第Ⅱ象限 R=180°第Ⅲ象限 R= -180° 第Ⅳ象限 R=360°-
R4 4
0 3
R3
Ⅲ P3
1
Y 2 R2
P2 Ⅱ
三.直角坐标与极坐标X的换算
1.在坐标系中表示两个点的关系:
极坐标表示: S12, 12;
Y12
直角坐标表示:X12,Y12 (X12=X2-X1,Y12=Y2-Y1)
X12 12
空间卫星座
GPS图示
24颗卫星发射信号
卫星轨道、时间数据及
辅助资料信息
地面监控 中央控制系统 时间同步 跟踪卫星定位
2、GPS定位原理
(1)测边后方交会 0-XYZ为空间三维坐标系统; A(xa,ya,za)、 B(xb,yb,zb)
为 待定点; S1,S2,S3,S4为空间已知
点 (卫星),坐标分别为x1y1z1, x2y2z2, x3y3z3 , x4y4z4
(km)
(mm)
()
闭合差
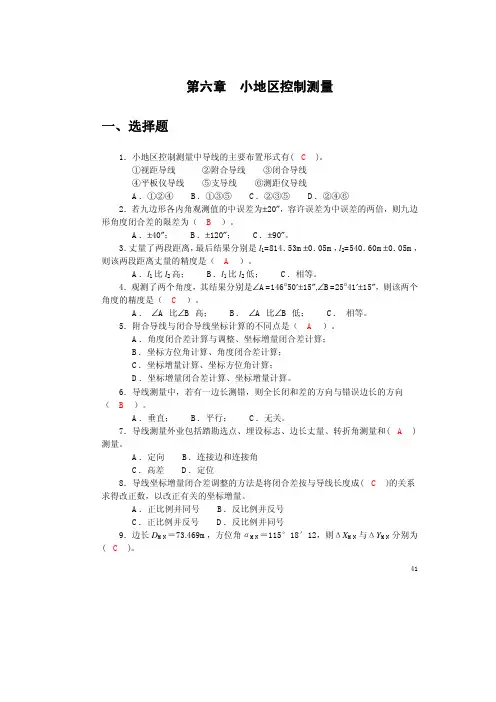
1:500 500 75 一般地区
1:1000 1000 110 1/3000 20 1 1/2000 60 n
1:2000 2000 180
方位角 闭合差
三.高程控制测量
三.高程控制 测量
——建立高程控制网,测定各控制点的高程H。
主要方法 :水准测量 另外方法:三角高程测量、电子全站仪高程测量。
(6-2-7) (6-2-8)
四.导线计算的基本公式
四.导线计算的 基本公式
如图,A、B为已知导线点,1、2、3...为新建导线点。
观测了导线转折角 B、 1、 2...
观测了导线各边长SB、S1、S2...
计算1、2、3...的坐标: