PLC步进电机控制技术
- 格式:doc
- 大小:749.50 KB
- 文档页数:9
步进电机的 PLC 控制方法 步进电机的 PLC 控制方法 一、引言 随着微电子技术和计算机技术的发展,可编程序控制器有 了突飞猛进的发展,其功能已远远超出了逻辑控制、顺序控制的范围,它与计 算机有效结合,可进行模拟量控制,具有远程通信功能等。有人将其称为现代 工业控制的三大支柱(即 PLC,机器人,CAD/CAM)之一。目前可编程序控 制器(Programmable Controller)简称 PLC 已广泛应用于冶金、矿业、机械、 轻工等领域,为工业自动化提供了有力的工具。 二、PLC 的基本结构 PLC 采用了典型的计算机结构,主要包括 CPU、RAM、ROM 和输入/输出接口 电路等。如果把 PLC 看作一个系统,该系统由输入变量-PLC-输出变量组成, 外部的各种开关信号、模拟信号、传感器检测的信号均作为 PLC 的输入变量, 它们经 PLC 外部端子输入到内部寄存器中,经 PLC 内部逻辑运算或其它各种 运算、处理后送到输出端子,它们是 PLC 的输出变量,由这些输出变量对外围 设备进行各种控制。 三、控制方法及研究 1、FP1 的特殊功能简介 (1) 脉冲输出 FP1 的输出端 Y7 可输出脉冲,脉冲频率可通过软件编程进 行调节,其输出频率范围为 360Hz~5kHz。 (2) 高速计数器(HSC) FP1 内部有高速计数器,可同时输入两路脉冲,最高计数频率为 10kHz,计数 范围-8388608~+8388607。 (3) 输入延时滤波 FP1 的输入端采用 输入延时滤波,可防止因开关机械抖动带来的不可靠性,其延时时间可根据需 要进行调节,调节范围为 1ms~128ms。 (4) 中断功能 FP1 的中断有 两种类型,一种是外部硬中断,一种是内部定时中断。 2、步进电机的速 度控制 FP1 有一条 SPD0 指令,该指令配合 HSC 和 Y7 的脉冲输出功能可 实现速度及位置控制。速度控制梯形图见图 1,控制方式参数见图 2,脉冲输
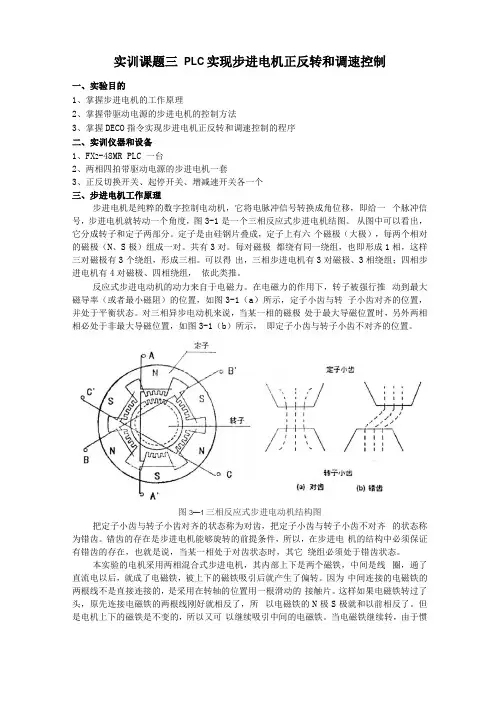
实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、FX2-48MR PLC 一台2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。
从图中可以看出,它分成转子和定子两部分。
定子是由硅钢片叠成,定子上有六个磁极(大极),每两个相对的磁极(N、S极)组成一对。
共有3对。
每对磁极都绕有同一绕组,也即形成1相,这样三对磁极有3个绕组,形成三相。
可以得出,三相步进电机有3对磁极、3相绕组;四相步进电机有4对磁极、四相绕组,依此类推。
反应式步进电动机的动力来自于电磁力。
在电磁力的作用下,转子被强行推动到最大磁导率(或者最小磁阻)的位置,如图3-1(a)所示,定子小齿与转子小齿对齐的位置,并处于平衡状态。
对三相异步电动机来说,当某一相的磁极处于最大导磁位置时,另外两相相必处于非最大导磁位置,如图3-1(b)所示,即定子小齿与转子小齿不对齐的位置。
图3—1三相反应式步进电动机结构图把定子小齿与转子小齿对齐的状态称为对齿,把定子小齿与转子小齿不对齐的状态称为错齿。
错齿的存在是步进电机能够旋转的前提条件,所以,在步进电机的结构中必须保证有错齿的存在,也就是说,当某一相处于对齿状态时,其它绕组必须处于错齿状态。
本实验的电机采用两相混合式步进电机,其内部上下是两个磁铁,中间是线圈,通了直流电以后,就成了电磁铁,被上下的磁铁吸引后就产生了偏转。
因为中间连接的电磁铁的两根线不是直接连接的,是采用在转轴的位置用一根滑动的接触片。
这样如果电磁铁转过了头,原先连接电磁铁的两根线刚好就相反了,所以电磁铁的N极S极就和以前相反了。
PLC步进电机控制实验报告引言在工业控制领域中,步进电机是一种常用的驱动设备。
为了实现对步进电机的精确控制,我们采用了PLC(可编程逻辑控制器)作为控制器。
本文将详细介绍PLC步进电机控制实验的步骤和结果。
实验目的本实验旨在通过PLC控制步进电机,实现对电机运动的精确控制。
具体实验目标如下: 1. 学习PLC的基本原理和编程方法; 2. 掌握步进电机的工作原理及其控制方法; 3. 设计并实施一个简单的步进电机控制系统。
实验设备本实验使用的设备包括: - PLC控制器 - 步进电机 - 电源 - 开关 - 传感器实验步骤步骤一:PLC编程1.打开PLC编程软件,并创建一个新的项目。
2.配置PLC的输入输出模块,并设置相应的IO口。
3.编写PLC的控制程序,实现对步进电机的控制逻辑。
4.调试程序,确保程序的正确性。
步骤二:步进电机的接线1.将步进电机的驱动器与PLC的输出模块连接。
2.将步进电机的电源与PLC的电源模块连接。
3.连接步进电机的传感器,以便监测电机的运动状态。
步骤三:实验验证1.通过PLC的编程软件,将编写好的程序下载到PLC控制器中。
2.打开PLC电源,确保PLC控制器正常工作。
3.通过PLC的输入模块输入控制信号,观察步进电机的运动情况。
4.通过传感器监测步进电机的运动状态,并与编写的控制程序进行比较。
实验结果通过本次实验,我们成功实现了对步进电机的精确控制。
控制程序的设计使步进电机按照预定的速度和方向运动,并且可以根据需要随时改变运动状态。
同时,通过传感器的监测,我们可以及时获取步进电机的运动信息,确保系统的稳定性和安全性。
实验总结本实验通过PLC控制步进电机,深入了解了PLC编程的基本原理和步进电机的工作原理。
通过实践,我们掌握了PLC编程的方法和步进电机控制的技巧。
在实际应用中,PLC控制步进电机具有广泛的应用前景,可以在自动化生产线、机械加工等领域中发挥重要作用。
参考文献[1] PLC步进电机控制实验教学单元.(2018)。
基于PLC的步进电机控制系统初探一、引言二、步进电机的工作原理步进电机是一种特殊的电动机,其运行原理是通过施加脉冲信号,使得电机按照一定的步进角度转动。
步进电机的运转是通过在电机的两相之间依次施加电压信号,使得电机按照一定的步进角度运转。
步进电机的步进角度决定了电机每次接受一个脉冲信号后转动的角度,通常步进电机的步进角度为1.8°。
步进电机的转速和转向可以通过改变脉冲信号序列的频率和方向来实现。
由于步进电机的运转是按照脉冲信号的输入来控制的,因此可以实现对电机的精确位置控制。
三、步进电机的控制方式步进电机的控制方式有很多种,主要包括开环控制和闭环控制两种方式。
1. 开环控制开环控制是最基本的步进电机控制方式,其工作原理是根据电机接收到的脉冲信号的数量和频率,来确定电机转动的速度和方向。
开环控制方式简单易于实现,成本较低,但是对于电机的控制精度和稳定性要求较高的场合,开环控制方式往往无法满足要求。
2. 闭环控制闭环控制是在开环控制的基础上增加了反馈系统,通过对电机的位置、速度等参数进行监测和反馈控制,实现对电机的精确控制。
闭环控制方式可以提高电机的控制精度和稳定性,但相对于开环控制方式来说,成本和复杂度都要高很多。
1. PLC对步进电机控制系统的优势(1)可编程性:PLC可以根据控制要求编写程序,灵活性强,能够适应不同的控制需求。
(2)稳定性:PLC具有可靠性高、稳定性好的特点,可以保证步进电机的运行稳定。
(3)易维护性:PLC控制系统具有模块化的特点,易于维护和维修。
2. 基于PLC的步进电机控制系统的实现基于PLC的步进电机控制系统通常由PLC主控模块、步进电机驱动模块、输入/输出模块、人机界面等部分组成。
PLC主控模块通过编写控制程序,实现对步进电机的控制和监测;步进电机驱动模块负责接收PLC发送的脉冲信号,控制步进电机的运转;输入/输出模块用于接收外部信号并将其送入PLC中进行处理;人机界面用于监测和操作步进电机控制系统。
PLC控制步进电机基于PLC的步进电机运动控制一、步进电机工作原理1. 步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单2. 步进电机的运转原理及结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A‘与齿5相对齐,(A‘就是A,齿5就是齿1)3. 旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力,以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
步进电机的静态指标术语拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
毕业设计(论文)报告题目基于PLC的步进电机的控制基于PLC的步进电机的控制摘要:小型PLC在编程,I/O扩展,通讯接口,开关量和模拟量的调节以及一些特殊功能模块如高速计数输入和脉冲输出的应用上已经基本满足用户的需求了。
但随着应用需求及关联产品技术性能的提升,PLC将继续得已完善和发展.本文主要论述了步进电机的原理及驱动方法,并在S7—200 PLC的基础上,对步进电机进行控制.本设计选用PLC控制两相混合式步进电机,在PLC编程的基础上用按钮开关控制步进电机的启动、正转、反转等基本功能。
关键词:S7-200 PLC、两相混合式步进电机、PLC编程Control of stepping motor based on PLCAbstract:In the field of programming, I/O expansion,Communication interface, adjustments of switches and simulation and some special function modules such as the application of high speed pulse input and output, the PLC has already met demands of users。
But the PLC will continue to improve and develop, as the development of application requirements and related technical performance。
This article chiefly discusses the principle and driven approach of the stepping motor,and how to control it based on the S7—200 PLC。
PLC在步进电机控制中的应用探究
PLC(Programmable Logic Controller)是一种用于控制工业自动化系统的计算机,可以编程实现各种逻辑控制功能。
步进电机是一种特殊的电机,其转子按照一定的角度步进运动,通常用于需要精确位置控制的系统中。
PLC在步进电机控制中具有广泛应用,主要体现在以下几个方面:
1. 位置控制:步进电机通过每次步进的角度来确定位置,PLC可以通过编程实现对步进电机的位置控制。
通过读取传感器的信号,PLC可以确定步进电机的当前位置,并根据需要发送脉冲信号,控制步进电机运动到指定的位置。
这种位置控制能力使得步进电机广泛用于自动化输送线和装配线等需要精确定位的场合。
2. 速度控制:除了位置控制,PLC还可以实现对步进电机的速度控制。
通过调整脉冲信号的频率,PLC可以控制步进电机每分钟旋转的圈数,从而控制步进电机的速度。
这种速度控制能力使得步进电机广泛应用于注塑机、纺织机械和数控机床等对转速要求较高的设备中。
PLC在步进电机控制中的应用具有重要的意义。
通过编程实现对步进电机的位置、速度和运动的控制,PLC可以提高自动化生产线的生产效率和精度,适用于各种自动化设备的控制需求。
随着PLC技术的不断发展和创新,相信PLC在步进电机控制中的应用前景将更加广阔。
PLC实现步进电机的正反转和调整控制PLC(可编程逻辑控制器)是一种电子设备,用于控制工业自动化系统中的运动和操作。
步进电机是一种常用的驱动器,它的旋转运动是通过一步一步地前进来实现的。
本文将探讨如何使用PLC来实现步进电机的正反转和调整控制。
步进电机的正反转控制是通过改变电机绕组的相序来实现的。
在PLC 中,我们可以使用输出模块来控制电机的相序。
以下是步骤:1.配置PLC硬件:在PLC中插入输出模块,并与电机的各个相连接。
确保正确连接。
2.编程PLC:使用PLC编程软件,编写一个控制程序来实现电机的正反转。
首先,定义输出模块的输出信号来控制电机。
然后使用程序语言来编写逻辑控制指令,根据需要来改变输出信号的状态。
为了实现正反转,需要改变输出信号的相序。
3.实现正反转控制:在编程中,定义一个变量来控制步进电机的运动方向。
当变量为正值时,电机正转;当变量为负值时,电机反转。
根据变量的值来改变输出模块的输出信号,以改变电机的相序。
4.运行程序:将PLC连接到电源,并加载程序到PLC中。
启动PLC,程序将开始运行。
通过改变变量的值,我们可以控制电机的正反转。
除了控制步进电机的正反转,PLC还可以实现步进电机的调整控制。
调整控制是通过改变电机的步距和速度来实现的。
以下是步骤:1.配置PLC硬件:在PLC中插入输出模块,并与电机的各个相连接。
与正反转控制相同,确保正确连接。
2.编程PLC:使用PLC编程软件编写控制程序。
首先,定义输出模块的输出信号来控制电机的相序。
然后,使用程序语言来编写逻辑控制指令,根据需要改变输出信号的状态。
为了实现调整控制,需要改变输出信号的频率和占空比。
3.实现调整控制:在编程中,定义两个变量来控制电机的步距和速度。
步距变量控制电机每一步的距离,速度变量控制电机的旋转速度。
根据变量的值来改变输出模块的输出信号,以改变电机的相序,并控制步距和速度。
4.运行程序:将PLC连接到电源,并加载程序到PLC中。
PLC实现步进电机的正反转及调整控制PLC(可编程逻辑控制器)可以广泛应用于工业自动化控制系统中,包括步进电机的正反转及调整控制。
本文将详细介绍如何使用PLC实现步进电机的正反转及调整控制。
一、步进电机的原理步进电机是一种用电脉冲驱动的电动机,它是按固定顺序将电流导通到电动机的相绕组中,从而使电动机按步进的方式转动。
步进电机有两种基本的工作模式:全步进和半步进。
在全步进模式下,电机每接收到一个脉冲就向前转动一个固定的步距角度。
在半步进模式下,电机接收到一个脉冲时向前转动半个步距角度。
二、PLC实现步进电机的正反转1.硬件连接将PLC的输出端口与步进电机的驱动器相连,将驱动器的控制信号输出口与步进电机相连。
确保电源连接正确,驱动器的供电电压要符合步进电机的额定电压。
2.编写PLC程序使用PLC编程软件编写PLC程序来控制步进电机的正反转。
以下是一个简单的PLC程序示例:```BEGINMOTOR_CONTROL_TRIG:=FALSE;//步进电机控制信号MOTOR_DIRECTION:=FORWARD;//步进电机转动方向,FORWARD表示正转,REVERSE表示反转//步进电机正转控制MOTOR_FORWARD:IF(START_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=FORWARD;END_IF;//步进电机反转控制MOTOR_REVERSE:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=REVERSE;END_IF;//步进电机停止控制MOTOR_STOP:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=FALSE;END_IF;END```Begitalogic Flowcode是PLC编程软件之一,提供了简单易懂的图形界面来编写PLC程序。
摘要对可编程序控制器的步进电机控制系统进行设计,阐明了可编程序控制器及步进电机的结构和工作原理,同时给出了可编程序控制器控制步进电机电气控制系统的硬件组成和软件设计,包括可编程序控制器输入输出接线图、梯形图、程序设计和步进电机的驱动电路。
提出基于PLC的四相八拍步进电机控制的方案,介绍了控制系统的设计方案及其软硬件的实现方法,实现对四相步进电机的启动,停止控制、正反转控制。
方法简单易行,编程容易,可靠性高。
关键字:步进电动机 PLC 梯形图驱动电路目录1 引言 (4)2课题分析 (4)2.1 任务分析 (4)2.2 方案设计 (4)3 反应式步进电机 (6)3.1 步进电机的结构 (6)3.2 步进电机的工作原理 (7)4 可编程器件FX2N-32MR (8)4.1 FX2N-32MR的结构 (8)4.2 FX2N-32MR的工作原理 (8)5 硬件设计 (8)5.1 I/O端口 (8)5.2 I/O端子连接线 (9)5.3 驱动电路 (10)6 软件设计 (11)6.1 PLC控制步进电机控制方法 (11)6.2 梯形图 (12)7 调试 (14)7.1 硬件调试 (14)7.2 软件调试 (15)7.3 运行调试 (15)8 结论 (15)9 心得体会 (15)参考文献 (16)1.引言随着微处理器、计算机和数字通信技术的发展,计算机控制已经广泛地应用在所有的工业领域。
现代社会要求制造业对市场做出迅速的反应,生产设备和自动生产线的控制系统必须具有较高的可靠性和灵活性,可编程器件正是顺应这个要求,PLC已广泛应用各种机械设备和生产过程的自动化控制系统中。
步进电机是一种控制精度极高的电机。
在PLC步进电动机的控制系统中,输入到步进电动机绕组中的脉冲数或频率可以控制步进电动机的角位移和转速,在给步进电动机的各绕组输入脉冲时需要应用脉冲分配器分配脉冲。
2.课题分析2.1 任务分析步进电动机是一种将电脉冲信号转换成直线位移或角位移的执行元件。
基于PLC的步进电机控制技术随着经济的快速发展和科技的快速进步,从一定意义上推动了我国步进电机的发展进步。
步进电机作为一项特殊的先进设备,其适应范围广泛,凭借着自身的技术优势,为众多行业领域作出了不可估量的贡献。
而PLC作为一种控制装置,依靠其自身的网络技术、技术处理等优势能有效控制步进电机,让步进电机的价值发挥到最佳状态。
本文阐述步进电机控制技术的工作原理和特性,并分析PLC步进电机控制技术原理和挑战,以为步进电机的发展提供理论基础。
标签:PLC;步进电机;控制技术毋庸置疑,在计算机技术的发展带动下,步进电机产生的控制功能无疑被高度青睐,为自动化系统的发展带来了新盛景。
步进电机的转子惯量低、操作误差小等优点,为其在部分领域中的地位提供了支撑后盾。
PLC在众多控制装置中最深得步进电机的心,两者的有机融合已成为众多行业中的控制领域的不二之选,其发展潜能极大。
同时,PLC的性价比优势也更具一层,这就确保了PLC的步进电机控制技术的广泛应用的有效性。
故此,相关技术人员应充分了解两者融合的理论基础,并放置到实践中,实现控制技术的大进步。
一、步进电机控制技术的工作原理步进电机的控制原理主要依赖电脉冲信号来完成,在控制过程中,把电脉冲信号转换成相应的角位移或直线位移。
在电脉冲的控制的影响下,步进电机的角位移量和速度会与输入脉冲的数量及频率形成正比,以达到相应的控制效果,确保实现步进电机在控制中的有效精准定位的目的。
同时,步进电机转动的速度和加速度的控制,主要是依靠脉冲频率来实现有效控制,以保证运作过程中能进行实时调速。
另外,在通电的顺序上稍作改动,步进电机的旋转方向就能够被有效改变,进而实现步进电机的灵活控制。
二、步进电机控制技术的特性阐述常见的步进电机的分类主要分为以下三类:反应式步进电机、永磁性步进电机、混合式步进电机等[1]。
除了此种按照结构划分的方式,步进电机亦还有其他的分类方法。
然而,不管是哪种依据划分的步进电机种类,其控制技术的特性基本上都包含以下七大方面。
P L C控制技术课程设计说明书题目:学院:专业:班级:学生姓名: 学号:指导教师:2016年6 月7日内容摘要本文主要是介绍采用可编程控制器(PLC) 对五相十拍步进电机进行控制的设计原理及方法进行分析.其中步进电动机具有快速起停、精确步进和定位等特点,是一种控制精度极高的电机,常用作工业过程控制及仪器仪表的控制元件。
可编程控制器是工业自动化设备的主导产品,具有控制功能强,可靠性高,适用于不同控制要求的各种控制对象等优点。
本文详细的介绍了用PLC控制步进电机系统的原理,及硬件和软件设计方法。
其内容主要包括I/O地址分配、PIC外部接线图、控制流程图、主电路图、梯形图、元件清单以及语句表。
本文设计过程中使用了十六位移位寄存器,大大简化了程序的设计,使程序更间凑,方便了设计。
在实际应用中表明此设计是合理有效的。
关键词: PLC,五相十拍步进电机,梯形图引言步进电动机是一种控制精度极高的电动机,在工业上有着广泛的应用。
步进电动机具有快速起停、精确步进和定位等特点,所以常用作工业过程控制及仪器仪表的控制元件。
基于PLC控制的步进电动机具有设计简单,实现方便,参数设计置灵活等优点.矩角特性是步进电机运行时一个很重要的参数,矩角特性好,步进电机启动转矩就大,运行不易失步.改善矩角特性一般通过增加步进电机的运行拍数来实现。
本文主要是介绍采用可编程控制器(PLC) 对五相十拍步进电机进行控制的设计原理及方法进行分析。
本文详细的介绍了用PLC控制步进电机系统的原理,及硬件和软件设计方法。
其内容主要包括I/O地址分配、PIC外部接线图、控制流程图、梯形图以及语句表。
本文设计过程中使用了十六位移位寄存器,大大简化了程序的设计,使程序更间凑,方便了设计.在实际应用中表明此设计是合理有效的对五相十拍步进电机的控制,主要分为两个方面:五相绕组的接通及断开顺序控制。
正转顺序:ABC→BC→BCD→CD→CDE→DE→DEA→EA→EAB→AB 反转顺序:ABC←BC←BCD←CD←CDE←DE←DEA←EA←EAB←AB以及每个步距角的行进速度.围绕这两个主要方面,可提出具体的控制要求如下:1、可正转或反转;2、运行过程中,步进三种速度可分为高速(0.05S),中速(0。
基于PLC的步进电机控制系统初探随着科技的不断发展,自动化控制系统在各个领域中的应用越来越广泛。
基于PLC(可编程逻辑控制器)的步进电机控制系统被广泛应用于工业自动化领域。
本文将对这一控制系统进行初步探究。
我们需要了解什么是PLC。
PLC是一种用于工业自动化控制的计算机控制系统。
它通过组合逻辑、计数器、定时器和数据处理等功能单元来实现控制功能。
PLC由CPU(中央处理器)、输入模块、输出模块和通信接口组成。
它具有良好的稳定性和可靠性,并且可以根据需要进行编程和配置。
步进电机是一种将电脉冲信号转变为递进式旋转运动的电动机。
它通过逐个脉冲信号驱动电机转动,从而实现精确的位置控制。
步进电机具有结构简单、控制方便和运动精度高等优点,因此被广泛应用于自动控制系统中。
基于PLC的步进电机控制系统利用PLC的强大功能来实现电机的控制。
我们需要通过输入模块将外部信号输入到PLC中。
这些外部信号可以是开关信号、传感器信号等。
然后,PLC通过CPU对这些信号进行处理和判断,并根据预先编写的程序来生成相应的输出信号。
输出模块将这些信号传递给步进电机驱动器,从而控制电机的运动。
在编写PLC程序时,我们需要定义电机的运动方式和运动参数。
运动方式可以是正转、反转、单步运动等。
运动参数包括步进角度、加速度、减速度等。
根据实际需求可以自行设置。
在程序编写完成后,我们需要将程序下载到PLC的内部存储器中,并通过通信接口将其与外部设备连接。
除了基本的运动控制功能,基于PLC的步进电机控制系统还可以实现更复杂的功能。
可以通过编写不同的程序,实现电机的位置控制、速度控制、力控制等。
还可以通过与其他设备的配合,实现自动化生产线的控制。
基于PLC的步进电机控制系统是一种应用广泛且功能强大的自动化控制系统。
它通过PLC对输入信号进行处理,并生成相应的输出信号来实现对步进电机的控制。
该系统具有操作简便、运动精度高等优点,并可以根据实际需求进行扩展和优化。
PLC 对步进电机的控制技术殷华文 于兆和 马志刚南阳理工学院电子与电气工程系,河南南阳 473004摘要:详细介绍了P LC 对步进电机的控制方法和编程技术,包括控制坐标系的建立、单双轴控制、接线、控制参数计算和控制程序的编写等。
关键词:PL C;步进电机;控制坐标系中图分类号:T P273 文献标识码:B 文章编号:1001-2265(2003)08-0065-03The technology of PLC controlling stepping motorYIN Huaw en YU Zhaohe M A ZhigangAbstract:T his paper introduces the controlling met hod and programming technolo gy of PL C contro lling stepping motor in detail,including setting up the control coordinate system ,sing le and double ax is control,w iring,calculating control parameters and de signing control program.Key words:PLC;Stepping motor ;Control coordinate system图1 WD3-007型步进电机驱动器的控制面板图2 PLC 输出电路结构1 引言步进电机是一种将电脉冲信号变换成相应的角位移或直线位移的机电执行元件,每当对其施加一个电脉冲时,其输出轴便转过一个固定的角度,称为一步,当供给连续脉冲时,就能一步一步地连续转动。
步进电机分为反应式、永磁式和混合式等。
步进电机的位移量与输入脉冲数严格成正比,其转速与脉冲频率和步进角有关。
步进电机必须使用专用的步进电机驱动设备才能够正常工作,步进电机系统的运行性能,除与电机自身的性能有关外,在很大程度上还取决于驱动器性能的优劣。
机械设计制造及其自动化专业实验
——机电控制实验
步进电机控制技术综合实验
————可编程控制器控制十字滑台的速度、位置
实验指导书
重庆理工大学
重庆汽车学院
实践教学及技能培训中心
2011年3月
学生实验守则
1.学生应按照实验教学计划和约定的时间,准时上实验课,不得迟到早退。
2.实验前认真阅读实验指导书,明确实验目的、步骤、原理,预习有关的理论知识,并接受实验教师的提问和检查。
3.进入实验室必须遵守实验室的规章制度。
不得高声喧哗和打闹,不准抽烟、随地吐痰和乱丢杂物。
4.做实验时必须严格遵守仪器设备的操作规程,爱护仪器设备,服从实验教师和技术人员指导。
未经许可不得动用与本实验无关的仪器设备及其它物品。
5.实验中要细心观察,认真记录各种试验数据。
不准敷衍,不准抄袭别组数据,不得擅自离开操作岗位。
6.实验时必须注意安全,防止人身和设备事故的发生。
若出现事故,应立即切断电源,及时向指导教师报告,并保护现场,不得自行处理。
7.实验完毕,应主动清理实验现场。
经指导教师检查仪器设备、工具、材料和实验记录后方可离开。
8.实验后要认真完成实验报告,包括分析结果、处理数据、绘制曲线及图表。
在规定时间内交指导教师批改。
9.在实验过程中,由于不慎造成仪器设备、器皿、工具损坏者,应写出损坏情况报告,并接受检查,由领导根据情况进行处理。
10.凡违反操作规程,擅自动用与本实验无关的仪器设备、私自拆卸仪器而造成事故和损失的,肇事者必须写出书面检查,视情节轻重和认识程度,按学院有关规定予以赔偿。
重庆理工大学
说明
1.同学可以登录学校的“实验选课系统”(从学校首页登陆:
或从数字校园登录),自己进行实验项目的选择。
希望同学们能在每个实验项目开放的时间内尽早进行实验预约(预约时间必须比实验上课时间提前3天),因为学生数量比较多,如果某实验项目开放的时间内同学未能进行实验预约,则错过该实验项目的实验机会,补做就要在该实验项目下一次开放时进行。
2.如有什么问题,同学可以拨打电话62563127联系李鑫老师。
一、实验目的:
1、通过本实验提高学生对自动化控制的理解,同时锻炼学生的动手和实践能力。
2、熟悉控制步进电机的控制及其工作原理。
3、通过实验掌握步进电机的各个参数及其意义。
4、熟悉PLC 的基本控制指令,并能够读懂一些基本的PLC 程序(梯形图),从而熟悉并掌握PLC 的基本编程技巧。
二、实验设备
1、十字滑台(带步进电机 α=1.8°)(X/Y 每轴左右端各1个接近开关,每轴并联安装)
2、PLC 模块(EMERSON EC20H-1616BTA4)
3、转速计一台
4、计算机一台
5、多功能电源板
三、实验要求:
1、能够实现以下工作循环过程(全自动单周期)如下图:
2、利用行程开关实现极限位置保护功能(即滑块触到极位开关就停止运行)
三、实验仪器简介:
〈一〉、步进电机概述: 1、步进电机是一种将电脉冲信号转换成机械角位移的机电执行元件。
当有脉冲信号输入时,步电机就一步一步的转动,每个输入脉冲对应电机的一个固定转角(步距角),故称为步进电机。
步进电机属于同步电机,多数情况用做开环控制电机,其控制简单,工作可靠,能够得到较高的精度。
它是唯一能够以开环结构用于数控机床的电动机。
2、步进电机按其励磁相数可分为三相、四相、五相、六相等;按其工作原理可分为反应式、永磁式和混合式三大类。
3、步进电机的基本特点:
〈1〉步进电机受电脉冲信号的控制。
每输入一个脉冲信号,就变换一次绕组的通电状态,电机就相应的转动一步,因此电机的总回转角与输入脉冲个数严格成正比关系,电机的转速则正比于输入脉冲的频率。
改变步进电机的定子绕组的通电顺序,可以获得所需要的转向。
改变输入脉冲频率,则可以得到所需要的转速(注意:不能超出步进电机的极限频率)。
行程
快进
工进
快退
速度
〈2〉当步进电机脉冲输入停止时,只要维持绕组的激励电流不变,电机保持在原固定位置上,因此可以获得较高的定位精度,不需要安装机械制动装置从而达到精确制动。
〈3〉误差不长期积累,转角精度高。
由于每转过360°后,转子的累积误差为零,转角精度较高。
〈4〉反映时间快。
〈5〉缺点:步进电机的效率低,没有过载能力。
4、步距角的大小和通电方式、转子齿数、定子励磁绕组的相数的关系:(本实验α=1.8°)
α=360°/mZK
m——步进电机的相数;
Z——转子齿数;
K——通电方式系数。
相邻两次通电,相的数目相同K=1;相邻两次通电,相的数目不同K=2。
5、步进电机驱动器,请参考《机床电气自动控制》(重庆大学出版社陈远龄主编)
〈二〉滑台的概述(如下图所示)
步进电机丝杆导轨
由图可知,此滑台由步进电机、滑块、滚动丝杆、等组成。
其中丝杆的参数:
螺距(单位mm):
有效行程(单位mm):L=丝杆长度-工作台长度
使用滑台时应注意:
当滑台运动到两端尽头时,应该立即停止,否则容易引起步进电机或者是步进电机驱动器烧坏。
因为这时步进电机有很大的负载,根据步进电机负载特性可知,步进电机的负载能力很差,所以容易烧坏。
〈三〉可编程控制器的概述:
可编程控制器(PLC)是在继电器控制和计算机控制基础上发展起来的新型工业自动控制装置。
因此,PLC实际上就是一种工业控制微机,因而它的硬件结构与一般微机控制系统相似,其主体由微处理器(CPU)、存储器、输入模块、输出模块、电源及编程器组件构成。
本实验所用的PLC是艾默生公司的EC20H系统。
使用该模块时注意以下事项:
1、在供电时不要撤卸任何单元,这样可能导致电击;
2、供电时不要触及任一端子或端子板,这样可能导致电击;
3、在传送程序给其它节点时,或在对I/O存储器进行改变时,在传送前要确认目的节点的
4、连结导线时一定要按要求进行,否则将烧坏元件。
〈四〉、行程开关的简介
红——常开触点的一端;
蓝——常开触点的另一端;。
工作原理:
当工作台触及行程开关或者靠近它时,常开触点闭合,PLC接收闭合信号,控制执行机构停止运动,从而达到零位保护、极限位置保护、行程控制等等的作用。
行程开关不仅仅反应灵敏,而且价格低廉,精度高。
四、实验原理:
利用PLC的高速脉冲输出功能实现对步进电机的启停、方向、速度、运动距离(步数)的控制。
实验步骤:
1、熟悉PLC实验模块、多功能实验模块、十字滑台和行程开关,掌握其正确使用方法。
(注意PLC实验模块的端口设置)
2、预习并读懂本指导书附页所给的基本模块程序,理解程序中用的各指令的功能和在程序中的作用,完成表格一(附后)。
3、按所给图纸正确的连接各实验模板上的接口,结好后并检查接线是否准确无误。
(完成后,由指导老师检查)
4、完成以上工作后,按照下述的开关设定和操作,控制滑台的运动。
(1)、步进电机双速正反向控制(定步长手动触发电机旋转,行程开关限位)
按照指导书附页所给出的梯形图进行实验。
端口功能定义:X0:速度1启动;X1:速度2启动;X2:方向选择,1为顺时针,0为逆时针;X3:限位开关,1有效;X4:急停。
(2)全自动单周期运动
独立设计梯形图,由PLC控制步进电机完成“快进-工进-快退”工作循环。
提示:控制逻辑、计时器的应用,特殊中间继电器SM82的使用。
5、用光电测速计测量步进电机的转速并记录,调整PLC程序的速度指令参数后,再次测量步进电机的转速,完成表格二。
6、验证滑台的左、右极限位置的保护功能,完成表格三。
7、完成以上操作后,整理实验台,并记录整理数据。
六、实验思考:
见报告书(A)/(B)。
2、
步进电机初始转速(r/min):α=1.8°调整速度指令参数:细分:
附页:程序。