摆线针轮减速器的设计答辩 ppt课件
- 格式:pptx
- 大小:7.07 MB
- 文档页数:39
摆线针轮减速机原理演示图及结构,维护等所有知识1.它的原理像两个银币,一个静止另一个靠在它的边上转,当转动的币从一个点转回原来的点时它已经转了两转不是一转。
2.示意图不好画,我讲解一下。
它里面是齿轮组成的,动静齿轮的结合不是像银币那样外边接合。
而是一个外边和另一个内边啮合构成一组,这样可以节省空间,即使多组结合也可以叠在一个圆筒内。
圆筒的输入和输出轴是在同一个圆心上的,但是内部的齿轮并不同心,主动轮比从动轮小沿轴摆动,同时沿边滚动。
带动从动轮滚动;从动轮又带动下一主动轮沿轴摆动···如此直到输出轴。
每组齿数和齿轮组数决定变速比。
3。
日常只要保证机油的正常就可以了。
4. 容易发生密封圈漏油现象,换密封圈就好了。
换时只要拆电机螺丝,不要拆减速机螺丝。
拆完再拆电机风叶罩。
转动风叶同时拔出电机。
换好后装电机时也要转动风叶。
还有油泵也容易出问题。
透明油管容易漏油。
拆解减速机时一定要记住每个齿轮的方向标记,以便装回。
行星齿轮减速机:主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点.因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量.减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度.关于行星减速机的几个概念:级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙.行星摆线针轮减速机:全部传动装置可分为三部分:输入部分、减速部分、输出部分。
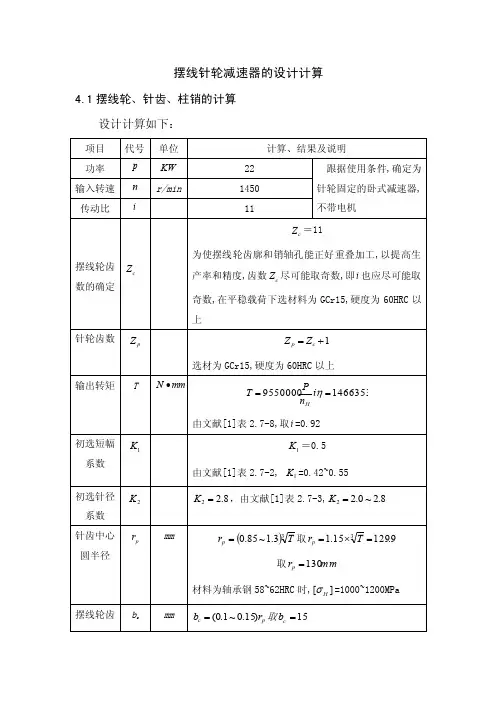
摆线针轮减速器的设计计算4.1摆线轮、针齿、柱销的计算
设计计算如下:
4.2 输出轴的计算结构图如图4-1,
图4-1 输出轴结构装配图设计计算如下:
由前面的轴的结构知, 1F 、211169881081698854F F F ì+=ïïíï? ïî受力中心距离为116mm ,2F 、3F 受力中心距离为50mm,因
1F =5600N ,故
2325600116166(5600)F F F ì+=ïïí
ï? ïî
得2F =8014N , 3F =2414N 。
进行校核时,通常只校核轴上承受最大弯矩和扭矩的
4.3输入轴的计算
其结构装配图如图4-2
图4-2 输入轴结构装配图
由前面知, r F 作用点到1F 、2F 作用点的距离相等,都为54mm ,
211169881081698854
F F F ì+=ïïíï? ïî 得,1F =8494N ,2F =8494N 。
进行校核时,通常只校核轴上承受最大弯矩和扭
4.4 其它零件的设计
其它零件的设计见草图,在此不作说明。
4.5 润滑与密封
本减速机采用油浴润滑,润滑油选择中极齿轮油。
若在低温或高温环境以及在启动频烦的场合,须跟据情况重新选择适宜润滑油。
对于本减速器,在严重恶劣负荷条件中工作时,推荐采用双曲线齿轮油。
密封件选择J型无骨架油封。
针齿壳上开有沟槽,油浸深度为20~40mm。
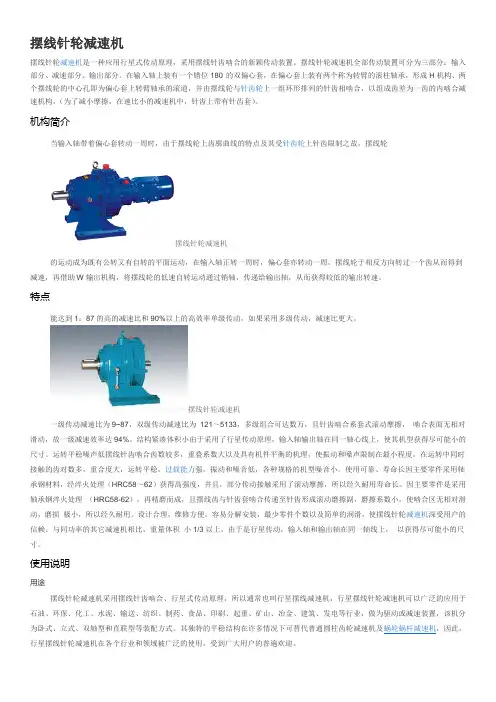
摆线针轮减速机摆线针轮减速机是一种应用行星式传动原理,采用摆线针齿啮合的新颖传动装置。
摆线针轮减速机全部传动装置可分为三部分:输入部分、减速部分、输出部分。
在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个称为转臂的滚柱轴承,形成H机构、两个摆线轮的中心孔即为偏心套上转臂轴承的滚道,并由摆线轮与针齿轮上一组环形排列的针齿相啮合,以组成齿差为一齿的内啮合减速机构,(为了减小摩擦,在速比小的减速机中,针齿上带有针齿套)。
机构简介当输入轴带着偏心套转动一周时,由于摆线轮上齿廓曲线的特点及其受针齿轮上针齿限制之故,摆线轮摆线针轮减速机的运动成为既有公转又有自转的平面运动,在输入轴正转一周时,偏心套亦转动一周,摆线轮于相反方向转过一个齿从而得到减速,再借助W输出机构,将摆线轮的低速自转运动通过销轴,传递给输出轴,从而获得较低的输出转速。
特点能达到1:87的高的减速比和90%以上的高效率单级传动,如果采用多级传动,减速比更大。
摆线针轮减速机一级传动减速比为9~87,双级传动减速比为121~5133,多级组合可达数万,且针齿啮合系套式滚动摩擦,啮合表面无相对滑动,故一级减速效率达94%。
结构紧凑体积小由于采用了行星传动原理,输入轴输出轴在同一轴心线上,使其机型获得尽可能小的尺寸。
运转平稳噪声低摆线针齿啮合齿数较多,重叠系数大以及具有机件平衡的机理,使振动和嗓声限制在最小程度。
在运转中同时接触的齿对数多,重合度大,运转平稳,过载能力强,振动和噪音低,各种规格的机型噪音小。
使用可靠、寿命长因主要零件采用轴承钢材料,经淬火处理(HRC58~62)获得高强度,并且,部分传动接触采用了滚动摩擦,所以经久耐用寿命长。
因主要零件是采用轴承钢淬火处理(HRC58-62),再精磨而成,且摆线齿与针齿套啮合传递至针齿形成滚动磨擦副,磨擦系数小,使啮合区无相对滑动,磨损极小,所以经久耐用。
设计合理,维修方便,容易分解安装,最少零件个数以及简单的润滑,使摆线针轮减速机深受用户的信赖。
摆线针轮减速机原理图摆线针轮减速机原理图、结构图、性能及型号表示法摆线针轮减速机原理/摆线减速机结构原理行星摆线针轮减速机全部传动装置可分为三部分:输入部分、减速部分、输出部分。
在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个滚柱轴承,形成H机构,两个摆线轮的中心孔即为偏心套上转臂轴承的滚道,并由摆线轮与针齿轮上一组环形排列的针齿轮相啮合,以组成少齿差内啮合减速机构,(为了减少摩擦,在速比小的减速机中,针齿上带有针齿套)。
当输入轴带着偏心套转动一周时,由于摆线轮上齿廊曲线的特点及其受针齿轮上针齿限制之故,摆线轮的运动成为即有公转又有自转的平面运动,在输入轴正转一周时,偏心套亦转动一周,摆线轮于相反方向上转过一个齿差从而得到减速,再借助W输出机构,将摆线轮的低速自转运动通过销轴,传递给输出轴,从而获得较低的输出转速。
武英牌摆线减速机原理/行星摆线针轮减速机结构、参数、性能及表示法一、行星摆线针轮减速机/摆线减速机是一种比较新型的传动机构,其独特的平稳结构在许多情况下可替代普通圆柱齿轮减速机及蜗轮蜗杆减速机,因为摆线针轮减速机具有:1、传动比大:摆线针轮减速机一级减速时传动比为1:7到1:87;两级减速时转动比为121~7569,用户也可以根据自己的实际需要选用减速比更大的三级减速!2、传动效率高:摆线针轮减速机由于该机啮合部位采用了滚动啮合,一般效率为可达90%以上。
3、保养方便(润滑方式):#6125以下使用不要保养的専用高级油脂;4、体积小,重量轻:摆线针轮减速机采用行星传动原理,输入轴和输出轴在同一轴线上而且有与电动机直联呈一体的独特之处,因而摆线针轮减速机本身具有结构紧凑,体积小、重量轻的特点。
用它代替两级普通圆柱齿轮减速器,体积可减少1/2~2/3;重量约减轻1/3~1/2。
5、拆装方便,容易维修:由于摆线针轮减速机结构设计合理、拆装简单便于维修,使用零件个数少以及润滑简单。

1.它的原理像两个银币,一个静止另一个靠在它的边上转,当转动的币从一个点转回原来的点时它已经转了两转不是一转。
2.示意图不好画,我讲解一下。
它里面是齿轮组成的,动静齿轮的结合不是像银币那样外边接合。
而是一个外边和另一个内边啮合构成一组,这样可以节省空间,即使多组结合也可以叠在一个圆筒内。
圆筒的输入和输出轴是在同一个圆心上的,但是内部的齿轮并不同心,主动轮比从动轮小沿轴摆动,同时沿边滚动。
带动从动轮滚动;从动轮又带动下一主动轮沿轴摆动···如此直到输出轴。
每组齿数和齿轮组数决定变速比。
3。
日常只要保证机油的正常就可以了。
4. 容易发生密封圈漏油现象,换密封圈就好了。
换时只要拆电机螺丝,不要拆减速机螺丝。
拆完再拆电机风叶罩。
转动风叶同时拔出电机。
换好后装电机时也要转动风叶。
还有油泵也容易出问题。
透明油管容易漏油。
拆解减速机时一定要记住每个齿轮的方向标记,以便装回。
5.适用垂直安装的任何机械。
如搅拌桨,耙泥机。
摆线针轮减速机原理图、结构图、性能及型号表示法摆线针轮减速机原理/摆线减速机结构原理行星摆线针轮减速机全部传动装置可分为三部分:输入部分、减速部分、输出部分。
在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个滚柱轴承,形成H机构,两个摆线轮的中心孔即为偏心套上转臂轴承的滚道,并由摆线轮与针齿轮上一组环形排列的针齿轮相啮合,以组成少齿差内啮合减速机构,(为了减少摩擦,在速比小的减速机中,针齿上带有针齿套)。
当输入轴带着偏心套转动一周时,由于摆线轮上齿廊曲线的特点及其受针齿轮上针齿限制之故,摆线轮的运动成为即有公转又有自转的平面运动,在输入轴正转一周时,偏心套亦转动一周,摆线轮于相反方向上转过一个齿差从而得到减速,再借助W输出机构,将摆线轮的低速自转运动通过销轴,传递给输出轴,从而获得较低的输出转速。
武英牌摆线减速机原理/行星摆线针轮减速机结构、参数、性能及表示法一、行星摆线针轮减速机/摆线减速机是一种比较新型的传动机构,其独特的平稳结构在许多情况下可替代普通圆柱齿轮减速机及蜗轮蜗杆减速机,因为摆线针轮减速机具有:1、传动比大:摆线针轮减速机一级减速时传动比为1:7到1:87;两级减速时转动比为121~7569,用户也可以根据自己的实际需要选用减速比更大的三级减速!2、传动效率高:摆线针轮减速机由于该机啮合部位采用了滚动啮合,一般效率为可达90%以上。
![毕业设计(论文)--摆线针轮减速器的设计[管理资料]](https://uimg.taocdn.com/cd7c4d2184254b35effd3467.webp)
工业机器人专用减速器作为重要的机械传动部件具有体积小、重量轻、传动效率高等特点。
本设计全面考虑到运转平稳、多齿啮合、轮齿均载等运动学和动力学的要求,从而实现承载能力高、传递效率高、可靠性高和动力学性能优良等指标,并且要便于制造、装配和检修,设计了具有合理结构的工业机器人专用减速器即摆线针轮行星减速器。
本论文所涉及的科研项目主要通过对摆线针轮行星减速器的主要零件的概念进行详细阐述,给出了摆线针轮减速器的用途,使用说明以及注意事项。
列出了摆线针轮行星减速机的构造即输出部分,输入部分。
通过对针摆行星传动减速器传动工作原理和特点进行分析,对针轮输出机构及针摆行星传动这种传动方式进行分析,以获得其理论设计和方法。
从摆线针轮行星传动的共同点出发以及针摆轮行星减速器相对于少齿差行星减速器的优点提出针摆行星传动形式的设计计算方法。
本论文主要从以下方面出发对摆线针轮行星传动进行了研究:参照传统针摆行星传动基本设计计算方法以及对摆线针轮行星传动主要零部件的基本参数设计计算,并对摆线轮、柱销,针轮进行受力分析最终计算出转臂轴承和各支撑轴承所能承受的载荷大小,完成包括摆线轮、柱销等主要零件强度校核计算和轴承的寿命计算,给出主要零件机械加工的工艺过程,然后利用CAD画出了主要零件的草图和最后的装配图。
关键词:摆线传动;摆线轮;受力分析The cycloid—gear reducer is one of the most important transmission components of the pumping unit by its smaller volume,lighter weight and effective transmission. In order to realize four targets which include high transmission efficiency, high reliability and the excellent dynamics performance and guarantee credible lubricate ability, receive high efficiency of transmission, and make it easy for manufacture, assembly and inspection, we thought over all the requests in the round and design the rational structure cycloid—gear reducer.By analyzing characteristics and working principle of cycloid drive, and the output pin wheel cycloid drive’s working pr inciple, we obtion the design theory and method of this new kind of reduce. This paper mainly complete works include that provide the design method and complete the prototype design and dynamics analysis of virtual prototype.This paper researches the following aspects of the output pin wheel cycloid drive. First, the basic parameters and dimensions of main parts of the output pin wheel cycloid drive are designed referring to design and calculation methods of the traditional cycloid drive, and mechanical analysis of the transmission system and the load condition and life of rotary arm bearings and steady bearings of each shafts are calculated, and at the same time the calculations including the strength of cycloid wheel, pins and other major parts are completes. Then, using CAD to draw sketches of the main components and final assembly drawing.Keywords:Planet—cycloid Reducer; Cycloid ;force analysis目录摘要 (III)Abstract ......................................................................................................................................... I V 目录.. (V)1 绪论 (1)1.1 课题研究的背景和依据 (1)1.2 本课题的研究意义 (1)1.3 课题国内外研究现状及发展趋势 (1)2 摆线针轮行星传动的简介 (4)2.1摆线针轮的概念 (4)2.2 摆线针轮减速机的用途,使用说明和注意事项 (4)2.2.1 用途 (4)2.2.2 使用条件 (4)2.2.3 润滑 (4)2.2.4 安装 (5)2.3 摆线针轮行星减速器的构造 (5)2.4 齿廓曲线的形成及其啮合原理 (6)2.5 摆线针轮行星传动的特点及应用 (8)3工业机器人的总体设计 (9)3.1工业机器人的组成 (9)3.1.1 工业机器人的系统组成 (9)3.1.2 工业机器人的基本机能组成 (9)3.2 机器人的结构分析 (9)3.2.1 机器人的总体结构的概念 (9)3.2.2机器人的传动结构 (10)3.3机器人的设计分析及总体方案的确定 (11)3.3.1 设计的任务要求 (11)3.3.2总体方案的确定 (12)3.3.3 工业机器人的主要技术参数 (12)4 摆线针轮行星齿轮传动的传动比计算和传动特点 (12)4.1摆线针轮行星齿轮传动的传动比计算 (13)4.2啮合的齿廓形成原理 (14)5 摆线针轮行星齿轮传动设计 (15)5.1针轮行星轮系的材料 (15)5.2 第一套摆线针轮加速器的设计 (15)5.2.1 选择结构形式,齿数及材料 (15)5.2.2 强度计算针齿中心圆半径 (15)5.2.3计算摆线轮和针轮的几何尺寸 (16)5.2.4 转臂轴承的选择计算 (17)5.2.5 针齿销弯曲强度计算 (18)5.2.6 W输出机构销轴弯曲强度计算 (19)5.3 第二套摆线针轮减速器的设计 (20)5.3.1 选择结构形式,齿数及材料 (20)5.3.2 接触强度计算针齿中心圆半径 (20)5.3.3 计算摆线轮和针轮的几何尺寸 (20)5.3.4 转臂轴承的选择计算 (21)5.3.5 针齿销弯曲强度计算 (22)5.3.6 W输出机构销轴弯曲强度计算 (22)6行星齿轮传动输出轴的轴承选择 (24)7 主要零件的机械加工工艺规程 (25)7.1 摆线轮的加工工艺路线 (25)7.2 针齿壳的加工工艺路线 (26)7.3 输出轴加工工艺 (26)7.4 偏心套加工工艺 (27)8结论与展望 (29)8.1 结论 (29)8.2 展望 (29)致谢.............................................................................................................................................. .30 参考文献 (31)1 绪论1.1课题研究的背景和依据减速器是连接动力机部分和工作机部分的应用最为广泛的通用传动机械,行星齿轮减速器对齿轮的齿廓曲线的主要要求是保证瞬时传动比是常数。
摘要摘要:本次设计的是摆线针轮行星减速器,摆线针轮行星传动具有传动比范围大,体积小、重量轻,效率高,运转平稳、噪声低,工作可靠、寿命长的特点。
因此,摆线针轮行星齿轮传动现已广泛地应用于工程机械、矿山机械、冶金机械、起重运输机械、轻工机械、石油化工机械、机床、机器人、汽车、坦克、火炮、飞机、轮船、仪器和仪表等各个方面。
文中从对齿轮减速器的发展的历史研究开始,再对传动比进行计算,而后分别进行齿数计算、齿形分析、效率计算、强度验算、结构设计、绘制减速器装配图及零件图。
最后对行星齿轮的结构设计进行了较详细的阐述。
通过对摆线针轮行星减速器的研究,结合目前的发展情况和所要面临解决的问题,设计出具有上述一系列优点的减速机构。
在设计中,摆线针轮行星传动的薄弱环节是转臂轴承,因转臂轴承在受力大,转速也较高的情况下工作(其内、外圈的相对转速等于输入轴与输出轴二者转速绝对值之和),所以在新系列中为保证转臂轴承的寿命,往往采用加强型的滚子轴承。
关键词:摆线针轮行星减速器;齿轮;行星齿轮减速器;齿轮啮合;滚子轴承。
AbstractAbstract:This design is pin-cycloidal gear planetary .Pin-cycloidal gear planetary gear transmission range is big, small volume, light weight, high efficiency, stable operation,low noise,long life and reliable , Therefore, the planetary gear transmission has been widely used in engineering machinery, mining machinery, metallurgy, machinery, lifting transportation machinery, light industrial machinery, petroleum, chemical machinery, machine tools, robots, automobile, tanks, artillery and aircraft, ships, instrument and meter, etc. Based on the development of gear reducer, "the study of history to start again, then calculated the transmission separately gear tooth profile analysis and calculation, the calculation efficiency, strength calculation, the structure design, drawing assembly and detail drawings. Finally the structure design of planetary gears are expounded in detail. Through the cycloid planetary reducer, combining the current development situation and to solve the problem, the design has the advantages of a slowdown. In the design of cycloid planetary gear, the weak link is turning arm bearing, because in turn arm bearing force, high speed and under the condition of inner work (the relative speed equals input shaft and the output shaft rotational sum between absolute). so that a new series in turn for the life, often arm bearing reinforced by the roller bearings.Key words: Pin-cycloidal gear planetary reducer; gear; planetary gear reducer; gears meshing; roller bearings目录摘要 (I)Abstract ........................................................................................................................ I I第一章绪论 (1)1.1行星齿轮传动的发展概况 (1)1.2 行星齿轮传动的发展趋势 (3)1.3 行星齿轮传动的优缺点 (4)1.4 本设计课题简介 (6)第二章摆线针轮减速器传动理论与设计方法 (7)2.1 摆线针轮减速器的传动原理与结构特点 (7)2.1.1 摆线针轮行星传动的传动原理 (7)2.1.2 摆线针轮减速器的结构特点 (7)3.1.3 摆线针轮传动的啮合原理 (8)第三章针齿与摆线轮齿啮合时的作用力 (15)3.1确定初始啮合侧隙 (15)3.2判定摆线轮与针轮同时啮合齿数的基本原理 (16)3.3针齿与摆线轮齿啮合的作用力 (16)3.4输出机构的柱销(套)作用于摆线轮上的力 (17)3.4.1 判断同时传递转矩的柱销数目 (18)3.4.2输出机构的柱销作用于摆线轮上的力 (18)3.4.3 转臂轴承的作用力 (18)3.5 摆线针轮行星减速器主要强度件的计算 (19)3.5.1齿面接触强度计算 (19)3.5.2 针齿抗弯曲强度计算及刚度计算 (19)3.5.3 转臂轴承选择 (20)3.5.4 输出机构柱销强度计算 (20)第四章摆线针轮减速器的设计计算 (22)4.1摆线轮的设计 (22)4.1.1确定传动的结果形式 (22)4.1.2确定摆线轮针轮的齿数 (22)4.1.3确定针轮半径 (22)4.1.4确定短幅系数和偏心距 (23)4.2转臂轴承的选择 (23)4.2.1转臂轴承负载计算 (23)4.2.3转臂轴承选择 (24)4.2.4转臂轴承寿命计算 (24)4.3确定针轮尺寸 (24)4.4摆线轮结果尺寸的计算 (26)4.5确定输出机构中柱销、柱销套和柱销空的直径 (27)4.6摆线轮、针齿、柱销的数据表 (27)第五章轴的计算 (30)5.1输出轴的计算 (30)5.1.1输出轴的结构装配图 (30)5.1.2初步确定轴的最小直径 (30)5.1.3输出轴的结构设计 (30)5.1.4求轴上载荷 (31)5.1.5按弯扭合成应力校核 (31)5.1.6精确校核轴的疲劳强度 (32)5.2输入轴的计算 (33)5.2.1输入轴结构转配图 (33)5.2.2初步确定轴的最小直径 (34)5.2.3轴的结构设计 (34)5.2.4力的计算 (35)5.2.5按弯扭合成强度校核 (35)5.2.6精确校核轴的疲劳强度 (35)第六章箱体的结构设计 (38)6.1箱体的结构设计准则 (38)6.1.1机体应具有足够的刚度 (38)6.1.2应考虑便于机体内零件的润滑、密封及散热 (38)6.1.3机体要有良好的工艺性 (39)6.2减速器箱体密封 (39)6.3试验要求、观、包装、运输和储藏的要求 (39)第七章减速器的润滑 (41)7.1润滑的意义 (41)7.2齿轮润滑剂的选择 (42)参考文献 (44)致谢 (45)第一章 绪论1.1行星齿轮传动的发展概况我国早在南北朝时代(公元429~500年),祖冲之就发明了有行星齿轮的差动式指南车,比欧美早了1300多年。