异步电动机温度场仿真分析
- 格式:docx
- 大小:146.30 KB
- 文档页数:15
信息工程学院基于Matlab的三相异步电动机起动、调速和制动特性仿真摘要:异步电动机目前在日常生活中已得到广泛应用,其主要特点为结构简单、运行可靠、效率较高和成本较低。
为使其应用更加广泛且性能更加完善,有必要对其最基本的起动、制动和调速性能进行深入研究。
而随着电机研究的不断深入,仿真就成为对其进行研究的一个重要手段,其中Matlab软件以其方便、高效、直观的特点,广泛应用于异步电动机的仿真研究,方便快捷且节约资源,为解决一些复杂问题带来了极大的方便。
本文通过Matlab软件进行仿真,研究异步电动机起动、调速和制动的各种方法,以找到提高其性能的途径,并通过与理论相对比,验证了本文模型的有效性和正确性。
关键词:Matlab;仿真;异步电动机Simulation for Start-up ,Speed Control and Braking Character of Three-phase Asynchronous Motor Based onMatlabAbstract:Asynchronous motor has been widely used in our daily life at present, the main characteristics of simple structure, reliable operation, high efficiency and low cost. In order to make its application more widely and performance will be improved, it is necessary for the most basic starting, braking and speed regulating performance for further research. And with the research of motor, the simulation has become an important means to study, the Matlab software, with its convenient, efficient and intuitive features, are widely used in the simulation research of asynchronous motor is convenient and save resources, to solve some complex problems has brought great convenience.Based on the Matlab software simulation, the asynchronous motor starting, speed and braking methods, in order to find ways to improve its performance, and compared with the theory, proves the correctness and the effectiveness of the model. Key words:Matlab; simulation; asynchronous motor1 设计目的和意义1.1 概述在科学技术发展迅速的当今社会,电机已经成为生活中必不可少的一部分,为人们的生产生活提供了极大的方便。
城轨车辆用异步牵引电机的电气分析与仿真引言:城轨交通系统在现代城市中发挥着至关重要的作用,而城轨车辆的动力系统中的牵引电机则是其中的核心组成部分。
异步牵引电机作为一种常见的技术选型,具有结构简单、可靠性高、维护成本低等优点。
本文将对城轨车辆用异步牵引电机的电气特性进行分析与仿真,旨在深入探讨其工作原理、性能指标以及电气仿真模型的构建方法。
1. 异步牵引电机的工作原理异步牵引电机是一种交流电动机,其工作原理基于电磁感应。
当电动机的定子绕组通过三相交流电源进行供电时,会在定子绕组中产生一个旋转磁场。
而感应电动机的转子则是通过磁场的作用而旋转。
由于转子上没有任何电源供电,因此称之为异步电动机。
2. 异步牵引电机的性能指标2.1 额定功率和额定转速城轨车辆用异步牵引电机的额定功率决定了其最大输出功率的能力,而额定转速则决定了电动机的运行速度。
这两个性能指标对于设计和选择电动机具有重要的意义,由于城轨车辆行驶速度较高,因此对于牵引电机的额定转速有一定的要求。
2.2 效率城轨车辆用异步牵引电机的效率是指电动机的输出功率与输入功率之间的比值。
高效率的牵引电机能够提供更大的牵引力,降低能源消耗和碳排放。
2.3 起动和制动特性城轨车辆在起动和制动过程中对牵引电机的要求较高。
起动特性包括起动时间和起动电流,而制动特性则包括制动力和制动距离。
优秀的起动和制动特性能够提高城轨车辆的行车安全性和运行效率。
3. 异步牵引电机的电气仿真模型为了更好地理解和优化城轨车辆用异步牵引电机的性能,电气仿真模型被广泛应用于电机系统的研究中。
建立电气仿真模型可以帮助工程师模拟不同工况下电动机的工作情况,并对性能指标进行评估。
3.1 定子电压和转矩方程异步牵引电机的电气仿真模型可以通过定子电压和转矩方程来描述其工作状态。
定子电压方程是基于电压平衡原理,而转矩方程则是根据磁动势平衡原理建立的。
3.2 转子电流方程转子电流方程是描述异步牵引电机转子状态的重要方程之一。
电机热仿真案例今天来给你唠唠电机热仿真这个事儿。
就好比我们要给电机做个体检,看看它在工作的时候会不会发烧啥的。
先来说说我们这个电机的情况吧。
这是一个工业生产线上常用的电机,功率还不小呢,就像一个大力士,天天都在那儿拼命干活。
那为啥要做热仿真呢?你想啊,电机工作的时候就像人在跑步,跑久了身体就会发热。
电机要是太热了,就会出问题,可能就会像人中暑一样,突然罢工,那生产线可就麻烦大了。
我们开始做热仿真的时候,首先得建立电机的模型。
这就像是给电机画个像,把电机的每一个部件,什么定子、转子、线圈啊,都画得清清楚楚的。
这就像搭积木一样,一块一块地把电机在电脑里搭起来。
不过这可不像搭真正的积木那么简单,每个部件的尺寸、材料特性都得考虑进去。
比如说,定子的材质是铁,它导热的速度就和线圈那种铜材质不一样,就像铁和铜在传递热量的时候有自己的个性一样。
然后呢,我们要设定电机的工作条件。
这电机在生产线里可不是悠闲地晃悠,它有一定的转速,还有负载呢。
这就好比你让一个人跑步,你得告诉他跑多快,还要给他背上多重的包一样。
我们得把电机的转速、负载这些条件都告诉电脑,这样电脑才能模拟出电机真实的工作状态。
好了,模型建好了,工作条件也设定了。
现在就开始让电脑模拟电机工作发热的过程啦。
电脑就像一个超级大脑,它根据我们给的信息开始计算电机每个部位的温度变化。
就像有无数个小温度计在电机的各个角落测量温度一样。
过了一会儿,结果出来了。
哇塞,我们发现电机的线圈部分温度升得特别快。
这就好比电机的心脏(线圈就像电机的心脏一样重要)在快速发热呢。
为什么会这样呢?原来啊,我们发现是因为电机在这种高负载的情况下,线圈里的电流很大,电流就像调皮的小精灵,在里面跑来跑去的时候就会产生很多热量。
而且呢,线圈周围的散热条件不是很好,就像把一个小火炉放在一个小角落里,热量散不出去。
那怎么办呢?这就像医生给病人开药方一样,我们得想办法给电机降温。
我们提出了几个方案。
三相异步电机设计温度
三相异步电机的设计温度主要受到绝缘材料的热稳定性影响。
不同级别的绝缘材料能够承受不同的最高工作温度。
国际电工委员会(IEC)将电机绝缘系统分为了不同的温度等级,并规定了每个温度等级的最高允许工作温度。
一、绝缘温度等级及其最高允许工作温度:
Y等级:最高允许温度90°C
A等级:最高允许温度105°C
E等级:最高允许温度120°C
B等级:最高允许温度130°C
F等级:最高允许温度155°C
H等级:最高允许温度180°C
C等级:最高允许温度以上限不设定,但一般认为在200°C以上
二、设计考虑:
在设计三相异步电机时,应根据应用环境和要求选择合适的绝缘等级,并确保电机在最不利工况下的温升不超过该绝缘等级的最高允许温度。
电机的温升是指电机在运行状态下的温度与环境温度之差。
1.冷却系统:设计合适的冷却系统,如风扇冷却、水
冷或油冷,以确保电机的有效散热。
2.材料选择:选择适合的绝缘材料和导线材料,以满
足温升要求。
3.尺寸设计:合理设计电机的尺寸和结构,以确保足
够的散热面积。
4.负载匹配:确保电机在实际工作条件下不会过载,
避免过高的温升。
通过以上设计考虑,可以确保三相异步电机在长期运行中保持稳定的性能,延长其使用寿命。
Fluent电机最高温度仿真简介在工程设计中,对电机的温度进行仿真分析是非常重要的。
电机在工作过程中会产生大量的热量,如果温度过高,可能会导致电机性能下降、寿命缩短甚至故障发生。
因此,通过Fluent软件进行电机最高温度仿真分析,可以帮助工程师优化电机设计,提高电机的工作效率和可靠性。
本文将介绍Fluent电机最高温度仿真的基本原理、步骤和注意事项,并提供一些实际案例,帮助读者理解和应用Fluent软件进行电机最高温度仿真。
原理Fluent是一款流体力学仿真软件,可以模拟流体流动和传热过程。
在电机最高温度仿真中,Fluent可以通过求解流体流动和传热方程,计算电机内部的温度分布。
电机最高温度仿真的基本原理如下:1.建立电机的几何模型:首先需要将电机的几何形状转换为计算机可识别的几何模型,通常使用CAD软件完成。
几何模型应包括电机的转子、定子、风扇等部件。
2.网格划分:将电机的几何模型划分成小的单元,形成网格。
网格的划分对仿真结果有很大影响,需要根据电机的几何复杂度和计算资源进行合理的网格划分。
3.设置边界条件:定义电机的边界条件,包括入口条件、出口条件、壁面条件等。
入口条件可以设定电机的供电电压和转速,出口条件可以设定电机的排热方式。
4.定义材料属性:根据电机的材料性质,设置热传导系数、密度、比热等参数。
5.求解流动和传热方程:根据电机内部的流动和传热特性,建立流动和传热方程。
通过迭代求解这些方程,得到电机内部的温度分布。
6.分析结果:根据仿真结果,分析电机的最高温度分布和热点位置。
如果温度超过了电机的承受范围,需要重新优化电机的设计。
步骤进行Fluent电机最高温度仿真的步骤如下:1.准备电机的几何模型:使用CAD软件绘制电机的几何模型,并将其导入Fluent软件。
2.划分网格:在Fluent软件中,使用网格划分工具对电机的几何模型进行网格划分。
划分网格时需要注意,网格的划分应该足够精细以捕捉电机内部的细节,但也不能过于细致以至于导致计算资源不足。
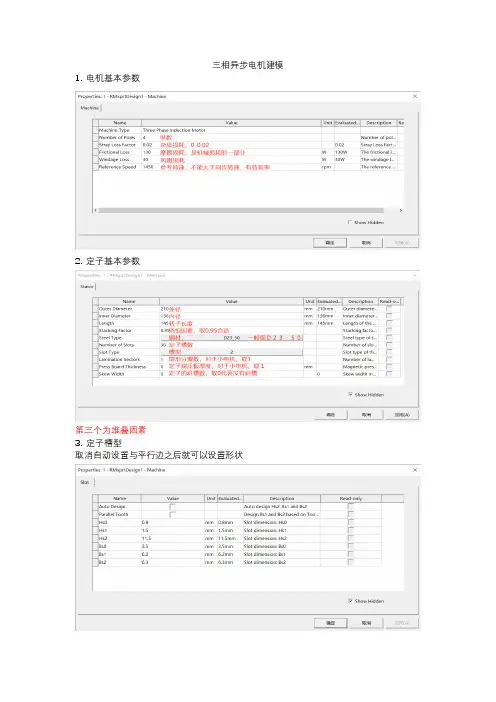
三相异步电机建模1. 电机基本参数
2. 定子基本参数
第三个为堆叠因素
3. 定子槽型
取消自动设置与平行边之后就可以设置形状
4. 定子绕组
并联支路数最多取2p个,但不是任意取 2p需要为并联支路数的整数倍,相互并联的级相组的个数要匹配,在并联时,最小的单位是级相组数级相组数的大小为每级每相槽数(对于双层绕组来说)对于单层绕组来说级相组的大小为每级每相槽数的一半
5. 匝间连接方式与导线规格问题
6. 端部与绝缘槽设置问题
7. 转子设置
8. 转子槽型
9. 转子绕组
10. 转轴设置
11. 电机仿真设置
maxwell仿真部分
一、建立maxwell模型
在analyze后使用create maxwell design创建二维/三维模型
二、maxwell仿真分析基本思路:
稳态,用电流源仿真;在给定转速之后看产生的转矩是不是与标准转矩相等从零开始转动,用电压源仿真;在给定负载之后看转速是不是与转差相等。
1. 绕组激励设置
2. 转矩负载设置
1. 绕组激励设置
2. 转矩负载设置。
目录摘要 (2)1 设计意义及要求 (3)1.1设计意义 (3)1.2设计要求 (3)2异步电动机动态数学模型 (4)2.1异步电动机的三相数学模型 (4)2.2坐标变换 (8)2.2.1坐标变换的基本思路 (8)2.2.2三相-两相变换(3/2变换) (9)2.2.3静止两相-旋转正交变换(2s/2r变换) (10)2.3以ω-i s-ψr为状态变量的状态方程 (11)2.3.1 dq坐标系下状态方程 (11)2.3.2 mt标系下状态方程 (13)2.4 mt标系上异步电动机的动态结构图 (15)3异步电动机模型仿真 (15)3.1 仿真模型的参数计算 (15)3.2 建模与仿真 (16)3.2.1AC Motor模块 (16)3.2.2坐标变换模块................................................................ 错误!未定义书签。
3.2.3仿真模型 ........................................................................ 错误!未定义书签。
3.3 仿真结果分析 (21)3.3.1仿真波形 (21)3.3.2起动和加载的过渡过程分析 (23)结束语 (24)参考文献 (25)摘要异步电动机具有非线性、强耦合、多变量的性质,要获得高动态调速性能,必须从动态模型出发。
异步电动机的动态数学模型由磁链方程、电压方程、转矩方程和运动方程组成,非线性耦合在电压方程、磁链方程、与转矩方程中均有体现,相当复杂。
在实际应用中必须予以简化,简化的基本方法是坐标变换。
异步电动机的三相原始动态模型依次通过3/2变换、2s/2r变换,转换为旋转正交坐标系(dq坐标系)下的动态模型,若令d轴与转子磁链矢量重合,称为按转子磁链定向的同步旋转坐标系,简称mt坐标系。
通过按转子磁链定向,得到了以定子电流的励磁分量和转矩分量为输入的等效直流电动机模型。
2020年6月第39卷第2期内蒙古科技大学学报JournalofInnerMongoliaUniversityofScienceandTechnologyJune,2020Vol.39,No.2异步电动机在变化负载状态下联合仿真模型的数值计算于明星1,杨丽2(1 朝阳师范高等专科学校信息工程系,辽宁朝阳 122000;2 沈阳理工大学装备工程学院,辽宁沈阳 110159)摘 要:为研究三相异步电机的电磁特性及运行特性,采用Ansys有限元软件的高计算精度,对感应电动机进行联合仿真 建立7 5kW鼠笼型三相异步电机的Maxwell有限元模型,将有限元模型导入AnsysSimplorer中,建立电路与磁路联合仿真模型,提出一种定子绕组拆分策略,策略解决了AnsysSimplorer中电压源与定子绕组三角形直接相连错误故障的问题 在电机的输出端设定转动惯量,利用状态机特征模块模拟负载转矩的变化情况 基于磁路和等效电路的计算法,对电机变化负载工况的电流、转矩和转速进行分析和计算 基于磁场的计算法,采用二维瞬态交变磁场求解器分析电机变化负载的瞬态电磁场的变化情况 最后,求出气隙磁密的分布,提取谐波幅值的含量,分析谐波对电机的影响,仿真结果对电机控制策略的研究提供思路借鉴关键词:异步电动机;有限元;联合仿真模型;瞬态电磁场;谐波分析中图分类号:TM346 文献标识码:A文章编号:2095-2295(2020)02-0164-07 DOI:10.16559/j.cnki.2095-2295.2020.02.013 三相异步电动机是我国工农业生产中应用比较广泛的电机,其安全稳定运行状况决定着我国经济的发展状态[1] 三相异步电机在工作过程中,往往会因各种状况,负载会突然发生变化,此时电动机会经历一个过渡过程,如轧钢机的负载 在突加负载、突卸负载等扰动作用下,引起转子转速、相电流和电压等电磁参数突变,此时会产生较大的暂态电流和较大的损耗[2],那么异步电机突变负载的运行分析和电磁场计算显得尤为重要异步电机的计算机仿真技术可以帮助工程师掌握在不同工况下如何进行优化,大大缩短了设计时间,节约了在测试过程中的设计成本[3] 工业电机的负载变化影响着电力系统的用电负荷[4]的变化,异步电机变化负载特性研究对于电力系统的经济运行具有重要意义 2017年法国康普工业大学NGUYENHP[5]提出一种新的基于非线性最优控制理论的异步电机转速估计方法,并通过实验证明了该方法的鲁棒性 英国突尼斯大学REGAYA在NGUYEN的基础上,提出一种考虑低速负载转矩变化敏感性的自适应反推方法,并对3kW感应电机进行了稳定性和动态性的测试[6] 赫尔辛基理工大学POPESCUM[7]通过对称分量和轴对称理论来精确计算起动力矩,得到电机的不同转矩分量的转矩特性 进而KURIHARAK[8]对带有斜槽的单相永磁电容启动式电机的稳态和瞬态性能进行数值计算 文献[9]结合矢量控制模型分析了负载转矩从1N·m到2 5N·m的同步电机的动态运行过程,仿真结果表明了该方法的稳定性 中国科学院学者郝龙等[10]搭建了45kW的永磁同步电机转子实验测试平台,对不同负载工况下的轴系动力学特性进行研究 文献[11]建立了一种用于变频电机实验的多转矩类型负载系统,通过调节供电电压和频率来模拟多种类型的动态负载,并通过仿真确定了该系统的使用频率范围 德尔切夫大学VASILIJAS基金项目:辽宁省自然科学基金指导计划项目资助(201602650)作者简介:于明星(1987-),男,朝阳师范高等专科学校讲师,硕士,研究方向为电机电磁场和温度场问题 通信作者:e mail:beihesa@hotmail.com收稿日期:2019-12-19于明星,等:异步电动机在变化负载状态下联合仿真模型的数值计算分析了凸极同步电机、感应式鼠笼异步电机在不同电机参数情况下的电磁场、磁通密度的变化情况[12] 在静态场中的0Hz频率和50Hz的条件计算了谐波分解后气隙的磁通密度,文中未提及外部瞬态特性的分析 文献[13]采用了基于等效电路和基于磁场两种有限元分析方法,分析了直线感应电机的负载和空载状态磁场分布情况 DINGW等[14]建立了开关磁阻电机ECE等效电路模型,将其与Simplorer进行耦合进行电机调速,并且验证了模型的正确性 ANDRESD[15]提出了一种新型的基于三相等效电路的感应电机分析方法,利用电压源和电流源来控制机电耦合系统,分析了感应电机的瞬态响应 捷克布尔诺科技大学KLIMAJ等[16]建立了三相双极高速感应电机有限元分析的联合仿真模型,在样机测试实验后通入实验电源和变频器后具有较低的谐波失真,在f=15kHz的情况下通过实验验证了联合仿真模型有效性 瑞典吕勒奥理工大学(LuleaUniversityofTechnology)LABIODC等[17]提出一种基于场路耦合的开关磁阻电机非线性磁特性分析法,求解了电磁转矩和定子电流与转子旋转角间动态变化情况现阶段研究中三角形型接法感应电机的联合仿真模型不常见,因Simplorer中不允许电压源直接连接到绕组 关于变化负载的瞬态气隙磁密分析地研究涉及不足,更多研究的是静态和动态过程的分析 作者曾分析了单项变压器[18]的动态过程,对于笼型异步电机的联合仿真模型及拆分策略在文献[19]已中有提及 在现有成果基础上,利用Ansys有限元分析软件,将Simplorer与Maxwell进行联合[20]仿真,不仅能观测电机运行的外部特性,还能查看电机内部的磁场瞬态变化情况,对电机的工作过程及运行状态的分析更直观 构造了角型接法的空载和变化负载的联合仿真模型,分析了瞬态磁场和性能参数,对变化负载的瞬态过程的气隙磁密进行了谐波分解,提取了谐波幅值的含量1 异步电动机的有限元模型建立1.1 电机基本参数设计了一款全封闭自冷式中型鼠笼式异步感应电机,采用F级绝缘,温升按B级绝缘考核,防护等级提高到IP54,机座采用平行垂直分布的散热筋,接线盒采用铝合金压铸,其基本尺寸如表1表1 电机的相关尺寸参数参数数值额定功率/kW7.5额定电流/A15.6定子外径/mm210转子外径/mm135额定转速/(r·min-1)1440额定电压/V380定子内径/mm136转子内径/mm48该电机工作温度为75℃;电压源频率为50Hz;磁极数为4;定子槽数为36个;转子槽数为28;定子和转子铁芯轴长为145mm;线规为2股作为1匝,直径为0 95mm的铜线,每槽35匝,定子绕组采用三角形连接方式,节距为1~9的短距绕组 1.2 模型假设为了建立电机内部磁场的微分方程,确定求解区域[22]和有限元法求解的边界条件[7,8],提出如下假设条件:(1)在模拟实际磁场时,选取Cartesian坐标系和国际单位制mm;(2)对于定子槽口、扇形片、磁极冲片的部分圆角、倒角进行近似处理 忽略端部效应,磁场沿轴向均匀分布;(3)电机外部磁场忽略 定子外表面圆周和转子内表面圆周为零矢量位面 不计交变磁场在定子绕组、铁心冲片及机座中的涡流反应,电机扇面的求解域模型如图1所示 场域内满足边值条件x1μAz()x+y1μAz()y=-JzAz|AD+Az|BC=0Az|AB,CD=0 (1)式中:Az为z方向的矢量磁位;Jz为电流密度;μ为材料的磁导率图1 电机扇面的求解域模型561内蒙古科技大学学报2020年6月 第39卷第2期1.3 几何模型建立(1)在Maxwell3DDesign建立的三维几何模型,如图2所示,在联合仿真计算时取1/4模型;(2)转子导条材料选用铸铝,转轴采用不锈钢材料,机座采用铸铁材料,铁心采用热轧硅钢片;(3)采用狄里克莱矢量边界条件,加在求解域的边线上 边线上的所有点满足式(2):rAB=Const (2)式中:Const为常数,将其值设为0时,描述的是磁力线平行于给定的边界线 Aθ为θ方向矢量磁位;r为定子外径 式(2)适用于RZ坐标系图2 异步电机的3D几何模型1.4 网格划分划分过程中,将气隙和齿部的网格划分细致些,将轭部、定子铁心、转子铁心划分的粗糙些 其中气隙和齿部采用边界层SurfaceApproximation划分方式,其余部分采用物体内部InsideSelection划分方式 由于电机具有4极,磁场对称分布,故取模型的1/4进行运算,可以保证计算精度,减少计算时间网格,如图3所示图3 截面模型划分网络图1.5 模型的求解模型中转子中存在运动状态,瞬态磁场求解器矢量磁位A满足式(3)场方程:×v ×A=Js-σA t-σ v- ×Hc+σv× ×A (3)式中:Hc为永磁体的矫顽力;v为运动物体的速度;A为矢量磁位;Js为源电流密度由几何关系,弧长对应的角度关系满足θ360°=L2πR (4)式中:L为1/4单元电机旋转过的弧长;R为所要考虑位置点距轴心的距离,由式(4)可知电机旋转电角度计算公式:θ=180LπR (5)1.6 场计算器场计算器具有拓展Maxwell后处理的计算功能,利用对初始场量的矢量计算清晰明确的阐述麦克斯韦方程组 常用的初始场量有磁场强度H,磁感应强度B,电流密度J 场计算器是通过安全宏来驱动的,在操作过程中通过宏语言来实现,在参数分析和设计中体现了宏语言重复性的优势 场计算器能够实现如下计算:(1)指定几何实体的场量与导出量;(2)特定几何实体线、面和体上积分计算;(3)场计算结果目标空间域或多数据点的导出 文献[21]中说明了切向磁密分量占总磁密的比例很小,故仅分析气隙的法向磁密 场计算宏语言操作顺序为Quantity/B→Geometry/Line/Polyline→UnitVec/Normal→Dot→Geometry/Line/Polyline 值得说明的是Polyline为气隙中自行绘制的弧线气隙法向磁密为Bn=Bxcosθ+Bysinθ (6)式中:Bx为磁密x轴分量;By为磁密y轴分量;θ指柱坐标下的磁密与x轴方向夹角2 样机实验系统为研究模型的合理性,对相似结构的样机,以同样的连接方式进行试验,样机的参数如表2实验设备采用浙江天煌科技实业有限公司定制的DDSZ1型电机与控制实验平台,其连接方式如图4所示 利用毫秒级时间继电器控制负载变化 实验过程中测得了A相入线端的相电流和电机的转速661于明星,等:异步电动机在变化负载状态下联合仿真模型的数值计算表2 样机相关尺寸参数参数数值额定功率/W100额定电流/A0.5定子外径/mm120转子外径/mm70.6额定转速/(r·min-1)1420额定电压/V220定子内径/mm71转子内径/mm20.2图4 样机实验台3 联合仿真模型在Simplorer中建立异步电机变化负载状态外电路如图5所示,因Simplorer中禁止绕组直接与电压源相连,故在每相绕组的后面分别加上适当的分压电阻 将Maxwell建立的1/4模型导入,输入端口接地,输出端口接旋转系统转动惯量模型 中间需加入机械受力系统变换模块ROTB_ROT将旋转系统转换到机械受力系统 在运行过程中,Simplor er起主动作用,Maxwell起到被动作用 在数据交换过程中时间和步长需要设计合理 ET1,ET2,ET3为三相电压,有效值为311V,相位依次相差120° 将三相定子电阻分为R_A,R_B,R_C和R_A1,R_B1,R_C12部分分别至于感应电机两侧,L_A,L_B,L_C为三相定子侧的漏电感,三相输出连接在一起,至此,线路连接完毕 实验中在0~0.30s电机完成启动并稳定在空载状态;在0 3~0 45s施加50N·m负载转矩,处于负载状态;在0 45s时卸去负载,电机处于空载状态 仿真时间为0 80s 选取两个状态机11模块(STATE_11:State)和2个条件转移模块(TRANS:Transition)模拟变化负载的情况,将状态机里面的动作变量参数作为负载转矩的输入图5 异步电机变化负载电路图输入外部电路的基本参数,模型相同运动工况图6是联合仿真及样机的变化负载参数结果对比图,其中包括定子电流和电机转速 由图可知,实验样机空载转速在120ms之后进入稳态,稳态的转速值为1472rpm,在300~450ms转速降低至1385rpm 由于轴承磨损的存在,造成定、转子相擦,相当于加大了负载,而实际仍满载运行,迫使转速略低于额定转速 在120ms之前启动电流较大,最大的启动电流是额定电流的4 69倍,在300~450ms之间,相电流是空载相电流的1 1倍,450ms以后逐渐恢复到稳定状态 联合仿真模型在0~200ms内电机完成启动过程 200ms之后电机的处于空载状态转速保持稳定1500r/min 在300~400ms施加负载转速变低降到1440r/min,再经过100ms调节过程,最终又趋于稳定 在曲线上利用Math函数,求得稳定状态的有效值8 2A 电机在0 3s左右加入负载后,定子电流增加,并保持稳定状态 450ms时卸去负载,电流开始下降,最终回到空载状态 在300~450ms阶段,电流有效值为16 3A,在450ms之后保持稳定的有效值8 2A 联合模型与实验样机的电流、转速运行特性实测曲线基本相符,有效的验证了联合仿真模型的合理性图6 变化负载的参数曲线图7给出了联合仿真模型变化负载的转矩和铜761内蒙古科技大学学报2020年6月 第39卷第2期损变化曲线 可以看出,起始阶段转矩波动明显,通耗较大,在0.2s后处于稳定空载状态电磁转矩为0N·m,铜耗接近0kW,在300~450ms有负载存在转矩发生振荡变化,铜耗增大,经过100ms调节后,在550ms后系统再次处于空载稳定状态,铜耗又降至0kW图7 变化负载的转矩、铜损曲线电机的联合仿真模型不仅可以分析运动过程的参数波形,还可以观察内部磁场变化情况,图8分别为电机负载状态的磁密分布云图 电机的负载瞬态仿真结果如表3所示,电机在空载运行时,由于轴上无机械负载,电动机空载转速非常接近同步转速 当施加负载后,电机的转速开始下降,电机产生的反电动势减小,定子侧电流增大,磁密增大 空载过程电机磁场的磁密分布一致,导条内磁密分布基本均匀,没有径向增大的趋势,最大磁密接近2 5T 当施加负载后电机的磁密分布发生变化,因感应电流高于稳定时的电流,导致导条磁密分布不再均匀,有沿径向增大的趋势,转子齿根部磁密高于齿端部磁密,在负载运行过程中最大磁密与转速成反比例变化图8 负载状态的磁密云图表3 空载与负载瞬态仿真结果表时间/ms转速/(r·min-1)最大磁密/T30014992.4735014672.5640014462.6245014352.67利用联合仿真模型,将气隙的磁密进行径向分解,得到气隙的空载气隙磁密分布图和变化负载气隙磁密分布图,由图9可以看出,电机在启动过程的气隙磁密变化较剧烈,振幅变化较大 经过200ms调节时间,振幅依然持续的变化,幅度降低 100ms过后,系统愈近稳态,气隙磁密变化均匀 由图10中可以看出,电机在启动过程和变化负载过程的气隙磁密分布变化均较大,振幅震荡剧烈,突加负载的幅值变化比初始启动阶段的幅值变化略低,在500ms过后,系统逐渐趋近于稳态,这个过程的气隙磁密变化较均匀图9 空载气隙磁密分布图图10 变化负载气隙磁密分布图由图11中可知,300ms突加负载瞬间,9次谐波含量最高,11次谐波含量最低 350ms时电机还处于动态运行过程中,9次谐波含量最高,7次谐波861于明星,等:异步电动机在变化负载状态下联合仿真模型的数值计算次之 400ms和450ms的基波幅值含量基本相当,同处于突变负载后接近稳态过程,虽9次谐波含量依然最高,但较300ms和350ms的9次谐波含量要低,基波含量要高,即9次谐波对气隙磁密的影响不能忽视图11 变化负载谐波含量分布图4 总结本文建立了三角形接法7 5kW鼠笼异步电机的联合仿真模型,对求解域和边界条件进行假设,对于次要因素进行了近似处理,忽略了端部效应,定子绕组铁心冲片及机座中心的涡流影响 在Maxwell2D中绘制几何模型,按参考数据选取材料,在定子的外径设定矢量磁位边界条件,将转子设定为运动区域BAND 提出一种定子绕组拆分策略,该策略解决了Simplorer中电压源与定子绕组三角形直接相连错误故障的问题 研究了变化负载瞬态气隙磁密对异步电机的影响,现得出如下结论:(1)利用等效电路和磁路的计算法得知在启动瞬间和施加负载后的瞬间电流、负载转矩振荡变化撤去负载后,经过调整,达到稳定状态 施加负载后的稳态转速比空载时的稳态转速略低 基于磁场的计算方法分析电机内部磁场的分布情况,施加负载后,磁场强度增大,磁场分布发生变化,导条的磁密分布不均匀,齿根部磁密高于齿端部磁密(2)气隙磁密分布波形总体趋向于正弦波形,在启动过程和负载变化过程气隙的磁密的幅值波形变化较大,振动幅度较大;系统在稳态变化过程中的振动幅度减小,波形变化均匀;气隙磁密的奇次谐波对气隙的合成磁密有影响,其中9次的谐波含量较大;在负载变化过程中,瞬态的变化电流引起了气隙磁场的波形畸变,使气隙的谐波含量增加;气隙的谐波磁密对电机的电磁影响非常剧烈,故设计过程中宜采用短距分布绕组,以消弱高次谐波(3)实验分析得知,异步电机的转速和负载的大小成反比例变化 实验样机获得的相电流,转速曲线与联合仿真模型分析的运行特性一致,验证了仿真模型结果的正确性,为电机控制策略的深入研究提供了思路 参考文献:[1] 于明星,焦志刚,辛大志.鼠笼型异步电机断相故障温度场的数值分析与计算[J].沈阳理工大学学报,2017,36(04):28.[2] YUM,ZHUJ,QIANGD,etal.Numericalcalculationofglobaltemperaturefieldduringphasefailureofsmallinductionmotor[C]//2019Chinesecontrolconference.Guangzhou,China:IEEE,2019:7143.[3] ROMEROG,FELEZJ,MAROTOJ,etal.SimulationofanAsynchronousMachinebyusingaPseudoBondGraph[C]//AIPconferenceproceedings.NewYork,USA:2008,1060(1):137.[4] YUM,ZHUJ,YANGL.Short termloadpredictionmodelcombiningFEWandIHSalgorithm[J].ArchivesofElectricalEngineering,2019,68(4):907.[5] NGUYENHP,DEMIRASJ,CHARARAA,etal.Asynchronousmachinerotorspeedestimationusingatabu latednumericalapproach[J].MechanicalSystemsandSignalProcessing,2017,97:84.[6] REGAYACB,FARHANIF,ZAAFOURIA,etal.AnoveladaptivecontrolmethodforinductionmotorbasedonbacksteppingapproachusingdSpaceDS1104controlboard[J].MechanicalSystemsandSignalProcessing,2018,100:466.[7] POPESCUM,MILLERTJE,MCGILPM,etal.Asynchronousperformanceanalysisofasingle phasecapacitor start,capacitor runpermanentmagnetmotor[J].IEEETransactionsonEnergyConversion,2005,20(1):142.[8] KURIHARAK,KUBOTAT,HORIM.Steady stateandtransientperformanceanalysisforasingle phasecapaci tor runpermanent magnetmotorwithskewedrotorslots[J].IEEETransactionsonIndustrialElectronics,2010,57(1):44.[9] 刘伟,吴振奎,张自雷,等.永磁同步电机矢量控制建模与仿真[J].内蒙古科技大学学报,2014,33(04):374.[10] 郝龙,杨金福,唐长亮,等.变负载工况下高速永磁电机转子动力学特性试验研究[J].振动与冲击,2018,37(15):1.961内蒙古科技大学学报2020年6月 第39卷第2期[11] 曹建雄,李正,冯东升.变频电机动态性能试验的负载系统研究[J].电机与控制应用,2017,44(10):110.[12] VASILIJAS,GOCES.Calculationofelectromagneticfieldsinelectricalmachinesusingfiniteelementsmeth od[J].InternationalJournalofEngineeringandIndus tries,2011,2(1):21.[13] YAMAGUCHIT,KAWASEY,YOSHIDAM,etal.3Dfiniteelementanalysisofalinearinductionmotor[J].IEEETransactionsonMagnetics,2001,37(5):3668.[14] DINGW,LIANGDL,CHENGZP.Dynamicmodelandsimulationfora6/4switchedreluctancemachinesystemassistedbymaxwellspiceandsimplorer[C]//MechatronicsandAutomation,2007.ICMA.Haerbin,China:IEEE,2007:1699.[15] ANDRESD,ROGERS,CHRISTIANR,etal.Inductionmotorequivalentcircuitfordynamicsimulation[C]//2009IEEEInternationalElectricMachinesandDrivesConference.Miami,USA:IEEE,2009:858.[16] KLIMAJ,MACHM,VITEKO.Analysisofhighspeedsquirrelcageinductionmotors[C]//EnvironmentandElectricalEngineering.Roman,Italy:IEEE,2015:1302.[17] LABIODC,BAHRIM,SRAIRIK,etal.Staticanddynamicanalysisofnon linearmagneticcharacteristicsinswitchedreluctancemotorsbasedoncircuit coupledtimesteppingfiniteelementmethod[J].InternationalJournalofSystemAssuranceEngineeringandManage ment,2014:1.[18] 于明星.基于Matlab的串并联转换模型的单相线性变压器运行过程模拟[J].内蒙古科技大学学报,2017,36(03):255.[19] YUM,ZHUJ,WANGX.Numericalanalysisoffiniteelementcombinedsimulationmodelforthree phasesquirrel cageinductionmotor[C]//201736thChineseControlConference.Dalian,China:IEEE,2017:10214.[20] 赵鲁.基于Simplorer场路耦合多物理域联合仿真[M].北京:中国水利水电出版社,2014.247.[21] 梁艳萍,刘金鹏,陈晶.大型感应电动机单相短路故障动态力计算[J].中国电机工程学报,2012,32(09):109.[22] 汤蕴趚.电机电磁场的分析与计算[M].北京:机械工业出版社,2010.305.(责任编辑:师宝萍)Numericalcalculationofthevariable loadcombinedsimulationmodelforinductionmotorYUMingxing1,YANGLi2(1.DepartmentofInformationEngineering,ChaoyangTeachersCollege,Chaoyang122000,China;2.SchoolofEquipmentEngineer ing,ShengyangLigongUniversity,Shengyang110159,China)Abstract:TheAnsysfiniteelementsoftwareofhighcomputationalaccuracywasusedtoperformjointsimulationforasynchronousmo torsinordertostudytheelectromagneticcharacteristicsandoperationcharacteristicsofinductionmotors.TheMaxwellfiniteelementmodelof7 5kWasynchronousmotorswasestablished.Themodelwasimportedintosimplorertoestablishthejointsimulationmodel.Thestatemachinefeaturemodulewasusedtosimulatethechangesituationofloadtorque.Basedonmagneticcircuitandequivalentcircuitcalculationmethod,thecurrent,torqueandrotationalspeedofmotorsunderidlingandvaryingloadworkingconditionswerean alyzedandcalculated.Basedonthecalculationmethodofthemagneticfield,twodimensionaltransientalternatingmagneticfieldsolv erswereusedtoanalyzethechangesituationoftransientelectromagneticfieldunderidlingandvaryingloadconditions.Finally,thedistributionofairgapfluxdensitywassolved,andtheharmonicsofairgapfluxdensitywasdecomposed.Thecontentsofharmonicam plitudewereextracted,andtheeffectofharmonicsonmotorswasanalyzed.Thesimulationresultsmayprovidetheoreticalreferencetomotorcontrolstrategies.Keywords:asynchronousmotor;finiteelementanalysis;combinedsimulation;transientfield;harmonicanalysis071。
基于MATLAB的三相鼠笼式交流异步电动机制动仿真
三相鼠笼式交流异步电动机是一种常见的工业电动机,具有结构简单、运行可靠、接线便捷等特点。
为了更好地了解鼠笼式交流异步电动机的制
动过程,可以使用MATLAB软件进行仿真研究。
首先,我们需要建立鼠笼式交流异步电动机的数学模型。
这个模型是
基于电动机的物理特性和电路等参数建立的,可以描述电动机的运行情况。
通常,鼠笼式交流异步电动机的数学模型可以分为电磁部分和机械部分两
部分。
在电磁部分,我们可以利用磁动势方程描述电动机的电磁特性。
首先,我们可以根据电动机的电路参数计算出定子电压、电流和电动势等相关参数。
然后,根据电动势方程,我们可以计算出电动机的磁链和电磁转矩。
在机械部分,我们可以利用转矩方程描述电动机的机械特性。
根据载
荷特性和电动机的转速、转矩、惯性等参数,我们可以计算出电动机的机
械转矩和转速。
在建立了鼠笼式交流异步电动机的数学模型之后,我们可以使用MATLAB软件进行仿真研究。
根据实际需求,我们可以设置不同的仿真条
件和参数,如电机参数、工作状态、负载特性等。
然后,我们可以运行仿
真程序,得到电动机在不同工况下的运行情况和性能指标。
通过仿真研究,我们可以得到电动机的速度-转矩特性曲线、电流-转
矩特性曲线、功率-转矩特性曲线等数据,从而更好地理解电动机的工作
原理和性能。
总之,基于MATLAB的三相鼠笼式交流异步电动机制动仿真可以帮助研究人员深入了解电动机的运行特性和性能,提供了一种快捷有效的研究方法。
同时,这种仿真方法也可以用于电动机的设计优化和性能改进。
maxwell电机仿真实例Maxwell电机仿真是电机设计领域中的重要工具,它可以帮助工程师进行快速、准确的设计评估和性能优化。
本文将介绍Maxwell电机仿真的基本原理、应用场景以及相关技术细节,以及一些实际的仿真实例。
一、Maxwell电机仿真的基本原理Maxwell是由ANSYS公司开发的一款专业的电机仿真软件,它基于有限元原理,利用Maxwell方程和磁场有限元方法对电机的电磁场进行建模和仿真。
其基本原理是通过使用合适的数学模型和计算方法,可以快速、准确地分析电机的电磁场分布、磁场强度、磁场分布等物理量,从而为电机的设计和优化提供有力的支持。
二、Maxwell电机仿真的应用场景Maxwell电机仿真广泛应用于各种类型的电机设计和分析中,包括直流电机、异步电机、同步电机等。
在电机设计初期,Maxwell仿真可以帮助工程师进行电机的初步设计和评估,包括确定电机的尺寸、形状、磁路结构、线圈布置等设计参数。
在电机的中期设计阶段,Maxwell仿真可以帮助工程师进行电机的性能优化和参数调整,以提高电机的效率、输出功率、功率因数等性能指标。
在电机的最终验证和调试阶段,Maxwell仿真可以帮助工程师对电机的性能进行验证和分析,同时可以帮助解决电机设计中遇到的一些难题和技术难点。
三、Maxwell电机仿真的技术细节Maxwell电机仿真的核心技术包括:建模技术、网格划分技术、求解技术等。
对于电机的建模,一般可以采用几何建模法或者参数化建模法,然后使用合适的网格划分技术对电机进行网格划分,最终采用合适的求解器对电机的电磁场进行求解和分析。
在进行Maxwell电机仿真时,需要注意一些技术细节,如对材料特性的准确建模,对边界条件的合理设置,以及对求解器参数的调整等。
四、Maxwell电机仿真实例下面将通过一个实际的Maxwell电机仿真实例来展示Maxwell电机仿真的过程和结果。
假设我们需要设计一个直流电机,其额定功率为200W,额定转速为3000rpm,电机的尺寸为直径100mm、长度120mm。
《基于MATLAB的三相异步电动机的建模与仿真研究》工作特性,然后对基于基于MATLAB的三相异步电动机的建模与仿真进行了重点分析,以供广大读者参考。
【关键词】MATLAB 三相异步电动机建模仿真1 MATLAB简介MATLAB是矩阵实验室(Matrix Laboratory)的简称,可以为三相异步电动机提供数值计算能力、专业水平的符号计算功能、可视化建模和仿真等功能。
矩阵是MATLAB的基本数据单位,其指令表达形式类似于数学和工程中用到的,所以相比较C语言而言,MATLAB的结算问题能力更便捷。
目前的MATLAB包含了数百种以上的内部函数主包和三十多种工具包,后者又可以分为学科工具包和功能性工具包,从而实现处理可视化建模仿真、实时控制、文字处理等各项功能。
MATLAB还有着很强的开放性,其内部的主包和工具包都属于可读可修改文件,从而方便用户将源程序的修改加入到自己编写的程序中。
2 异步电动机基本原理和工作特性三相异步电动机主要由定子和转子构成,二者之间有一个比较小的空气隙。
当对称三相绕组接到对称三相电源以后,空气隙就可以建立同步转速和旋转磁场。
旋转磁场会切割转子导体,而后者就会产生感应电势,再加上转子绕组属于闭合状态,所以电流会从转子导体中通过。
电流和旋转磁场之间会产生电磁力,并作用于转子导体,其方向与旋转磁场方向保持一致。
异步电动机工作特性是指在额定电压和额定频率的情况下,电动机转速、定子电流、功率因数、电磁转矩等方面的关系。
首先从转速特性方面来看,在空载状态下,转子电流接近零,所以处于同步转速状态下,而随着负载的增加,转速会逐渐下降,因此转速特征是一条稍向下倾斜的曲线。
其次从定子电流特性方面来分析,如果处于空载状态下,定子电流就全部是励磁电流;并且随着负载的增加,定子电流也会增加。
最后从功率因数特性的方面来看,异步电动机的功率因数处于滞后状态,如果处于空载情况下,电动机的功能因素就比较低;随着负载的增加,电动机的功率因数也会提高,直到额定负载状态下会达到最大值。
maxwell电机仿真实例Maxwell电机仿真是指利用Maxwell软件对电机的设计和性能进行仿真分析的过程。
Maxwell软件是一款电磁场仿真软件,它可以帮助工程师们设计和分析各种类型的电机,包括直流电机、异步电机、同步电机等。
在这篇文章中,我们将介绍Maxwell电机仿真的基本原理和步骤,并通过一个实例来演示如何利用Maxwell进行电机仿真。
Maxwell电机仿真的基本原理Maxwell电机仿真的基本原理是利用有限元分析方法对电机进行建模和分析。
有限元分析是一种常用的数值分析方法,它通过将复杂结构分割为许多小的有限元单元,利用数值计算方法对每个有限元单元进行分析,最终得到整个结构的性能和行为。
在Maxwell电机仿真中,首先需要对电机进行建模,然后利用有限元分析方法对电机进行电磁场分析、热分析和结构分析等,最终得到电机的性能和行为。
Maxwell电机仿真的步骤Maxwell电机仿真的步骤包括建模、网格划分、设置仿真参数、进行仿真分析等。
下面我们将详细介绍每个步骤。
第一步:建模建模是Maxwell电机仿真的第一步,它包括几何建模和物理建模两个方面。
几何建模是指对电机进行三维几何建模,包括定子、转子、绕组、磁路等。
在Maxwell软件中,可以利用建模工具对电机进行几何建模,也可以导入CAD文件进行几何建模。
物理建模是指对电机的物理特性进行建模,包括电磁特性、热特性、结构特性等。
在Maxwell 软件中,可以利用物理建模工具对电机的物理特性进行建模。
第二步:网格划分网格划分是对电机进行有限元网格划分的过程,它将电机的几何模型划分为许多小的有限元单元,并建立有限元网格。
在Maxwell软件中,可以利用网格划分工具对电机进行有限元网格划分。
第三步:设置仿真参数设置仿真参数是对电机进行仿真参数的设置,包括电场分析参数、热分析参数、结构分析参数等。
在Maxwell软件中,可以通过设置仿真参数工具对电机的仿真参数进行设置。
城轨车辆用异步牵引电机的发热与散热分析近年来,随着城市轨道交通的飞速发展,城轨车辆的牵引电机发热与散热问题日益凸显。
为了保证城轨车辆的安全运行和提高牵引电机的使用寿命,对其发热与散热特性进行分析与优化是至关重要的。
一、城轨车辆异步牵引电机的工作原理城轨车辆异步牵引电机是一种常见的电动机,其工作原理基于电磁感应。
电机通过电网供电,电网提供的电流经过电机的定子线圈,产生旋转磁场。
而牵引电机的转子线圈由转速传感器控制,因此可以产生旋转力,驱动车辆运行。
二、异步牵引电机的发热原因发热是城轨车辆异步牵引电机普遍存在的问题之一。
其主要原因如下:1. 电流损耗:电机在工作时,不可避免地会产生电流损耗,这是由电阻引起的。
电流通过定子线圈和转子线圈时,会产生一定电阻和电阻损耗,从而导致发热。
2. 铁损耗:城轨车辆异步牵引电机中的铁芯也会因为磁通的周期性变化而产生剩余磁化和磁暂态,从而引起铁损耗。
铁损耗主要表现为涡流损耗和剩余磁余。
3. 功率损耗:城轨车辆异步牵引电机在传动过程中,会产生摩擦和机械损耗,使得一部分传动能量转化为热能。
三、异步牵引电机的散热方式城轨车辆异步牵引电机的散热方式通常有自然散热、强制风冷和液冷等。
1. 自然散热:自然散热是指通过散热器和散热片等被动器件将发热产生的热量传导到周围空气中。
散热器一般是金属制成,具有较好的散热性能。
电机工作时,产生的热量通过散热器和散热片传导到散热器表面,再通过与周围空气的对流传热散热。
自然散热的优点是简单、可靠,但受限于空气自然对流,散热效果有限。
2. 强制风冷:强制风冷是指通过电机内部的风扇进行散热。
风扇通过强制对流使得电机内部的热量迅速传递到风扇下游,并将热量带走。
风扇进风口吸入周围空气,经过电机的散热器后形成热风,冷却电机。
相比于自然散热,强制风冷能更有效地提高热量传输速度,更适用于功率较大的电机。
3. 液冷:液冷是指通过冷却剂(如水)对电机进行散热。
液冷散热的主要原理是通过将电机内部产生的热量传递给冷却剂,再通过冷却剂的流动带走热量。
异步电动机温度场仿真分析摘要随着电气化和自动化程度的不断提高,异步电动机将占有越来越重要的地位。
而随着电力电子技术的不断发展,由异步电动机构成的电力拖动系统也将得到越来越广泛的应用。
异步电动机与其它类型电机相比,之所以能得到广泛的应用是因为它具有结构简单、制造容易、运行可靠、效率较高、成本较低和坚固耐用等优点。
电机是各个行业生产过程及日常生活中普遍使用的基础设备,它是进行电能量和机械能量转换的主要器件。
它在现代工业、现代农业、现代国防、交通运输、科学技术、信息传输和日常生活中都得到最广泛的应用。
本文以异步电动机为研究对象,对电机内温度场进行耦合分析。
根据传热学理论,首先建立了电机二维温度场的模型,其次建立了电机转子部分三维温度场的模型,给出了电机损耗及散热系数的计算方法。
应用有限元软件ANSYS进行计算分析。
最后分析了转差率变化对电机温度场分布的影响,以及有效的散热方法,得出了一些有益的结论。
关键词:温度场;异步电动机;有限元法;ANSYSABSTRACTWith the electrification and automation of continuous improvement, asynchronous motor will occupy an increasingly important position.With the continuous development of power electronics technology, the electric drive system constituted by the induction motor will also be more widely used. Compared with other types of asynchronous motor motor, is able to be widely used because it has a simple structure, easy to manufacture, reliable operation, high efficiency, low cost and durability advantages.Motor is the basis of the production process and equipment industries commonly used in daily life, it is carried out major components of electric energy and mechanical energy conversion.It is in the modern industry,modern agriculture,modern defense,transportation,science and technology,information transmission and daily life have been the most widely used.In this paper, asynchronous motor for the study of the temperature field in the motor coupling analysis.Based on heat transfer theory,first established the two-dimensional temperature field model of the motor,followed by the establishment of a three-dimensional model of the rotor section temperature field, the calculation method of the motor and the heat loss coefficient.Finite element analysis software ANSYS calculation.Finally,analysis of the impact of changes in the slip of the motor temperature distribution,as well as effective cooling method, draw some useful conclusions.Keywords:temperature field;asynchronous motor;finite element method; ANSYS第一章绪论1.1 选题的背景异步电动机又称感应电动机,是由气隙旋转磁场与转子绕组感应电流相互作用产生电磁转矩,从而实现机电能量转换为机械能量的一种交流电动机。
异步电动机是各类电动机中应用最广、需要量最大的一种。
在中国,异步电动机的用电量约占总负荷的60%多[1]。
异步电动机还容易按不同环境条件的要求,派生出各种系列产品。
它还具有接近恒速的负载特性,能满足大多数工农业生产机械拖动的要求。
其局限性是,它的转速与其旋转磁场的同步转速有固定的转差率(见异步电机),因而调速性能较差,在要求有较宽广的平滑调速范围的使用场合(如传动轧机、卷扬机、大型机床等),不如直流电动机经济、方便。
此外,异步电动机运行时,从电力系统吸取无功功率以励磁,这会导致电力系统的功率因数变坏。
因此,在大功率、低转速场合(如拖动球磨机、压缩机等)不如用同步电动机合理[2]。
异步电动机的种类很多,从不同的角度有不同的分类法。
按定子相数分有单相异步电动机、三相异步电动机;按转子绕组形式,一般可分为绕线式和鼠笼式两种类型。
鼠笼式异步电动机中,又有单鼠笼、双鼠笼和深槽式之分;按电机尺寸或功率,分为大型、中型、小型和小功率电机;按电机的防护形式分为开启式、防护式、封闭式[3]。
异步电机主要用作电动机,其功率范围从几瓦到上万千瓦,是国民经济各行业和人们日常生活中应用最广泛的电动机,为多种机械设备和家用电器提供动力。
例如机床、中小型轧钢设备、风机、水泵、轻工机械、冶金和矿山机械等,大都采用三相异步电动机拖动;电风扇、洗衣机、电冰箱、空调器等家用电器中则广泛使用单相异步电动机。
异步电机也可作为发电机,用于风力发电厂和小型水电站等。
1.2 国内外研究现状目前国内外很多学者对电机内电磁场、温度场、耦合场以及影响电磁场和温度场的某些因素进行了大量的研究工作。
国际上Alonso等学者分析了谐波对电机温升的影响[4]。
Austin H.Bonnett.等学者发表文章对运行温度和性能作了深入的研究[5]。
M.Shanel等学者对电机的冷却系统内的流体的特性加以分析[6]。
E.Gurevich对发电机的转子温度场[7],R,Krok对发电机在负载不对称情况下的转子温度场进行了计算[8]。
A.Di Gerlando对大型异步电动机的定子绕组的温度场进行了计算[9]。
R.Krok对发电机运行时的故障诊断进行了研究[10]。
国内学者汤蕴璆、孟大伟用有限元法对水轮发电机定子最热段三维温度场进行了计算[11]。
魏永田对转子部分的温度场进行了研究[12]。
李德基对大型发电机定子绕组槽部温度场和汽轮发电机直接氢冷转子三维温度场进行了计算[13]。
胡敏强等学者采用圆柱坐标系下六面体有限元方法计算了异步电机定子铁芯的温度场[14]。
颜威利,方日杰等学者分别用有限元法和热网络法对电磁铁三维稳态温度场和异步电动机定子温度场进行了计算[15][16]。
许承千等运用稳定导热问题的有限差分法分析电机的三维温度场计算[17],李伟力等基于流体相似理论和三维有限元法计算大中型异步电动机的定子三维温度场及采用六面体、八节点有限元方法对大型同步发电机定、转子和端部的温度场的计算也有一些研究工作[18][19][20]。
目前,国内外的学者对于大型异步电动机的温度场的研究作了很多工作,但对于高转差率异步电动机的温度场的研究工作还不多,这方面的文献也不常见。
但是工业的迅速发展,对异步电动机的运行安全性提出了更高的要求。
1.3 选题的意义随着电机制造业的发展,电机的单机容量以及各项技术指标不断增加,电机的电磁负荷及热负荷也随之提高,进而引起电机各部分温度升高,这直接影响电机的使用寿命和运行的安全可靠性,所以对现代电机的发热与冷却问题进行研究显得日益重要。
在异步电动机的设计阶段,只有初步计算和确定样机的温度分布和电机相关要求部件得平均温升,才能较好地对电机各项性能指标、技术要求和材料消耗等方面进行合理的分配及调整,进而使设计方案更合理,避免在试制过程中因温升的原因而造成研发的失败和费用的提高。
所以,准确的计算电机内温度的分布,对异步电动机的设计有十分重要的指导作用。
异步电动机转差率的升高会引起铸铝转子的铝耗增加,再加上转子旋转的作用,使得冷却气体在定转子之间、或在转子和定子通风槽内的流动形态变得更加复杂,因此电机的发热和冷却温度的研究涉及到流体力学、传热学、电磁场理论和计算方法等多种学科及领域。
解决电机发热与冷却问题,需要进行大量的工作和深入的研究。
本文根据传热学、有限元理论,从损耗的角度对异步电动机的温度场进行耦合分析,分别建立了电机二维温度场、转子三维温度场的数学模型和物理模型,应用有限元分析软件ANSYS进行了仿真计算,并分析了特殊位置的温度值,找出了电机内的最高发热点。
最后还分析了转子不同转速下电机温度场分布的影响。
不仅对异步电动机的设计和安全运行具有重大的意义,而且具有可观的工程意义。
第二章传热学原理2.1 传热学的基本定律和导热微分方程温度场是各时刻物体中各点温度分布的总称。
温度场是空间坐标和时间的函数,在直角坐标系下可表示为[21]:(2-1) τ式中,T——温度k;x,y,z——空间的坐标;——时间s。
式(2-1)表示物体的温度在三个方向上均发生变化的三维非稳念温度场,如果温度不随时间变化,则为三维稳态温度场,这时(2-2) 按傅立叶导热定律,物体内单位时间内通过单位面积所传递的热量与物体内的温度梯度成正比:(2-3)式中,——热流密度向量(简称热流相量),在直角坐标系下热流相量可以表示为:(2-4) λ——物体的导热系数。
直角坐标系下傅里叶导热定律为:(2-5) 式中,λx,λy,λz——分别为x,y,z方向上的导热系数。
对于各向同性材料,λx=λy=λz=λ,故(2-4)式可以改写为(2-6) 从式(2-6)可以看出,傅立叶定律描述了热流密度、温度梯度和导热系数之间的关系,它是导热现象的基本定律。
考虑如图2-1所示直角坐标系中导热物体内部的任意一个微元体,dV=dx□dy□dz,微元体的三个边长dx、dy、dz分别平行于x轴、y轴、z轴。