直流无刷电机反电动势过零检测方法汇总
- 格式:docx
- 大小:10.55 KB
- 文档页数:2
无刷直流电机无位置传感器控制方法综述所谓的无位置传感器控制,正确的理解应该是无机械的位置传感器控制。
在电机运转的过程中,作为逆变桥功率器件换向导通时序的转子位置信号仍然是需要的,只不过这种信号不再由位置传感器来提供,而应该由新的位置信号检测措施来代替,即以提高电路和控制的复杂性来降低电机的复杂性。
所以,目前永磁无刷直流电机无位置传感器控制研究的核心和关键就是架构一转子位置信号检测线路,从软硬件两个方面来间接获得可靠的转子位置信号,借以触发导通相应的功率器件,驱动电机运转。
1.反电势过零点法(端电压法):基于反电动势过零点的转子位置检测方法是在忽略永磁无刷直流电机电枢反应影响的前提下。
通过检测断开相反电动势过零点。
依次得到转子的六个关键位置信号。
但是存在如下缺点:反电动势正比于转速,低速时不能通过检测端电压来获得换相信息故这种方法严重影响了电机的调速范围。
使电机起动困难;续流二极管导通引起的电压脉冲可能覆盖反电动势信号。
尤其是在高速、重载、或者绕组电气时间常数很大等情况下,续流二极管导通角度很大,可能使得反电动势法无法检测。
反电势过零检测法的改进策略:针对以上缺点,利用神经网络的非线性任意逼近特性, 提出一种基于神经元网络的电机相位补偿控制。
首先由硬件电路获得有效的反电动势信息, 再利用BP 神经网络进行正确相位补偿, 实现无刷直流电机的无位置传感器控制, 获得了较好的效果[1]。
还有一种采用人工神经元网络的永磁无刷直流电机反电势预测新方法, 采用神经元网络方法对永磁无刷直流电动机反电势波形准确预测的结果进一步用于电机动、静态特性的仿真或预测, 这将比假设电机反电势波形为理想正弦波或梯形波所进行的仿真更接近电机的实际运行结果。
较之传统的路和场的计算方法, 达到了快速性和准确性的统一, 且由于神经元网络的自学习神经元网络成功训练后, 就可以用以预测所研究类型的永磁无刷直流电机的反电势波形[2]。
直接检测法,通过比较逆变器直流环中点电压和电机断开相绕组端电压的关系, 直接检测到断开相绕组反电动势的过零点, 再将该过零点延迟30°电角度即可获得无刷直流电机绕组换相所必须的转子位置信号。
![反电动势过零点检测法的研究[1]](https://uimg.taocdn.com/5083fc0c79563c1ec5da713b.webp)
反电动势测量方法嘿,咱今儿就来唠唠反电动势测量方法这档子事儿!你说这反电动势,就好像是电路里的一个小调皮,藏在那不太好捉摸。
那咱得想法子把它给揪出来呀!一种常见的方法呢,就像是拿着个小探子去探测一样,这就是直接测量法。
直接去测那反电动势的值,就像你要找个东西,直接伸手去摸一样。
不过这可得小心点,别摸错了地方哦!还有一种呢,就好比是通过观察别的现象来推断这个小调皮的存在。
比如说,通过电机的转速啊、电流啊这些来推测反电动势的大小。
这就像是你通过一个人的行为举止来猜测他心里在想啥,有点玄乎,但还真挺管用。
咱再打个比方,测量反电动势就像是在找一个隐藏在黑暗中的宝贝。
有时候你得用特别的工具,有时候你得靠经验和感觉。
比如说,用一些专门的仪器来测量,那可真是精准得很呐!但要是没有这些高级玩意儿咋办呢?那就得靠咱的智慧和技巧啦!你想想看,要是能准确地测量出反电动势,那对很多工程啊、技术啊,那可都是大帮助啊!就像给机器安上了一双明亮的眼睛,能让它更好地工作。
那怎么才能把这测量工作做好呢?首先得细心,不能马虎,这可不是闹着玩的。
就像走钢丝一样,得一步一步稳稳当当的。
然后呢,还得不断学习新方法、新技术,不能老是守着老一套。
这世界变化快呀,咱得跟上节奏不是?而且哦,在测量的时候还得注意各种因素的影响呢。
比如说温度啊、湿度啊,这些都可能会让结果不太准确。
这就好比你走路的时候,路上有坑坑洼洼,你得小心避开,不然就会摔跟头。
总之呢,反电动势测量方法可不是那么简单的事儿,但只要咱用心去研究,肯定能找到最合适的办法。
咱可不能被这个小调皮给难住了呀,得把它给搞定!让我们一起加油,去探索更多关于反电动势测量的奥秘吧!。
反电动势过零检测无刷直流电机转子位置新方法李自成;程善美;蔡凯;秦忆【期刊名称】《电工技术学报》【年(卷),期】2009(024)007【摘要】在对传统的反电动势过零检测原理分析的基础上,提出了一种利用线电压来实时计算反电动势的无刷直流电机(BLDCM)转子位置辨识方法.该方法抛弃了传统的反电动势过零硬件检测方法,通过检测无刷直流电机任意两路线电压,经软件实时计算,就可以得到未导通相的反电动势过零值,再延迟30°电角度即可得到对应的换相点.对电机中点与直流母线电压中点的电位关系进行了具体推导,分析了在全桥PWM调制方式下断开相在非换相区间无电流续流的现象,从而证明全桥PWM调制方法适用于本文提出的转子位置辨识方法.该方法结构简单,不需要构造电机中点、不需要反电动势过零硬件检测和深度滤波电路.仿真和实验结果表明,本文提出的方法辨识转子位置精度较高,可以在较宽的转速范围内实现BLDCM的无位置传感器控制.【总页数】7页(P52-58)【作者】李自成;程善美;蔡凯;秦忆【作者单位】华中科技大学控制科学与工程系,武汉,430074;武汉工程大学电气信息学院,武汉,430073;华中科技大学控制科学与工程系,武汉,430074;华中科技大学控制科学与工程系,武汉,430074;华中科技大学控制科学与工程系,武汉,430074【正文语种】中文【中图分类】TM381【相关文献】1.无刷直流电机反电动势过零检测研究 [J], 高文华2.无刷直流电机反电动势过零检测及其相位补偿 [J], 童军3.线反电动势检测无刷直流电机转子位置方法 [J], 李自成;程善美;秦忆4.基于线间反电动势的无刷直流电机转子位置估算 [J], 李自成;程善美;蔡凯5.无刷直流电机反电势过零检测新方法 [J], 朱俊杰;粟梅;陈程;杨龙因版权原因,仅展示原文概要,查看原文内容请购买。

传统的无刷直流电机都需要一套复杂的位置传感器,这对电机的可靠性、制造工艺要求等带来不利的影响。
具体表现在以下几方面:(1)增大了电机尺寸;(2)传感器信号传输线多,容易引入干扰;(3)高温、低温、污浊空气等恶劣工作条件会降低传感器可靠性;(4)传感器的安装精度直接影响电机的运行性能。
因此国内外学者对无位置传感器无刷直流电机位置检测进行了很多研究,提出了许多方法,其中最简单实用的是基于反电势检测的方法。
通过测出各相反电势的过零点,获得三相电机所需的转子6个关键位置信号。
但当电机起动或转速很低时,反电势为零或很小,反电势法已不再适用,针对这个问题,人们提出了多种方法以实现无刷直流电机的可靠起动。
1 反电势法检测转子位置起动方法1.1 三段式起动法[1][2][3] [4]1) 三段式起动法的原理及其实现文献[1]、[2]、[3]和[4]描述的三段式起动法是按他控式同步电动机的运行状态从静止开始加速,直至转速足够大,再切换至无刷直流电机运行状态,实现电机的起动。
这个过程包括转子定位、加速和运行状态切换三个阶段。
其电路框图如图1所示。
电机静止时的转子初始位置决定了逆变器第一次应触发哪两个功率器件,而在没有位置传感器时判断转子初始位置很复杂。
可以先让逆变器任意两相导通。
并控制电机电流.通电一段时间后,转子就会转到与该导通状态相对应的一个预知位置.完成转子的定位。
转子定位后.根据电机转向,就可知道接下来应触发的逆变器功能器件。
这样主控制器发出一系列外同步信号SYA、SYB、SYC(分别与转子位置信号CPA、CPB、CPC对应).经编码器产生逆变器触发信号.触发逆变器相应功率器件导通。
逐步提高外同步信号频率.电机就工作在他控式变频调速同步电动机状态。
电机低速时,反电势很小,因此直流电压或逆变器的斩波占空比也应该小;转速增高。
等效外施电压也应随之增高.这样才能保证电机既不过流,也不失步。
在这个加速过程中,由于他控式变频调速同步电动机运行不稳定。
直流无刷电机反电动势过零检测方法
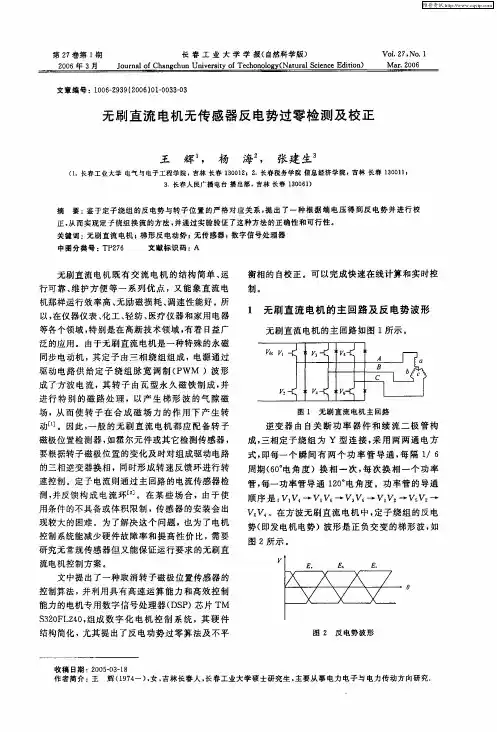
一般的永磁无刷直流电机是由三相逆变桥来驱动的,根据转子位置的不同,为了产生最大的
平均转矩,在一个电角度周期中,具有6个换相状态。在任意一个时间段中,电机三相中都只有
两相导通,每相的导通时间间隔为120°电角度。例如,当A相和B相已经持续60°电角度时,
C相不导通。这个换相状态将持续60°电角度,而从B相不导通,到C相开始导通的过程,称为
换相。换相的时刻取决于转子的位置,也可以通过判断不导通相过零点的时刻来决定。通过判断
不导通相反电动势过零点,是最为常用也最为适合的无位置传感器控制方法。
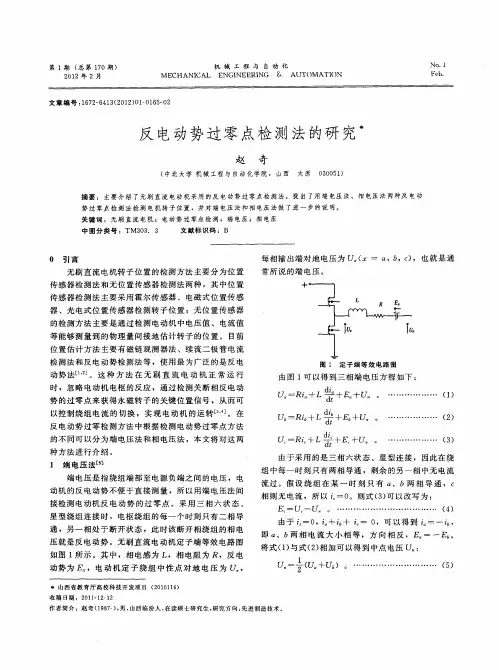
反电动势过零点的检测方法是,通过测量不导通相的端电压,与电机的绕组中点电压进行比
较,以得到反电动势的过零点。但对于小电枢电感的永磁无刷直流电机,在许多情况下,绕组中
点电压难以获取,并且需要使用电阻分压和进行低通滤波,这样会导致反电动势信号大幅地衰减,
与电机的速度不成比例,信噪比太低,另外也会给过零点带来更大的相移。
与上面的方法相比,更为常用的是虚拟中点电压法。假设A相和B相导通,则A和B两相电
流大小相等,方向相反,C相电流为零,则根据永磁无刷直流电机数学模型有
根据上述方程,将不导通相的端电压与所计算的虚拟中点电压进行比较,也可以获得反电动
势的过零点。这种方法十分简单,实现也比较方便。但是,由于无刷直流电机按一定频率进行
PWM斩波控制,其计算出的虚拟中点电压也会随着PWM的高低电平而发生相同频率的在电源和地
电平之间的变化。这样,就会带来极大的共模电平和高频噪声,会影响反电动势过零点检测的精
确性。同样,和中点比较法一样,这种方法也必须要对绕组端电压进行分压和低通滤波。
这样,在一个PWM周期中,电枢绕组相电流就必然存在断续状态。速度提高时,电枢绕组中
会产生峰峰值极大、频率很高的反电动势。由于以上特点,一些普遍采用的BLDC无位置传感器
的控制方法均不适合。现有的无位置传感器的控制方法,如端电压检测法和转子位置估计法等,
将很难得到良好的控制效果,其理由如下所述:
首先,无刷直流电机要求在电机转速提高的过程中,采用现有的端电压与中点电压比较的方
法,要对三相绕组进行分压阻容滤波,计算出不导通相反电动势的过零点,再延后一定时间进行
换相。但是,这样得到的反电动势过零点会因为无刷直流电机转速提高而产生过大的相移,导致
当检测到反电动势过零点后,真正的换相点已经过去,从而造成换相失误。另外,现有的转子位
置估计法,在高速时必须以极高的采样频率对永磁无刷直流电机中多个物理量进行测量,然后运
行复杂的算法估计出转子位置,这样即使采用主频较高的控制器,也很难实时得到精确的位置信
号。并且,随着电机转速的提高,位置估计算法难以及时地计算出当前电机转子的位置情况,对
于转速范围较大的情况,无位置传感器的检测难以实现。
其次,现有的无刷直流电机无位置传感器的控制方法一般只适用于绕组相电流不存在断续状
态的情况。而当永磁无刷直流电机电枢电感较小时,在一个PWM周期中,则可能出现绕组相电流
断续状态。当相电流从续流状态向断流状态突变时,由于三相逆变桥中功率管的寄生电容和电枢
绕组中的电感和电阻相互作用,端电压会存在二阶阻尼振荡过程。在振荡过程中,将检测到的电
枢绕组端电压应用于无位置传感器的换相中,会得到不正确的结果。
因此,使用现有的无位置传感器的控制方法,应用于小电枢电感的磁悬浮飞轮用无刷直流电
机上,都无法得到良好的控制效果。