优选旋锻技术讲座.
- 格式:ppt
- 大小:1.70 MB
- 文档页数:67

提高圆锥齿轮精锻模寿命的方法
杨予勇;姚宣甫;王路虎
【期刊名称】《模具工业》
【年(卷),期】1997()10
【摘要】在直齿圆锥齿轮精锻中,通过模膛深处压力和过剩力的工艺处理,可得到完全充满的锻件,同时提高了模具使用寿命。
【总页数】4页(P37-39)
【关键词】直齿圆锥齿轮;精密锻造;精锻模
【作者】杨予勇;姚宣甫;王路虎
【作者单位】郑州工业高等专科学校;铁道部太原机车厂
【正文语种】中文
【中图分类】TG315.2
【相关文献】
1.典型精锻模设计实例rn第三讲圆锥齿轮精锻模设计(1) [J], 王以华;张海英;周煊;王黎;林健;吴振清
2.典型精锻模设计实例第三讲圆锥齿轮精锻模设计(2) [J], 王以华;张海英;周煊;王黎;林健;吴振清
3.直齿圆锥齿轮精锻模电极齿轮的化铣修形技术 [J], 崔焕勇;舒其馥;付志刚
4.提高伞齿轮精锻模使用寿命的综合技术 [J], 徐根应;李健
5.伞齿轮精锻模失效分析及提高寿命 [J], 李健;丁雪苇;赵学红;黄旭光
因版权原因,仅展示原文概要,查看原文内容请购买。
高强铝合金薄壁管材旋压制备技术摘要:众所周知,高强铝合金以航空需求为背景,不断发展,高强铝合金的出现,更是满足了不同时代飞机发展的不同要求。
而且高强铝合金密度小,强度大,加工性能以及焊接性能都比较好,因此高强铝合金满足了现代飞机发展所要求的轻量化,宽畅化,舒适化,寿命长等一系列要求。
本文将简单介绍高强铝合金薄壁管材旋压制备技术。
关键词:铝合金旋压制备技术技术分析1、前言高强铝合金具有强度高,耐热性能好等优点,以2024铝合金为例,该合金薄壁管材主要应用于飞机的机身框架,机翼的金属条以及机翼的肋骨部位等受力条件。
除此之外,还有一部分高强铝合金也被广泛应用于交通,建筑等行业领域,目前国内已经对高强铝合金薄壁管材旋压制备技术有初步的了解,本文将以此为基础进行简要探究。
2、高强铝合金的历程高强铝合金的发展历程大概可以概括为五个阶段,而其被分为五个阶段的依据是高强铝合金的成分,工艺,组织,性能等。
第一代铝合金为高静强度铝合金,第二代铝合金为高强耐腐蚀铝合金,而第三代铝合金记具备更强的性能,更好的韧性,而且还具备耐腐蚀的特点,因此被称为高强高韧奈蚀铝合金。
第四代铝合金在第三代铝合金的基础上,增加了另一项功能,这项功能为高耐损伤,因此第四代铝合金被称为高强高韧耐蚀,高耐损伤铝合金。
而第五代铝合金又增加了低淬火敏感性这一功能。
由此可见,随着铝合金的各个阶段的特征的不同,其功能也更加丰富,其将来被应用的范围也会更加广泛[1]。
3、铝合金薄壁管材旋压制备技术背景因为铝合金的比重较小,价格较为低廉,因此被广泛的应用于航天建筑,航空,电子,机械等各个领域。
除此之外,铝合金凭借其低廉的价格,在人们日常生活中的应用范围十分广泛,它的用量仅次于钢铁,成为第二大有色金属材料,足以见得其地位非常重要。
除此之外,铝合金在形成之前,由于其中注入的金属元素不同,可以将铝合金分为以下几个体系,他们分别为铝锌系,铝铜系,铝镁系,铝锡系。
按照铝合金的性能及用途不同,又可以将铝合金分为防锈铝,硬铝,超硬铝,锻硬铝[2]。
旋转锻造成形技术研究现状发表时间:2020-04-30T14:49:28.637Z 来源:《基层建设》2020年第2期作者:刘诗亮闫加宝王泽[导读] 摘要:锻造旋转是净成形工艺中使用的精密制造、棒料、管材或线材,具有广泛的优势,极大的加工精度,良好的产品性能,材料利用率高和生产的灵活性,而汽车和航空航天工业中被广泛使用。
黑龙江省齐齐哈尔市中车齐齐哈尔车辆有限公司锻造分厂黑龙江齐齐哈尔 161000摘要:锻造旋转是净成形工艺中使用的精密制造、棒料、管材或线材,具有广泛的优势,极大的加工精度,良好的产品性能,材料利用率高和生产的灵活性,而汽车和航空航天工业中被广泛使用。
本文对旋转锻造成形技术的研究现状进行了分析。
关键词:机械制造;旋转锻造;现状;上个世纪起源于美国的旋锻锻造工艺最初仅限于管径的减小。
后来,德国在用空心圆柱形毛坯制造复杂零件方面取得了进展。
与传统的旋锻相比,旋锻锻造有许多优点,例如在环境保护和减少废物处理方面,这些方面现在受到高度重视。
一、旋转锻造原理及其特点由两至四块锻模环绕坯料轴线的高速旋转旋的过程使转锻成型的,而塑造的是高频的,从而降低轴截面尺寸的球或改变其形状。
根据模具的径向锻造方式和钢坯的轴向运动,进料式和凹进式是旋转锻造两大类,如图1所示。
与传统加工相比,旋转锻造具有以下优点:1.加工范围广,材料高利用率。
旋转锻造可以加工许多不同的形状和腔体,从而锻造淬火和退火的材料。
与普通锻造相比,旋转锻造可以节省20%到50%的材料。
2.成形近净和高精度加工。
加工尺寸各不相同,±0.01~±0.1 mm尺寸外表公差可,精度IT8~IT9级。
在加工芯轴时,±0.01~±0.03 mm 内尺寸表面公差,精度IT6~IT8级。
加工方式各不相同,Ra≤1μm旋锻进料式成形圆度,Ra≤0.1μm旋锻凹进式成形圆度。
与毛坯同轴度比提高50%。
3.该产品具有良好的性能,允许轻量化成型。
旋锻Mo-Ti-Zr合金棒材的退火行为罗明;范景莲;成会朝;田家敏【摘要】采用冷等静压、高温烧结和直接高温旋锻的方法制备Mo-Ti-Zr合金棒材,研究不同退火温度对合金力学性能与显微组织的影响以及对断面收缩率为30%的旋锻Mo-Ti-Zr合金棒材的退火行为.结果表明:当退火温度低于1 000 ℃时,随着退火温度的升高,Mo-Ti-Zr合金硬度未急剧下降,抗拉强度和伸长率逐渐提高;经900 ℃退火后,合金抗拉强度达到669 MPa,伸长率达到3.1%,获得良好的综合力学性能;当退火温度在800~1 000 ℃范围内时,Mo-Ti-Zr合金晶粒发生再结晶细化;旋锻态Mo-Ti-Zr合金的断口主要为穿晶解理断裂,随着退火温度的提高,出现较多细晶粒的穿晶断裂和沿晶断裂.【期刊名称】《中国有色金属学报》【年(卷),期】2010(020)005【总页数】6页(P866-871)【关键词】Mo-Ti-Zr合金;冷等静压;高温烧结;旋锻;退火;再结晶【作者】罗明;范景莲;成会朝;田家敏【作者单位】中南大学,粉末冶金国家重点实验室,长沙,410083;中南大学,粉末冶金国家重点实验室,长沙,410083;中南大学,粉末冶金国家重点实验室,长沙,410083;中南大学,粉末冶金国家重点实验室,长沙,410083【正文语种】中文【中图分类】TF125.2Abstract:The Mo-Ti-Zr alloy bars were prepared by cold isostatic pressing, high temperature sintering and direct rotary forging. The effects of the annealing temperature on the mechanical properties and microstructure of the alloy and the annealing behavior of this rotary forging Mo-Ti-Zr alloy bars deformed by 30% were investigated. The results show that,with increasing annealing temperature before 1 000 ℃, the hardness of the M o-Ti-Zr alloy bars decreases slowly whereas the tensile strength and elongation increase. The tensile strength and elongation reach 669 MPa and 3.1%, respectively, at 900 ℃. The recrystallization of the Mo-Ti-Zr alloy bars occurs and the grains are refined at the annealing temperature of 800−1 000 ℃ . For the rotary forging Mo-Ti-Zr alloy bars, its fracture is mainly a transcrystalline fracture type. The mixed type of transcrystalline fracture and intergranular fracture in the refined grains increases with increasing annealing temperature.Key words:Mo-Ti-Zr alloy; cold isostatic pressing; high temperature sintering; rotary forging; annealing;recrystallizationMo-Ti-Zr合金是应用广泛的钼合金,具有熔点高、强度大、抗蚀性能强以及高温力学性能良好等优点而应用于鱼雷发动机中的配气阀体、火箭喷嘴、燃气管道、喷管喉衬和穿孔顶头等[1−3]。
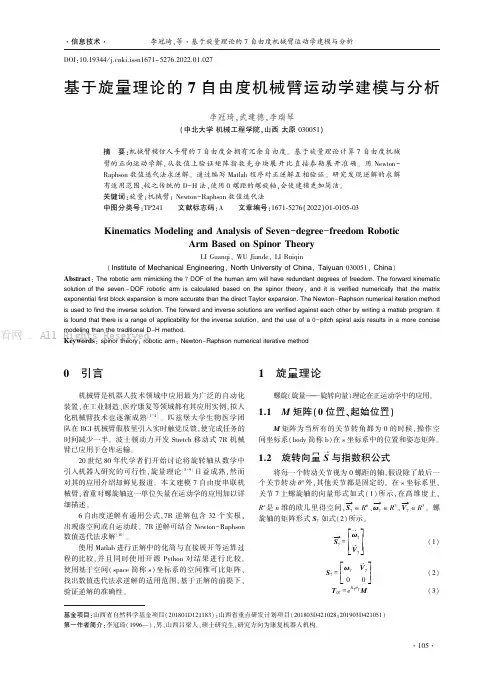
基金项目:山西省自然科学基金项目(201801D121183)ꎻ山西省重点研发计划项目(201803D421028ꎻ201903D421051)第一作者简介:李冠琦(1996 )ꎬ男ꎬ山西吕梁人ꎬ硕士研究生ꎬ研究方向为康复机器人机构ꎮDOI:10.19344/j.cnki.issn1671-5276.2022.01.027基于旋量理论的7自由度机械臂运动学建模与分析李冠琦ꎬ武建德ꎬ李瑞琴(中北大学机械工程学院ꎬ山西太原030051)摘㊀要:机械臂模仿人手臂的7自由度会拥有冗余自由度ꎮ基于旋量理论计算7自由度机械臂的正向运动学解ꎬ从数值上验证矩阵指数先分块展开比直接泰勒展开准确ꎮ用Newton-Raphson数值迭代法求逆解ꎮ通过编写Matlab程序对正逆解互相验证ꎮ研究发现逆解的求解有适用范围ꎬ较之传统的D-H法ꎬ使用0螺距的螺旋轴ꎬ会使建模更加简洁ꎮ关键词:旋量ꎻ机械臂ꎻNewton-Raphson数值迭代法中图分类号:TP241㊀㊀文献标志码:A㊀㊀文章编号:1671 ̄5276(2022)01 ̄0105 ̄03KinematicsModelingandAnalysisofSeven-degree-freedomRoboticArmBasedonSpinorTheoryLIGuanqiꎬWUJiandeꎬLIRuiqin(InstituteofMechanicalEngineeringꎬNorthUniversityofChinaꎬTaiyuan030051ꎬChina)Abstract:Theroboticarmmimickingthe7DOFofthehumanarmwillhaveredundantdegreesoffreedom.Theforwardkinematicsolutionoftheseven-DOFroboticarmiscalculatedbasedonthespinortheoryꎬanditisverifiednumericallythatthematrixexponentialfirstblockexpansionismoreaccuratethanthedirectTaylorexpansion.TheNewton-Raphsonnumericaliterationmethodisusedtofindtheinversesolution.Theforwardandinversesolutionsareverifiedagainsteachotherbywritingamatlabprogram.Itisfoundthatthereisarangeofapplicabilityfortheinversesolutionꎬandtheuseofa0-pitchspiralaxisresultsinamoreconcisemodelingthanthetraditionalD-Hmethod.Keywords:spinortheoryꎻroboticarmꎻNewton-Raphsonnumericaliterativemethod0㊀引言机械臂是机器人技术领域中应用最为广泛的自动化装置ꎬ在工业制造㊁医疗康复等领域都有其应用实例ꎬ拟人化机械臂技术也逐渐成熟[1-4]ꎮ匹兹堡大学生物医学团队在BCI机械臂假肢里引入实时触觉反馈ꎬ使完成任务的时间减少一半ꎮ波士顿动力开发Stretch移动式7R机械臂已应用于仓库运输ꎮ20世纪80年代学者们开始讨论将旋转轴从数学中引入机器人研究的可行性ꎬ旋量理论[5-9]日益成熟ꎬ然而对其的应用介绍却鲜见报道ꎮ本文建模7自由度串联机械臂ꎬ着重对螺旋轴这一单位矢量在运动学的应用加以详细描述ꎮ6自由度逆解有通用公式ꎬ7R逆解包含32个实根ꎬ出现虚空间或自运动歧ꎮ7R逆解可结合Newton-Raphson数值迭代法求解[10]ꎮ使用Matlab进行正解中的化简与直接展开等运算过程的比较ꎬ并且同时使用开源Python对结果进行比较ꎮ使用基于空间(space简称s)坐标系的空间雅可比矩阵ꎬ找出数值迭代法求逆解的适用范围ꎬ基于正解的前提下ꎬ验证逆解的准确性ꎮ1㊀旋量理论螺旋(旋量 旋转向量)理论在正运动学中的应用ꎮ1.1㊀M矩阵(0位置㊁起始位置)M矩阵为当所有的关节转角都为0的时候ꎬ操作空间坐标系(body简称b)在s坐标系中的位置和姿态矩阵ꎮ1.2㊀旋转向量Sң与指数积公式将每一个转动关节视为0螺距的轴ꎬ假设除了最后一个关节转动θʎ外ꎬ其他关节都是固定的ꎮ在s坐标系里ꎬ关节7上螺旋轴的向量形式如式(1)所示ꎬ在高维度上ꎬRn是n维的欧几里得空间ꎬS7ңɪR6㊁ω7ңɪR3ꎬV7ңɪR3ꎮ螺旋轴的矩阵形式S7如式(2)所示ꎮS7ң=ωң7Vң7éëêêùûúú(1)S7=ω7Vң700éëêêùûúú(2)T07=eS7θ7M(3)501 博看网 . All Rights Reserved.特殊正交群是所有有效的3ˑ3旋转矩阵的集合群SO(3):包括R㊁ω㊁eωθꎮ特殊的欧几里得集合群或刚体运动群或R3中的同质变换矩阵Se(3)表示位姿:包括M㊁eSθ㊁T07ꎮeSθ=I+Sθ+S2θ22!+S3θ33!+ =eωθf(θ)ν01éëêêùûúú(4)式(4)中ꎬ可利用特性ω3=-ω来化简ꎬ且eωθ有Rodrigues公式:f(θ)=Iθ+(1-cosθ)ω+(θ-sinθ)ω2(5)eωθ=I+sinθω+(1-cosθ)ω2(6)依次解锁一个角度ꎬ往前代值ꎬ得到T07=eS1θ1 eS7θ7M(7)2㊀数值法逆解使用非线性寻根的Newton-Raphson方法ꎬ有寻根㊁不存在根时寻找近似解㊁存在多个解时寻找最优解的优势ꎮ给定一个初始值ꎬ然后代入迭代式求解直到出现误差范围内的解ꎮ设正向运动学函数为f(θd)ꎬ末端执行器的位置向量为νꎬ非线性寻根Newton-Raphson是找到目标函数的解ꎮ几何视角如图1所示ꎻ式(8)是解析视角ꎮ式(9)-式(11)是计算雅可比矩阵ꎮ图1㊀迭代法几何过程Δθ=J-1(θ0)[vd-f(θi)](8)JS(θ)=JS1(θ1)ңJS2(θ2)ң JSn(θn)ң[](9)JS1(θ1)ң=S1ң(10)JSi(θi)ң=[eS1θ1 eSi-1θi-1]∗Siң(11)式中∗为其伴随矩阵ꎮ对这种算法的进一步改进:1)末端执行器的位置描述f(θd)变更为正运动学计算出的矩阵T07ꎮ2)误差调整ꎮ用螺旋轴SMTң两分量的模代替末端执行器每次迭代的位置变化ꎮ3)引进伪逆矩阵J†避免求解奇异时无解的情况ꎮ在Matlab里编程为pinv(J)ꎮ当前基于b坐标系ꎬ变换为基于s坐标系:SMTbң=log(TMT07(θi))(12)SMTsң=(Tsb)∗SMTbң(13)式中:Tsb是坐标转移矩阵ꎻ∗为求其伴随矩阵ꎮ改进算法的流程图如图2所示ꎮ图2㊀改进的数值迭代法流程图3㊀验证正逆解3.1㊀正运动学方程㊀绘制三维模型图ꎬ并建立7R示意图(图3)进行验证ꎮ如图3(b)所示的坐标平面ꎬy方向定义为a并依次标号ꎬz方向定义为b也依次序标号ꎮ标示7个螺距为0的右手螺旋轴S1ң-S7ңꎮM=1000010240000100001éëêêêêùûúúúú(14)S7ң=[0㊀0㊀1㊀-a7㊀0㊀0]T=[0㊀0㊀1㊀-300㊀0㊀0]T(15)U a U 7Rb 7R .图3㊀三维模型图及7R示意图根据式(3)ꎬ使用矩阵分块后化简的运算过程ꎬ编程并计算结果ꎮT(θ)=c7-s70-2700s7s7c702700c7-30000100000éëêêêêùûúúúú(16)根据式(3)ꎬ发现将矩阵指数直接泰勒展开(采用了3种计算方法:Pada法㊁特征值法㊁6次的泰勒展开)得出的601结果虽然一致ꎬ但是它是虚数形式ꎬ增加了计算量ꎮ结果:TM_pada(θ)=c7-s70-2700s7s7c701350e-θ7i+1350eθ7i-30000100001éëêêêêùûúúúú(17)使用先进行矩阵分块然后利用特性化简的运算方法ꎬ该结果更准确㊁后期的运算量更小ꎮ代入式(7)ꎬ使用该方法分别在Matlab和Python中运算ꎬ得出的结果一致:T=c5-6c1234c7-s1234c7-s1234c7-c5-6c1234s7-s5-6c1234r1c1234s7+c5-6s1234c7c1234c7-c5-6s1234s7-s5-6s1234r2s5-6c7-s5-6s7c5-6r30001éëêêêêêùûúúúúúr1=150s1234-5-1350s12347-300s123-675s123457-6-675s123467-5-150s12345-1350s1234-7+600s1234+300s12+675s12345-6-7+675s12346-5-7-300s1+750s12345-6-750s12346-5r2=150c1234-5+1350c12347+300c123+675c123457-6+675c123467-5-150c1234-5+1350c1234-7-600c1234-300c12-675c12345-6-7-675c12346-5-7+300c1-750c12345-6+750c12346-5r3=2700s7c5s6-s5c6-1500s5s6-c5(1500c6-1500)-1200c5+12003.2㊀逆运动学方程1)第一次验证设初始位置为正解的0位置ꎬ转动角度为θlistꎮθlist=πꎻπ2ꎻπ3ꎻπ4ꎻπ5ꎻπ6ꎻπ7[]=[3.142ꎻ1.571ꎻ1.047ꎻ0.785ꎻ0.628ꎻ0.524ꎻ0.449]给逆解的初始值[3ꎬ1.5ꎬ1ꎬ0.6ꎬ0.5ꎬ0.4ꎬ0.3]ꎮ解得[3.161ꎬ1.563ꎬ1.059ꎬ0.762ꎬ0.628ꎬ0.523ꎬ0.449]ꎮ2)第二次验证因发现误差较大:1)改用角度制ꎻ2)迭代次数增加到1000次ꎻ3)精度调整为eω<0.0001ꎬev<0.0001ꎮ经过多组数据实验发现ꎬ相差3ʎ以内ꎬ位置完全重现ꎻ相差10ʎ以内ꎬ第一角度有0.1ʎ的偏差ꎻ相差15ʎ以上的逆运算ꎬ第一个角度有1ʎ以上的偏差ꎮ所以ꎬ该方法求逆解有完全重现的适用范围ꎬ需要把初始解猜测在真实解的附近15ʎ以内(表1)ꎮ表1㊀正逆解互相验证单位:(ʎ)㊀验证项目θ1θ2θ3θ4θ5θ6θ7Δθ初始角度10203040506070 猜测角度7172737475767计算的逆解102030405060700猜测角度6162636465666计算的逆解10.00120.00129.99939.9995060700.001猜测角度1112131415161计算的逆解10.0620.03229.94939.9595060700.060猜测角度0102030405060计算的逆解10.120.05329.91639.9325060700.100猜测角度-551525354555计算的逆解10.7420.40329.37339.4845060700.740续表1验证项目θ1θ2θ3θ4θ5θ6θ7Δθ猜测角度-641424344454计算的逆解11.0320.56629.12839.2765060701.030猜测角度-13-3717273747计算的逆解26.72824.46724.37534.4295060706.728猜测角度-15-5515253545计算的逆解24.46633.10318.25724.17350607014.466猜测角度-16-7414243444计算的逆解63.432-26.264-22.72585.55750607053.4324㊀结语本文重点介绍了如何使用形如螺旋楼梯的转向量计算正逆解ꎮ结合旋量与Newton-Raphson数值法求逆解ꎮ为涵盖转动机构可能出现的问题ꎬ采用目前串联机构中最复杂的7R机构并且使机构尽可能复杂ꎬ但是设计中没有涵盖helical螺旋和cylindrical圆筒等机构ꎮ在比较了不同的运算方法后ꎬ计算正解ꎬ得出先将矩阵分块㊁再利用特性化简的方法更好的结论ꎮ在计算逆解的过程中ꎬ发现当初始猜测的第一个角度超过真实解20ʎꎬNewton-Raphson数值法不会重现正解ꎮ验证结果表明旋量形式美观ꎬ建模快捷ꎬ编程明了ꎬ适用于机械臂中的串联机构㊁并联机构㊁转动关节㊁平动关节㊁螺旋关节等的运动学㊁动力学特性建模和分析ꎮ参考文献:[1]FLESHERSNꎬDOWNEYJEꎬWEISSJMꎬetal.Abrain-computerinterfacethatevokestactilesensationsimprovesroboticarmcontrol[J].Scienceꎬ2021ꎬ372(6544):831 ̄836.[2]KEVINMLꎬFRANKCP.Modernrobotics:mechanicsplanningandcontrol[M].Illinois:CambridgeUniversityPressꎬ2017.[3]刘世平ꎬ曹俊峰ꎬ孙涛ꎬ等.基于BP神经网络的冗余机械臂逆运动学分析[J].中国机械工程ꎬ2019ꎬ30(24):2974 ̄2977ꎬ2985.[4]赵京ꎬ王鑫ꎬ张自强ꎬ等.基于肘部自运动的主从异构7自由度机械臂运动映射及其几何逆解[J].机械工程学报ꎬ2020ꎬ56(15):181 ̄190.[5]YOUWSꎬLEEYHꎬOHHSꎬetal.Designofa3D-printableꎬrobustanthropomorphicrobothandincludingintermetacarpaljoints[J].IntelligentServiceRoboticsꎬ2019ꎬ12(1):1 ̄16.[6]BINDURAꎬNELOYAAꎬALAMSꎬetal.Sigma-3:Integrationandanalysisofa6DOFroboticarmconfigurationinarescuerobot[C]//20194thInternationalConferenceonRoboticsandAutomationEngineering(ICRAE).Singapore:IEEEꎬ2019:6 ̄11.[7]常健ꎬ王亚珍ꎬ李斌.基于力/位混合算法的7自由度机械臂精细操控方法[J].机器人ꎬ2016ꎬ38(5):531 ̄539.[8]张昌ꎬ武玉强.基于P-Rob六自由度机械臂运动学建模与仿真[J].包装工程ꎬ2020ꎬ41(11):166 ̄173.[9]WIEDMEYERWꎬALTOÉPꎬAUBERLEJꎬetal.Areal-time-capableclosed-formmulti-objectiveredundancyresolutionschemeforseven-DoFserialmanipulators[J].IEEERoboticsandAutomationLettersꎬ2021ꎬ6(2):431 ̄438.收稿日期:20210401701 博看网 . All Rights Reserved.。

浅谈武术套路旋子转体720动作技术分析武绍芳山东省日照市体育运动学校一、引言2002年后新规则的制订使评分标准准确性更进一步,区分度提高。
可操作性大大加强,完全与奥林匹克精神相衔接。
现今,武术高水平运动员的身体素质,基本技术以及演练水平的差距日趋缩短。
所以跳跃动作难度性系数的选择,直接成了决定运动员名次评定的一个重要的因素。
旋子转体720度动作是在360度动作的基础上,是在跳跃高度。
旋转速度的增加和延伸,该动作失误则会给整套演练带来影响,所以说旋子转体720度动作质量的好坏直接影响到运动员的比赛成绩。
由于旋子转体720度动作结构复杂并且作为武术套路跳跃动作中的一种。
能够充分表现武术套路运动中难与美的特点。
所以现阶段有很多的高水平运动员不能掌握此动作或者是不能够规格的完成此动作。
因此。
武术套路运动员高质量的完成旋子转体720度,是武术教学的训练的难点。
所以,本文以长拳为例,以旋子转体720度的动作原理,训练方法以及辅助性练习三方面进行系统的研究并提出相应的对策。
二、研究对象与方法1.研究对象。
本文以山东体育学院武术队和山东省体育运动学校武术队20人进行调查。
2.研究方法。
2.1文献资料法:根据研究的目的和内容查阅相关资料。
2.2问卷调查法:向山东体育学院和山东省体育运动学校武术队发放问卷20份。
2.3综合分析法:根据调查结果和结合相关资料进行综合分析。
3.讨论与分析。
旋子转体720度动作是武术套路运动中具有一定的技术难度,结构复杂环环相扣的一个动作且要求运动员在不到2秒的时间内完成。
因此,它对运动员的身体素质、控制身体的能力、空中滞空时间、对动作的时间分布以及完成动作的准确度、精度等方面都提出了非常高的要求。
在练习中我们要明确旋子转体720度的动作构成及其动作要领。
一般旋子转体720度动作的动作过程可分为助跑起跳、旋子、空中转体720度、落地四个环节。
3.1助跑起跳阶段。
助跑是完成旋子转体720度动作的准备阶段。

螺旋链核心训练方法:
螺旋链核心训练方法是一种训练核心肌肉群的方法,它通过旋转动作来激活深层肌肉,提高身体的稳定性和平衡性。
以下是螺旋链核心训练方法的一些要点:
1.起始姿势:通常采用平板支撑或腹部抬高的姿势作为起始姿势。
2.旋转动作:通过手臂或腿部的旋转动作来激活深层肌肉,例如侧向旋转或前后旋转。
3.控制动作:在旋转过程中,要保持身体的稳定性和平衡性,控制动作的幅度和速度。
4.重复练习:多次重复练习,加强肌肉的记忆和稳定性。
5.逐渐增加难度:可以通过增加重量、减少支撑、增加旋转角度等方式逐渐增加难度,提高训练效果。
提高锻模寿命的新途径
刘文龙
【期刊名称】《摩托车技术》
【年(卷),期】1989(000)002
【总页数】4页(P40-43)
【作者】刘文龙
【作者单位】无
【正文语种】中文
【中图分类】TG315.2
【相关文献】
1.铝合金锻模常见失效分析与提高锻模寿命的方法 [J], 李亚红;张宏伟;单长智
2.对连杆锻模设计的探讨:改进锻模设计提高锻件质量及模具寿命 [J], 王怀利
3.提高锻模寿命,降低锻模成本的分析与实践 [J], 李研
4.从锻模的失效形式,谈提高锻模寿命途径 [J], 吴代斌;颜斌
5.气门锻模的热处理与提高寿命的措施 [J], 王忠诚;隋培玲;朱丽华
因版权原因,仅展示原文概要,查看原文内容请购买。
锻压新技术讲座:第四讲旋转锻造
崔世强
【期刊名称】《机械工人:热加工》
【年(卷),期】1991(000)009
【摘要】旋转锻造又称径向锻造,它是利用分布于坯料横截面周围的两个以上的锤头、对坯料进行同步脉冲对击,使棒料或管料直径减小、长度增加的一种精锻工艺。
在锻造过程中,毛坯与锤头既有相对轴向运动,又有旋转运动。
旋转锻造适用于各种
外形实心和空心长轴类锻件。
【总页数】5页(P60-64)
【作者】崔世强
【作者单位】无
【正文语种】中文
【中图分类】TG31
【相关文献】
1.现场设备诊断技术讲座第四讲旋转机械分类诊断及常见故障判别 [J], 易良榘
2.金属塑性成形技术基础讲座第四讲模型锻造(上) [J], 代金旭;申荣华
3.金属塑性成形技术基础讲座第四讲模型锻造(下) [J], 代金旭;申荣华
4.锻压新技术讲座:第七讲液态模锻 [J], 崔世强
5.锻压技术讲座:第八讲粉末锻造 [J], 崔世强
因版权原因,仅展示原文概要,查看原文内容请购买。
一种整锻六拐曲轴的锻造工艺方法
李剑;李新生;张华
【期刊名称】《锻压技术》
【年(卷),期】2004(29)2
【摘要】介绍一种整锻六拐曲轴的锻造工艺方法。
通过采用角度预置 ,利用上下平砧 ,在水压机上自由锻造生产的六拐曲轴锻件 ,具有金属纤维连续无扭曲 ,工装辅具投入少。
【总页数】2页(P10-11)
【关键词】六拐曲轴;锻造;角度预置;水压机;自由锻
【作者】李剑;李新生;张华
【作者单位】莱钢股份有限公司锻压厂
【正文语种】中文
【中图分类】TG316.2
【相关文献】
1.一种六缸错拐曲轴模锻件的工艺研究及应用 [J], 孙海霞;刘玲玲;刘亚丽
2.大型六拐曲轴自由锻造工艺研究 [J], 赵艳敏;李晶晶;赵熙喆
3.整锻三拐曲轴锻造新工艺 [J], 逯伟;付前进;王永亮
4.夹角互成120°六拐曲轴锻造成形工艺分析 [J], 郭海萍; 张晓旭; 赵艳敏
5.一种三拐曲轴整体锻造方法 [J], 贾俊林;蒋伟斌;赵艳荣;史睿
因版权原因,仅展示原文概要,查看原文内容请购买。