雷达(幻灯片)(6)(ARPA)PPT课件
- 格式:ppt
- 大小:3.54 MB
- 文档页数:51

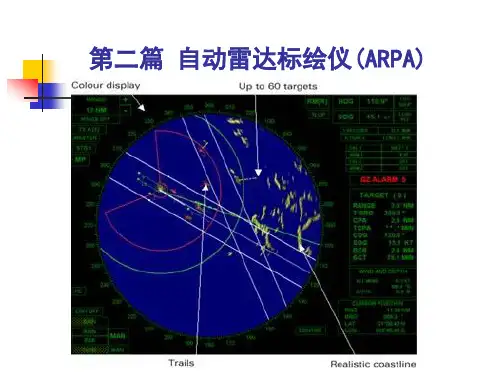
CPA : closest point of approach 最接近点,至CPA 的距离TCPA : time to CPA 到达CPA 的时间PPC : possible point of collision 可能碰撞点PAD : predicted area of danger 预测危险区VRM : variable range marker 可移动距标,活动距标EBL : electronic beaning line 电子方位线STC : sensitivity time control 海浪干扰抑制FTC : fast time constant 雨雪干扰抑制AFC : auto frequency control 自动频率控制IR/RIC : radar interence cancel 同频雷达干扰抑制1.测距原理:因为超高频无线电波在空间传播时具有等速,直线传播的特性,并且遇到物标有良好的反射性,记录雷达脉冲波离开雷达的时间t1和无线电脉冲遇到物标反射回到天线的时间t2,则物标距离天线的距离S 可由下式求的:T C T T C S ∆=-=2)(212 2.提高雷达的测距精度注意事项:1.正确调节显示器控制面板上的各控制按钮,使回波饱满清晰。
2.选择包含所测物标的合适量程,使物标回波显示于1/2~2/3量程处。
3.应定期将活动距标与固定距标进行比对,进行校准。
4.活动距标应和回波正确重合,即距标圈内缘与回波前沿相切。
5.尽可能选用短脉冲发射工作状态,以减少回波外侧扩大效应。
3.提高雷达的测方位精度注意事项:1.正确调节各控钮,使回波饱满清晰。
2.选择合适量程,使物标回波显示于1/2~2/3量程区域,并注意选择图像稳定显示方式(如“北向上”)。
3.调准中心,减少中心差。
实现应垂直屏幕观测,以减少视差。
4.检查船首线是否在正确的位置上。
应校准罗经复示器、主罗经及船首线所指航向值三者是否一致。