基于FPGA的CIC抽取滤波器设计与实现
- 格式:pdf
- 大小:422.90 KB
- 文档页数:3
基于FPGA的sinc3结构的数字抽取滤波器基于FPGA的sinc3结构的数字抽取滤波器,今年电子设计大赛D题必用的模块,实测效果非常好,做西格玛-德尔塔ADC必用的滤波器module sinc3(mdata1, mclk1, reset, DATA ,word_clk,mode);input mclk1; /*滤波器工作时钟*/input reset; /*滤波器复位*/input mdata1; /*接收到的待滤波的数据*/input [1:0]mode;output [15:0] DATA; /*滤波完成的数据*/output word_clk;integer location;integer info_file;reg [35:0] ip_data1;reg [35:0] acc1;reg [35:0] acc2;reg [35:0] acc3;reg [35:0] acc3_d1;reg [35:0] acc3_d2;reg [35:0] diff1;reg [35:0] diff2;reg [35:0] diff3;reg [35:0] diff1_d;reg [35:0] diff2_d;reg [15:0] DATA;reg [11:0] word_count;reg word_clk;reg init;/*Perform the Sinc ACTION*/always @ (mdata1)if(mdata1==0)ip_data1 <= 0; /* change from a 0 to a -1 for 2's comp */elseip_data1 <= 1;/*ACCUMULATOR (INTEGRATOR) Perform the accumulation (IIR) at thespeed of the modulator.Z = one sample delayMCLKOUT = modulators conversion bit rate*/always @ (posedge mclk1 or posedge reset)if (reset)begin/*initialize acc registers on reset*/acc1 <= 0;acc2 <= 0;acc3 <= 0;endelsebegin/*perform accumulation process*/acc1 <= acc1 + ip_data1;acc2 <= acc2 + acc1;acc3 <= acc3 + acc2;end/*DECIMATION STAGE (MCLKOUT/ WORD_CLK)*/ always @ (negedge mclk1 or posedge reset)if (reset)。
FPGA的FIR抽取滤波器设计用FPGA实现抽取滤波器比较复杂,主要是因为在FPGA中缺乏实现乘法运算的有效结构,现在,FPGA中集成了硬件乘法器,使FPGA在数字信号处理方面有了长足的进步。
本文介绍了一种采用Xilinx公司的XC2V1000实现FIR抽取滤波器的设计方法。
具体实现结构设计基于抽取滤波器的工作原理,本文采用XC2V1000实现了一个抽取率为2、具有线性相位的3阶FIR抽取滤波器,利用原理图和VHDL共同完成源文件设计。
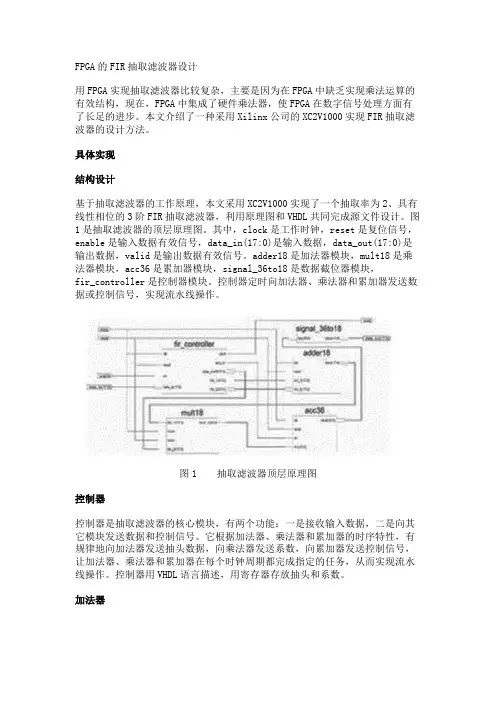
图1是抽取滤波器的顶层原理图。
其中,clock是工作时钟,reset是复位信号,enable是输入数据有效信号,data_in(17:0)是输入数据,data_out(17:0)是输出数据,valid是输出数据有效信号。
adder18是加法器模块,mult18是乘法器模块,acc36是累加器模块,signal_36to18是数据截位器模块,fir_controller是控制器模块。
控制器定时向加法器、乘法器和累加器发送数据或控制信号,实现流水线操作。
图1 抽取滤波器顶层原理图控制器控制器是抽取滤波器的核心模块,有两个功能:一是接收输入数据,二是向其它模块发送数据和控制信号。
它根据加法器、乘法器和累加器的时序特性,有规律地向加法器发送抽头数据,向乘法器发送系数,向累加器发送控制信号,让加法器、乘法器和累加器在每个时钟周期都完成指定的任务,从而实现流水线操作。
控制器用VHDL语言描述,用寄存器存放抽头和系数。
加法器加法器的输入和输出都是18 bit,用VHDL语言描述实现。
它有两个工作时钟的延迟,在输入数据准备好的情况下,第一个时钟得出相加结果,第二个时钟把相加结果锁存输出。
乘法器乘法器为18 bit输入,36bit输出,用库元件MULT18X18S和36 bit锁存器实现。
MULT18X18S是XC2V1000自带的18×18bit硬件乘法器,单个时钟就可完成乘法运算。

基于_FPGA_的卡尔曼滤波器的设计与实现FPGA(Field Programmable Gate Array)是一种可以重新编程的可编程逻辑器件,可以根据用户的需要进行重新配置和编程,从而实现不同的应用。
卡尔曼滤波器是一种用于估计系统状态的滤波器,能够通过利用过去观测值和当前的测量值来估计未来的状态。
在本文中,我们将探讨基于FPGA的卡尔曼滤波器的设计与实现。
卡尔曼滤波器是一种递归的估计算法,用于估计状态变量的最优估计。
它将过去的观测值和当前的测量值进行加权平均,得到对未来状态的估计。
在实时应用中,常常需要高速和高准确度的数据处理,这就需要一种高效的硬件实现方法。
基于FPGA的卡尔曼滤波器可以提供高性能的实时数据处理,同时还能够灵活地适应不同的实时应用的需求。
基于FPGA的卡尔曼滤波器的设计与实现主要包括以下几个方面:首先,需要设计FPGA的硬件结构。
硬件结构通常包括状态估计器、卡尔曼增益计算器和误差估计器等关键模块。
状态估计器用于估计当前系统的状态变量,卡尔曼增益计算器用于计算卡尔曼增益矩阵,误差估计器用于估计状态估计器的误差。
这些模块之间需要进行数据传递和计算,因此需要设计合适的数据通路和控制信号。
其次,需要进行FPGA的编程和配置。
FPGA可以通过硬件描述语言(如VHDL或Verilog)进行编程和配置。
在设计过程中,需要将卡尔曼滤波器的算法转化为相应的硬件描述,并利用FPGA的配置工具将其加载到FPGA芯片中。
然后,需要进行系统级的仿真和验证。
在设计过程中,可以通过使用仿真工具对系统进行仿真和验证。
通过仿真可以检查系统的功能和性能,并进行必要的调试和优化。
最后,需要进行性能评估和优化。
FPGA的设计和实现需要考虑多个指标,如延迟、功耗和面积等。
通过性能评估和优化可以找出系统的瓶颈,并进行相应的改进,以提高系统的性能。
总结起来,基于FPGA的卡尔曼滤波器的设计与实现是一个复杂的过程,需要进行硬件结构设计、FPGA编程和配置、系统仿真和验证以及性能评估和优化等多个步骤。
基于FPGA的中值滤波算法的实现1.背景知识中值滤波法是⼀种⾮线性平滑技术,它将每⼀像素点的灰度值设置为该点某邻域窗⼝内的所有像素点灰度值的中值.中值滤波是基于排序统计理论的⼀种能有效抑制噪声的⾮线性信号处理技术,中值滤波的基本原理是把数字图像或数字序列中⼀点的值⽤该点的⼀个邻域中各点值的中值代替,让周围的像素值接近的真实值,从⽽消除孤⽴的噪声点。
⽅法是⽤某种结构的⼆维滑动模板,将板内像素按照像素值的⼤⼩进⾏排序,⽣成单调上升(或下降)的为⼆维数据序列。
⼆维中值滤波输出为g(x,y)=med{f(x-k,y-l),(k,l∈W)} ,其中,f(x,y),g(x,y)分别为原始图像和处理后图像。
W为⼆维模板,通常为3*3,5*5区域,也可以是不同的的形状,如线状,圆形,⼗字形,圆环形等。
中值滤波法对消除椒盐噪声⾮常有效,在光学测量条纹图象的相位分析处理⽅法中有特殊作⽤,但在条纹中⼼分析⽅法中作⽤不⼤.中值滤波在图像处理中,常⽤于保护边缘信息,是经典的平滑噪声的⽅法。
2.中值滤波理论中值滤波是⼀种⾮线性滤波,在数字图像处理中,对于 N X N (N 为奇数) 中值滤波器,可以滤除⼩于或等于邻域中(N 2- 1)/2 个像素的噪声并且较好地保持图像的边缘[3]。
对图像进⾏中值滤波处理⾸先要确定⼀个模板 N ×N ,⼀般选取 3X 3 或 5 ×5。
中问位置的图像数据的表达式为f (x ,y ) = med{f (x ± k,Y ± Z) , (K≤ (N -1) /2,Z≤ (N-1) /2) }要得到模板中数据的中间值,⾸先要将数据按⼤⼩排序,然后根据有序的数字序列来找中问值。
中值滤波排序的过程有很多成熟的算法,如冒泡排序、⼆分排序等,⼤多是基于微机平台的软件算法,⽽适合硬件平台的排序算法则⽐较少。
3.FPGA硬件实现⽅法L(1,1) L(1,2) L(1,3)L(2,1) L(2,2) L(2,3)L(3,1) L(3,2) L(3,3)如上所⽰,为⼀个3x3的图像模板,第⼀步:分别对三⾏像素进⾏排序(例:由L11,L12,L13得到L1max,L1mid,L1min);第⼆步:分别对三⾏像素中的最⼤,中间和最⼩分别进⾏排序(例:由L1max,L2max,L3max得到Lmax_max,Lmax_mid,Lmax_min);第三步:对最⼤的最⼩,中间的中间以及最⼩的最⼤进⾏排序(例:由Lmax_min,Lmid_mid,Lmin_max得到midian);FPGA的算法实现步骤基本如此。

cic滤波器原理CIC滤波器原理CIC滤波器(Cascaded Integrator-Comb Filter)是一种数字滤波器,常用于数字信号处理中的滤波和抽取等应用。
它的设计简单、计算量小、延迟低,因此在很多领域得到了广泛应用。
CIC滤波器的原理基于积分器和组合器的级联组合。
积分器可以对信号进行累加,而组合器则用于减小采样率。
通过级联多个积分器和组合器,可以实现对信号的滤波效果。
CIC滤波器的结构包括三个主要部分:差分积分器、组合器和延迟线。
差分积分器主要由差分器和积分器组成,用于对输入信号进行积分。
组合器则用于将多个积分器的输出进行组合,以减小采样率。
延迟线则用于延迟信号,使得输入和输出的采样率可以不一致。
CIC滤波器的工作原理可以分为两个阶段:累加阶段和抽取阶段。
在累加阶段,输入信号经过差分积分器进行累加,积分的次数由滤波器的阶数确定。
在抽取阶段,经过积分之后的信号经过组合器进行抽取,抽取的倍数由滤波器的阶数和组合器的结构确定。
通过这样的级联结构,CIC滤波器可以实现对信号的滤波和抽取。
CIC滤波器的优点之一是其简单的结构和计算量小。
由于CIC滤波器的核心是积分和差分运算,这些运算在数字信号处理中是非常常见和简单的。
因此,CIC滤波器的实现相对容易,计算量也较小,适合于嵌入式系统等资源有限的环境。
另一个优点是CIC滤波器的延迟较低。
由于CIC滤波器的结构简单,信号只需经过几个积分和差分运算,因此滤波器的延迟较小。
这使得CIC滤波器在实时应用中具有较大的优势,如音频处理、视频处理等。
然而,CIC滤波器也存在一些缺点。
由于积分的操作会引入带宽扩展,CIC滤波器在滤波过程中会引入一定的失真。
为了降低失真,可以增加滤波器的阶数,但这也会增加计算量和延迟。
因此,在设计CIC滤波器时,需要权衡滤波性能、计算量和延迟等因素。
总的来说,CIC滤波器是一种简单且有效的数字滤波器,具有计算量小、延迟低等优点。

课程设计(论文)说明书题目:CIC滤波器设计院(系):信息与通信学院专业:学生姓名:学号:年月日摘要在数字下变频(DDC)中,CIC ( 级联积分梳状)滤波器起着重要的作用。
它主要用于采样速率的抽取,同时具有低通滤波的作用。
CIC 滤波器的主要特点是,仅利用加法器、减法器和寄存器( 无需乘法器) ,因此占用资源少、实现简单且速度高。
关键词:数字下变频; CIC 抽取滤波器AbstactThe filter of cascaded integr at or comb is becoming more important in the application of digital down converter (DDC) . Firstly , it is used to decimate the sample frequency.Secondly, it can be used as a low pass filter. The CIC filter is a flexible, multiplier-free filter which includes adders,subtracters and registers , so it uses less resorces and can play well in higher frequency . Based on the theory of CIC filter,Key words: DDC; the decim at ion filt er of CIC前言在软件无线电中, 数字下变频器接收经过高速采样的中频数字信号, 将所需的频带下变到基带。
它一般位于信号处理链的前端, 靠近A/ D。
它主要由数字振荡器、数字乘法器、数字滤波器三部分组成。
DDC 中数字滤波器的主要作用是抽取、低通滤波, 一般由FIR 滤波器实现。
但FIR 滤波器需要大量的乘法器, 且一般DDC 中的采样速率很高, 因此FIR滤波器需要工作在很高的频率, 使用资源多、功耗大。
CIC(Cascaded Integrator-Comb)滤波器是一种数字滤波器,主要用于对离散时间信号进行滤波和降采样。
它通常用于数字信号处理中,特别是在通信系统中的数据处理和信号重构过程中。
CIC滤波器由级联的积分器和组合器构成,其原理简单但功能强大,能够在不引入相位失真的情况下对信号进行有效滤波。
CIC滤波器的原理主要基于积分器和组合器的级联作用,通过这种结构能够实现对信号的高效滤波和降采样。
CIC滤波器的工作流程可以简述如下:1. 输入信号经过第一级积分器进行积分处理,然后经过第一级组合器进行组合处理,从而实现信号的初步滤波和降采样。
2. 经过初步处理的信号再次进入下一级积分器进行积分处理,然后再经过下一级组合器进行组合处理,如此循环至最后一级组合器。
3. 最后经过最后一个组合器的处理后,得到最终的信号输出结果。
在CIC滤波器的工作过程中,积分器起到对输入信号进行积分的作用,从而实现对信号频谱的滤波;而组合器则主要起到对积分器输出进行组合和降采样的作用。
通过这种积分和组合的级联作用,CIC滤波器能够实现对信号的高效滤波和降采样,同时又能够避免引入相位失真。
CIC滤波器的数学公式主要包括积分器和组合器的数学模型以及整个CIC滤波器的传递函数。
在理论推导和实际应用中,这些数学公式对于分析和设计CIC滤波器起到了重要的作用。
积分器的数学公式可以表示为:\[ H(z) = \frac{1 - z^{-M}}{1 - z^{-1}} \]其中,\(H(z)\)为数字积分器的传递函数,\(M\)为积分器的积分比率。
组合器的数学公式可以表示为:\[ H(z) = (1 - z^{-D})^N \]其中,\(H(z)\)为数字组合器的传递函数,\(N\)为组合器的组合比率,\(D\)为组合器的延迟量。
CIC滤波器的整体传递函数可以表示为:\[ H(z) = H_1(z) \cdot H_2(z) \cdot \ldots \cdot H_n(z) \]其中,\(H(z)\)为CIC滤波器的整体传递函数,\(H_i(z)\)为第\(i\)级CIC滤波器的传递函数。
基于FPGA的FIR数字滤波器的设计和实现摘要:本文基于FPGA平台实现了一种FIR数字滤波器,通过对滤波器的设计与实现过程的详细介绍,展示了FPGA在数字滤波器中的应用优势。
首先介绍了数字滤波器的原理及其在信号处理中的重要性,并对FPGA及其特点进行了概述。
接着,详细介绍了FIR滤波器的原理以及其在FPGA上的实现步骤,分析了滤波器设计中需要考虑到的各种因素。
最后,通过实验验证了FPGA上实现的FIR滤波器的性能,并对优化策略进行了讨论。
关键词:FPGA,FIR滤波器,数字信号处理,性能优化1. 引言数字滤波器是现代信号处理的重要组成部分,通过选择性地传递或抑制输入信号的特定频率组成部分,对信号进行处理和改善。
FIR滤波器是数字滤波器中最常用的一种类型,具有线性相位特性、稳定性较强以及易于实现等优势。
而FPGA作为一种可编程逻辑器件,具有灵活性高、可重构性强等特点,成为实现数字滤波器的理想平台。
2. FIR滤波器的原理FIR滤波器是一种线性时不变系统,其输出仅和当前输入值以及过去若干个输入值有关。
该滤波器的输出可以通过输入信号的线性加权和来计算,其中,每个输入值的加权系数通过FIR 滤波器的系数来确定。
FIR滤波器的系数决定了它对不同频率分量的响应,从而实现了信号的滤波目的。
3. FIR滤波器在FPGA上的实现步骤(1)选择合适的FPGA平台和开发工具,如Xilinx FPGA平台和Vivado开发工具。
(2)根据所要设计的滤波器的需求,确定其采样频率、截止频率和滤波器类型等参数,并进行系统级设计。
(3)根据所选参数,设计FIR滤波器的传递函数,并确定滤波器的阶数和系数。
(4)通过数学运算或者通过滤波器设计软件生成滤波器的差分方程。
(5)根据生成的差分方程,使用HDL(HardwareDescription Language)进行滤波器的编写。
(6)进行FPGA的综合、布局与布线、下载与验证,完成滤波器的硬件实现。
cic filter算法CIC滤波器算法CIC(Cascaded Integrator-Comb)滤波器是一种数字滤波器,常用于数字信号处理领域。
它具有简单的结构和高效的运算特性,因此在很多应用中被广泛采用。
本文将介绍CIC滤波器算法的原理、应用和优缺点。
一、CIC滤波器原理CIC滤波器由积分器和组合器组成。
积分器将输入信号进行累加,而组合器则对积分器的输出进行差分操作。
这种累加和差分的结构使得CIC滤波器能够实现高效的信号处理。
CIC滤波器的基本原理是对输入信号进行多次积分和差分操作,从而实现对信号的滤波。
首先,输入信号经过一个积分器进行累加,得到累加结果。
然后,将累加结果经过一个组合器进行差分操作,得到差分结果。
通过多次级联这样的积分器和组合器,可以实现对输入信号的多次积分和差分操作,从而实现对输入信号的滤波。
二、CIC滤波器应用CIC滤波器在数字信号处理中有广泛的应用。
其中,最常见的应用是对信号进行抽取和插值。
CIC滤波器可以实现高效的抽取和插值操作,能够在不增加额外的延迟和失真的情况下改变信号的采样率。
这种特性使得CIC滤波器在通信系统、音频处理和图像处理等领域中得到了广泛的应用。
三、CIC滤波器优缺点CIC滤波器具有以下优点:1. 简单的结构:CIC滤波器只包含积分器和组合器,没有乘法器等复杂的运算单元,因此具有简单的结构和低的硬件成本。
2. 高效的运算:CIC滤波器的运算是通过累加和差分实现的,没有乘法运算,因此具有高效的运算特性。
3. 无需存储器:CIC滤波器不需要存储器来存储历史数据,因此不需要额外的存储器资源。
然而,CIC滤波器也存在一些缺点:1. 线性相位响应:CIC滤波器的相位响应是线性的,不能实现对信号的相位补偿。
这在某些应用中可能会造成问题。
2. 高通滤波特性:CIC滤波器的传输函数在低频段衰减较强,相当于一个高通滤波器。
这意味着在使用CIC滤波器时需要额外的低通滤波器来补偿。
一种改进型CIC抽取滤波器的实现方法谢海霞;孙志雄【摘要】针对传统CIC抽取滤波器处理宽带信号时,阻带衰减满足要求,通带衰减过大的问题,提出了一种改进CIC抽取器的设计方法;在分级抽取滤波器的基础上用锐化技术改善滤波器通阻带衰减,采用内插二阶多项补偿函数对通带进行额外补偿,使带内更平坦,并利用多相分解的方法降低了抽取滤波器采样率;仿真验证了改进型滤波器具有更好的通、阻带特性.最后在FPGA上实现这个改进型CIC滤波器的设计,并进行了时序仿真和综合验证.【期刊名称】《电子设计工程》【年(卷),期】2018(026)014【总页数】5页(P162-166)【关键词】CIC抽取滤波器;内插二阶多项式;多相分解;FPGA【作者】谢海霞;孙志雄【作者单位】海南热带海洋学院电子通信工程学院,海南三亚572022;海南热带海洋学院电子通信工程学院,海南三亚572022【正文语种】中文【中图分类】TN911.72数字上、下变频器所涉及的抽取和内插存在着混叠、镜频等问题,抽取、内插后如何分离出需要的信号,关键在于抽取前和内插后的抗混叠高效数字滤波器设计。
由于CIC滤波器结构只有乘法运算,便于提高实时性和简化硬件,故常用它作为抗混叠高效数字滤波器。
经典CIC抽取器一般用来处理窄带信号,而处理宽带信号时,幅频响应很不理想,满足带外衰减指标时,通带衰减过大,难以满足抗混叠性能要求。
因此,如何更好地增大滤波器的零点抑制同时又不影响其通带性能一直是CIC滤波器研究的热点[1-5]。
1 CIC抽取器的设计CIC抽取器结构简单,主要由积分部分、抽取部分和梳状部分组成[6]。
其结构如图1所示。
图1 单级CIC抽取滤波器框图式(1)为单级CIC抽取器传输函数。
由于单级CIC的过渡带的衰减性能不是很好,所以实际应用中,通常是由多个单级CIC滤波器级联方法来加大过渡带和阻带的衰减。
多级传输函数为式(2):其中,M为大于1的整数,称为抽取因子,决定了CIC的通带大小;K为级联数,对旁瓣抑制比起到加大作用。