第四章 力敏传感器
- 格式:ppt
- 大小:5.21 MB
- 文档页数:101
第四章力敏传感器教学目标:1.了解弹性敏感元件的特性和要求。
2.了解几种常用测力称重传感器的特点、3.掌握电阻应变效应及半导体的压阻效应4.了解电桥电路的作用。
5.掌握单臂、双臂和全桥测量电路的异同点。
6.理解压电式传感器的工作原理。
了解它的特点。
7.了解它们的应用。
力敏传感器是使用很广泛的一种传感器。
它是生产过程中自动化检测的重要部件。
它的种类很多,有直接将力变换为电量的如压电式、压阻式等,有经弹性敏感元件转换后再转换成电量的如电阻式、电容式和电感式等。
它主要用于两个方面:测力和称重。
本章介绍电阻应变式传感器、压阻式和压电式传感器。
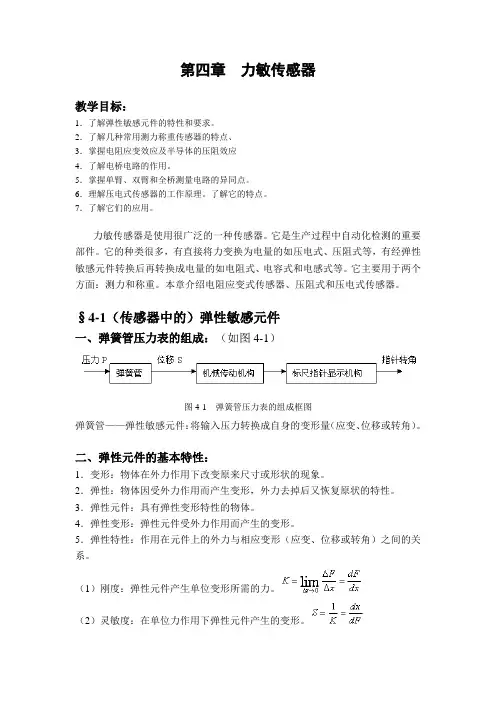
§4-1(传感器中的)弹性敏感元件一、弹簧管压力表的组成:(如图4-1)图4-1弹簧管压力表的组成框图弹簧管——弹性敏感元件:将输入压力转换成自身的变形量(应变、位移或转角)。
二、弹性元件的基本特性:1.变形:物体在外力作用下改变原来尺寸或形状的现象。
2.弹性:物体因受外力作用而产生变形,外力去掉后又恢复原状的特性。
3.弹性元件:具有弹性变形特性的物体。
4.弹性变形:弹性元件受外力作用而产生的变形。
5.弹性特性:作用在元件上的外力与相应变形(应变、位移或转角)之间的关系。
(1)刚度:弹性元件产生单位变形所需的力。
(2)灵敏度:在单位力作用下弹性元件产生的变形。
刚度和灵敏度表示了弹性元件的软硬程度。
元件越硬,刚度越大,单位力作用下变形越小,灵敏度越小。
6.线性弹性元件:刚度和灵敏度为常数,作用力F与变形X成线性关系。
三、弹性敏感元件的基本要求及类型:弹性元件在传感器技术中占有极其重要的地位。
它首先把力、力矩或压力转换成相应的应变或位移,然后配合各种形式的传感元件,将被测力、力矩或压力变换成电量。
基本要求:(1)具有良好的机械特性(强度高、抗冲击、韧性好、疲劳强度高等)和良好的机械加工及热处理性能。
(2)良好的弹性特性(弹性极限高、弹性滞后和弹性后效小等)。
(3)弹性模量的温度系数小且稳定,材料的线膨胀系数小且稳定。
力敏传感器的原理
力敏传感器是一种能感知物体施加在其上的力的装置。
它基于荷兰物理学家皮埃尔·居里发现的压电效应。
压电效应指的是
某些材料在受到外力时会产生电位移,从而生成电荷。
因此,力敏传感器的原理可以简单概括为利用压电效应测量物体施加在其上的力。
具体来说,力敏传感器通常由一个或多个压电材料制成。
当施加在传感器上的力发生变化时,压电材料会产生相应的电位移。
这个电位移可以通过测量传感器的电阻或电荷来检测和量化。
传感器上的电阻或电荷的变化与力的大小成正比。
为了提高测量的准确性和灵敏度,力敏传感器通常结合了一些辅助电子元件和信号处理器。
这些元件可以对输出信号进行放大、滤波和校准,以便将物体施加在传感器上的力转化为精确的电信号。
力敏传感器在许多领域广泛应用,例如工业自动化、医疗设备、机器人技术等。
它们可以用于测量物体的重量、压力、拉力等参数,从而实现对物体的控制和监测。
除了压电效应外,力敏传感器还可以基于应变测量原理、纳米技术等进行设计和制造。
不同原理的力敏传感器适用于不同的应用场景,但它们的基本原理都是测量物体施加在传感器上的力。

力敏传感器的原理及应用引言力敏传感器是一种能够测量并转换物体施加在其上的力的传感器。
它通过将受力物体的压力或应变转化为可测量的电信号,实现对力的测量和监控。
力敏传感器在许多领域具有广泛的应用,如工业自动化、机械设备、医疗领域等。
本文将介绍力敏传感器的工作原理以及其在各个领域的应用。
原理力敏传感器的工作原理基于应变表效应。
应变表是一种压敏传感器,它由电阻片或导线网格构成。
当力施加在力敏传感器上时,所受力的压力引起传感器中的应变,导致应变表发生形变。
应变表中的电阻随着应变的变化而发生改变,从而改变电阻值。
这个电阻值的变化通过电桥电路检测和测量,最终转换为电信号输出。
应用力敏传感器在许多领域都有广泛的应用,以下是一些常见的应用示例:1.工业自动化–力敏传感器可用于监测和控制机器人和自动化设备的力度和压力。
例如,在装配线上,力敏传感器可用于测量组装件的压力以确保正确的安装。
–在物流领域,力敏传感器可用于检测货物在传送带上的重量和压力,以实现自动分拣和包装。
2.机械设备–力敏传感器可用于监测和控制机械设备中的力度和扭矩。
例如,在一个工厂中,力敏传感器可用于监测机械装置的压力和力矩,以确保机器正常运行。
–在汽车工业中,力敏传感器可用于测量刹车和转向系统中的压力和力度,以实现精确的操控和安全性能。
3.医疗应用–在医疗领域,力敏传感器可用于监测和控制医疗设备的力度和压力。
例如,在手术中,力敏传感器可用于测量手术器械施加的力度和压力,以确保手术的准确性和安全性。
–在假肢领域,力敏传感器可用于检测假肢与残肢之间的力度和压力,以实现更加舒适和自然的运动。
优势力敏传感器相比其他传感器具有一些独特的优势:•灵敏度高:力敏传感器能够非常敏感地探测和测量微小的力度和压力变化。
•可靠性高:力敏传感器通常具有较长的使用寿命,并能够在恶劣的环境条件下正常工作。
•成本低:力敏传感器的制造成本相对较低,可以大规模应用于各个领域。
•多功能性:力敏传感器可用于测量不同类型的力,如压力、拉力和扭矩等。
简述力敏传感器测量原理力敏传感器是一种用于检测微小变化的传感器,其特点是它可以检测的变化量很小,甚至可以检测到毫米级的微小变化,并且精度很高,稳定可靠。
力敏传感器的测量原理是将力传递到传感器的传感元件上,然后根据传感元件的变化,通过信号放大器放大信号,再通过数据处理芯片计算出变化的量,最后将数据解码输出。
力敏传感器可以根据力种类分为压力传感器、电工磁传感器、拉力传感器、触觉传感器、微动传感器、钢丝传感器、陀螺秤传感器等。
其中,压力传感器是将被测物体的压力变化传递到传感元件上,通过变换电阻信号,放大信号,最后在压力分析仪或测量仪表中进行读出。
电工磁传感器显示出分离式电磁效应,可以测量出场及电流的变化,并将信号放大以满足解码需要。
拉力传感器可用于测量各种拉力,如杆件、线材等,并可将变形精确地转换为拉力信号,再放大后输出数据。
触觉传感器是一种用于检测触觉信号的传感器,可以检测到压力、热量、振动等信号,能够捕捉到物体的触摸状态及表面结构等信息,并转换为控制信号输出,使得自动化控制的操作更加精准和可靠。
微动传感器用于检测物体的微小运动,通过测量物体的微小运动和线性位移,检测机器的正常运行及小部件是否有松动等。
钢丝传感器能够检测到拉力传感器无法检测到的微小变化,其特别优势是一种极低的响应阻抗,可以检测到更多的变化量。
陀螺秤传感器能够检测角度和角速度变化,常用于导航及仪表系统之中。
以上就是力敏传感器测量原理的简要介绍。
当然,不同的传感器的测量原理是不同的,但是本质上都是通过将力传递到传感元件,再经过变换、放大和数据处理等步骤获得变化量,最终将数据解码输出,以供应用程序使用。
力敏传感器具有体积小、可靠性高、数字量多以及抗干扰能力强等特点,因此得到了广泛的应用。
力敏传感器的测量原理已经大大改善了传感器的功能,使得传感器更加精准、可靠,从而为各种应用提供了实用的便利。
力敏传感器在工业自动化、航空航天、机器人技术、智能家居和智能手机等领域都有着广泛的应用前景,前景十分广阔。
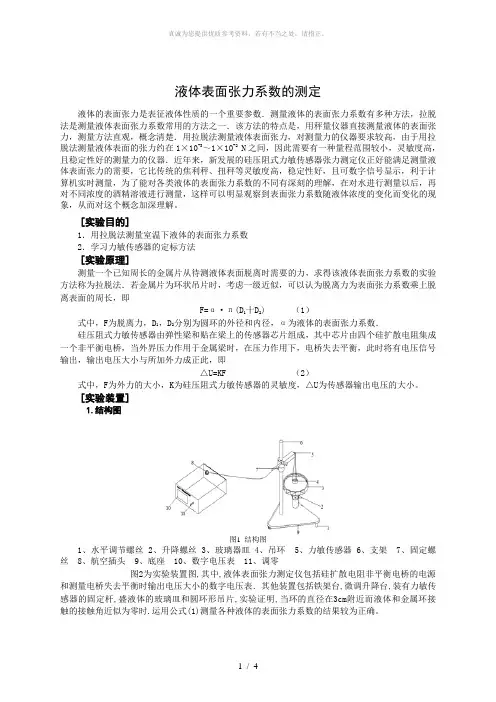
液体表面张力系数的测定液体的表面张力是表征液体性质的一个重要参数.测量液体的表面张力系数有多种方法,拉脱法是测量液体表面张力系数常用的方法之一.该方法的特点是,用秤量仪器直接测量液体的表面张力,测量方法直观,概念清楚.用拉脱法测量液体表面张力,对测量力的仪器要求较高,由于用拉脱法测量液体表面的张力约在1×10-3~1×10-2 N之间,因此需要有一种量程范围较小,灵敏度高,且稳定性好的测量力的仪器.近年来,新发展的硅压阻式力敏传感器张力测定仪正好能满足测量液体表面张力的需要,它比传统的焦利秤、扭秤等灵敏度高,稳定性好,且可数字信号显示,利于计算机实时测量,为了能对各类液体的表面张力系数的不同有深刻的理解,在对水进行测量以后,再对不同浓度的酒精溶液进行测量,这样可以明显观察到表面张力系数随液体浓度的变化而变化的现象,从而对这个概念加深理解。
[实验目的]1.用拉脱法测量室温下液体的表面张力系数2.学习力敏传感器的定标方法[实验原理]测量一个已知周长的金属片从待测液体表面脱离时需要的力,求得该液体表面张力系数的实验方法称为拉脱法.若金属片为环状吊片时,考虑一级近似,可以认为脱离力为表面张力系数乘上脱离表面的周长,即F=α·π(D1十D2) (1)式中,F为脱离力,D1,D2分别为圆环的外径和内径,α为液体的表面张力系数.硅压阻式力敏传感器由弹性梁和贴在梁上的传感器芯片组成,其中芯片由四个硅扩散电阻集成一个非平衡电桥,当外界压力作用于金属梁时,在压力作用下,电桥失去平衡,此时将有电压信号输出,输出电压大小与所加外力成正此,即△U=KF (2)式中,F为外力的大小,K为硅压阻式力敏传感器的灵敏度,△U为传感器输出电压的大小。
[实验装置]1.结构图图1 结构图1、水平调节螺丝2、升降螺丝3、玻璃器皿4、吊环5、力敏传感器6、支架7、固定螺丝8、航空插头9、底座 10、数字电压表 11、调零图2为实验装置图,其中,液体表面张力测定仪包括硅扩散电阻非平衡电桥的电源和测量电桥失去平衡时输出电压大小的数字电压表.其他装置包括铁架台,微调升降台,装有力敏传感器的固定杆,盛液体的玻璃皿和圆环形吊片,实验证明,当环的直径在3cm附近而液体和金属环接触的接触角近似为零时.运用公式(1)测量各种液体的表面张力系数的结果较为正确。
力敏传感器的原理力敏传感器是一种广泛应用于工业自动化、机器人、医疗设备等领域的传感器,用于测量和感知物体施加在其上的力的大小。
它基于材料的力学特性以及与物体接触的感知技术,可以精确地测量静态或动态的力,并将其转化为电信号输出。
力敏传感器的原理主要分为两种类型:压电式和变阻式力敏传感器。
1. 压电式力敏传感器压电式力敏传感器利用压电效应来实现力的测量。
压电效应是指某些晶体材料在受到机械应力时会产生电荷或电位变化的现象。
压电材料通常是由特殊晶体或陶瓷制成,如石英、锆酸钛等。
在压电式力敏传感器中,压电材料被安置在传感器的接触面上。
当外界力作用在传感器上时,力会通过接触面传递给压电材料。
由于压电效应,压电材料内部的电荷或电位会发生变化,这种变化可以通过感应电极捕捉到,并转化为电信号输出。
2. 变阻式力敏传感器变阻式力敏传感器则利用材料的电阻随受力变化的特性来实现力的测量。
在变阻式力敏传感器中,通常采用应变测量电阻(strain gauge)来感知受力。
应变测量电阻是一种以金属导线或薄膜材料制成的电阻,其电阻值会随着受力的变化而发生变化。
通常,应变测量电阻被粘贴或粘合在传感器的应变区域上,当外界力作用于传感器时,应变区域发生形变,从而导致应变测量电阻的电阻值发生变化。
为了测量电阻值的变化,变阻式力敏传感器通常需要一个电桥电路。
电桥电路由多个电阻组成,其中一个电阻为应变测量电阻,其余的为补偿电阻和标定电阻。
当外界力施加在传感器上时,应变测量电阻的电阻值发生变化,这会引起电桥电路不平衡,进而产生微小的电压差。
这个电压差可以通过电桥电路中的放大器放大,并转化为可供读取和处理的模拟电信号或数字信号输出。
总结起来,力敏传感器的原理主要包括压电效应和应变测量电阻。
压电式力敏传感器利用压电效应将受力转化为电荷或电位变化,并输出相应的电信号;而变阻式力敏传感器则利用应变测量电阻的电阻值随受力变化的特性,通过电桥电路将变化转化为电压差输出。
力敏传感器测量原理力敏传感器是一种用于测量压力或拉力的设备,其测量原理基于压阻效应。
当外力施加在敏感器上时,敏感元件内部的电阻值会发生变化,这个电阻值的变化可用于计算所施加的压力或拉力的大小。
力敏传感器通常由一个压阻片、一个弹簧、一个机械底座、一个电缆和连接器组成。
压阻片是敏感元件,它是由一个薄层的导电材料制成的,如硅、钨、销锌铝等。
当施加压力或拉力时,压阻片内的导电材料会发生微小的变形,导致阻值发生变化。
弹簧将敏感元件和测试对象联系在一起,它可以根据所施加的压力或拉力的大小而发生压缩或拉伸。
机械底座负责支撑传感器和测试对象,同时保持传感器的稳定性。
电缆和连接器将传感器和信号采集设备连接在一起,将压阻片内的变化转化为电信号输出。
使用力敏传感器进行测量时,需要将传感器放置在所需要测量的物体上。
当外力作用于该物体时,弹簧将传感器压缩或拉伸,此时压阻片的电阻值发生变化,电信号随之发生变化。
这个变化的大小可以通过信号采集设备进行读取和分析,从而计算出外力的大小。
力敏传感器有许多应用领域,例如:在机械制造业中,它们被用于测量机械零件的弹性变形和应力;在医学领域中,它们被用于测量骨骼和肌肉组织的应力和压力;在汽车行业中,它们被用于测量刹车系统的压力和转向系统的力量;在建筑领域中,它们被用于测量桥梁和建筑物的载荷。
力敏传感器是一种精密的测量设备,可以准确地测量所施加的压力或拉力的大小,其测量原理基于压阻效应。
通过使用力敏传感器,我们可以更好地了解物体的应力或压力的性质,有助于提高生产效率和产品质量。
除了测量原理,力敏传感器还有许多其他的重要参数需要考虑。
其中最重要的是灵敏度和线性度。
灵敏度是指传感器输出的电信号与施加在传感器上的外力之间的关系。
换句话说,灵敏度越高,传感器输出的电信号就会更精确地反映所施加的外力的大小。
灵敏度可以通过外力与电信号之间的比值来计算。
一个100牛顿的力敏传感器,当施加10牛顿的力时,其输出电信号为1伏特,则其灵敏度为10伏特/牛顿。