电动助力转向系统开发简介
- 格式:docx
- 大小:1.63 MB
- 文档页数:11
第1章绪论1.1电动助力转向系统概述随着科学技术的飞速发展,汽车各方面的性能都有了很大的发展,但同时人们对汽车的性能也有了更高的要求。
为了取得更好的汽车性能,充分利用机械和电子两方面的优势,提供机电一体化的解决方案,日益被业界人士推崇为有效的应对策略。
虽然汽车是机械技术的完美再现,但是由于机械技术在短期内不会再有很大的突破,而电子技术正越来越体现出其相对而言更优越的地方,所以研制机、电相结合的汽车相关部件正成为当前的主要趋势。
转向系统作为汽车的一个重要组成部分,也同样顺应这样的发展趋势。
就目前而言,应当说也已经找到了比较完美的解决方案。
汽车助力转向系统是用于改变或保持汽车行驶方向的专门机构。
其作用是使汽车在行驶过程中能够按照驾驶员的意图,适时地改变其行驶方向,能与行驶系统配合共同保持汽车持续稳定地行驶。
汽车方向盘助力系统经历了从机械助力到液压助力(hydraulic Power steering HPS)再到电子液压助力系统(electric hydraulic power steering EHPS)这三个阶段的演变。
经过多年的探索,电动助力转向(Electric Power Steering ,简称EPS)作为一种全新的动力转向模式走入了业界的视野,并且很快成为动力转向系统研究与开发的的热点。
由于电动助力转向系统相对于液压动力转向系统有着诸多的优点,因此电动助力转向系统及其相关配套的部件的研究与开发正愈来愈备受各主要汽车生产企业的青睐。
电动助力转向系统(EPS,Electric Power Steering)是未来转向系统的发展方向。
该系统由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。
另外,电动助力转向系统还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点。
正是因为由于有了这些优点,电动助力转向系统作为一种新的转向技术,部分取代了液压动力转向系统(Hydraulic Power Steering,简称HPS)。
浅析汽车电动助力转向系统开发与验证摘要:随着我国科技的发展,汽车电动助力转向系统也得到了发展,汽车底盘正由传统底盘向线控底盘过渡。
为了追求更高的执行精度、更快的响应速度及更好的安全性,智能驾驶汽车要求底盘系统能够尽可能取消执行机构间的机械连接,用电信号来传递指令。
其中,线控转向是线控底盘中控制横向运动的核心部件,是汽车高阶智能驾驶的重要执行机构。
关键词:引言乘用车转向系统的发展历经纯机械转向系统—液压助力转向系统—电动助力转向系统3个阶段,目前已全面进入电动助力时代。
根据助力形式的不同,电动助力转向系统可分为转向轴助力式、单齿轮助力式、双齿轮助力式、带传动单齿条助力式4种。
选择助力形式的一个关键因素是最大齿条力等力学特性参数,因此转向系统的力学特性分析对电机选型至关重要。
目前对于转向系统的研究大都聚焦于转向控制的策略,对于力学特性特别是齿条力的实车测试方面的分析还比较少。
1汽车电动助力转向系统特征分析1.1耗能量低汽车电动助力转向系统相较于传统汽车转向系统而言,具有耗能量低的特征。
具体而言,传统液压动力转向系统需通过电动机带动液压油流动而产生转向动力,液压油等资源浪费严重,转向能量消耗量大。
而汽车电动助力转向系统则可更好地控制能量输出,在汽车转向时进行能量的输出,实际能耗量低,大大提升了汽车与运行期间的经济效益及安全效益。
1.2转向跟随力强汽车电动助力转向系统的转向跟随力更强,在系统实际运行过程中,电动机与其他结构直接相连,使车轮转向期间前后摆振率降低,切实提高了汽车专项时的效率,对驾驶员的人身安全提供了重要保障。
不仅如此,对传统液压转向系统相比,汽车电动助力转向系统中迟滞效应小,抗扰能力强。
1.3稳定性高汽车电动助力转向系统具有稳定性高的特征。
以汽车高速运行转向情况为判断汽车稳定性的重要依据,采用汽车电动助力转向系统可帮助汽车在方高速行驶期间迅速回正,通过计算机网络系统的全程控制,确保汽车转向期间的安全性,提高驾驶员驾驶体验。
![汽车电动助力转向系统[1]](https://uimg.taocdn.com/6f46b25258eef8c75fbfc77da26925c52cc59125.webp)
汽车电动助力转向系统1. 概述汽车电动助力转向系统是现代汽车中的一项重要技术,它能够提供更轻松、更精确的转向控制,为驾驶员提供更好的驾驶体验。
本文将介绍汽车电动助力转向系统的工作原理、优势和在汽车行业中的应用。
2. 工作原理汽车电动助力转向系统主要由三个局部组成:电动助力转向助力器、转向传感器和转向控制单元。
2.1 电动助力转向助力器电动助力转向助力器是电动助力转向系统的核心部件,它通过感知驾驶员的转向意图并提供适当的助力来辅助驾驶员转向。
同时,电动助力转向助力器还能通过调节助力的力度来提高转向的精确度和稳定性。
2.2 转向传感器转向传感器用于感知车辆的转向角度和速度,并将转向信号传递给转向控制单元。
转向传感器的准确性和灵敏度对于电动助力转向系统的正常运行至关重要。
2.3 转向控制单元转向控制单元接收来自转向传感器的转向信号,并根据驾驶员的意图和当前道路状况来调节电动助力转向助力器的工作。
转向控制单元使用复杂的算法来实现转向力的精确控制,以提供最正确的驾驶体验。
3. 优势相比传统的液压助力转向系统,汽车电动助力转向系统具有以下优势:•节能环保:电动助力转向系统无需液压泵和液压系统,减少能源消耗和液压油污染。
•精确稳定:电动助力转向系统能够根据驾驶员的意图和道路状况提供精确的转向力,提高驾驶稳定性。
•可调节性强:电动助力转向系统可以通过调节助力的力度来适应不同驾驶条件和驾驶者的需求。
•故障自诊断:电动助力转向系统具有故障自诊断功能,能够及时发现和报告故障,提高驾驶平安性。
4. 应用汽车电动助力转向系统已经在现代汽车中得到广泛应用,并逐渐取代了传统的液压助力转向系统。
它不仅在高档轿车上得到应用,也在中低档车型中得到普及。
除了提供驾驶员更好的驾驶体验外,汽车电动助力转向系统还为自动驾驶技术的开展提供了根底。
与其他汽车电子系统相结合,电动助力转向系统能够实现更高级的自动驾驶功能,为未来智能交通做出奉献。
汽车电动助力转向系统引言汽车电动助力转向系统是一种先进的技术,旨在提供更轻松的驾驶体验和更高的驾驶安全性。
本文将对汽车电动助力转向系统进行综合介绍,包括其原理、功能、优势以及发展前景。
1. 原理汽车电动助力转向系统通过电动机的力量来辅助转向操作。
传统的液压助力转向系统将液体通过泵送到助力转向器以增加转向轮的转向力量,而电动助力转向系统则通过电动机转动转向轮来达到同样的效果。
2. 功能汽车电动助力转向系统具有多种功能,以下是其主要功能:2.1 转向助力最基本的功能是提供转向助力,通过电动助力转向系统,驾驶员无需用力过多就能完成转向动作。
这使得操控汽车更加轻松和灵活,特别是在低速行驶和停车时。
2.2 主动回正电动助力转向系统还具有主动回正功能,即在转向操作完成后,系统会自动将方向盘调整到中性位置。
这种功能提高了汽车的稳定性和驾驶安全性。
2.3 转向感知电动助力转向系统能够感知驾驶员的转向意图,并根据驾驶环境和车辆状态进行相应的调整。
例如,当驾驶员在高速公路上进行快速转向时,系统可以提供更多的助力,以增加操控的稳定性。
3. 优势相比传统的液压助力转向系统,汽车电动助力转向系统具有以下优势:3.1 能量效率电动助力转向系统采用电动机作为动力来源,相比液压系统的泵,其能量损失更小,能够提供更高的能量效率和更低的油耗。
3.2 精确性和可调性由于电动助力转向系统采用电子控制,具有更高的精确性和可调性。
驾驶员可以根据个人喜好和驾驶条件对助力的大小进行调整。
3.3 故障检测和自诊断功能电动助力转向系统具有自动故障检测和自诊断功能。
当系统出现问题时,它能够及时发出警告并提供相应的故障代码,方便修复和维护。
4. 发展前景随着汽车科技的不断发展,汽车电动助力转向系统将会越来越普及。
它能够提高驾驶安全性,减少驾驶负担,提升驾驶体验,是未来汽车发展的趋势。
结论汽车电动助力转向系统是一项重要的汽车技术创新。
它通过电动助力的方式提供更加轻松和精确的驾驶操控体验,并具有更高的能量效率和可调性。
汽车电动助力转向系统开发项目简要说明一、项目概要及背景研制开发汽车电动助力转向系统(简称EPS)。
产品包括转向柱式、齿轮齿条式、小齿轮式三大系列,产品技术水平达到国际先进。
项目从xx年10月开始,计划xx年5月完成。
xx年开始批量生产,达产后年产汽车电动助力转向系统30万套。
汽车电动转向系统是一种新型助力转向装置,它用电机提供助力,助力大小由电控单元(ECU)控制。
它用于汽车转向系统上,可以使汽车转向操作轻便、灵活、可靠,从而获得最佳动力控制,改善转向系统性能,提高安全性;它能节约燃料,有利于环保,是现代汽车发展的高新技术,也是轿车动力转向技术未来发展方向。
国外EPS的研究已经有20多年历史,近年来随着电子技术的发展,EPS成为发展最快的高科技汽车零部件产品之一。
目前日本、欧洲已迅速推广,预测2010年后,顶级轿车将全部安装EPS,全世界30%新开发车型将安装电动助力转向系统。
For personal use only in study and research; not for commercial use目前我国EPS研发处于起步阶段,产品技术处于国外20世纪90年代中期水平,技术落后,软硬件依赖进口,只有少数厂家可以进行以组装为主的EPS 生产。
国内汽车厂商配套主要依赖于进口。
随着汽车工业的发展,我国到2010年汽车产销量将达到1000万辆以上,可以安装EPS的轿车、微型面包车、轻型客车、轻型货车年产量超过400万辆。
我国汽车转向行业“十一.五”专题发展规划,到2010年电动助力转向装置需求量约为100万套。
汽车电动助力转向系统已列入《中国汽车零部件“十一五”专项发展规划》重点发展的产品。
本项目研发的EPS适用于国内大多数中小排量乘用车。
For personal use only in study and research; not for commercial use二、研制开发的目的和意义目前国内1.6升以下乘用车的转向系统主要是机械转向。
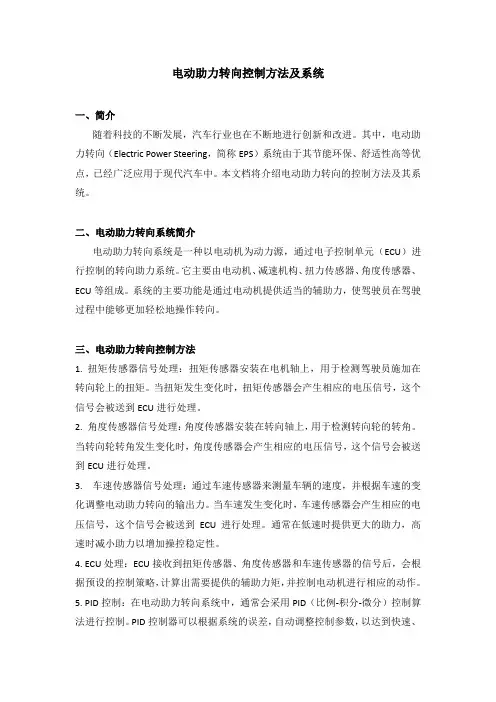
电动助力转向控制方法及系统一、简介随着科技的不断发展,汽车行业也在不断地进行创新和改进。
其中,电动助力转向(Electric Power Steering,简称EPS)系统由于其节能环保、舒适性高等优点,已经广泛应用于现代汽车中。
本文档将介绍电动助力转向的控制方法及其系统。
二、电动助力转向系统简介电动助力转向系统是一种以电动机为动力源,通过电子控制单元(ECU)进行控制的转向助力系统。
它主要由电动机、减速机构、扭力传感器、角度传感器、ECU等组成。
系统的主要功能是通过电动机提供适当的辅助力,使驾驶员在驾驶过程中能够更加轻松地操作转向。
三、电动助力转向控制方法1. 扭矩传感器信号处理:扭矩传感器安装在电机轴上,用于检测驾驶员施加在转向轮上的扭矩。
当扭矩发生变化时,扭矩传感器会产生相应的电压信号,这个信号会被送到ECU进行处理。
2. 角度传感器信号处理:角度传感器安装在转向轴上,用于检测转向轮的转角。
当转向轮转角发生变化时,角度传感器会产生相应的电压信号,这个信号会被送到ECU进行处理。
3. 车速传感器信号处理:通过车速传感器来测量车辆的速度,并根据车速的变化调整电动助力转向的输出力。
当车速发生变化时,车速传感器会产生相应的电压信号,这个信号会被送到ECU进行处理。
通常在低速时提供更大的助力,高速时减小助力以增加操控稳定性。
4. ECU处理:ECU接收到扭矩传感器、角度传感器和车速传感器的信号后,会根据预设的控制策略,计算出需要提供的辅助力矩,并控制电动机进行相应的动作。
5. PID控制:在电动助力转向系统中,通常会采用PID(比例-积分-微分)控制算法进行控制。
PID控制器可以根据系统的误差,自动调整控制参数,以达到快速、准确的目的。
四、电动助力转向系统的组成1.电动助力转向电机:负责提供辅助转向力,通常与转向柱相连并安装在转向齿轮或转向柱上。
2.控制单元(ECU):接收传感器的输入信号,并根据预设的算法和逻辑,控制电动助力转向电机的输出力。
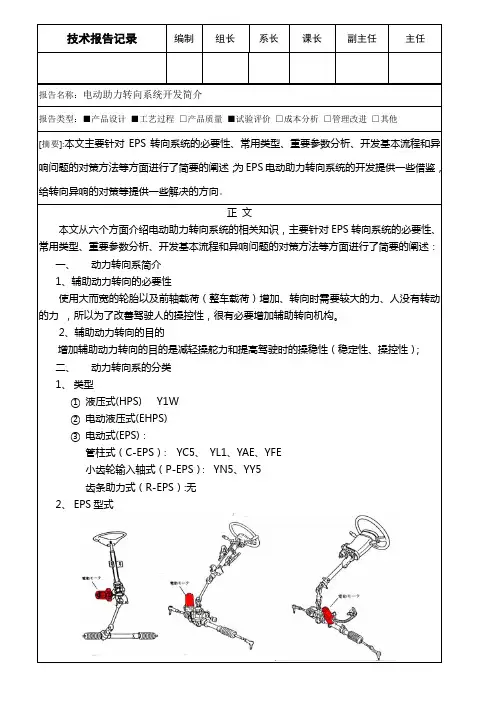
正文本文从六个方面介绍电动助力转向系统的相关知识,主要针对EPS转向系统的必要性、常用类型、重要参数分析、开发基本流程和异响问题的对策方法等方面进行了简要的阐述:一、动力转向系简介1、辅助动力转向的必要性使用大而宽的轮胎以及前轴载荷(整车载荷)增加、转向时需要较大的力、人没有转动的力,所以为了改善驾驶人的操控性,很有必要增加辅助转向机构。
2、辅助动力转向的目的增加辅助动力转向的目的是减轻操舵力和提高驾驶时的操稳性(稳定性、操控性);二、动力转向系的分类1、类型①液压式(HPS) Y1W②电动液压式(EHPS)③电动式(EPS):管柱式(C-EPS): YC5、YL1、YAE、YFE小齿轮输入轴式(P-EPS):YN5、YY5齿条助力式(R-EPS):无2、EPS型式管柱辅助小齿轮辅助齿条辅助三、动力转向系关重分析1、EPS系统简图2、扭矩传感器扭矩传感器是通过扭力杆扭转后使两个分相器单元产生一个相对角度。
3、控制器逻辑(ECU)驾驶员操作方向盘时,连接方向盘的扭杆产生形变,其形变角度与方向盘的转矩成正比,转矩传感器将扭杆形变的角度转化为线性的电压输出信号T,并与车速信号V,发动机转速信号W,点火信号G送入到控制器ECU进行综合、分析、判断和运算后,输出电流信号控制助力电机。
助力电机通过传动机构产生助力转矩,该助力扭矩施加到转向轴上,从而辅助驾驶员完成转向操作。
4.2 磨损补偿涡轮蜗杆传动而产生的磨损间隙可以通过下面的方式进行补偿:四、EPS开发流程(转向柱、转向器)1、开发过程开发初期主要确认的参数有:整车质量,前轴载荷,轮胎规格,转向轮转角,最小转弯半径,轴距和轮距等;基本流程如下:2、设计输入转向柱的设计输入主要包括:电机类型、蓄电池电压、额定电流、倾角调节功能及角度、溃缩行程、管柱长度、安装尺寸、减速比、方向盘接口尺寸、点火开关锁口等参数;转向器的设计输入主要包括:齿条最大推力、内外球头中心距、齿条行程、线传动比、齿条直径和安装尺寸等参数。
电动助力转向系统开发简介公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]正文本文从六个方面介绍电动助力转向系统的相关知识,主要针对EPS转向系统的必要性、常用类型、重要参数分析、开发基本流程和异响问题的对策方法等方面进行了简要的阐述:一、动力转向系简介1、辅助动力转向的必要性使用大而宽的轮胎以及前轴载荷(整车载荷)增加、转向时需要较大的力、人没有转动的力,所以为了改善驾驶人的操控性,很有必要增加辅助转向机构。
2、辅助动力转向的目的增加辅助动力转向的目的是减轻操舵力和提高驾驶时的操稳性(稳定性、操控性);二、动力转向系的分类1、类型①液压式(HPS) Y1W②电动液压式(EHPS)③电动式(EPS):管柱式(C-EPS): YC5、 YL1、YAE、YFE小齿轮输入轴式(P-EPS): YN5、YY5齿条助力式(R-EPS):无2、EPS型式管柱辅助小齿轮辅助齿条辅助三、动力转向系关重分析1、EPS系统简图2、扭矩传感器扭矩传感器是通过扭力杆扭转后使两个分相器单元产生一个相对角度。
3、 控制器逻辑(ECU )驾驶员操作方向盘时,连接方向盘的扭杆产生形变,其形变角度与方向盘的转矩成正比,转矩传感器将扭杆形变的角度转化为线性的电压输出信号T ,并与车速信号V ,发动机转速信号W ,点火信号G 送入到控制器ECU 进行综合、分析、判断和运算后,输出电流信号控制助力电机。
助力电机通过传动机构产生助力转矩,该助力扭矩施加到转向轴上,从而辅助驾驶员完成转向操作。
ECU 控制策略主要包括: 助力控制、回正控制和阻尼控制。
项目 功 能基本控制 根据转向力矩值及车速大小计算得到所需输出电流控制马达运转 惯性补偿控制当驾驶员开始操作方向盘时改善马达的启动效果(启动力矩)电机反馈电流目标电流车速增大MCU控制软件模块转向轴助力控制算法电机减速器总成转矩传感器车速传感器点火信号发动机转速TV W GI转向复位控制当方向盘从极限位置向回转动时,EPS提供复位助力控制衰减控制当车辆高速过弯时调节助力输出,以防止车身出现较大摇摆增压控制对EPS ECU的电压进行增压,当驾驶员未对方向盘进行任何操作时或车辆保持直线行驶时该电压保持在0伏。
电子行业汽车电子助力转向系统概述在现代汽车中,转向系统是一个至关重要的组成部分。
它旨在帮助驾驶员控制和导向车辆。
随着电子技术的快速发展,汽车电子助力转向系统逐渐取代了传统的机械助力转向系统,提供更高效、更安全的转向辅助。
本文将介绍电子行业汽车电子助力转向系统的工作原理、特点、应用以及未来趋势。
工作原理电子助力转向系统通过电子控制单元(ECU)和各种传感器来实现对车辆转向的辅助。
ECU会接收来自传感器的信息,包括车速、转向角度、转向助力需求等,然后根据这些信息控制转向助力装置以提供合适的转向助力。
常见的电子助力转向系统包括电子助力转向器(EPS)、电动助力转向器(EPAS)和电动液压助力转向器(EHPS)。
EPS系统使用电动马达来代替传统的液压助力泵,并通过ECU来对马达进行控制。
EPAS系统则将电动助力转向装置集成到转向柱上,通过电控单元来控制助力的大小和方向。
EHPS系统则是将传统的液压助力泵用电动泵取代,并通过ECU来进行控制。
特点和优势与传统的机械助力转向系统相比,电子助力转向系统具有以下特点和优势:1.更高的准确性和响应性:电子助力转向系统能够更准确地感知驾驶员的转向意图,并提供相应的助力。
与传统系统相比,它能够更快地响应驾驶员的操纵,提供更精确的转向。
2.可变助力调节:电子助力转向系统能够根据驾驶条件和驾驶员的需求进行助力调节。
在高速行驶时,系统可以提供较少的助力,以保持稳定性;在低速行驶时,系统可以提供更多的助力,减轻驾驶员的负担。
3.更高的安全性:电子助力转向系统能够根据车速和转向角度进行动态调整,提供更稳定的转向辅助。
它可以在恶劣道路或紧急情况下提供额外的助力,提高驾驶员的安全性。
4.节能环保:与传统的液压助力转向系统相比,电子助力转向系统无需使用液压油,减少了能源消耗和环境污染。
5.可靠性和耐久性:电子助力转向系统无机械部件,减少了维护和故障的可能性。
它的结构简单,寿命更长,可靠性更高。
电动助力转向系统1、功能原理汽车电动助力转向(EPS)系统是在机械式转向系统的基础上加装电动机驱动单元构成的。
其主要的是提供助力、改善汽车转向性能、协助驾驶员完成转向操作。
2、组成具体组成原理详细EPS系统由扭矩传感器、车速传感器、电自控制单元(ECU)、助力电动机及减速机构等。
○1扭矩传感器,又称转向传感器,其作用是测定方向盘与转向器之间的相对扭矩,并转化为电信号传递给ECU。
○电动机,其功能是根据ECU的相关指令,输出适宜的转向助力矩,是EPS系统的动力源。
○减速机构,接收电动机的转矩,经减速增矩后传递给转向轴、小齿轮或齿条。
○ECU,是EPS系统的控制中心,根据扭矩传感器和车速传感器的信号进行逻辑分析与计算并发出指令,控制电动机和离合器。
3、基本工作过程汽车转向时,扭矩传感器和车速传感器将检测到的扭矩、方向信号及车速信号传递给ECU,ECU根据扭矩传感器的信号和车速传感器的信号确定电动机扭矩的大小和方向,电动机再通过离合器、减速机构等把此扭矩传递给扭杆,最终起到为驾驶员提供转向助力的效果,使汽车转向更轻便。
车速越低转向助力越大,车速越高转向助力越小。
当车速大于一定值时,取消助力,将直流电动机反接制动,目的是在汽车高速行驶时增加操作方向盘的手感,保证行驶安全。
4、EPS系统的控制方式○助力控制:助力控制是EPS的基本控制模式,包括汽车原地转向助力控制和动态转向助力控制两个方面。
○回正控制:回正控制的目的是使方向盘能够更快、更准地回到中位,避免方向盘产生不必要的抖动。
○阻尼控制:阻尼控制是为了提高汽车高速行驶时的转向稳定性的一种控制模式。
5、EPS的优点○降低了燃油消耗液压动力转向系统需要发动机带动液压油泵,使液压油不停地流动,浪费了部分能量。
相反电动助力转向系统(EPS)仅在需要转向操作时才需要电机提供的能量,该能量可以来自蓄电池,也可来自发动机。
○增强了转向跟随性在电动助力转向系统中,电动助力机与助力机构直接相连可以使其能量直接用于车轮的转向。
电动助力转向系统研发生产方案一、实施背景随着全球汽车工业的快速发展,消费者对汽车性能和安全性的需求日益增长。
作为汽车关键零部件之一,转向系统在提高驾驶体验和确保行车安全方面具有举足轻重的作用。
传统液压转向系统由于其能耗高、效率低等问题,已无法满足现代汽车业的发展需求。
为了应对这一挑战,我们提出了电动助力转向系统的研发生产方案。
二、工作原理电动助力转向系统(EPS)主要利用电机和减速机构为方向盘提供助力,从而提高转向的轻便性和准确性。
其核心部件包括电机、扭矩传感器、控制器和减速机构。
电机通过扭矩传感器感知驾驶员输入的扭矩,控制器根据采集的信号计算出合适的助力大小,然后驱动电机转动,通过减速机构将助力传递到方向盘。
三、实施计划步骤1.开展市场调研,分析电动助力转向系统的需求及竞争态势。
2.进行技术可行性研究,包括电机、扭矩传感器、控制器和减速机构的设计与选型。
3.搭建系统试验平台,进行性能测试与验证。
4.与汽车制造商合作,将电动助力转向系统集成到汽车中,进行实车测试。
5.根据测试结果进行优化改进,确保系统的性能和质量。
6.正式投产并推向市场。
四、适用范围本研发生产方案适用于各类乘用车、商用车以及特种车辆的转向系统升级或替换。
特别是对于那些追求高性能、高安全性和低能耗的汽车制造商和消费者,电动助力转向系统具有较大的市场潜力。
五、创新要点1.采用先进的电机技术和控制算法,提高系统的能效比。
2.设计简洁、紧凑的减速机构,降低系统成本并提高可靠性。
3.整合多种安全功能,如车道偏离预警、自动泊车等,提升驾驶安全性。
4.提供个性化设置选项,满足不同驾驶员的需求。
六、预期效果1.提高转向系统的助力效果,使驾驶更加轻松省力。
2.降低车辆能耗,实现节能减排。
3.提高车辆的安全性能,减少交通事故风险。
4.为汽车制造商提供新的盈利点,提高市场竞争力。
七、达到收益根据市场调查和分析,预计电动助力转向系统的市场需求将逐年增长。
电控助力转向系统的原理电控助力转向系统是一种通过电子控制单元(ECU)控制的汽车转向系统。
它利用电动机在驾驶员操纵转向盘时提供额外的助力,帮助驾驶员更轻松地转向车辆。
本文将详细介绍电控助力转向系统的原理和工作方式。
一、电控助力转向系统的原理电控助力转向系统由电动助力转向机构、传感器和控制单元组成。
其中,电动助力转向机构是系统的核心部件,它通过电机和齿轮装置实现助力转向。
传感器用于感知驾驶员的转向意图,并将信号传输给控制单元。
控制单元根据传感器信号,控制电动助力转向机构提供适当的助力。
二、电控助力转向系统的工作方式1. 感知转向意图电控助力转向系统通过安装在转向柱上的转向传感器感知驾驶员的转向意图。
转向传感器可以感知转向盘的转动角度和转速,并将这些信息传输给控制单元。
控制单元根据转向传感器的信号判断驾驶员的转向意图。
2. 提供助力根据驾驶员的转向意图,控制单元计算出相应的助力需求,并向电动助力转向机构发送指令。
电动助力转向机构根据控制单元的指令,通过电机和齿轮装置提供额外的助力。
助力的大小根据转向盘的转动力度和速度来调节,以满足驾驶员的需求。
3. 实时调整电控助力转向系统能够实时调整助力的大小,以适应不同驾驶条件和车辆状态。
例如,在低速行驶时,系统可以提供更大的助力,以增加转向的灵活性和舒适性。
而在高速行驶时,系统可以减小助力,以提高转向的稳定性和操控性。
三、电控助力转向系统的优势1. 提高操控性能电控助力转向系统可以根据驾驶员的转向意图提供适当的助力,使驾驶员更轻松地操控车辆。
尤其是在低速行驶和停车时,系统的助力能够显著减小驾驶员的转向力度,提高操控的精确性和灵活性。
2. 提升驾驶舒适性电控助力转向系统的助力能够根据驾驶员的需求进行实时调整,使转向更加轻盈和平稳。
驾驶员在长时间驾驶或疲劳驾驶时,能够减少对肌肉的负担,提高驾驶的舒适性和乘坐的舒适性。
3. 增加安全性电控助力转向系统能够根据驾驶员的转向意图提供适当的助力,并且具有实时调整能力。
电动助力转向系统的开发研究电动助力转向系统(Electric power steering,简称EPS)是世界汽车电子控制技术发展的研究热点和前沿技术之一。
国外汽车电动助力转向已部分取代传统液压动力转向(Hydraulic power steering,简称HPS)。
目前国内清华大学、合肥工业大学等高校正从事该方面的研究,并取得了阶段性的成果,争取进一步改进与完善,早日实现商品化。
EPS 通过对控制器软件的设计,十分方便地调节系统的助力特性,使汽车能在不同车速下获得不同的助力特性,以满足不同的驾驶情况的需求。
同时,EPS 用电动机直接提供助力,它能节约燃料,提高主动安全性,有利于环保。
1、助力转向系统的类型及EPS的基本控制策略1.1 助力转向系统的类型(1)传统液压动力转向液压动力转向的控制阀采用滑阀式,即控制阀中的阀以轴向移动来控制油路。
这种滑阀式控制结构简单,生产工艺性好,操纵方便,宜于布置,使用性能较好。
但是滑阀式控制阀灵敏度不够高,后来逐渐被转阀代替。
(2)电控液压动力转向电控液压动力转向系统的种类很多,但其原理基本上都是通过在油泵或转向器上加装电子执行机构或辅助装置,根据车速信号来控制液压系统的流量或压力。
表1 电控液压动力转向系统的种类(3)电动助力转向系统(EPS)的工作原理图1 EPS的控制系统示意图1—车轮2—拉杆3—齿条4—小齿轮5—离合器6—动力开关7—输出轴8—扭杆9—转矩传感器10—输入轴11—方向盘12—转矩信号13—电机14—电流控制15—控制单元16—车速信号电动助力转向系统的基本组成包括:扭矩传感器、车速传感器、控制元件、电动机和减速机构等。
图1 所示为配用齿轮齿条式转向器的EPS。
信号控制器根据各传感器的输入信号确定助力扭矩的幅值和方向,并且直接控制电机。
电机的输出扭矩由减速齿轮放大,并通过万向节、转向器中的传送装置把输出扭矩送到齿条,使之向转向轮提供助推扭矩。
eps助力转向开发流程英文回答:1. Concept and Design:Define the functional requirements for the EPS (Electric Power Steering) system, such as steering effort, response, and stability.Determine the system architecture, including the EPS motor, control unit, and sensors.Select appropriate components and materials based on performance, reliability, and cost considerations.2. Simulation and Modeling:Develop computer models to simulate the EPS system's behavior under various driving conditions.Use simulation results to optimize the control algorithms and system parameters.Conduct virtual testing to evaluate the system's performance and identify potential issues.3. Prototyping and Testing:Build prototypes of the EPS system to evaluate its physical and functional characteristics.Conduct bench tests to assess the motor's torque and efficiency.Perform road tests to evaluate the system's steering feel, stability, and safety.4. Control Algorithm Development:Design and implement control algorithms that regulate the EPS motor based on steering input, vehicle dynamics, and sensor feedback.Optimize the control algorithms to achieve desired steering behavior, such as low effort at low speeds and precise response at high speeds.Calibrate the control parameters to ensure optimal performance across a wide range of operating conditions.5. Integration and Validation:Integrate the EPS system into the vehicle's steering system, including the steering wheel, steering column, and sensors.Conduct system-level testing to ensure proper functionality and compatibility with other vehicle systems.Obtain regulatory approvals and certifications as required.6. Production and Deployment:Manufacture the EPS system components and assemble the final product.Establish quality control measures to ensure consistent performance and reliability.Implement a production process that meets time, cost, and quality targets.7. Maintenance and Support:Provide technical documentation and training materials for maintenance and repair.Establish a support network to address any issues or concerns that may arise during the system's lifetime.Monitor field performance data to identify potential areas for improvement and upgrades.中文回答:1. 概念和设计:定义 EPS(电动助力转向)系统的功能需求,例如转向力、响应性和稳定性。
汽车电动助力转向系统的设计概述汽车电动助力转向系统是一种电子辅助转向系统,为驾驶员提供操纵方向盘的力量辅助,以改善驾驶操控性和舒适性。
该系统通过电动助力装置来替代传统的液压助力转向系统,具有更高的效率和响应性。
本文将详细介绍汽车电动助力转向系统的设计原理和关键技术。
设计原理汽车电动助力转向系统的设计基于电动助力装置和转向控制单元的协同工作。
电动助力装置负责提供对转向系统的力量辅助,转向控制单元那么负责监测车辆的转向情况并根据驾驶员的输入进行控制。
电动助力装置电动助力装置由电机、减速器、传感器和控制单元组成。
电机负责提供动力,减速器那么用于降低电机的转速并增加转力。
传感器用于监测转向力和转向角度,并向控制单元提供反应信息。
控制单元根据传感器的反应信号来确定输出力的大小和方向。
转向控制单元转向控制单元由微处理器和控制算法组成。
微处理器负责处理传感器的数据和执行控制算法。
控制算法根据驾驶员的转向输入,计算出相应的助力输出指令,并通过电动助力装置将助力传递给转向系统。
关键技术功率电子技术汽车电动助力转向系统需要提供足够的力量辅助,因此需要采用功率电子技术来实现高效能的能量转换和控制。
功率电子技术包括电机驱动技术、功率开关技术和电源管理技术,它们的协同工作可以有效提高电动助力转向系统的效率和可靠性。
传感器技术传感器技术在汽车电动助力转向系统中起到了至关重要的作用。
传感器可以实时监测转向力和转向角度,从而提供准确的反应信息给控制单元。
常用的传感器包括转向力传感器和转向角度传感器,它们需要具有高精度和可靠性,以确保系统的准确性和稳定性。
控制算法控制算法是汽车电动助力转向系统的核心局部,它决定了系统的性能和操控性。
控制算法根据传感器的反应信息和驾驶员的转向输入,计算出相应的助力输出指令。
常用的控制算法包括比例-积分-微分〔PID〕控制算法和模糊控制算法,它们能够确保系统的稳定性和响应性。
设计考虑功率和效率汽车电动助力转向系统需要提供足够的助力,同时也要确保系统的功率和效率。
简述电动助力转向系统的工作原理
电动助力转向系统是一种可以通过电动助力提供转向力的转向系统。
它的主要工作原理如下:
1. 传感器感知:系统中的传感器可以实时感知车辆的转向角度、转向力等数据。
这些传感器可以是角位传感器、转向力传感器等。
2. 数据处理:系统中的控制器接收传感器传来的数据,并进行数据处理和分析。
控制器会根据传感器数据,判断车辆转向的需求,以及转向力的大小。
3. 电机输出:控制器会通过电脑芯片或者其它方式控制电动助力转向系统中的电机。
电机的输出转矩大小会根据传感器数据和控制器的判断进行调整。
4. 助力输出:电机的输出转矩会通过链条、齿轮等装置,最终传递给转向系统。
这样车辆驾驶员在转动驾驶盘时,会感受到来自电动助力转向系统的辅助力。
总体来说,电动助力转向系统的工作原理就是通过感知车辆的转向需求,判断需要的转向力大小,并通过电机输出相应的转矩,提供转向助力,使驾驶员可以更轻松地进行转向操作。
这种转向系统相比于传统的液压助力转向系统具有响应更快、能够进行更精准的力控制等优点。
正文
本文从六个方面介绍电动助力转向系统的相关知识,主要针对EPS转向系统的必要性、常用类型、重要参数分析、开发基本流程和异响问题的对策方法等方面进行了简要的阐述:
一、动力转向系简介
1、辅助动力转向的必要性
使用大而宽的轮胎以及前轴载荷(整车载荷)增加、转向时需要较大的力、人没有转动的力,所以为了改善驾驶人的操控性,很有必要增加辅助转向机构。
2、辅助动力转向的目的
增加辅助动力转向的目的是减轻操舵力和提高驾驶时的操稳性(稳定性、操控性);
二、动力转向系的分类
1、类型
①液压式(HPS) Y1W
②电动液压式(EHPS)
③电动式(EPS):
管柱式(C-EPS): YC5、YL1、YAE、YFE
小齿轮输入轴式(P-EPS):YN5、YY5
齿条助力式(R-EPS):无
2、EPS型式
管柱辅助小齿轮辅助齿条辅助
三、动力转向系关重分析
1、EPS系统简图
2、扭矩传感器
扭矩传感器是通过扭力杆扭转后使两个分相器单元产生一个相对角度。
3、控制器逻辑(ECU)
驾驶员操作方向盘时,连接方向盘的扭杆产生形变,其形变角度与方向盘的转矩成正比,转矩传感器将扭杆形变的角度转化为线性的电压输出信号T,并与车速信号V,发动机转速信号W,点火信号G送入到控制器ECU进行综合、分析、判断和运算后,输出电流信号控制助力电机。
助力电机通过传动机构产生助力转矩,该助力扭矩施加到转向轴上,从而辅助驾驶员完成转向操作。
4.2 磨损补偿
涡轮蜗杆传动而产生的磨损间隙可以通过下面的方式进行补偿:
四、EPS开发流程(转向柱、转向器)
1、开发过程
开发初期主要确认的参数有:整车质量,前轴载荷,轮胎规格,转向轮转角,最小转弯半径,轴距和轮距等;基本流程如下:
2、设计输入
转向柱的设计输入主要包括:电机类型、蓄电池电压、额定电流、倾角调节功能及角度、溃缩行程、管柱长度、安装尺寸、减速比、方向盘接口尺寸、点火开关锁口等参数;
转向器的设计输入主要包括:齿条最大推力、内外球头中心距、齿条行程、线传动比、齿条直径和安装尺寸等参数。
3、空间布置
3.1 转向柱
转向系统的空间布置根据发动机、变速器的搭载位置,以及驾驶室内的设计布局图进行确定。
3.2 转向器
其空间位置需根据发动机、变速器、车轮中心以及转向节的安装硬点确定,并依据转向轮的转角大小,确定其转向梯形机构的几何参数。
4、类型选择
4.1 EPS转向系统的选择主要根据汽车类型、前轴载荷、轮胎规格和使用条件等决定,并要考虑其传动效率特性、角传动比变化特性等对使用条件的适应性,以及转向的其他性能、寿命、制造工艺等。
4.2 C-EPS转向柱结构型式是由转向柱机械结构+助力机构组成;国内电机技术的成熟,C-EPS是各汽车行业主要的选择方向。
4.3 转向器结构型式有多种,主要包括齿轮齿条式、循环球式、球面蜗杆滚轮式、蜗杆指销式等。
齿轮齿条式转向器其结构简单、紧凑,占用空间小,制造容易、传动效率高达90%、间隙可调整而被广泛采用。
5、关键要素
EPS系统关键的要素主要从硬件和软件两个方面,详述如下:
6、试验要求
正入力 逆入力
载荷 从小齿轮轴入力,计算齿条轴力
从车轮端入力,计算齿条轴力 静强度
正入力强度试验(QC G403) 转向连接座强度试验(QC 1402)
落锤冲击试验 (QC G405) 拉杆球头座强度试验 (QC
G406)
耐久强度 正转泥水试验(QC G404)
逆输入耐久试验(QC G407) 安装部耐久试验(QC 1406)
7、 强度校核
项目
内容(YL1) 1 方向盘入力 T h 5 N ·m 2 前轴满载 Ff 765 Kg
3 齿轮齿条传动比 k 50.91 mm/rev
4 涡轮蜗杆传动比 i 1:18.33 5
电机扭矩 T
2.9 N ·m
7.1 正入力
正向推力F2:
EPS 电机Fm :
由以上计算可知,齿条正向推力是:
F2=Fm (电机)+Fh (手入力)=5901.5+555.1=6456.6 N 7.2、逆入力(经验公式)
齿条逆向推力F1=Ff × g ×0.8=765×9.8×0.8=5997.6 N
结论: F2(6456.6N )>F1(5997.6),即正向推力大于逆向推力,满足转向驱动的性能要求。
8、 EPS 关重参数 8.1 前轴重
(手入力)
电机h )m (2F F F +=
前轴载荷越大,转向阻抗越大,所以需要的操舵力(齿条推力)和副辅助力也变得越大。
8.2转向操舵力(停车时)
设计基准是在中立附近为30N以下(操舵力矩5.0N・m,27N),现在的目标值是23~25N。
8.3 推算齿条推力
计算公式:GVW×913/(转向节臂长)(SMC经验值)
齿条与小齿轮轴的传动比由转向系的传动比决定,电机输出力、涡轮机构传动比由齿条推力、齿条与小齿轮轴的传动比决定。
8.4 齿轮速比
转向齿轮速比=方向盘回正角度÷轮胎转动角度
转向齿轮速比的值越小,操舵越轻便,但是,如果方向盘有少量的操作、轮胎也有大的移动,安
全性大大降低,所以需要有合理的速比值。
9、注意事项
9.1 转向追随性
电机性能决定了转矩和转速的关系;
当电机转速超过额定转速时,没有可靠的安全系数,
此时电机将成为负荷;所以,电机必须设计有富余的安全系数。
9.2 特性
为防止电机和ECU的过热,连续使用电机的时候,需控制电机的最大输出力(过载保护)当电机提供的辅助力减小,操舵时会变重。
五、
开发过程中的问题对策
1、 异音位置
转向柱和转向器主要的容易出现异响的部位如下:
2、异音及对策
①齿条&小齿轮轴的异音
主要包括不确定的低频音,以及坏路和比利时路容易发生(较大的逆向输入力)。
② 涡轮啮合部的异音
主要包括作KOTO 音和碎石路和比利石路容易发生(小的输入力)
0deg=25N
-150
-100-50050100
150-600-400-2000200400600
操舵角(deg)
操舵力(N )
1周期目2周期目3周期目4周期目5周期目6周期目
2、异音及对策
解决思路:从问题发生到对策完成的过程
①设计者要对评价阶段提出的异音要进行确认
②如果车辆上没有异音出现,更换部品进行确认
→确认现象对车辆是否有影响(是否为其他部品的声音)
③在异音发生的路面,测定拉杆的受力(频率、振幅)
④以测量值为参考,决定在供应商进行台架试验条件;实施再现测试。
⑤关于供应商制作的对策品,台架试验时确认对策效果。
⑥装上实车,在提出的路面上确认对策效果。
⑦落实图面上的台架试验项目。
六、总结
6.1、动力转向系统开发的思考
①EPS是汽车转向系统发展主要方向(线控转向)。
②EPS性能的检测在开发初期很重要;决定了周边的布置后很难再进行变更。
③试作时把部品的开发日程与供应商进行商谈。
④EPS开发的时候,问题最多的时候也是异音。
6.2、高性能动力转向系统的要求
①有可靠的轮胎信息向驾驶员传达②较低车速时的操舵力要轻
③高速时偏重④要有足够的刚性
⑤有线性感、摩擦感要减少⑥有辅助动力转向。