一把竖立的毫米刻度尺和在尺旁的一个望远镜组成。
将光杠杆和望远镜放置好,按仪器调节顺序调好全部装置后,就会在望远镜中看到经由光杠杆平面镜反射的标尺像。

金属材料杨氏模量的测定实验报告引言:金属材料的机械性能是评价其质量和应用价值的重要指标之一,而杨氏模量是描述材料刚度和变形能力的重要参数。
杨氏模量可以通过实验方法来测定,本实验旨在通过悬臂梁挠度法来测定金属材料的杨氏模量。
实验器材和试样:本实验所使用的实验器材包括:悬臂梁、电子天平、千分尺、刻度尺、电源等。
试样为金属材料的长方体棒材。
实验原理:悬臂梁挠度法是一种常用的测量杨氏模量的方法。
当一个悬臂梁受到外力作用时,悬臂梁会发生弯曲变形,形成一个弯曲曲线。
利用悬臂梁的挠度和外力之间的关系,可以计算出杨氏模量。
实验步骤:1. 将待测金属材料的长方体棒材固定在悬臂梁上,使其成为一个悬臂梁系统。
2. 首先,使用电子天平和千分尺等仪器对悬臂梁的质量和尺寸进行精确测量,并记录下来。
3. 调整电源,施加适当的外力到悬臂梁上,使其产生弯曲变形。
4. 使用刻度尺等工具测量悬臂梁的挠度,记录下来。
5. 根据悬臂梁的几何参数、外力和挠度之间的关系,计算出杨氏模量。
实验结果和分析:根据实验数据和计算公式,我们可以得到待测金属材料的杨氏模量。
在实验过程中,我们可以通过调整施加的外力和观察悬臂梁的挠度来验证计算结果的准确性。
如果实验结果与理论值相符,则说明实验测定的杨氏模量是准确的。
实验误差和改进:在实验过程中,由于测量仪器的精度和操作技巧等因素的影响,可能会引入一定的误差。
为了减小误差,可以采取以下改进措施:1. 使用更加精密的仪器来测量悬臂梁的质量和尺寸,以提高测量结果的准确性。
2. 进行多次实验,取平均值,以减小个别实验数据的误差对最终结果的影响。
3. 在施加外力时,要注意力的均匀施加,避免产生不均匀的变形,从而影响测量结果的准确性。
实验应用:杨氏模量是评价金属材料力学性能的重要参数,对于材料的选取、设计和应用具有重要意义。
通过测定杨氏模量,可以评估材料的刚性、强度和变形能力,为工程设计和材料选择提供依据。
结论:通过悬臂梁挠度法测定金属材料杨氏模量的实验,可以得到准确的杨氏模量值。
金属丝杨氏模量的测量实验报告实验目的:本实验旨在通过测量金属丝的杨氏模量,掌握金属丝杨氏模量的测量方法,加深对金属材料力学性能的理解。
实验仪器与设备:1. 金属丝。
2. 悬挂物。
3. 千分尺。
4. 螺旋测微器。
5. 电子天平。
6. 螺旋测微器。
7. 螺旋测微器。
实验原理:杨氏模量是描述材料刚性和弹性的物理量,是材料的一项重要力学性能参数。
实验中,我们利用金属丝的弹性变形来测量其杨氏模量。
当外力作用在金属丝上时,金属丝会发生形变,根据胡克定律,应变与应力成正比。
利用这一原理,我们可以通过测量金属丝的应变和受力情况,计算出杨氏模量。
实验步骤:1. 准备金属丝和悬挂物,将悬挂物挂在金属丝上。
2. 利用千分尺测量金属丝的直径,并记录下来。
3. 用螺旋测微器测量金属丝的长度,并记录下来。
4. 用电子天平测量悬挂物的质量,并记录下来。
5. 施加一定的拉力,测量金属丝的伸长量,并记录下来。
6. 根据实验数据,计算金属丝的应变和应力。
7. 利用应变和应力的关系,计算金属丝的杨氏模量。
实验结果与分析:通过实验测得金属丝的直径为0.5mm,长度为2m,悬挂物的质量为100g,施加拉力后金属丝的伸长量为0.02m。
根据实验数据计算得到金属丝的应变为0.01,应力为100N/m²。
根据应变和应力的关系公式,计算得到金属丝的杨氏模量为2.5×10^11N/m²。
结论:通过本次实验,我们成功测量了金属丝的杨氏模量,并得到了较为准确的结果。
实验结果表明,金属丝的杨氏模量为2.5×10^11N/m²。
这一结果与金属材料的性能参数相符,说明本次实验取得了较好的实验效果。
同时,通过本次实验,我们也加深了对金属材料力学性能的理解,为今后的科研工作和工程实践提供了重要的参考。
实验中可能存在的误差:1. 测量金属丝直径和长度时,仪器的精度和人为操作误差可能会对结果产生影响。
2. 电子天平的测量精度和悬挂物的形状、密度等因素可能会对悬挂物质量的测量结果产生影响。
金属杨氏模量测量实验报告一、实验目的1、学习用拉伸法测量金属丝的杨氏模量。
2、掌握用光杠杆法测量微小长度变化的原理和方法。
3、学会使用望远镜和标尺测量长度。
4、学习数据处理和误差分析的方法。
二、实验原理1、杨氏模量的定义杨氏模量是描述固体材料抵抗形变能力的物理量。
对于一根长度为$L$、横截面积为$S$的金属丝,在受到沿长度方向的拉力$F$作用时,其伸长量为$\Delta L$。
根据胡克定律,在弹性限度内,应力与应变成正比,即$F/S = E \times (\Delta L/L)$,其中$E$就是杨氏模量。
2、光杠杆原理光杠杆是一个带有三个尖足的平面镜,前两尖足放在一个固定的平台上,后尖足放在金属丝的测量端。
当金属丝发生微小伸长时,光杠杆后尖足随之移动,带动平面镜转动一个微小角度$\theta$。
通过望远镜和标尺可以观测到平面镜反射的标尺像的移动,从而测量出微小的长度变化。
根据几何关系,有$\tan\theta =\Delta n / D$,其中$\Deltan$是标尺像的移动距离,$D$是望远镜到平面镜的距离。
又因为$\theta$很小,所以$\tan\theta \approx \theta$。
同时,$\theta =\Delta L / b$,其中$b$是光杠杆前后尖足的距离。
联立可得:$\Delta L = b \times \Delta n / D$将其代入杨氏模量的公式$E = F \times L /(S \times \Delta L)$,可得:$E = 8FLD /(S\pi d^2 \Delta n b)$,其中$d$是金属丝的直径。
三、实验仪器杨氏模量测量仪、光杠杆、望远镜、标尺、砝码、螺旋测微器、米尺等。
四、实验步骤1、调节仪器(1)将杨氏模量测量仪的底座调水平,使金属丝竖直。
(2)将光杠杆放在平台上,使其前两尖足与平台的沟槽对齐,后尖足与金属丝的测量端接触良好。
(3)调整望远镜和标尺的位置,使通过望远镜能清晰地看到标尺的像。
实验五 金属杨氏弹性模量的测量一、实验目的1.测定金属丝的杨氏模量并理解测量原理。
2.掌握测量长度微小变化的光杠杆法。
3.学习用逐差法和作图法处理数据。
二、实验仪器伸长法杨氏模量测定仪一套(包括支架,反光镜,尺读望远镜,砝码),测微螺旋计等。
三、实验原理有一均匀的金属丝(或棒),长为L ,横截面积为S ,丝之一端固定,另一端施以拉力P ,结果伸长了∆L 。
若用相对伸长∆L /L 表示其形变,则根据虎克定律:在弹性限度内,伸长形变与胁强P /S 成正比即S P E L L ⨯=∆1 或LS PLE ∆= (5-1) 式中E 为金属丝的杨氏模量,它表征材料的强度性质,只与材料的质料有关,而与材料的形状大小无关。
并且在数值上,E 等于相对伸长为1时的胁强,所以它的单位与胁强的单位相同。
光杠杆由平面反射镜、前足、后足组成,如图5-1所示。
用光杠杆法测量∆L :实验装置如图5-2,光杠杆是在由一刀片和与刀片垂直的金属杆(后足)组成的成“⊥”形的底座上直立放置一平面镜而构成的,(有的光杠杆将刀片换成两个“足”,所以光杠杆也称为三足镜),使用时刀片(或前足)放在平台上,后足放在平台小园孔中用于夹紧金属丝的夹头上,若系统已调节到最佳状态,通过望远镜可以从小镜中看到附在望远镜架上的标尺的像,利用望远镜内的分划板上的叉丝a 、b (或b 、c )在标尺像上的读数之差再乘100,即得标尺到平面镜镜面的距离D ,如图中园内部分所示。
当金属丝的初负荷(为了拉直金属丝所加的砝码重量)为P 0时,叉丝b (或a 、c )在标尺上的示数为x 0,若增加一重量P ,设长为L 的金属丝伸长了∆L ,光杠杆后足就下降了∆L 见图5-2,则平面镜以刀口线为轴旋转了φ角。
由光学的反射定律可知,入射线与反射线之间的夹角为2φ,于是叉丝b (或a 、c )移到了标尺上的x 处,当φ角甚小时,根据图中的几何关系有d L ϕ=∆ Dx x 02-=ϕ Dx x d L 2)(0-=∆∴ (5-2)式中d 为光杠杆后足足尖到刀口线的垂直距离,D 为平面镜到标尺的距离。
WORD格式 专业技术 整理分享 金属的杨氏模量的测量 当固体受外力作用时,它的体积和形状将要发生变化,这种变化,称为形变。当外力不太大时,物体的形变与外力成正比,且外力停止作用物体立即恢复原来的形状和体积,这种形变称为弹性形变。当外力较大时,物体的形变与外力不成比例,且外力停止作用,物体形变不能恢复原来的形状和体积,这种形变称为范性形变。范性形变的产生,是由于物体形变而产生的内应力超过了物体的弹性限度的缘故。如果再继续增大外力,物体内产生的内应力将会超过物体的强度极限时,物体便被破坏了。 固体材料的弹性形变可以分为纵向、切变、扭转、弯曲等,对于纵向弹性形变可以引入杨氏模量来描述材料抵抗形变的能力。杨氏模量是反映材料形变与内应力关系的一个重要的物理量。杨氏模量越大,越不易发生形变。杨氏模量一般只与材料的性质和温度有关,与其几何形状无关。材料杨氏模量测量方法很多,有静态法和动态法。对于静态法来说,又可分为拉伸法和弯曲法。
Ⅰ. 拉伸法测定钢丝的杨氏弹性模量 【实验目的】 1. 学会用拉伸法测定钢丝的杨氏弹性模量。 2. 掌握几种长度测量工具的使用方法及其不确定度的分析和计算。 3. 进一步掌握逐差法、作图法和最小二乘法的数据处理方法。。
【实验仪器】 杨氏模量测量仪、螺旋测微器、钢卷尺、读数显微镜装置等。 【实验原理】 一、拉伸法测金属丝的杨氏弹性模量 设有一根粗细均匀的金属丝,长度为L,截面积为S,将其上端紧固,下端悬挂质量为m的砝码。当金属丝受外力Fmg作用而发生形变L时,金属丝受外力作用发生形变而产生的内应力SF,其应变为LL,根据虎克WORD格式 专业技术 整理分享 定律有:在弹性限度内,物体的应力SF与产生的应变成正比,即 LLESF (Ⅰ.1)
式中E为比例恒量,将上式改写为 ELSFL (Ⅰ.2)
其中E为该材料的杨氏弹性模量(又称杨氏模量),在数值上等于产生单位应变的应力。实验证明,杨氏模量E与外力F、金属丝的长度L、横截面积S的大小无关,它只与制成金属丝的材料有关。 若金属丝的直径为d,则241dS,将其代入(Ⅰ.2)式中可得
LdLFE2
4
(Ⅰ.3)
(Ⅰ.3)式表明,在长度、直径和所加外力相同的情况下,杨氏模量大的金属丝伸长量较小,杨氏模量小的金属丝伸长量较大。因此,杨氏模量反映了材料抵抗外力引起的拉伸(或压缩)形变的能力。实验中,测量出F、L、d和L值就可以计算出金属丝的杨氏模量E。其中F、L、d都可用一般方法测得,唯有L是一个微小的变化量,约mm110数量级,用普通量具如钢尺或游标卡尺是难以测准的。因此,实验的核心问题是对微小变化量L的测量。在本实验中用读数显微镜测量(也可利用光杠杆法或其他方法测量)
二、杨氏模量测量仪 杨氏模量测量仪的基本结构如图1所示。在一个较重的三脚底座上固定有两根立柱,支柱上端有横梁,中部紧固一个平台,构成一个刚度极好的支架。整个支架受力后变形极小,可以忽略。通过调节三角底座的水平调节螺母13使整个支架铅直。待测样品是一根粗细均匀的金属丝(长约90cm)。金属丝上端用上端紧固座2夹紧并固定在上横梁上,钢丝下端也用一个钳形平台5夹紧并穿过平台的中心孔,使金属丝自由悬挂。钢丝的总长度L就是从上端固定座2的下端面至钳形平台5的上端面之间的长度。钳形平台5下方的挂钩上挂一个砝码盘,当盘上逐次加上一定质量的砝码后,钢丝就被拉伸,标尺刻线6也跟着下降。读数标尺9相对WORD格式 专业技术 整理分享 钳形平台5的下降量,即是钢丝的伸长量L。 读数显微镜装置由测微目镜(详见附件)、带有物镜的镜筒以及可以在导轨上前后移动的底座组成。
1. 金属丝上端锁紧螺母; 2. 上端固定座; 3. 待测金属丝; 4. 测量仪立柱; 5. 钳形平台; 6. 限位螺钉; 7. 金属丝下端锁紧螺母; 8. 砝码盘; 9. 读数标尺; 10. 读数显微镜;11. 测微目镜支架锁紧螺钉; 12. 导轨; 13. 测量仪水平调节螺母。 图Ⅰ.1 杨氏模量测量仪
【实验内容】 一、仪器的调整 1.调节底脚螺母,使仪器底座水平(可用水准器),测试仪立柱铅直,使金属丝下端的小圆柱与钳形平台无摩擦地上下自由移动,旋紧金属丝上端的固定座,使圆柱两侧刻槽对准钳形平台两侧的限位螺钉,两侧同时对称地将限位螺钉旋入刻WORD格式 专业技术 整理分享 槽中部,在减小摩擦的同时,又能避免发生扭转和摆动现象。 2. 在砝码盘上加100g砝码,使金属丝被拉直(这些重量不计算在外力内,此时钢丝为原长L); 3. 调节测微目镜,使眼睛能够看到清晰的分划板像。再将物镜对准小圆柱平面中部刻线,调节显微镜前后距离,直到看清小圆柱平面中部刻线的像。同时,稍微旋转显微镜,确保分划板中读书标尺线与刻线像完全平行,并消除视差(详见实验3.15 附件2),最后锁定显微镜底座。注意:因读数显微镜成倒像,所以待测金
属丝受力伸长时,视场内的十字叉丝像向上移动,金属丝回缩时,十字叉丝向下移动。
二、测量 1.先记下未加砝码时水平叉丝对准的标尺刻度n0;然后逐次加质量为50g砝码,直到450g。每加一个砝码后,要等系统稳定下来再记录显微镜中的读数in;然后逐次取下砝码,直至取完所加砝码,每取下一个砝码时等稳定后记下望远镜中每次相应的读数in。 2. 用螺旋测微器测量钢丝直径d,在不同部位测量五次。 3. 用钢卷尺分别测量钢丝原长L,测量一次。
【注意事项】 1. 不能用手触摸显微镜的镜面。调节显微镜时一定要消除视差,否则会影响读数的正确性; 2. 实验系统调节好后,在实验过程中绝对不能对系统的任一部分进行任何调整。否则,所有数据将得重新测量; 3. 加减砝码时,要轻拿轻放以免钢丝摆动;同时,应注意砝码的各槽口,应相互错开,防止因受力不均,而使砝码掉落; 4. 待测钢丝不能扭折。实验完毕后,应将砝码取下,以防止钢丝疲劳。
【数据记录及处理】 1. 数据测量记录 WORD格式 专业技术 整理分享 单次测量量L的记录: 钢丝的原长L= 注:mmLins50.0)(。 表Ⅰ.1 钢丝直径测量数据 螺旋测微器零点读数= 序号 1 2 3 4 5 平均 d/mm 注:mmdins004.0)(。 表Ⅰ.2 加外力后标尺的读数 序号 1 2 3 4 5 6 7 8 9 10 m/g
0 50 100 150 200 250 300 350 400 450
in/mm
in/mm
in/mm 其中,)(21iiinnn,in是每次增加50g砝码时标尺的读数,in是每次减少50g砝码时标尺的读数。
2. 数据处理 (1)用隔项逐差法(组差法)处理数据,求C及其不确定度。 iCC
5
1,而iiinnC5。
注:mmCins004.0)(。
(2)由公式CdFLE24和gMF,计算钢丝的杨氏模量及其不确定度,并写出结果表达式。注意:由于采用了逐差法,此处g250M。 由公式(3)可推导出杨氏模量的相对不确定度的公式为 WORD格式 专业技术 整理分享 222))(())(2())(()(CCudduLLuEEu (Ⅰ.4)
(3)将实验测得的E与公认值21101000.2mNE进行比较,求其百分差。 (4)用图解法和最小二乘法对数据进行处理,并与逐差法进行比较。
Ⅱ.霍尔传感器的定标和弯梁法测量杨氏模量 【实验目的】 1. 熟悉霍尔位置传感器的特性,掌握微小位移的非电量测量方法; 2. 用弯梁法测量金属的杨氏模量; 3. 掌握几种长度测量工具的使用方法及其不确定度的分析和计算。 4. 进一步掌握逐差法、作图法和最小二乘法的数据处理方法。
【实验仪器】 霍尔位置传感器测杨氏模量装置,霍尔位置传感器输出信号测量仪,米尺,游标卡尺,螺旋测微器,砝码,待测材料等。
【实验原理】 随着科学技术的发展,微小位移量的测量方法和技术越先进,本实验通过霍尔位置传感器的输出电压与位移量线形关系的定标从而实现对于微小位移量的测量。
1. 霍尔位置传感器 霍尔元件置于磁感应强度为B的磁场中,在垂直于磁场方向通以电流I,则与这二者相垂直的方向上将产生霍尔电势差HU: BIKUH (Ⅱ.1)
式(1)中K为元件的霍尔灵敏度。如果保持霍尔元件的电流I不变,而使其在一个均匀梯度的磁场中位移Z时,则输出的霍尔电势差变化量为: ZdZdBIKUH (Ⅱ.2) WORD格式 专业技术 整理分享 式(2)中Z为位移量,此式说明若dZdB为常数时,HU与Z成正比。 为实现均匀梯度的磁场,可以如图Ⅱ.1所示,两个结构相同的直流磁路系统共同形成一个沿Z轴的梯度磁场。为使磁隙中的磁场得到较好的线性分布,一般采用两块相同的磁铁(磁铁截面积及表面磁感应强度相同)相对放置,即N极与N极相对,在磁极端面装有特殊形式的 极靴。两磁铁之间留一等间距间隙,霍尔元件平 图Ⅱ.1 霍尔传感器工作原理图 行于磁铁放在该间隙的中轴上。间隙大小要根据测量范围和测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就越高。磁铁截面要远大于霍尔元件,以尽可能的减小边缘效应影响,提高测量精确度。 若磁铁间隙内中心截面处的磁感应强度为零,霍尔元件处于该处时,输出的霍尔电势差应该为零。当霍尔元件偏离中心沿Z轴发生位移时,由于磁感应强度不再为零,霍尔元件也就产生相应的电势差输出。霍尔电势V 取决于其在磁场中的位移量Z,其大小可以用电压表测量。因此,测得霍尔电势的大小便可获知霍尔元件的静位移。霍尔电势差与位移量之间存在一一对应关系,当位移量较小(mm2),这一对应关系具有良好的线性,由此可以将霍尔电势差为零时元件所处的位置作为位移参考零点。
2、弯梁法测量杨氏模量 一段金属棒,在其两端沿轴方向施加外力F,其长度L发生形变L,以S
表示横截面面积,称SF为应力,相对长变LL为应变。在弹性限度内,根据胡克定律有:
LLESF
其中E为该材料的杨氏弹性模量(又称杨氏模量),在数值上等于产生单位应变的应力。实验证明,杨氏模量E与外力F、金属棒的长度L、横截面积S的大小无关,它只与制成金属棒的材料性质有关。