SimuLink仿真卫星姿态控制
- 格式:pdf
- 大小:6.15 MB
- 文档页数:19
自动控制理论实验报告人:赵振根02020802班2008300597卫星三轴姿态飞轮控制系统设计一:概述1.1.坐标系选择与坐标变换在讨论卫星姿态时,首先要选定空间坐标系,不规定参考坐标系就无从描述卫星的姿态,至少要建立两个坐标系,一个是空间参考坐标系,一个是固连在卫星本体的星体坐标系。
在描述三轴稳定对地定向卫星的姿态运动时,一般以轨道坐标系为参考坐标系,还有星体坐标系。
(1) 轨道坐标系o o o O X Y Z -,原点位于卫星的质心O ,o OX 轴在轨道平面上与o OZ 轴垂直,与轨道速度方向一致,o OZ 轴指向地心,o OY 轴垂直于轨道平面并构成右手直角坐标系(2) 星体坐标系b b b O X Y Z -,原点位于卫星的质心O ,b OX ,b OY ,bOZ 固连在星体上,为卫星的三个惯性主轴。
其中b OX 为滚动轴,b OY为俯仰轴,OZ为偏航轴。
b1.2 飞轮控制系统在卫星三轴姿态控制中的应用与特点长寿命,高精度的三轴姿态稳定卫星,在轨道上正常工作时,普遍采用角动量交换装置作为姿态控制系统的执行机构。
与喷气推力器三轴姿态稳定系统相比,飞轮三轴姿态稳定系统具有多方面的有点:(1)飞轮可以给出较为精确地连续变化的控制力矩,可以进行线性控制,而喷气推力器只能作为非线性开关控制,因此轮控系统的精度比喷气推力器的精度高一个数量级,而姿态误差速率也比喷气控制小。
(2)飞轮所需要的能源是电能可以不断地通过太阳能电池在轨得到补充,因而适用于长寿命工作,喷气推力器需要消耗工质或燃料,在轨无法补充,因而寿命大大受限。
(3)轮控系统特别适用于克服周期性扰动。
(4)轮控系统能够避免热推力器对光学仪器的污染。
然而,轮控系统在具有以上优越性的同时,也存在两个主要问题,一是飞轮会发生速度饱和。
当飞轮朝着一个方向加速或偏转以克服某一方面的非周期性扰动时,飞轮终究要达到其最大允许转速。
二是由于转速部件的存在,特别是轴承寿命和可靠性受到限制。
基于Simulink实时工具的小卫星姿控物理仿真
王屹;裴蓓
【期刊名称】《机械设计与制造工程》
【年(卷),期】2011(040)015
【摘要】针对小卫星姿态控制系统的设计和研制需要,应用高精度单轴气浮台模拟小卫星在轨运行时的微重力、无摩擦的环境,借助Simulink模块库建立了实时控制系统软件模型,利用反作用飞轮、光纤陀螺、数显表、控制计算机等物理设备快速构建了简化的小卫星姿态控制仿真硬件系统,并进行了姿态控制物理仿真实验,实验结果表明,仿真系统具有较高的姿态指向精度和稳定度,能够达到小卫星姿态控制仿真要求.
【总页数】4页(P53-56)
【作者】王屹;裴蓓
【作者单位】长春职业技术学院工程技术分院,吉林长春130033;长春职业技术学院工程技术分院,吉林长春130033
【正文语种】中文
【中图分类】TP23
【相关文献】
1.基于SoPC的微小卫星姿轨控计算机设计与实现 [J], 康国华;夏青;成婧
2.小卫星姿控xPC半物理仿真系统设计 [J], 徐开;陈长青;关文翠;金光
3.一种基于新型智能模拟器的小卫星姿轨控测试系统 [J], 卢彦杰;姜鼎;宋明轩
4.基于SIMULINK的卫星姿控系统的仿真实现 [J], 余涌涛;梁加红
5.基于Simulink实时工具的小卫星姿控物理仿真 [J], 王屹;裴蓓
因版权原因,仅展示原文概要,查看原文内容请购买。
2006年第5期导弹与航天运载技术No.52006总第285期MISSILE AND SPACE VEHCILE Sum No.285文章编号:1004-7182(2006)05-0039-06基于Simulink的运载火箭姿态控制系统时域仿真软件开发杨云飞,叶诚敏(北京宇航系统工程研究所,北京,100076)摘要:运载火箭的时域仿真软件如果采用C语言开发、工作量庞大、周期长,Matlab包含仿真平台Simulink,它拥有丰富的函数模块库,无需单独开发界面,无需为实现积分算法而专门编写程序。
结合实例,介绍如何利用Simulink搭建火箭姿态控制系统时域仿真模型,其中重点分析如何采用S-function实现箭体模型,如何解决时变参数输入、多维微分方程计算、合理加快仿真速度等难题。
开发过程与开发结果充分表明,这种方式具有开发速度快、界面直观、通用性强等优点。
关键词:姿态控制;运载火箭;时域仿真中图分类号:V416文献标识码:ADevelopment of Software for Time Domain Simulation in Attitude Control System of Launch Vehicle Based on SimulinkY an g Yun fe i,Y ie Ch en gmin(Beijing Institute of Space System Engineering,Beijing,100076)Abstr act:It is burdensome and time-consuming to develop a software for time domain simulation of a launch vehicle by using C Language.Instead,The software Matlab provides a platform called Simulink where there are enrichment common function libraries.Neither does it need to develop alone an interface between man and machine,nor to develop special programs in order to perform the integral calculation.Based on an example.The development of software for time domain simulation of launch vehicles with Simulink is introduced.Especially,the problems such as building a model of attitude movement by using S-function,inputing time-varied parameters,solving multidimensional differential equations and accelerating the simulation processing is analyzed.It is shown that the development by Simulink is swift,universal and convenience for its friendly interface.Key Words:Attitude control;Launch vehicle;Time domain simulation收稿日期:2005-08-09197-作者简介:杨云飞(5),男,工程师,主要从事运载火箭的控制系统设计导弹与航天运载技术2006年401引言对于运载火箭姿态控制系统的设计,一个必不可少的步骤是进行时域仿真。
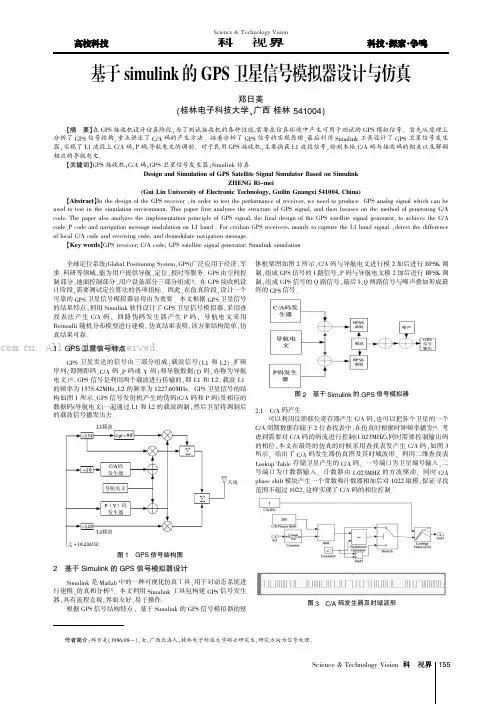
图1GPS信号结构图基于Simulink的GPS信号模拟器设计Simulink是Matlab中的一种可视化仿真工具,用于对动态系统进行建模、仿真和分析[3]。
本文利用Simulink工具包构建GPS信号发生,具有流程直观,界面友好,易于操作。
根据GPS信号结构特点,基于Simulink的GPS信号模拟器的整图2基于Simulink的GPS信号模拟器C/A码产生可以利用反馈移位寄存器产生C/A码,也可以把各个卫星的一个周期数据存储于2位查找表中,在仿真时根据时钟频率播发[4]。
虑到需要对C/A码的码流进行控制(1.023MHZ),同时需要控制输出码的相位,本文在最终的仿真的时候采用查找表发产生C/A码,如图,给出了C/A码发生器仿真图及其时域波形,利用二维查找表Lookup Table存储卫星产生的C/A码,一号端口为卫星编号输入号端口为计数器输入。
计数器由1.023MHZ的方波驱动,同时phase shift模块产生一个常数和计数器相加后对1022取模,保证寻找范围不超过1022,这样实现了C/A码的相位控制。
图3C/A码发生器及时域波形作者简介:郑日美(1986.08—),女,广西北海人,桂林电子科技大学硕士研究生,研究方向为信号处理。
155Science&Technology Vision科技视界位寄存器的延迟数与卫星编号相关。
图4P码发生器及时域波形2.3导航电文数据码产生GPS的导航数据码的播发速度是50HZ bit,对于GPS接收的射频前端和数字中频,该数据码可以用Bernoulli随机分布模型来模拟[5],在Simulink仿真环境中可以直接调用Bernoulli模块直接产生随机序列。
2.4BPSK调制完成C/A码、P码和导航数据码等基带处理后需要对其进行BPSK调制。
BPSK调制时将基带单极性码(0,1)转换成双极性码(-1,1),然后将其乘上载波。
二进制单极性码转为双极性码的转换原理为:将输入左移1位后减1。


基于MATLABSimulink的GPS卫星导航仿真器设计摘要:本文首先介绍了GPS卫星定位的原理和算法,然后给出了GPS仿真器的Simulink建模实现方法,并对其定位精度进行了误差分析,仿真结果表明该仿真器定位精度与实际接收机相当,可以用来模拟真实的卫星定位,为综合导航系统的研制工作带来了便利。
关键词:GPS卫星导航Simulink建模动态仿真1 引言现代飞行器对导航系统有着越来越高的要求,尤其是长航时飞机对导航设备的精度、可靠性以及连续性都提出了全面的要求。
每种导航系统都有其固有的局限性,因此仅靠单一系统的导航设备独立使用难以完全满足这些要求。
于是,使用多种导航技术的综合导航系统逐渐进入人们的视线,并受到广泛关注。
由于飞行实验费用大,对于综合导航系统最初的算法验证和实验测试,往往无法进行飞行器搭载实验,因此国内外均采用实验室半物理仿真系统进行初期实验研究。
Simulink是一种针对动态系统进行建模、仿真和分析的工具,它被广泛应用于线性系统、非线性系统的建模和仿真,支持连续系统、离散系统或者两种混合的系统和多速率系统。
本文介绍了“大飞机”综合导航仿真系统中,基于MATLAB/Simulink开发的GPS仿真器的原理和设计过程。
2 仿真器的应用环境如图1所示,综合导航仿真系统由飞行、惯导、卫星导航、天文导航、大气数据仿真、无线电高度表、地形匹配导航等分系统仿真器加上显控系统构成。
本文述及的工作主要集中于综合导航仿真系统中卫星导航仿真器的设计及其Simulink建模实现。
飞行仿真器有手动操作和自动飞行两种控制模式,自动飞行模式下仿真器根据预设航线输出飞机实时位置、速度、加速度、姿态等参数;手动模式下通过外置手柄来模拟操作飞机完成起飞、爬升、平飞、姿态改变和降落等全过程,飞行仿真器根据手柄传感器的输出信息仿真计算输出飞机的飞行数据。
卫星导航仿真器接收来自飞行仿真器的输出作为飞机当前实际位置,进行定位解算。
三轴稳定卫星姿态确定及控制系统的研究一、本文概述随着航天技术的飞速发展,三轴稳定卫星已成为现代空间科技领域的重要组成部分。
这类卫星通过其精确的姿态确定及控制系统,实现了在太空环境中的稳定运行和高效工作。
本文旨在深入研究三轴稳定卫星的姿态确定及控制系统,探讨其工作原理、技术挑战以及优化策略,为未来的卫星设计与控制提供理论支持和实践指导。
本文首先将对三轴稳定卫星的基本概念和特点进行介绍,明确研究背景和目的。
随后,将详细分析卫星姿态确定的基本原理和方法,包括传感器技术、数据处理算法以及姿态估计理论等。
在此基础上,将探讨控制系统的设计原则和实现方式,包括姿态控制策略、执行机构选择以及控制算法优化等。
本文还将对三轴稳定卫星姿态确定及控制系统中的关键技术进行深入剖析,如姿态传感器误差补偿、控制算法鲁棒性增强以及卫星在轨自主定姿等。
将结合国内外相关研究成果,对现有的姿态确定及控制技术进行总结和评价,指出存在的问题和改进方向。
本文将提出一种优化的三轴稳定卫星姿态确定及控制系统设计方案,通过仿真实验和实地测试验证其有效性和可行性。
这一方案将为未来卫星的设计和制造提供有益的参考,推动航天技术的持续进步和发展。
二、三轴稳定卫星姿态确定原理三轴稳定卫星的姿态确定是其控制系统中的核心环节,它涉及到卫星在空间中的方向感知和姿态调整。
三轴稳定卫星的姿态确定原理主要基于惯性测量单元(IMU)和星敏感器(Star Tracker)等传感器的数据融合处理。
惯性测量单元(IMU)是卫星姿态确定的基础设备,它通过内部的陀螺仪和加速度计来测量卫星的角速度和加速度,进而推算出卫星的姿态变化。
然而,由于IMU的长期误差积累,单纯依赖IMU进行姿态确定无法满足长时间、高精度的要求。
因此,需要引入星敏感器(Star Tracker)等光学传感器进行辅助。
星敏感器通过拍摄星空图像,识别出已知的天体位置,进而解算出卫星的姿态。
这种方式的优点是精度高、误差积累小,但其缺点是受到观测条件的限制,例如在地球阴影区、太阳光照强烈等情况下,星敏感器可能无法正常工作。
卫星链路通信系统与SIMULINK仿真<上行链路)一、实验内容题目1题目内容:理解信源编码在数字通信系统中的作用,研究SCPC系统中PCM编码方式。
利用MATLAB/SIMULINK通信模块库提供的基本模块搭建、编写PCM信源编码/译码模块,完成语音信号的编码/译码过程。
通过参数设置,完成基本的运行调试,得到相关的运行结果,验证仿真过程的正确性。
1.实现框图图1PCM信源编码2.实验结果与分析图2接收端PCM 译码与发送端结果显示从图2我们可以看出,PCM 解调得到的信号和发送端信号是相同的频率,验证了PCM 调制的有效性和可靠性,但是解调得到的信号和原有信号相比出现了时延的情况,这也说明在通信过程中此类情况无避免。
题目2题目内容:了解SCPC 系统中信号调制/解调的实现机制。
利用MATLAB/SIMULINK 通信模块库提供的基本模块搭建、编写BPSK(QPSK>调制/解调模块,完成信号的调制/解调的过程,并输出调制/解调前后的星座图和频谱图。
1. 实现框图图3信号调制/解调过程2. 实验结果与分析Transmit Filter1Transmit Filter Modulator Baseband DemodulatorBaseband Discrete-TimeGenerator Channel图4发送地球站端QPSK调制后的星座图图5接收解调信号星座图从图4和图5中可以看出,信号经过调制解调并叠加噪声之后,接收信号的星座图出现了明显的抖动,出现了不同程度的相位模糊,在不同信噪比情况下,信噪比的值越大,星座图点的分布越集中,与发送端信号相比,误码率也越低,相反,信噪比越小,星座图点的分布越分散,误码率也越低。
题目3题目内容:掌握SCPC 系统中信道编码的实现过程,验证信道/译码在整个系统中的功能。
利用MATLAB/SIMULINK 通信模块库提供的基本模块搭建、编写信道卷积码编译/译码模块,在调制方式和相同信噪比条件下验证信道编码的性能,最后将发送信号与接收信号进行对比,计算误码率1.实现框图图6信道编译码模块2实验结果与分析通过实验结果我们知道,在相同信噪比情况下,卷积码编码方式得到的输出结果的误比特率在较低的水平,在引入高斯白噪声,利用QPSK 进行调制的情况下,接收信号与发送端信号相比,输出误比特率在10-4以下。
基金项目:大挠性多体结构卫星控制技术专题(11303010203)收稿日期:2003-09-18 第21卷 第4期计 算 机 仿 真2004年4月 文章编号:1006-9348(2004)04-0151-04SAR 星姿态控制实时仿真系统结构与实现朱承元,杨涤,翟坤(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)摘要:为了测试S AR 星星载计算机软件及硬件接口实时性能,该文基于dSPACE 实时系统设计了S AR 星姿态控制实时仿真系统。
介绍了该系统的硬件结构和S imulink 模型。
采用S imulink 和S tateflow 建立了该系统的RS232/RS422串行口通信接口模型。
仿真结果表明了S AR 星姿态控制实时仿真系统和串行口通信接口模型的正确性。
关键词:卫星;姿态控制系统;实时仿真;建模;串行口通信中图分类号:TP391.9 文献标识码:A1 引言dSPACE 实时系统是由德国dSPACE 公司开发的基于M AT LAB/S imulink/RT W 的控制系统开发及测试平台[1]。
该系统由硬件系统和软件系统两部分组成。
硬件系统包括各种处理器和I/O 接口等。
软件系统包括实时接口库RTI (Real-T ime Inter face )[2]和C ontrolDesk 测试软件[3]。
RTI 实现dSPACE 实时系统与S imulink 的无缝连接,用于控制系统实时接口建模和从S imulink 模型产生代码并下载到dSPACE 处理器;C ontrolDesk 实现对控制系统实时仿真的监控和测试。
尽管dSPACE 系统在国外已广泛应用于航空航天、汽车、机器人、工业控制等领域[4],但在国内才开展应用dSPACE 系统[1,5]。
本文为满足S AR 星星载计算机软硬件实时性能测试需要,应用dSPACE 实时系统,研究并设计了S AR 星姿态控制实时仿真系统,并取得了成功。
基于simulink的GPS卫星信号模拟器设计与仿真作者:郑日美来源:《科技视界》 2015年第23期郑日美(桂林电子科技大学,广西桂林 541004)【摘要】在GPS接收机设计仿真阶段,为了测试接收机的各种性能,需要在仿真环境中产生可用于测试的GPS模拟信号。
首先从原理上分析了GPS信号结构,重点讲述了C/A码的产生方法。
接着分析了GPS信号的实现原理,最后利用Simulink工具设计了GPS 卫星信号发生器,实现了L1波段上C/A码,P码,导航电文的调制。
对于民用GPS接收机,主要捕获L1波段信号,检测本地C/A码与接收码的相差以及解调相应的导航电文。
【关键词】GPS接收机;C/A码;GPS 卫星信号发生器;Simulink仿真全球定位系统(Global Positioning System,GPS)广泛应用于经济、军事、科研等领域,能为用户提供导航、定位、授时等服务。
GPS由空间控制部分、地面控制部分、用户设备部分三部分组成[1]。
在GPS接收机设计阶段,需要测试定位算法的各项指标。
因此,在仿真阶段,设计一个可靠的GPS卫星信号模拟器显得由为重要。
本文根据GPS卫星信号的结果特点,利用Simulink软件设计了GPS卫星信号模拟器,采用查找表法产生C/A码,四路伪码发生器产生P 码,导航电文采用Bernoulli 随机分布模型进行建模。
仿真结果表明,该方案结构简单,仿真结果可靠。
1 GPS卫星信号特点GPS 卫星发送的信号由三部分组成:载波信号(L1 和 L2)、扩频序列(即测距码,C/A 码、P 码或 Y 码)和导航数据(D 码,亦称为导航电文)[2]。
GPS 信号是利用两个载波进行传输的,即 L1 和 L2。
载波 L1 的频率为1575.42MHz,L2 的频率为1227.60MHz。
GPS卫星信号的结构如图1所示,GPS信号发射机产生的伪码(C/A码和P码)及相应的数据码(导航电文)一起通过L1和L2的载波调制,然后卫星将调制后的载波信号播发出去。