导电橡胶力敏传感器研究进展
- 格式:pdf
- 大小:416.08 KB
- 文档页数:5
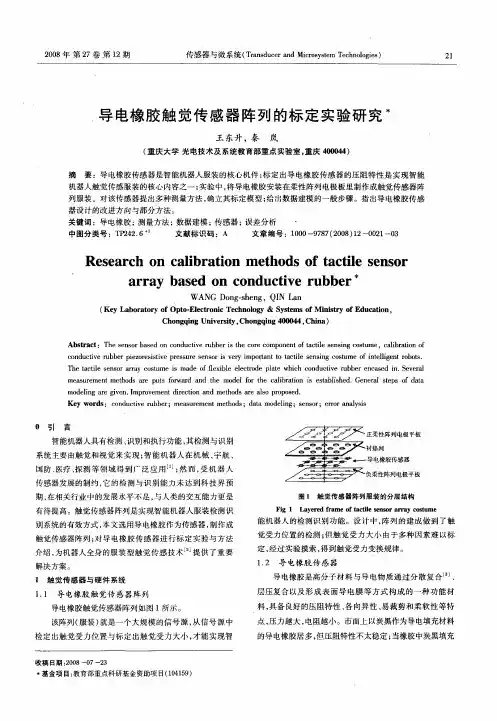
新型柔性触觉传感器阵列结构设计及仿真研究机器人触觉传感器的关键之一是能寻找到一种能精确检测出因受接触力后在其表面所产生变化的的敏感材料,新型力敏导电橡胶则是较理想和很有前途的一种材料。
力敏导电橡胶力学性能好,抗干扰性能强,制作的传感器具有很高的分辨率,不仅可以制作实用的单维阵列触觉传感器,而且为机器人控制用的三维力触觉传感器的研制提供了新的思。
1力敏导电橡胶触觉传感器1. 1力信息检测原理从20世纪70~80年代,国外电子工业对导电橡胶制品的需求和应用开始迅速发展。
目前,导电橡胶已被大量广泛地应用到医疗、机器人、军事领域等,作为电磁屏蔽、接地、防静电、EMP、扰动等的应用。
导电橡胶在很宽的温度范围内有出色的物理表现和导电性质。
目前商业化的导电橡胶产品大多数是导电橡胶按键,导电橡胶粘合剂等。
力敏导电橡胶是一种特殊的导电橡胶,它是在绝缘的高分子材料中均匀加入导电粒子(如碳黑)形成的。
它除了具备一般的导电橡胶的特点外,还具有较好的力学性能。
在不受力的情况下,材料中的导电粒子彼此不接触,表现为大电阻。
当其受力时,外力改变了力敏导电橡胶中导电粒子的分布,从而改变了材料的电阻。
因此,严格地说,它是一种对应力敏感的导电橡胶,而应力又与形变联系在一起,这样又可以说它是对形变敏感的,这一点对于工程设计尤为重要,为制作力传感器提供了思路。
特别是在机器人触觉传感器中,可利用这种具有压阻特性的导电橡胶进行柔性接触压力的测量。
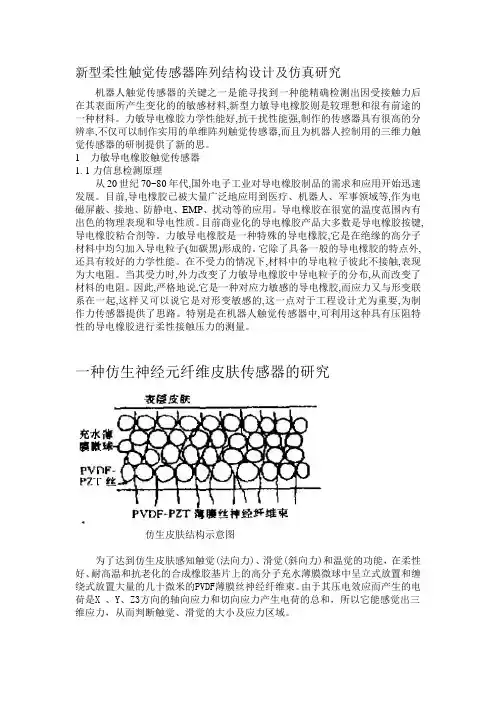
一种仿生神经元纤维皮肤传感器的研究仿生皮肤结构示意图为了达到仿生皮肤感知触觉(法向力)、滑觉(斜向力)和温觉的功能,在柔性好、耐高温和抗老化的合成橡胶基片上的高分子充水薄膜微球中呈立式放置和缠绕式放置大量的几十微米的PVDF薄膜丝神经纤维束。
由于其压电效应而产生的电荷是X 、Y、Z3方向的轴向应力和切向应力产生电荷的总和,所以它能感觉出三维应力,从而判断触觉、滑觉的大小及应力区域。
An integrated flexible temperature and tactile sensing array using PI-copper films上图为在柔性基体上集成了触觉传感器和温度传感器的人造皮肤的结构图。
导电橡胶复合材料温敏特性研究仉月仙;李斌【摘要】根据导电橡胶复合材料产生温阻效应的物理机理,分析了影响其温敏特性的主要因素,研究了不同导电粒子添加量、基体材料、硫化剂和改性剂等对导电橡胶温度敏感性能的影响规律.制备了具有温敏特性的导电橡胶复合材料;导电粒子填料添加量会改变复合材料的温敏性质,填充量少表现为正温度系数效应,填充量较大则呈现为负温度系数效应,存在转折温度;基体材料的粘度关系到复合材料的温度敏感程度,粘度小、电阻变化范围大、温度敏感度强,反之较弱;不同组分室温硫化硅橡胶基体的温敏特性有很大区别;不同硫化剂对温敏强度有一定影响,添加改性材料对复合材料温敏特性有显著作用.导电橡胶可作为温度传感器的敏感材料.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)012【总页数】5页(P6-10)【关键词】导电橡胶;温阻效应;温敏特性;温度传感器【作者】仉月仙;李斌【作者单位】昆明理工大学城市学院,云南昆明650051;昆明理工大学化学工程学院,云南昆明650500【正文语种】中文【中图分类】TM215.2;TP212.1将导电粒子均匀分散在橡胶基质中制成的复合材料,其体系电阻会随着外界温度的变化而变化,表现出一定的温敏特性,可作为一种新型温度传感器的敏感材料。
导电填料的种类以及添加量、填料的分散度、基体材料、制备工艺、纳米改性材料的添加等都会影响导电橡胶复合材料的温敏特性。
谢泉等人[1,2]通过研究提出,复合型导电硅橡胶的电阻率与外界温度有一定关联性,且导电填料的多少影响到电阻的温敏效应;田合雷、刘平等人[3~5]分析了温度敏感导电炭黑/橡胶的工作原理, 认为基体的体积膨胀导致炭黑体积分数被稀释的过程对正电阻—温度系数效应存在重要影响, 且建立了相应的电阻—温度计算模型;唐婷[6]测试了多种固化剂对炭黑填充环氧树脂复合材料的温阻特性,发现使用不同固化剂复合材料的正温度系数强度不同;沈烈[7]采用炭黑和碳纤维填充双组分聚合物,提出所形成的双渗流导电网络可有效抑制负温度系数效应;同样添加碳纤维,刘卓典[8]发现复合材料的电阻率在温度变化过程中随着碳纤维含量的增加且呈非线性,阻温曲线存在回滞环;李阳[9]以多壁碳纳米管(MWCNTs)及石墨烯为填料制备了导电复合材料,研究了多壁碳纳米管的添加量对复合材料电阻率随温度升高或降低过程中的变化规律;国外学者Farid E T[10]研究发现,导电填充型三元乙丙橡胶随着温度的升高先呈现负温度系数效应,后呈现正温度系数效应,而添加TiC陶瓷粉可形成稳定的微观结构,从而降低温度敏感性。
基于EIT技术的柔性触觉传感器的设计程文芳;王晓杰;董帅【摘要】随着机器人技术的日益发展,柔性传感器在机器人皮肤上的应用也得到了新的发展。
本文提出并研究了一种基于导电聚合物压敏电阻效应的柔性触觉传感器的设计,使用由聚二甲基硅氧烷PDMS(Poly Di Methyl Siloxane)和多壁碳纳米管(MWCNTs)混合而成的导电橡胶作为传感器主体,运用EIT(Electrical Impedance Tomography)技术,设计并制作了本系统的硬件电路,并用其检测、传输导电橡胶的边缘电势数据。
最后在计算机中应用工具包EIDORS进行有限元模型和图像重构技术,有效且直观的将导电橡胶上的受力位置表现出来。
实验对1~3个目标分别进行了成像,证明了本设计的可行性。
%The rapid development of robot technology has led to new applications of soft sensors for robotic sensitive skin. In this paper we present a study on the design of flexible tactile sensor based on the piezoresitivity of a new conductive polymer which has been developed by ourselves. The conductive polymer is made by blending PDMS (polydimethylsiloxane,polydimethylsiloxane)with a small amount of multi-walled carbon nanotubes(MWCNTs) which has a high sensitivity in resistance-pressure response. The Electrical Impedance Tomography(EIT)is used to create the flexible tactile sensor. The peripheral hardware circuits based on EIT are designed and manufactured. The data obtained from hardware circuits is processed by computer. The finite element modeling and image recon⁃structue has been performed with a toolkit calledEIDORS. The experiment has been carried out to successfully identify the positions of the targets in 1~3 goals when touching on the sensor surface.【期刊名称】《传感技术学报》【年(卷),期】2016(029)002【总页数】6页(P155-160)【关键词】柔性触觉传感器;EIT;导电橡胶;EIDORS【作者】程文芳;王晓杰;董帅【作者单位】中国科学技术大学自动化系,合肥230027; 中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164;中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164;中国科学技术大学自动化系,合肥230027; 中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164【正文语种】中文【中图分类】TP212.1随着传感器技术的不断发展,适用于机器人“皮肤”的柔性触觉传感系统引起了人们的广泛关注。
基于导电橡胶填充海绵的柔性压力传感器研究目录1. 内容概括 (2)1.1 导电橡胶的历史与发展 (2)1.2 压力传感器的意义与分类 (3)1.2.1 压力传感器的一般分类 (4)1.2.2 柔性压力传感器的特点与不足 (5)2. 文献综述 (7)2.1 导电橡胶的导电机理与性能 (8)2.1.1 导电橡胶的结构组成 (9)2.1.2 导电填充剂的类型 (10)2.1.3 导电橡胶的性能优化 (11)2.2 海绵的物理性质与材料特性 (12)2.2.1 海绵的微观结构与物理特性 (14)2.2.2 应对外加应力的性能体现 (15)3. 实验研究 (16)3.1 材料与器件制备 (17)3.1.1 原材料的选择和定位 (18)3.1.2 传感器结构设计 (19)3.1.3 制备工艺与设备 (21)3.2 实验条件与测量方法 (21)3.2.1 环境与取样条件 (23)3.2.2 测量设备与工具 (24)3.2.3 校准与数据采样标准 (25)3.3 性能测试与数据分析 (26)3.3.1 压力响应特性测验 (28)3.3.2 稳定性与耐久性测试 (29)3.3.3 数据处理与传感器的量程标准化 (30)4. 结论与展望 (31)4.1 压力传感器研究现状与实验结果的总和 (32)4.2 导电橡胶填充海绵传感器的优势与改进方向 (34)4.3 对未来传感器设计与应用的前景预测 (35)1. 内容概括本研究着力探索一种基于导电橡胶填充海绵的柔性压力传感技术。
在逐渐增长的智能穿戴设备和工业控制中,实时压力监测的重要性尤为明显。
为此,我们精心设计了一种创新的压力感应组件,旨在提升传感器的灵敏度、响应速度快、以及宽广的检测范围。
该研究采取的主要措施包括海绵基质、导电橡胶作为活性传感器材料以及精确的控制填充比例。
实验部分,我们详细测试了这种传感器的机械性能、电学特性和对多种压力的响应性能。
结果显示,该柔性传感器不仅具备良好的柔韧性和适应复杂地形的能力,而且具有高灵敏度和极快的响应时间,尤其是在高应力作用下表现尤为突出。
、、、导电橡胶的应用于柔性电子器件研究导电橡胶的应用于柔性电子器件研究随着柔性电子技术的发展,柔性电子器件因其柔性、轻量、可弯曲等特点而越来越受到人们的关注。
而导电橡胶作为一种特殊的材料,其导电性能和柔性特点的结合使其成为柔性电子器件制造中的重要材料之一。
本文将详细讨论导电橡胶在柔性电子器件中的应用及其研究进展。
一、导电橡胶的基本概念导电橡胶是一种具有导电性能的橡胶材料,其导电性能与橡胶的柔性特点相结合,可以广泛应用于柔性电子器件的制造中。
导电橡胶的制备方法有很多种,最常见的是将导电填料添加到橡胶中,使橡胶成为导电材料。
填料一般会使用导电碳黑、导电银粉、导电金属等。
导电橡胶的导电性能与填料的种类、添加量和橡胶的种类有关。
导电橡胶具有以下特点:首先,导电橡胶具有良好的柔性和弹性,可以弯曲和拉伸而不损坏导电性能;其次,导电橡胶具有较好的耐腐蚀性能,可以长时间使用在潮湿或酸碱环境中;第三,导电橡胶具有较好的耐磨性和耐热性,可以在高温或高速摩擦环境下使用。
二、导电橡胶在柔性电子器件中的应用导电橡胶在柔性电子器件中的应用主要体现在以下几个方面:1. 柔性电极导电橡胶可以作为柔性电极的材料,用于制造柔性电子器件中的电极。
导电橡胶作为电极材料具有良好的柔性、耐腐蚀性和导电性能,可以弯曲和拉伸而不影响导电性能,同时可以适应各种形状的电子器件的制造。
2. 柔性传感器导电橡胶可以作为柔性传感器的材料,用于制造柔性电子器件中的传感器。
导电橡胶作为传感器材料具有灵敏度高、响应速度快、可重复使用等特点,可以用于制造柔性电子器件中的压力传感器、应变传感器等。
3. 柔性电子线路导电橡胶可以作为柔性电子线路的材料,用于制造柔性电子器件中的电子线路。
导电橡胶可以制成各种形状的线路,可以适应各种形状的电子器件的制造,同时具有优异的导电性能和柔性特点,可以保证电子器件在弯曲和拉伸后仍然具有优异的导电性能。
三、导电橡胶在柔性电子器件中的研究进展近年来,导电橡胶的应用于柔性电子器件中得到了广泛的研究和探索。
用于检测三维力的柔性触觉传感器结构研究及有限元分析刘彩霞;黄英;缪伟;蔡文婷;袁海涛;曹广辉【期刊名称】《计量学报》【年(卷),期】2014(035)005【摘要】基于力敏导电橡胶材料,设计了一种四电极对称结构的三维力柔性触觉传感器.利用有限元分析软件ANSYS,结合橡胶材料的Mooney-Rivlin本构模型,对传感器加载垂直力和剪切力进行有限元分析,得到传感器在三维力作用下的应力应变分布状态,并进行了实验验证,结果表明了传感器结构设计和数学模型构建的合理性.通过对传感器传力的触头材料和形状进行有限元分析,表明触头选择硬度相对较大的材料,制成长椭球状半径(a=1.5b),可以优化传感器的性能,为用于检测三维力的柔性触觉传感器的实际应用提供了依据.【总页数】5页(P458-462)【作者】刘彩霞;黄英;缪伟;蔡文婷;袁海涛;曹广辉【作者单位】合肥工业大学电子科学与应用物理学院,合肥安徽230009;合肥工业大学电子科学与应用物理学院,合肥安徽230009;合肥工业大学电子科学与应用物理学院,合肥安徽230009;合肥工业大学电子科学与应用物理学院,合肥安徽230009;合肥工业大学电子科学与应用物理学院,合肥安徽230009;合肥工业大学电子科学与应用物理学院,合肥安徽230009【正文语种】中文【中图分类】TB931【相关文献】1.一种简单的电容式三维力柔性触觉传感器设计 [J], 张淑艳;张金红;赵立蕊2.一种可感知三维力的新型柔性触觉传感器及滑觉识别算法研究 [J], 毛磊东;黄英;郭小辉;张阳阳;刘平3.一种基于导电橡胶的三维力柔性触觉传感器阵列机理与仿真研究 [J], 李珊红;汪玉冰;曹会彬;丁俊香;黄英;双丰;葛运建4.基于力敏导电橡胶的新型三维力柔性触觉传感器仿真研究 [J], 徐菲5.三维力柔性触觉传感器电极研究与实验 [J], 黄英;缪伟;李雷鸣;蔡文婷;杨庆华;葛运建因版权原因,仅展示原文概要,查看原文内容请购买。
导电活性聚合物传感器和致动器的研究进展吴新明 齐暑华 贺 捷 段国晨(西北工业大学理学院应用化学系,西安 710072) 摘要 介绍了一些典型导电活性聚合物(CEP)的导电机理,重点论述了CEP在致动器及物理、化学传感器中的应用情况,提出了目前研究中存在的问题,指出了今后CEP致动器和传感器的发展方向是开发性能优异的新型CEP 材料,并优化合成工艺,提高产率和稳定性,降低生产成本。
关键词 导电活性聚合物 传感器 致动器 自20世纪70年代中期发现导电活性聚合物(CEP)以来,CEP已成为研究的热点[1-2],聚吡咯、聚噻吩、聚苯胺等具有代表性的典型CEP引起了智能材料研究人员极大的兴趣[3]。
所谓智能材料是指能识别适当的环境刺激,并将这些刺激所提供的信息以适当的形式、在适当的时间内予以响应,同时伴有能量的转换和存储[4]。
电刺激可引起CEP的化学、电学、力学性质等发生巨大的变化。
在合成CEP过程中可通过控制反应条件来控制其综合性能,最后利用电刺激的方法使CEP满足不同领域的应用要求。
目前,以CEP制作的智能材料已广泛应用于各个领域,展现出良好的应用前景,尤其是在传感器和致动器应用方面具有操作简单、过程易于控制、灵敏度好等优点。
笔者对一些典型的CEP进行概括,介绍了其在传感器和致动器方面的应用情况。
1 CEP的导电机理CEP种类繁多,目前研究最多、应用最为广泛的主要有聚乙炔、聚苯胺、聚噻吩和聚吡咯等4种本征型CEP。
有关CEP的导电机理,现在主要沿用了无机半导体理论的能带理论和分子导电的孤子理论和极化子理论[5]。
例如聚乙炔的共轭双键组成的分子链中,双键中的∏电子可以看做是连通的,在外场作用下,电子云的变形具有明显的方向性。
由于聚乙炔体系中有两个或两个以上状态完全相同的分子轨道,所以成键或反键的分子轨道在能量守恒的条件下,将分裂成能量相近但并不全同的分子轨道,因为能量相近,也就可以把它们看成一个能带,下面的能带相当于价带,上面的是导带,中间的空隙有利于电子的传输,从而达到导电的目的。