计算方法引论-第五章
- 格式:pps
- 大小:414.50 KB
- 文档页数:29
Tel:86613747E-mail:*************授课: 68学分:45.1 问题的提出– 函数解析式未知,通过实验观测得到的一组数据, 即在某个区间[a, b]上给出一系列点的函数值y i = f(x i )– 或者给出函数表x x 0x 1x 2……x n yy 0y 1y 2……y n第五章插值与曲线拟合5.2 插值法的基本原理设函数y=f (x )定义在区间[a, b ]上,是[a, b ]上取定的n+1个互异节点,且在这些点处的函数值 为已知 ,即若存在一个f(x)的近似函数 ,满足则称为f (x )的一个插值函数, f (x )为被插函数, 点x i 为插值节点, 称(5.1)式为插值条件, 而误差函数R(x)= 称为插值余项, 区间[a, b ]称为插值区间, 插值点在插值区间内的称为内插, 否则称外插n x x x ,,,10 )(,),(),(10n x f x f x f )(i i x f y =)(x ϕ),,2,1()()(n i x f x i i ==ϕ)(x ϕ(5.1))()(x x f ϕ-插值函数 在n+1个互异插值节点(i=0,1,…,n )处与 相等,在其它点x 就用的值作为f (x )的近似值。
这一过程称为插值,点x 称为插值点。
换句话说, 插值就是根据被插函数给出的函数表“插出”所 要点的函数值。
用的值作为f (x )的近似值,不仅希望能较好地逼近f (x ),而且还希望它计算简单。
由于代数多项式具有数值计算和理论分析方便的优点。
所 以本章主要介绍代数插值。
即求一个次数不超过n 次的多项式。
)(x ϕi x )(i x f )(x ϕ)(x ϕ)(x ϕ0111)(a x a xa x a x P n n n n ++++=--111)(a x a xa x a x P n n n n ++++=-- 满足),,2,1,0()()(n i x f x P i i ==则称P(x)为f(x)的n次插值多项式。
第五章现代优化计算方法第五章现代优化计算方法§5.1 引言§5.2 计算复杂性和启发式算法的概念§5.3 模拟退火优化算法§5.4 遗传优化算法§5.5 神经网络优化算法§5.6 混合优化算法§5.1常规优化算法 Powell法、梯度法引言随机方向搜索法、复合形法、惩罚函数法启发式算法适于求解高非线性、多约束、多极值问题现代优化算法:模拟退火算法(Simulated annealing)遗传算法(Genetic algorithms)神经网络优化算法(Neural networks optimization)混合优化算法(Hybrid optimization)§5.2 计算复杂性和启发式算法一.计算复杂性由于计算时间和存储空间的局限,某些算法在实践中不一定能得到解算法的复杂性算法的求解方法造成(例:求二阶导数)问题的复杂性问题本身求解的复杂造成求解问题的规模(维数)n 对复杂性的影响二.启发式算法是相对于有严格数学背景的数学规划优化算法提出的。
有严格数学背景——梯度法、坐标轮换法、Powell法是基于直观或经验构造的算法,在可接受的花费(指计算时间和空间)内寻找最好的解,但不能保证所得的解就是最优解,以及此解与最优解的近似程度。
通过揭示和模拟自然现象和过程,并综合数学、物理学、生物进化、人工智能、神经科学和统计学等所构造的算法。
也称构造型算法、智能优化算法。
§5.3 模拟退火优化算法一. 物理背景:固体退火的物理过程和统计性质:(1)加温:随温度升高,粒子能量增高,与平衡位置的距离增大(2)等温:温度升至熔解温度,固体的规则性被打破,成为液体,粒子可以自由运动和重新排序,消除系统中原先存在的非均匀状态(3)冷却:随着温度的下降,粒子能量减弱,运动减小粒子最终进入平衡态,固化为具有最小能量的晶体温度 t 下,分子停留在某一状态 r 满足 Bolztmann 概率分布:P E = E (r ) ={}1 ? E (r ) ? exp ? ? ? z (t ) kt ? ?其中: E(r) ——状态r的能量 k ——常数 E ——分子能量的一个随机变量 z(t) ——概率分布的标准化因子 D0 ——最低能量状态的个数 D ——状态空间中状态的个数物理退火 E(r) E(rmin)优化设计 f(x) f (x*)分子停留在某种能量状态的概率与温度成反比随着温度 t 不断降低,分子停留在低能量状态的概率不断增大相同温度下,分子停留在低能量状态的概率要更大二. 基本思想:状态迁移准则( Metropolis 抽样稳定性条件):Ei ? E j exp ? ? kt ? ? ≥ random ( 0,1) ?若新状态 j 的能量满足条件,则被用来替代原状态 i。
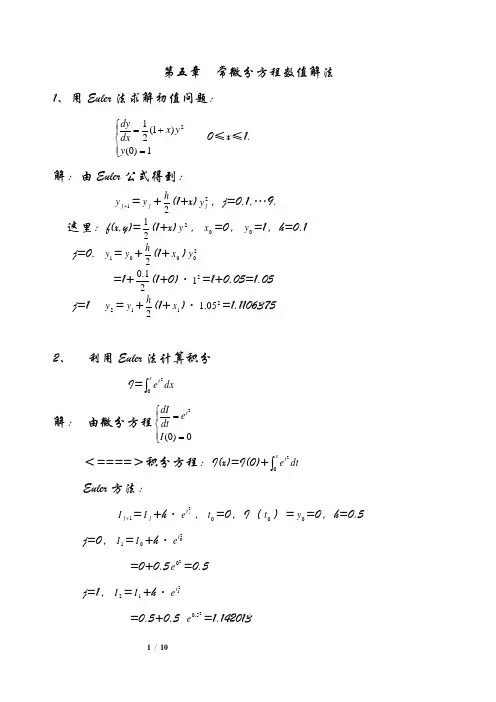
第五 常微分方程数值解法1、 用Euler 法求解初值问题:⎪⎩⎪⎨⎧=+=1)0()1(212y y x dx dy 0≤x ≤1.解:由Euler 公式得到:1+j y =j y +2h(1+x)2j y ,j=0,1,…9.这里:f(x,y)=21(1+x)2y ,0x =0,0y =1,h=0.1j=0, 1y =0y +2h (1+0x )20y=1+21.0(1+0)〃21=1+0.05=1.05j=1 2y =1y +2h (1+1x )〃205.1=1.11063752、 利用Euler 法计算积分I=dx e xt⎰02解:由微分方程⎪⎩⎪⎨⎧==0)0(2I edtdI t<====>积分方程:I(x)=I(0)+dt e xt ⎰02Euler 方法:1+j I =j I +h 〃2jt e,0t =0,I (0t )=0y =0,h=0.5j=0,1I =0I +h 〃2t e =0+0.520e =0.5j=1,2I =1I +h 〃21t e=0.5+0.55.0e =1.142013j=2,3I =2I +h 〃22t e =1.142013+0.5〃21e =2.501154j=3,4I =3I +h 〃23t e =2.501154+0.525.1e =7.2450223、 用Euler 方法与改进的Euler 方法求解⎩⎨⎧=-=1)0(2'y xy y y 0≤x ≤1解:f(x,y)=y-x 2y ,取步长h=0.1,精确解为y=xe x -+-211(1) Euler 方法: 1+j y =j y +h 〃(j y -j x 2j y )j=0,1y =0y +h 〃(0y -0x 2y ) =1+0.1(1-21.0)=1.1 j=1,2y =1y +h 〃(1y -1x 21y )=1.1+0.1(1.1-0.1×21.1)=1.1979 (2)改进的Euler 方法:⎪⎩⎪⎨⎧-+-+=-+=+++++)]()[(2)(2111212____1j j j j j j j j j j j j j y x y y x y h y y y x y h y y j=0, ⎪⎩⎪⎨⎧-+-+=-+=)]()[(2)(211__120000120000__1y x y y x y h y y y x y h y y⎪⎩⎪⎨⎧=-+-+==-+=09895.1))]1.1(1.01.1()1.01[(21.011.1)1.01(1.012212__1y y j=1,⎪⎩⎪⎨⎧-+-+=-+=)]()[(2)(2__22__221111221111__2y x y y x y h y y y x y h y y⎪⎩⎪⎨⎧=-+-+==-+=193375.1))]196768.1(2.0196768.1())09895.1(1.009895.1[(21.009895.1196768.1))09895.1(1.009895.1(1.009895.12222__2y y4、 用梯形方法解初值问题:⎩⎨⎧==+1)0(0'y y y证明:其近似解为n y =nh h ⎪⎭⎫⎝⎛+-22,并证明:当h →0时,它收敛于原始问题的精确解y=x e -。
第5章多自由度系统的数值计算方法在工程实践中,我们经常会遇到多自由度系统(Multiple Degree of Freedom,简称MDOF)的问题,例如振动台、建筑结构等。
这些系统通常由多个自由度所组成,因此其运动方程会比单自由度系统更加复杂。
因此,我们需要使用数值计算方法来求解这些系统。
在本章中,我们将介绍两种常见的数值计算方法,包括直接积分法和模态叠加法。
一、直接积分法直接积分法,也称为时步法或时间积分法,是一种常用的求解MDOF系统的数值计算方法。
它的基本原理是将多自由度系统的运动方程转换为一组一阶常微分方程。
然后,利用数值积分方法,如欧拉法、Runge-Kutta法等,对这组常微分方程进行求解,得到系统的运动响应。
直接积分法的主要步骤如下:1.确定系统的运动方程:根据多自由度系统的动力学原理,可以得到系统的运动方程。
一般来说,这个方程是非线性方程,通常需要进行线性化处理。
2.将运动方程转化为一阶常微分方程组:将系统的运动方程进行适当的变换,将其转化为一组一阶常微分方程。
这样,就可以使用数值积分方法对其进行求解。
3. 选择数值积分方法:选择适合系统的数值积分方法,例如欧拉法、Runge-Kutta法等。
这些方法的基本思想是将微分方程转化为差分方程,通过迭代来逼近准确解。
4.进行数值计算:根据选择的数值积分方法,进行迭代计算,得到系统的运动响应。
尽管直接积分法是一种广泛应用的数值计算方法,但也存在一些问题。
例如,随着自由度的增加,计算量会大大增加。
此外,由于数值积分方法的局限性,可能会出现数值不稳定、数值发散等问题。
二、模态叠加法模态叠加法是求解MDOF系统的另一种常用数值计算方法。
该方法基于模态分析的思想,将MDOF系统的运动方程转化为一组无耦合的一自由度系统的运动方程。
然后,按照模态响应的叠加原理,将各个模态的响应相加,得到系统的总体响应。
模态叠加法的主要步骤如下:1.确定系统的模态参数:通过模态分析方法,可以得到系统的模态参数,包括模态频率、振型等。
M ■ I■ 4・•,;■<-< Niae .M«RT<Mt I»0o M •* Uw ・ 2 «V 4R■2 •*•・ *、》x ・2 l> — ■ <« pMol nw*w ・《v ・ — RBJftMt ■・: *TIA ,・•"・4r<F・5■•月•» Hl»r 4^MY«VT.•«- rv ・・•«•4 y・■ *~ 珂!•・~0* «v <b«、MW M ■ —24“tkM MA Aft&SK ■MJTV J »■>■!—2 •* _■ 0 ■ WH•■ J W I・m —•・—i u •・«•・・•・EV•■«•»«•••■『—《;<w> MLi^Whv• r.i • £• '• ;4 • ‘•y;J • K•耳・•・• ■•|B|«I •rw«cfw ••h»4fiTv Bv VmMi ■尸♦■•n 2 梆ftWMb W«M«« ■ ■ —I ! /•• Cf 、 41 •A4MA2 •皿< JU>八-D ZyU 33Ew bw <r M0c»v«* <kr E»« n B^ A- rrwu M Or c«e n —d« z. ewe fomtet «e tkmJ TW a. «w Apvitw HI f«・《E.BV0kvTV ra»Mv»|anwoM ,・《■ txt pwMr« tn —rrtr*/-u ?•?-rv 一11";■";• “:••孑丁 g »!-?M gar ■ twin ar], g g■ ■»£ 5. >Ww «><«<•. ■« g C«J ・HM ■»«*♦/ •» * «*r*c4 g ••• k •» *» K«| - » few •- 1.2 K •・ <«l R A MMWW |W KtfY< 1». .I H * tWAM . .«y n«1 ■■ 4 ・•■机■・・Wf ・ |V1«<4*W V • to ・•《■ L«|«T —f b Ji.Hb •.«N»to•3“ ■MTlN ■气 14J 、•歼N taiwv** M> — wwtatovMM tMMU K*t — b •*><«*«. ■ M H M ■ •»Zpavaep ^Mw H tv e>EZ W A CT “ Ul iwVI.0M. JRf •XW/MXTfVWTitlG ・〔MT ,*—•WI T 4"呷■忙Tte ■■・《—arfv ■ IMI ・•—■ J ■ ■ • SMI (MR E vwy 9 y y («■■■•■■■>»< Sc.aeQMM3 •3” tw tew •皿 0 XC H 哪c • t<n “ • fM •*■ at 12 ・「■ ■■N&Ef ・■■・■・】 ・《<"—1・ <a«f»lw ike MM; ■尸.4 ■ *kae hP lb« ra» f*«k mt <»cn hr gw <W-庐v —a 押 9w ■ M E* —r • Wf •• W» 4 • » j”5 ■••<w«M rr 4■Al*•MlKlf Mafrf «MMf tea *■ ■釦 tw£&e<«) ■・・• •%« h. ~ <*^7 g —・《•■ 一 wr ■・・ fl e ・ “ a^<rt«M M■1 «Mrt «iet w •« r ・ i ・tb 林巧I■M b ・•/■・Veto r»vw« •・Y «•傀•*,■<10, T ■ ■・w3 «ab» M ■ «MB» M «1 MMMM a««Ma4 ■ ■ d 0 H(”・"T*<■・•《mrWx・w^p.・i •厂• Z,•■・・,・筑—>t* Vf«MbC:Maftit ■ iwa 12»。
第五章现代优化计算方法§5.1 引言 §5.2 计算复杂性和启发式算法的概念 §5.3 模拟退火优化算法 §5.4 遗传优化算法 §5.5 神经网络优化算法 §5.6 混合优化算法§5.1常规优化算法 Powell法、梯度法引言随机方向搜索法、复合形法、惩罚函数法 启发式算法 适于求解高非线性、多约束、多极值问题现代优化算法:模拟退火算法(Simulated annealing) 遗传算法(Genetic algorithms) 神经网络优化算法(Neural networks optimization) 混合优化算法(Hybrid optimization)§5.2 计算复杂性和启发式算法一.计算复杂性 由于计算时间和存储空间的局限,某些算法在实践中不一 定能得到解 算法的复杂性 算法的求解方法造成(例:求二阶导数) 问题的复杂性 问题本身求解的复杂造成求解问题的规模(维数)n 对复杂性的影响二.启发式算法 是相对于有严格数学背景的数学规划优化算法提出的。
有严格数学背景——梯度法、坐标轮换法、Powell法 是基于直观或经验构造的算法,在可接受的花费(指 计算时间和空间)内寻找最好的解,但不能保证所得 的解就是最优解,以及此解与最优解的近似程度。
通过揭示和模拟自然现象和过程,并综合数学、物理 学、生物进化、人工智能、神经科学和统计学等所构 造的算法。
也称构造型算法、智能优化算法。
§5.3 模拟退火优化算法一. 物理背景: 固体退火的物理过程和统计性质: (1)加温:随温度升高,粒子能量增高,与平衡位置的距离 增大 (2)等温:温度升至熔解温度,固体的规则性被打破,成为 液体,粒子可以自由运动和重新排序,消除系统中原先存在的 非均匀状态 (3)冷却:随着温度的下降,粒子能量减弱,运动减小粒子 最终进入平衡态,固化为具有最小能量的晶体温度 t 下,分子停留在某一 状态 r 满足 Bolztmann 概率 分布:P E = E (r ) ={}1 ⎛ E (r ) ⎞ exp ⎜ − ⎟ z (t ) kt ⎠ ⎝其中: E(r) ——状态r的能量 k ——常数 E ——分子能量的一个随机变量 z(t) ——概率分布的标准化因子 D0 ——最低能量状态的个数 D ——状态空间中状态的个数 物理退火 E(r) E(rmin) 优化设计 f(x) f (x*)分子停留在某种能量状态的 概率与温度成反比随着温度 t 不断降低,分子停 留在低能量状态的概率不断增大 相同温度下,分子停留在低能量 状态的概率要更大二. 基本思想:状态 迁移准则( Metropolis 抽样稳定性条件):⎛ Ei − E j exp ⎜ ⎝ kt ⎞ ⎟ ≥ random ( 0,1) ⎠若新状态 j 的能量满足条件,则被用来替代原状态 i。