某款纯电动汽车电动助力转向系统设计开发
- 格式:docx
- 大小:511.38 KB
- 文档页数:7
汽车电动助力转向系统设计毕业论文本章主要介绍汽车电动助力转向系统设计的背景和意义,以及论文的目的和结构安排。
汽车转向系统是车辆控制的重要组成部分,它直接影响着驾驶员的操控感受和行车安全性。
随着科技的发展,传统的液压助力转向系统逐渐被电动助力转向系统所取代。
电动助力转向系统通过电力传动装置提供操控力,相较于液压助力转向系统具有更高的效率、更好的节能性和可靠性。
本文的目的是设计一种可靠、高效的汽车电动助力转向系统。
在研究的基础上,将重点关注系统的结构设计、控制算法优化、故障诊断等方面。
通过对系统的设计和优化,可以提高汽车的操控性和安全性。
本文结构安排如下:第二章将介绍汽车电动助力转向系统的背景与发展;第三章将详细阐述系统的设计原理与结构;第四章将重点探讨控制算法的优化与实现;第五章将研究系统的故障诊断方法与技术;最后,第六章将总结全文,并提出进一步研究的展望。
通过本文的研究和实践,相信可以为汽车电动助力转向系统的设计与优化提供一定的参考和借鉴,推动汽车技术的发展与进步。
在这一部分,我们将对汽车电动助力转向系统设计相关的文献进行综述。
我们将总结已有的研究成果,以及当前存在的问题。
具体内容}本文详细介绍了汽车电动助力转向系统设计的方法和步骤,涵盖了传感器选择、电机控制、系统优化等方面。
传感器选择在汽车电动助力转向系统设计中,选择合适的传感器是至关重要的。
传感器可以检测车轮的转向角度、转向速度以及转向力等参数,为后续的电机控制提供必要的数据支持。
常见的传感器包括转向角度传感器、转向速度传感器和转向力传感器。
在选择传感器时,需考虑其精度、响应速度和可靠性等因素,并确保其能与电机控制系统良好地配合。
电机控制在汽车电动助力转向系统中,电机控制是实现转向功能的核心部分。
电机控制系统通过接收传感器提供的数据,计算并控制电机的输出力矩,从而实现汽车的转向功能。
电机控制的关键是控制算法的设计和实现。
常见的电机控制方法有PID控制、模糊控制和神经网络控制等。
纯电动汽车电动助力转向系统机理研究与设计纯电动汽车电动助力转向系统机理研究与设计随着环保意识的增强和对汽车性能的要求不断提升,纯电动汽车(EV)已逐渐成为一种重要的替代能源汽车。
纯电动汽车相对于传统内燃机汽车在动力系统上的差异可不仅仅停留在功率来源上,还涉及到诸多部件、系统的变化。
其中,电动助力转向系统是纯电动汽车中一项重要的安全和操控性能关键技术。
传统的机械助力转向系统会采用液压助力装置,通过液压助力油泵和助力缸组成的系统,实现转向助力。
而纯电动汽车则在机械助力转向系统的基础上进一步发展,采用电动助力转向系统,将电机作为驱动力源,通过控制器调节电机输出扭矩,实现转向助力。
电动助力转向系统能够提供更好的操控性能、更灵敏的响应速度和更高的安全性。
电动助力转向系统的工作原理主要分为三个环节:感应器、控制器和电动机。
感应器通过监测车辆的转向角度和转向速度等参数,将转向信号传递给控制器。
控制器则根据感应器的信号进行数据分析,并对电动机的输出扭矩进行控制。
电动机作为一个核心部件,负责提供足够的扭矩以及转速,来驱动转向系统实现转向助力。
在纯电动汽车中,电动助力转向系统的设计需要考虑到诸多因素,如电机参数的选取、控制策略、电池能量管理等。
首先,电机参数的选取直接决定了系统的性能。
需要考虑到电机扭矩输出范围、功率密度、效率和成本等因素。
其次,控制策略的设计是系统中的关键点,它决定了转向助力的响应速度和操控性能。
控制策略需要考虑到转向信号的采样频率、滤波算法和反馈控制等。
最后,电池能量管理也是设计过程中必须要考虑的因素之一。
电池能量管理需要根据转向系统的需求来合理分配电池的能量,以提供足够的电能供给电动助力转向系统。
为了验证纯电动汽车电动助力转向系统的性能,可以通过仿真和试验两种方法进行验证。
仿真可以用来预测系统的性能和优化参数,试验则可以对系统进行实际测试和验证。
通过有效的仿真设计和合理的试验方案,可以不断优化电动助力转向系统的设计和性能。

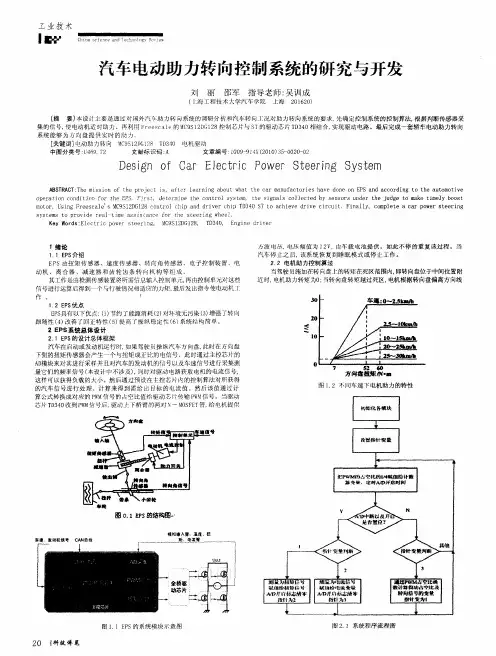
汽车电动助力转向系统研究与开发摘要:在我国科学技术不断进步的情况下,为了进一步提高汽车电动助力转向系统的快速、精确及稳定性控制,本文利用直流电动机为汽车的转电动助力转向系统向系统提供辅助动力,并通过电子控制单元等相关硬件电路,进行数字信号采集、脉宽调制输出等,然后根据单电动助力转向系统片机相关指令对电动机进行实时控制,并最终由机械传动装置实现助力转向。
本文阐述了电动助力转向系统的电动助力转向系统工作原理和结构特点,用ARM7S3C44B0X单片机为控制电路的核心部件,并实现该控制器的硬件和软件设计,电动助力转向系统实验结果表明该控制系统是有效的。
关键词:汽车电动;电动助力转向系统;研究;开发引言:随着科学技术的不断发展,汽车技术领域实现了进一步的电动助力转向系统创新,而汽车电子化则成为汽车技术当前主要发展方向。
其中,电动助力转向系统电动助力转向系统(EPS)的诞生与在汽车中的应用,能够借电动助力转向系统助这一全新动力转向系统来提升汽车操纵的轻便性与稳定性,电动助力转向系统解决了传统液压动力转向系统所存在的不足。
与以往所采用的电动助力转向系统液压转向系统相比较而言,采用电动助力转向系统能够借助电动机直接将助电动助力转向系统力提供给驾驶员,而处于非转向状态下所产生的消耗几乎为零,电动助力转向系统进而节省了燃油,同时装配应用简单、方便。
但基于目前尚未电动助力转向系统针对电动助力转向系统建立标准的模型,本文就此展开研究。
1汽车电动助力转向系统特征分析1.1耗能量低汽车电动助力转向系统相较于传统汽车转向系统而言,具电动助力转向系统有耗能量低的特征。
具体而言,传统液压动力转向系统需通过电动助力转向系统电动机带动液压油流动而产生转向动力,液压油等资源浪费严电动助力转向系统重,转向能量消耗量大电动助力转向系统。
而汽车电动助力转向系统则可更电动助力转向系统好地控制能量输出,在汽车转向时进行能量的输出,实际能耗电动助力转向系统量低,大大提升了汽车与运行期间的经济效益及安全效益。
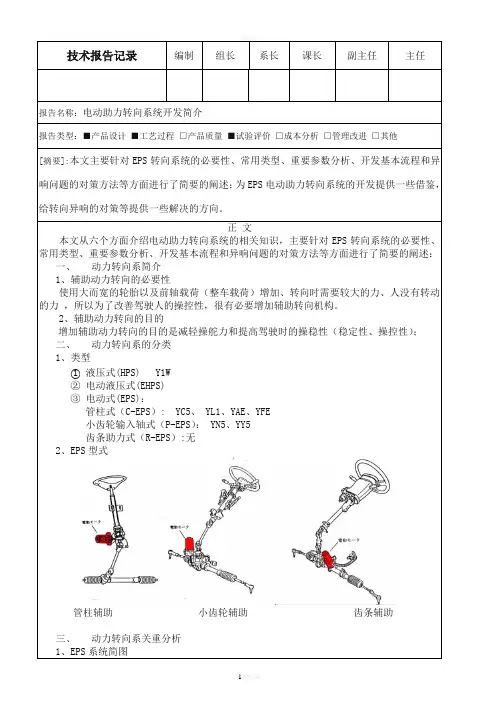
正文本文从六个方面介绍电动助力转向系统的相关知识,主要针对EPS转向系统的必要性、常用类型、重要参数分析、开发基本流程和异响问题的对策方法等方面进行了简要的阐述:一、动力转向系简介1、辅助动力转向的必要性使用大而宽的轮胎以及前轴载荷(整车载荷)增加、转向时需要较大的力、人没有转动的力,所以为了改善驾驶人的操控性,很有必要增加辅助转向机构。
2、辅助动力转向的目的增加辅助动力转向的目的是减轻操舵力和提高驾驶时的操稳性(稳定性、操控性);二、动力转向系的分类1、类型①液压式(HPS) Y1W②电动液压式(EHPS)③电动式(EPS):管柱式(C-EPS): YC5、 YL1、YAE、YFE小齿轮输入轴式(P-EPS): YN5、YY5齿条助力式(R-EPS):无2、EPS型式管柱辅助小齿轮辅助齿条辅助三、动力转向系关重分析1、EPS系统简图2、扭矩传感器扭矩传感器是通过扭力杆扭转后使两个分相器单元产生一个相对角度。
3、控制器逻辑(ECU ) 驾驶员操作方向盘时,连接方向盘的扭杆产生形变,其形变角度与方向盘的转矩成正比,转矩传感器将扭杆形变的角度转化为线性的电压输出信号T ,并与车速信号V ,发动机转速信号W ,点火信号G 送入到控制器ECU 进行综合、分析、判断和运算后,输出电流信号控制助力电机。
助力电机通过传动机构产生助力转矩,该助力扭矩施加到转向轴上,从而辅助驾驶员完成转向操作。
ECU 控制策略主要包括: 助力控制、回正控制和阻尼控制。
项目 功 能基本控制根据转向力矩值及车速大小计算得到所需输出电流控制马达运转电机反馈电流目标电流车速增大MCU 控制软件模块转向轴助力控制算法电机减速器总成转矩传感器车速传感器点火信号发动机转速TV W G I惯性补偿控制当驾驶员开始操作方向盘时改善马达的启动效果(启动力矩)转向复位控制当方向盘从极限位置向回转动时,EPS提供复位助力控制衰减控制当车辆高速过弯时调节助力输出,以防止车身出现较大摇摆增压控制对EPS ECU的电压进行增压,当驾驶员未对方向盘进行任何操作时或车辆保持直线行驶时该电压保持在0伏。
河南科技大学课程设计说明书专业课程设计任务书设计题目:电动助力转向系统的研究设计一、设计目的熟悉专业课程设计的相关规程、规定,了解电力系统,电网设计数学模型的基本建立方法和相关算法的计算机模拟,熟悉相关电力计算的内容,巩固已学习的相关专业课程内容,学习撰写工程设计说明书,对电力系统相关状态进行模拟,对电网设计相关参数计算机计算设计有初步的认识。
二、设计要求(1)通过对相应文献的收集、分析以及总结,给出相应项目分析,建立数学模型。
(2)通过课题设计,掌握电力系统计算机算法设计的方法和设计步骤。
(3)学习按要求编写课程设计报告书,能正确阐述设计方法和计算结果。
(4)学生应抱着严谨认真的态度积极投入到课程设计过程中,认真查阅相应文献以及实现,给出个人分析、设计以及实现。
三、设计任务(一)设计内容1.了解蓄电动助力转向原理,PWM电机调速原理;2.设计基于单片机的电动助力转向系统系统,包括软件和硬件;3.利用protues软件对所设计系统进行仿真;4.相关在学校图书馆中文数据库“万方数字化期刊”中查找。
(二)设计任务1.建立相关算法、模型。
2.设计说明书,包括全部设计内容,对电力系统相关状态进行模拟。
3.总体方案图,仿真软件模拟波形图,计算相关参数。
四、设计时间安排查找相关资料(2天)、确定总体方案,进行必要的计算。
(1天)、对电力系统相关状态进行模拟,计算相关参数,(2天)、使用(MA TLAB)等相关软件进行电路图系统图设计与仿真。
(2天)、撰写设计报告(2天)和答辩(1天)。
五、主要参考文献[1] 电力工程基础[2] 工厂供电,电力系统分析[3] 相关设计仿真软件手册,如(MA TLAB)等。
[4] 数学建模算法分析等[5] 电气工程设计手册等[2] 图书馆中文数据库“万方数字化期刊”其他相关网络资料指导教师签字:年月日电动助力转向系统的研究设计摘要电动助力转向系统(Electric Power Steering,缩写EPS)是一种直接依靠电机提供辅助扭矩的动力转向系统,与传统的液压助力转向系统HPS(Hydraulic Power Steering)相比,EPS系统具有很多优点。
目录一、绪论1.1 前言 (1)1.2 EPS的特点 (2)1.3 EPS系统在国内外的应用状况 (3)二、 EPS的基本构造和工作原理2.1 EPS系统结构及其工作原理 (4)2.2 EPS的关键部件 (5)2.2.1 扭矩传感器 (5)2.2.2 电动机 (6)2.2.3 电磁离合器 (6)2.2.4 减速机构 (7)2.3 EPS的电流控制 (7)2.4 助力控制 (8)2.5 回正控制 (9)2.6 阻尼控制 (9)三、EPS系统电机驱动电路的设计3.1 微控制器的选择 (10)3.2 硬件电路总体框架 (10)3.3 电机控制电路设计 (11)3.3.1 H桥上侧桥MOSFET功率管驱动电路设计 (12)3.3.2 H桥下侧桥MOSFET功率管驱动电路设计 (13)3.4蓄电池倍压电源 (14)3.5电机驱动电路台架试验 (15)3.6 结论与展望 (16)四、电动助力转向系统故障自诊断的研究4.1 故障自诊断的基本原理 (17)4.2 电动助力转向系统故障自诊断 (17)4.2.1 系统各组成部件的故障辨识 (17)4.2.2 转矩传感器故障自诊断 (18)4.2.3 电机故障自诊断 (20)4.2.4 车速和发动机转速信号故障自诊断 (21)4.2.5 电磁离合器故障自诊断 (22)4.2.6 控制单元电源线路故障自诊断 (22)4.2.7 控制单元故障自诊断 (23)4.3 故障代码显示控制及安全防范措施 (23)4.4 实例分析 (26)4.5 结束语 (27)致谢 (27)汽车电动助力转向(EPS)系统的设计绪论1.1前言转向系统作为汽车的一个重要组成部分,其性能的好坏将直接影响到汽车的转向特性、稳定性和行驶安全性。
汽车助力转向依次经历了机械式转向系统、液压式转向系统、电控液压式转向系统等阶段,国际上已有一些大的汽车公司在探讨开发的下一代线控电动转向系统。
在国外,各大汽车公司对汽车电动助力转向系统(Electric power steering-EPS,或称Elec-tric Assisted Steering-EAS)的研究有20多年的历史。
电动助力转向系统研发生产方案一、实施背景随着全球汽车工业的快速发展,消费者对汽车性能和安全性的需求日益增长。
作为汽车关键零部件之一,转向系统在提高驾驶体验和确保行车安全方面具有举足轻重的作用。
传统液压转向系统由于其能耗高、效率低等问题,已无法满足现代汽车业的发展需求。
为了应对这一挑战,我们提出了电动助力转向系统的研发生产方案。
二、工作原理电动助力转向系统(EPS)主要利用电机和减速机构为方向盘提供助力,从而提高转向的轻便性和准确性。
其核心部件包括电机、扭矩传感器、控制器和减速机构。
电机通过扭矩传感器感知驾驶员输入的扭矩,控制器根据采集的信号计算出合适的助力大小,然后驱动电机转动,通过减速机构将助力传递到方向盘。
三、实施计划步骤1.开展市场调研,分析电动助力转向系统的需求及竞争态势。
2.进行技术可行性研究,包括电机、扭矩传感器、控制器和减速机构的设计与选型。
3.搭建系统试验平台,进行性能测试与验证。
4.与汽车制造商合作,将电动助力转向系统集成到汽车中,进行实车测试。
5.根据测试结果进行优化改进,确保系统的性能和质量。
6.正式投产并推向市场。
四、适用范围本研发生产方案适用于各类乘用车、商用车以及特种车辆的转向系统升级或替换。
特别是对于那些追求高性能、高安全性和低能耗的汽车制造商和消费者,电动助力转向系统具有较大的市场潜力。
五、创新要点1.采用先进的电机技术和控制算法,提高系统的能效比。
2.设计简洁、紧凑的减速机构,降低系统成本并提高可靠性。
3.整合多种安全功能,如车道偏离预警、自动泊车等,提升驾驶安全性。
4.提供个性化设置选项,满足不同驾驶员的需求。
六、预期效果1.提高转向系统的助力效果,使驾驶更加轻松省力。
2.降低车辆能耗,实现节能减排。
3.提高车辆的安全性能,减少交通事故风险。
4.为汽车制造商提供新的盈利点,提高市场竞争力。
七、达到收益根据市场调查和分析,预计电动助力转向系统的市场需求将逐年增长。
汽车电动助力转向系统性能测试系统设计廖林清;石宏春;张君;王伟【摘要】根据汽车电动助力转向系统性能测试台架试验要求,采用VB6.0作为测试系统软件开发平台,以MPC08SP运动控制器作为交流伺服电机的上位控制单元对输入端转角、转速等进行控制,采用电液比例控制方式对输出端力、速度等进行加载,实现不同工况下转向阻力矩的模拟加载.最后对某技术成熟的电动助力转向系统进行性能测试.试验结果表明:该测试台架能稳定运行、测试精度高,可快速地实现电动助力转向系统自动化测试.%According to EPS performance test bench test requirements,VB6.0 is used as the test system software development platform,MPC08SP motion controller is used as the upper control unit of AC servo motor to realize input end drive control, and electro-hydraulic proportional control technology is used to realize the output end Drive control to realize the simulation loading of the performance of the electric power steering system in different working conditions.Finally,through a performance test of a mature electric power steering system technology.The test results show that the test system can operate stably with high test accuracy,and can quickly realize the automated testing of the electric power steering system.【期刊名称】《重庆理工大学学报(自然科学版)》【年(卷),期】2018(032)006【总页数】6页(P41-46)【关键词】电动助力转向系统;电液比例控制;性能测试;助力特性【作者】廖林清;石宏春;张君;王伟【作者单位】汽车零部件先进制造技术教育部重点实验室,重庆 400054;汽车零部件先进制造技术教育部重点实验室,重庆 400054;重庆理工大学机械工程学院,重庆400054;重庆理工大学机械工程学院,重庆 400054【正文语种】中文【中图分类】U463电动助力转向系统(electric power-assistant sterring,EPS)相比液压助力转向系统更节能、环保,并能兼顾汽车低速转向轻便性和高速直线行驶稳定性,因此得到了广泛的应用,是当前动力转向技术研究的主要方向。
学号:常州大学毕业设计(论文)(2012届)题目学生学院专业班级校内指导教师专业技术职务校外指导老师专业技术职务二○一二年六月电动助力转向系统设计摘要:随着科学技术的进步,人们越来越乐于享受科技带来的美好生活。
作为现代生活的一部分,汽车也越来越与人们的生活紧密不分,与此同时,更舒服的驾驶体验,成为新宠。
首先就是本文将研究的:电动助力转向系统,它将给我们带来更加轻松方便的驾驶体验。
电动助力转向系统即:EPS 就是英文Electric Power Steering的缩写。
电动助力转向系统是汽车转向系统的发展方向。
该系统由电动助力电机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。
另外,还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点。
正是有了这些优点,电动助力转向系统作为一种新的转向技术,将挑战大家都非常熟知的,已具有50多年历史的液压转向系统。
本文分析了汽车电动助力转向系统的基本原理,对构成系统的总体方案和控制方法进行了仿真分析,并利用DSP F2812实现控制系统的全数字化,在此基础上完成了EPS 系统控制器的软、硬件系统的开发,最后又进行了EPS系统模拟台架试验。
由于国外技术壁垒,目前国内研究EPS系统尚处在初级阶段,技术还不是很成熟,需要更多的研发人员投入到这项工作中。
所以需要更多人的努力来攻克这个技术难题,早日成熟我国的EPS设备,不再受限于国外设备,从而达到国产化。
关键词:电动助力转向系统控制系统实验控制器软件开发Design of electric power steering systemAbstract:Along with science and technology progress, the people more and more are glad enjoy the happy life which the science and technology brings.As a part of modern life, cars are more and more closely with people living without, at the same time, more comfortable driving experience, become a new favorite. First of all is that this study: electric power steering systems, it will bring us even more easy and convenient driving experience.The electric power steering system: EPS is the English abbreviation of the electric power steering. The electric power steering system is the development direction of the steering system. The system is provided directly by the electric power motor power steering, eliminating the need for a hydraulic power steering system necessary for the power steering pump, hoses, hydraulic fluids, belts and engine pulley, not only save energy, protect the environment. In addition, a simple adjustment, flexible assembly and can provide the characteristics of the power steering in a variety of conditions. It is precisely because of these advantages, the electric power steering system as a new steering technology, the challenges we are very well known, and has 50 years of history hydraulic steering system.T his paper analyzes the basic principles of automotive electric power steering system, constitute the system's overall program and controls methodology, simulation analysis, and the use of DSP F2812 all-digital control system, the EPS system controller soft on this basis, The hardware system development, and finally the EPS system simulation bench.Due to technical barriers to foreign, domestic research on EPS system is still at an early stage, technology is not mature, need more developers to join in such efforts. More efforts are needed to overcome the technical difficulties, early maturing EPS devices in China, is no longer limited to equipment in foreign countries, so as to achieve localization.Keywords: Electric power steering system Control system Experiment Controller Software development目录摘要 (I)目录 (III)1绪论 (1)1.1前言 (1)1.2汽车转向系统的发展 (1)机械液压助力 (1)电子液压助力 (2)电动助力转向系统 (2)1.3国内外电动助力转向系统的研究现状和发展趋势 (2)系统的优点 (3)课题研究的意义 (4)课题的研究目标和内容 (4)1.4EPS系统会遇到的主要问题 (4)2 电动助力转向系统的硬件设计 (4)2.1EPS系统结构及其工作原理 (5)2.2电动助力转向系统的类型 (5)转向柱助力式 (5)小齿轮助力式 (6)齿条助力式 (6)2.3本系统所用的关键器件 (7)扭矩传感器 (7)电动机 (8)车速传感器 (8)电子控制单元(ECU) (8)电流传感器 (9)控制器的芯片简介 (9)2.4本系统控制器的组成 (9)2.5EPS控制系统硬件电路设计 (10)模数转换电路设计 (10)DSP F2812 PWM输出电路设计 (10)模拟信号滤波电路设计 (11)电动机反馈电流信号输入电路设计 (11)车速信号捕获电路设计 (12)电动机正反转判定电路设计 (13)电机驱动电路设计 (13)电机电流采样电路设计 (14)2.6ECU总体架构 (15)3电动助力转向系统的控制策略分析 (17)3.1转向驱动力矩与助力矩关系 (17)3.2EPS典型助力曲线 (17)直线型助力算法 (18)折线型助力算法 (18)曲线型助力算法 (18)3.3转向系统受力分析 (19)4对电动助力转向系统的建模及仿真 (21)4.1EPS系统的动力学模型 (21)建立转向系统动力学模型 (21)建立系统状态空间模型 (22)4.2EPS系统稳定性分析 (23)5转向系统的软件设计 (24)5.1主程序模块设计 (24)5.2主程序初始化模块 (26)口初始化 (26)初始化 (27)初始化 (28)5.3信号采集模块设计 (28)扭矩和电流信号采集设计 (28)车速信号采集设计 (29)6电动助力转向系统的台架试验及结果分析 (30)6.1EPS系统试验台架简介 (30)6.2EPS系统试验台的组成 (31)6.3汽车EPS性能试验台测控系统 (32)6.4试验结果分析 (33)7.结论 (36)参考文献 (38)致谢 (39)1绪论1.1前言随着世界经济的不断发展,人们的生活水平也不断提高。
电动助力转向系统毕业设计开题报告一、选题背景和意义随着汽车行业的不断发展,电动助力转向系统在汽车领域起到越来越重要的作用。
电动助力转向系统可以通过对转向助力的控制,提供更好的操控性和驾驶舒适度,并减轻驾驶员的转向压力。
因此,对电动助力转向系统进行深入研究和开发具有重要的理论和实践意义。
二、研究内容和目标本课题主要研究电动助力转向系统的工作原理、控制方法以及其在汽车行业的应用。
具体来说,研究内容包括:1.电动助力转向系统的基本原理和工作机制;2.不同控制方法在电动助力转向系统中的应用;3.电动助力转向系统的动力学建模和仿真分析;4.电动助力转向系统的实验设计和数据分析。
本课题的研究目标主要包括:1.深入理解电动助力转向系统的工作原理和控制方法;2.分析不同控制方法的优缺点,并选择最佳的控制策略;3.建立电动助力转向系统的动力学模型,并进行仿真分析;4.设计实验验证电动助力转向系统的性能和可靠性。
三、研究方法和技术路线本课题主要采用理论研究和实验研究相结合的方法。
首先,通过查阅文献和资料,了解电动助力转向系统的基本原理和控制方法。
其次,对电动助力转向系统进行动力学建模,并通过仿真分析,验证模型的准确性和可靠性。
然后,设计实验平台,搭建电动助力转向系统的硬件环境,开展实验研究,并进行数据分析。
最后,根据实验结果和分析,总结出电动助力转向系统的性能特点和优化方向。
技术路线如下:1.理论研究:查找相关文献和资料,深入了解电动助力转向系统的基本原理和控制方法;2.动力学模型建立:基于已有的理论研究成果,建立电动助力转向系统的动力学模型;3.仿真分析:利用仿真软件,对电动助力转向系统进行仿真分析,验证模型的准确性和可靠性;4.实验设计:根据仿真结果,设计实验平台,并搭建电动助力转向系统的硬件环境;5.实验研究:开展实验研究,记录实验数据,并进行数据分析;6.总结与展望:根据实验结果和分析,总结出电动助力转向系统的性能特点和优化方向,并对未来的研究提出展望。
EV 转向系统计算报告实例1 任务EV 是在传统车的基础上设计的一款全新车型,其转向系统是在样车转向系统为依托的前提下,根据总布置设计任务书而开发设计的电液泵助力转向系统。
1 转向系统设计的输入条件 1.1 整车基本参数2 转向系统的设计计算2.1 静态原地转向阻力矩静态原地转向阻力矩是汽车中最大极限转向所需力矩,比行驶中转向所需的力矩大2到3倍。
目前采用经验公式计算:pG fM r 313=①式中Mr ——在沥青或混凝土路面上的原地转向阻力矩,N ·mm ; f ——轮胎与地面间的滑动摩擦系数,一般取0.7;G 1——转向轴负荷,N ; P ——轮胎气压,MPa 。
前轴:G 1=989×9.8=9692N,P=0.20Mpa , f=0.7, 得:Mr=4.96×105 N ·mm 2.2 齿轮齿条式转向系的角传动比θcos 1r L i ow =2cos 2L r =θπ 式中 i ow ——齿轮齿条式转向系的角传动比; L 1——梯形臂长度,mm ;r ——主动小齿轮的节圆半径,mm ;θ——齿轮齿条的轴交角,°;L 2——转向盘转一周时齿条的行程,mm ;L 1=136.365mm θ=20° L 2=48.68mm 得:r=8.2mm i ow =17.592.3 静态原地转向时作用于转向盘的力αηsin R i M F ow rh =式中M r ——原地转向阻力矩,N ·mm ; F h ——作用于转向盘的力,N ; i ow ——转向系的角传动比; R ——转向盘半径,mm ;α——转向梯形底角,单位°; η——转向器的效率,取η=75%。
M r =5.8×105 N ·mm, i ow =17.59, R=380/2=190mm, η=75%, α= 89.938°得: F h =197.89N不带助力转向,汽车以10km/h 行驶时,作用在转向盘的手力不应超过245N ②,F h =197.89<245N ,所以满足法规要求。
汽车电动助力转向系统的研究与设计罗苏安;向宝瑜;陈宇;尤虎;杨剑;吴友宇【摘要】描述了电动助力转向系统(EPS)的结构和工作原理,给出了基于MC9S12P64的电子控制单元(ECU)的设计方案,介绍了控制单元、数据采集与处理单元和驱动单元的设计,并完成了控制策略和系统程序设计,对所设计的ECU进行了台架试验和整车试验,结果证明ECU符合设计要求,能够实现在各种行驶工况下提供最佳助力转向的功能.%The structure and mechanism of an electric power steering system (EPS) were introduced. A whole design project ofMC9S12P64 - based electronic control unit( ECU) was presented. And particularly the hardware on controller,current sampling and driving circuit were designed. The control strategies and system programs were proposed. Test - bed experiment and full - car experiment were completed. Based on experimental results, the ECU has been proven effective and can achieve the best power steering function in a variety of driving.【期刊名称】《武汉理工大学学报(信息与管理工程版)》【年(卷),期】2012(034)002【总页数】3页(P190-192)【关键词】电动助力转向;控制策略;台架试验;整车试验【作者】罗苏安;向宝瑜;陈宇;尤虎;杨剑;吴友宇【作者单位】武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070【正文语种】中文【中图分类】U463.4;TM921.5随着汽车技术的发展,人们对汽车方向盘转向操纵性能的要求越来越高,既要有适度的转向轻便性,又要满足操纵稳定性[1]。
电动助力转向系统的研究与设计摘要电动助力转向系统(Electric Power Steering System,简称EPS),是汽车工程领域的热门课题之一。
本文在研究了电动助力转向系统工作原理的基础上,设计开发了EPS的电子控制单元ECU (Electronic Control Unit)的硬件电路和相应的控制软件框图。
本文详细分析了电动助力转向系统电子控制单元的功能,研究开发了以89c52单片机为微处理器的电子控制单元。
控制单元具有实时数据信号采集和系统控制功能,根据采集的数据信号,确定电动机输出的目标电流,利用PWM脉宽调制技术,通过H桥式电路控制电动机的输出电流和转动方向,实现助力转向功能。
在研制了实验用ECU装置后,开发了相应的控制软件。
控制软件分为控制策略的实现和数据信号采集与分析两部分。
整个软件系统采用了模块化的设计思想。
在数据信号采集与控制部分,设计了系统主程序、A/D采集程序、车速信号采集程序和PWM控制程序。
本文所设计的EPS电子控制单元性能稳定,结构合理,与整车匹配性能好,可保证EPS实现良好的转向助力效果。
关键词:电动助力转向电子控制单元单片机控制策略Electronic power steering system Research and DesignABSTRACTElectric Power Steering System (EPS) is one of the focuses research in automotive engineering. This paper is based on the principles of EPS to study the operation, designed and developed the Electronic Control Unit (ECU) and the soft ware diagram of the ECU.The thesis Considers the functions of the electronic control unit of EPS, studied and developed the hardware that adopted 89c51as its microprocessor. The control unit was able to realize real-time data/signal acquisition and system control. The target current of motor output could be determined by the obtained data; and utilizing the Pulse-Width Modulation (PWM) technology, power could be provided to the steering system by controlling the output current and rotation direction through H-bridge circuit.The software program, which was divided into the realization of control strategy and the acquisition & control of data/signal, was developed in modular after the design of experimental ECU was completed. And the main program, A/D acquisition program, speed signal acquisition program and PWM control program are developed in the second part.The result showed that the electronic control unit designed was with stable performance, appropriate structure and excellent matching condition, and the excellent power steering effect could be ensured by EPS.Key words: Electric Power Steering System (EPS) Electronic Control Unit Single-Chip Microprocessor Control Strategy目录前言 (1)第1章绪论 (2)1.1汽车电动助力转向系统的特点 (2)1.2电动助力转向系统国内外的研究现状 (4)1.3 EPS的发展趋势和急待解决的核心技术 (5)1.4本课题研究的目的与意义 (6)第2章电动助力转向系统方案确定及工作原理 (7)2.1电动助力转向系统的工作原理 (9)2.1.1电动助力转向系统的组成和工作原理 (9)2.1.2电动助力转向系统的分类 (11)2.1.3电动助力转向系统的技术要求 (12)2.2电动助力转向系统的数学模型 (13)2.2.1转向盘和转向柱输入轴子模型 (14)2.2.2电动机模型 (14)2.2.3输出轴子模型 (16)2.2.4齿轮齿条子模型 (16)2.3电动助力转向系统的主要部分 (17)2.3.1转矩传感器 (18)2.3.2车速传感器 (19)2.3.3直流电动机 (20)2.3.4电磁离合器 (21)2.3.5减速机构 (22)2.3.6电子控制单元ECU (23)第3章电动助力转向系统的硬件设计 (24)3.1电子动力转向系统控制器的总体结构 (24)3.2控制器微处理芯片的选择 (26)3.2.1控制器微处理器常用芯片及选型 (26)3.2.2 89C52芯片及A/D转换芯片介绍 (26)3.2.3 89C52外部总线扩展及片外ROM的连接 (28)3.3控制器输入通道的设计 (30)3.3.1转矩信号的采集 (30)3.3.2电动机电流信号的采集 (31)3.3.3车速信号的采集 (33)3.4控制器输出通道的设计 (34)3.4.1电动机的PWM控制 (34)3.4.2电磁离合器和显示控制电路的设计 (39)3.4.3 电动机保护电路及继电器驱动电路设计 (40)3.5系统供电电源电路设计 (41)3.6系统硬件抗干扰措施 (42)第4章电动助力转向系统的软件设计 (45)4.1 EPS的控制策略 (45)4.1.1 EPS的PID控制 (45)4.2电子动力转向系统各功能模块的软件设计 (48)4.2.1 A/D采集程序 (48)4.2.2 PWM控制程序 (49)4.2.3车速信号采集程序 (51)4.2.4系统主程序 (53)结论 (55)谢辞 (56)参考文献 (57)附录 (59)外文资料翻译 (66)前言转向系统作为汽车的一个重要组成部分,其性能的好坏将直接影响到汽车的转向特性、稳定性和行驶安全性。
某款纯电动汽车电动助力转向系统设计开发
0 引言
以某款汽油车型改款纯电动汽车为例,探讨转向系统在纯电动车型上的开发设计。
由于汽车动力系统改变,取消了内燃机,同时取消了由内燃机驱动的液压助力泵,因此需要寻找新的结构来实现转向助力功能。
对于纯电动车最优选方案是全部采用电气化设备,即选用EPS(Electrical Power Steering System,电动助力转向系统),依靠电机提供辅助扭矩的转向助力。
1 转向系统介绍
电动助力转向系统可选择的方案有3 种:EHPS (Electrically Powered Hydraulic Steering System,电动液压助力转向),C-EPS(Column Type Electrical Power Steering System, 转向轴式电动助力转向),R-EPS(Rack Type Electrical Power Steering System, 齿条式电动助力转向)。
3 种方案的优缺点对比见表1。
综合考虑功能实现、成本优化、批量生产等因素,最终在公司现有车型上选择借用C-EPS 方案。
C-EPS 是在转向管柱上加装转向助力模块,通过电机达到助力效果。
助力模块
包含扭矩和角度传感器、助力电机、减速机构和ECU(Electronic Control Unit ,电子控制单元)。
EPS 的工作原理是驾驶员操控转向盘进行转向时,扭矩传感器检测到转向盘的扭矩;车速传感器测出车辆的行驶速度,将这个信号输送到ECU,ECU 根据内置的控制策略,计算出助力力矩,以电流信号形式向电机控制器发出指令;电机输出相应的转向助力扭矩,经过减速机构作用在机械式转向系统上,和驾驶员的操纵力矩一起克服转向阻力矩,实现车辆转向。
2 结构设计
C-EPS 转向系统是基于原车型基础开发,为保证整车布置变化量最小,转向系统硬点不变。
由于转向管柱总成集成电子助力模块,导致体积增大,需考虑部件的空间布置。
同时,转向管柱总成重量增加,需对其下安装支架进行重新设计,仪表横梁支架的刚性需要相应增大。
综合考虑整车通用化及相关部件变更最小化,转向管柱总成的安装形式仍采用原车型的4 点式固定方式,满足强度要求。
考虑车辆碰撞法规要求,管柱的溃缩行程需不小于50 mm。
C-EPS 转向传动轴所传递的扭矩相比原车型更大,因此轴的直径增加,外径由Φ22.5 mm 增加至Φ24 mm。
由于硬点不变,相位角保持在(19.5±1.5)°,小于设计要求值30 °,有利于转向力矩波动控制在±5%范围内。
采用机械式转向机替换原车液压式齿轮齿条转向机,所以取消液压缸,齿轮室没有油孔,小齿轮无需配置油路,相比原结构简化。
机械式齿条直径由Φ24 mm 增加至Φ25 mm,以输出更大扭矩,同时线角传动比增大,改善转向响应。
汽油车与电动车的转向部件实物对比见表2。
3 计算校核及助力性能设计
车辆的动力系统变更为动力电池模块,整车重量增加255 kg,前轴重量增加71 kg,见表3。
转向器输出扭矩增大,对转向器输出扭矩和电机助力进行计算校核。
3.1 转向器最大输出扭矩
汽车转向过程中主要克服原地转向阻力矩、重力回正力矩和转向系统的内部摩擦阻力。
根据经验,汽车满载时原地转向需克服的转向阻力矩和回正力矩都是最大。
转向器的最大输出扭矩满足式(1)
式中:TMAX 为转向器最大输出扭矩;Mr 为原地转向阻力矩;MG 为重力回正力矩。
原地转向阻力矩,根据半经验公式(2)得到
式中:f 为轮胎和路面的滑动摩擦系数,取值0.7;G1 为满载前轴载荷,kg;P 为轮胎气压,MPa。
回正力矩为
式中:R 为轮胎静半径,mm;σ为主销内倾角,°;rs 为主销偏移距,mm;δ为轮胎内转角,°。
最大齿条力为
式中:FR 为最大齿条力,N;Ff 为转向系统内部摩擦力,取值200 N;L 为转向节臂长,mm。
3.2 EPS 电机助力性能校核
从现有产品库中,选择无刷交流电机,减速机构采用蜗轮蜗杆式。
根据EPS 工作原理,作用在转向盘上的人手力矩加上电机助力通过转向传动轴作用在转向器上。
转向器的齿轮与齿条配合,转为齿条输出力,通过拉杆推动车轮转向。
具体公式为
得出公式
考虑电机需要有10%的设计余量,得出
式中:TM 为电机计算得出的输出扭矩,Nm;TM'为留有10%设计余量的输出扭矩,Nm;i 为减速机构传动比;TH 为人手最大操纵力,取值8 Nm;S 为转向器线角传动比,mm/rev,取值见表3;EPS减速机构传动效率ηG=0.9;中间传动轴传动效率ηU=1;转向器传动效率ηP=0.9;其他参数见表4。
结合表3 计算得:Mr=603.8 Nm,MG=89.7 Nm,FR=8 868.6 N。
将数值代入式(6 ),得出TM=3.11 Nm,(1+10%)×TM=3.42 Nm<3.7 Nm(选用电机的额定扭矩),因此选用的无刷电机可以满足转向系统要求。
3.3 助力性能设计及评价
EPS 需要对助力参数进行调试,最终满足转向性能要求。
由于前述电动助力模块是借用传统汽油车车型,所以需对现有车型进行助力特性曲线优化,如图1 所示。
助力特性曲线的横轴为转向盘处的扭矩输入,纵轴为控制助力的电流输出,不同曲线代表不同车速下的助力特性。
曲线从上到下的车速逐级增加,范围为0~120 km/h,共选择了8 条曲线,如图1(a)所示。
为了改善驻车及低速行驶时人手操纵力重的问题,增加了驻车状态和低速曲线的斜率,增大了电机助力;为了改善中高速转向时人手操纵力轻的问题,减小了中高速曲线的斜率,减少电机助力,增大车辆高速行驶时人手操纵力;为了增加转向响应的灵敏度,调整了曲线横坐标起始点,增强中心感;为了增加转向线性感,对不同车速曲线的间隔进行调整,使全车速的驾驶力均匀增加。
优化后曲线如图1(b)所示。
通过以上优化,得到如下主观评价结果:
1)静态下,曲线坡度增加,使车辆静止状态转向力减少;
2)动态时,在高速区间减小转向助力,改善操纵稳定感;
3)全车速范围内,中心感及转向力增大;
4)全车速范围内,改善转向线性感。
4 实车验证
将优化后的电动助力转向系统进行实车验证。
在一般道路行驶1 500 km 进行磨合试验;在试验场的长直路段和高环路进行性能试验;分别在城市工况、强化路、20%爬坡和高
环路进行里程1 500 km 的可靠性试验;最后分别在城市工况、山路和一般公路进行里程27 000 km 的实际道路试验。
试验结果表明该款纯电动车的电子转向助力系统满足转向性能要求,试验过程中无批量性不良问题发生。
5 总结
介绍了某款汽油车改制为纯电动车过程中,转向系统由液压助力改为电动助力的设计开发方案。
1)技术方案研讨。
在选择电动助力方案时,需要综合考虑功能实现、成本优化、批量生产等因素,为实现成本最低、开发周期最短、可靠性强,最终选择借用公司现有车型的助力模块,采用管柱式电动助力方案。
2)结构设计及安装方案。
考虑到使整车布置的变化量最小,则在硬点不变的原则下进行转向系统的结构设计。
转向管柱增加助力模块,体积和重量相应增加,需要变更安装方式。
同时转向传动轴的直径增大,实现传递更大扭矩。
转向器由液压式变为机械式,为提高转向响应,增大齿轮齿条的传动比。
3)设计计算校核。
电动车的前轴重量增加,转向扭矩增大,对转向器齿条最大拉力进行计算,校核电机助力可以满足转向系统的扭矩要求。
4)助力性能设计。
助力特性影响驾驶转向性能,整车状态下调试EPS,对助力曲线进行优化,实车评价满足设计要求。