第五章点的运动学习题解答
- 格式:doc
- 大小:343.50 KB
- 文档页数:7
高一物理必修二第五章平抛运动及其规律基础练习题(带参考答案)高一物理第五章一、研究要点平抛运动及其规律1.会用运动合成和分解的方法分析平抛运动。
2.掌握平抛运动的规律,会分析解决生活中的平抛运动问题。
二、研究内容一)平抛运动基本知识1.平抛运动的特征初速度方向,只受重力,属于抛体曲线运动。
2.平抛运动的分解水平方向:匀速直线运动,竖直方向:自由落体运动。
问题1:平抛运动是什么性质的运动?例1:(多选题)关于平抛运动,下列说法正确的是()A.是匀变速运动 B.是变加速运动C.任意两段时间内速度改变不一定相等 D.任意相等时间内的速度改变一定相等练1:(多选题)物体在做平抛运动的过程中,以下的物理量不变的是()A.物体的速度 B.物体的加速度C.物体竖直方向的分速度 D.物体水平方向的分速度问题2:如何研究平抛运动?例2:为了研究平抛物体的运动,可以概括为两点:①水平方向作匀速运动;②竖直方向作自由落体运动。
为了研究平抛物体的运动,可以进行如图1所示的实验。
1)把两个小铁球分别吸在电磁铁C、D上,切断电源,使两个小铁球以相同的初速度从轨道A、B射出,两小铁球能够在轨道B上相碰,这可以说明水平方向作匀速运动。
2)把两个小铁球分别吸在电磁铁C、E上,切断电磁铁C的电源,使一只小球从轨道A射出时碰撞开关S,使电磁铁E断电释放它吸着的小球,两个小球可以在空中相碰。
这可以说明竖直方向作自由落体运动。
练2:如图2所示,在光滑的水平面上有一小球a以初速度v运动,同时刻在它的正上方有小球b也以初速度水平v抛出,并落于c点,则()A.小球a先到达c点B.小球b先到达c点C.两小球同时到达c点D.不能确定二)平抛运动规律1.平抛运动的速度及其方向水平速度vx初速度vx竖直速度vy初速度vygt;合速度v=√(vx²+vy²),速度与水平方向的夹角θ,tanθ=v yvxgt/vx2.平抛运动的位移及其方向水平位移x=vxt;竖直位移y=vyt-1/2gt²;合位移s=√(x²+y²),运动方向与初速度方向相同。
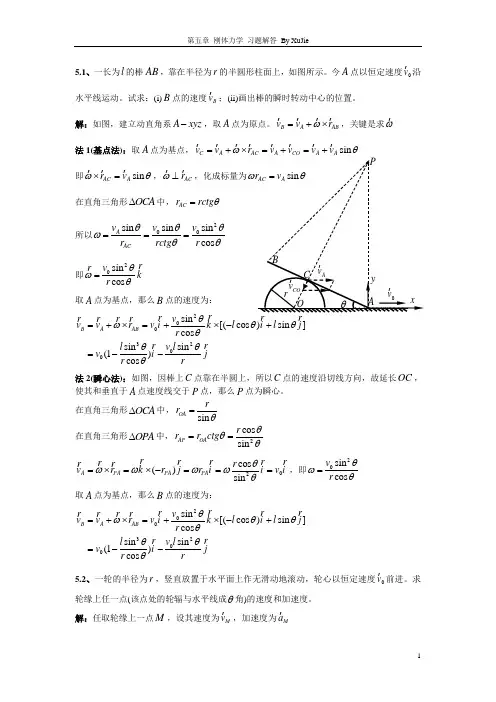
5.1、一长为l 的棒AB ,靠在半径为r 的半圆形柱面上,如图所示。
今A 点以恒定速度0v沿水平线运动。
试求:(i)B 点的速度B v;(ii)画出棒的瞬时转动中心的位置。
解:如图,建立动直角系A xyz -,取A 点为原点。
B A AB v v r ω=+⨯ ,关键是求ω法1(基点法):取A 点为基点,sin C A AC A CO A A v v r v v v v ωθ=+⨯=+=+即sin AC A r v ωθ⨯=,AC r ω⊥ ,化成标量为ω在直角三角形OCA ∆中,AC r rctg θ=所以200sin sin sin cos A AC v v v r rctg r θθθωθθ===即20sin cos v k r θωθ=取A 点为基点,那么B 点的速度为:2002300sin [(cos )sin ]cos sin sin (1)cos B A AB v v v r v i k l i l j r v l l v i jr rθωθθθθθθ=+⨯=+⨯-+=--法2(瞬心法):如图,因棒上C 点靠在半圆上,所以C 点的速度沿切线方向,故延长OC ,使其和垂直于A 点速度线交于P 点,那么P 点为瞬心。
在直角三角形OCA ∆中,sin OA r r θ=在直角三角形OPA ∆中,2cos sin AP OA r r r ctg θθθ==02cos ()sin A PA PA PA r v r k r j r i i v i θωωωωθ=⨯=⨯-===,即20sin cos v r θωθ= 取A 点为基点,那么B 点的速度为:2002300sin [(cos )sin ]cos sin sin (1)cos B A AB v v v r v i k l i l j r v l l v i jr rθωθθθθθθ=+⨯=+⨯-+=--5.2、一轮的半径为r ,竖直放置于水平面上作无滑动地滚动,轮心以恒定速度0v前进。
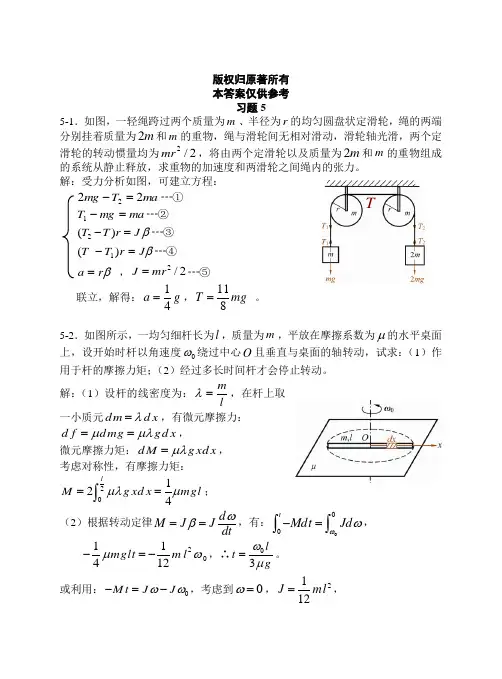
版权归原著所有 本答案仅供参考习题55-1.如图,一轻绳跨过两个质量为m 、半径为r 的均匀圆盘状定滑轮,绳的两端分别挂着质量为m 2和m 的重物,绳与滑轮间无相对滑动,滑轮轴光滑,两个定滑轮的转动惯量均为2/2mr ,将由两个定滑轮以及质量为m 2和m 的重物组成的系统从静止释放,求重物的加速度和两滑轮之间绳内的张力。
解:受力分析如图,可建立方程:ma T mg 222=-┄①ma mg T =-1┄②2()T T r J β-=┄③ βJ r T T =-)(1┄④βr a = ,2/2J m r =┄⑤联立,解得:g a 41=,mg T 811=。
5-2.如图所示,一均匀细杆长为l ,质量为m ,平放在摩擦系数为μ的水平桌面上,设开始时杆以角速度0ω绕过中心O 且垂直与桌面的轴转动,试求:(1)作用于杆的摩擦力矩;(2)经过多长时间杆才会停止转动。
解:(1)设杆的线密度为:lm =λ,在杆上取一小质元d m d x λ=,有微元摩擦力:d f d m g g d x μμλ==,微元摩擦力矩:d M g xd x μλ=, 考虑对称性,有摩擦力矩:20124lM g x d x m g l μλμ==⎰;(2)根据转动定律d M J Jdtωβ==,有:00t M d t Jd ωω-=⎰⎰,2011412m g l t m l μω-=-,∴03lt gωμ=。
或利用:0M t J J ωω-=-,考虑到0ω=,2112J m l =,T有:03lt gωμ=。
5-3.如图所示,一个质量为m 的物体与绕在定滑轮上的绳子相联,绳子的质量可以忽略,它与定滑轮之间无滑动。
假设定滑轮质量为M 、半径为R ,其转动惯量为2/2MR,试求该物体由静止开始下落的过程中,下落速度与时间的关系。
解:受力分析如图,可建立方程:m g T m a -=┄①βJ TR =┄② a R β= ,212J m R =┄③ 联立,解得:22m g a M m=+,2M m g T M m=+,考虑到dv a dt=,∴022v t m g dv dt M m=+⎰⎰,有:22m g t v M m=+。
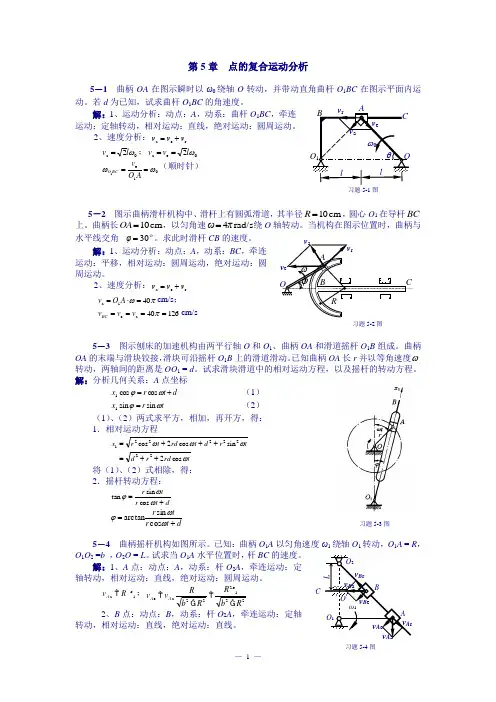
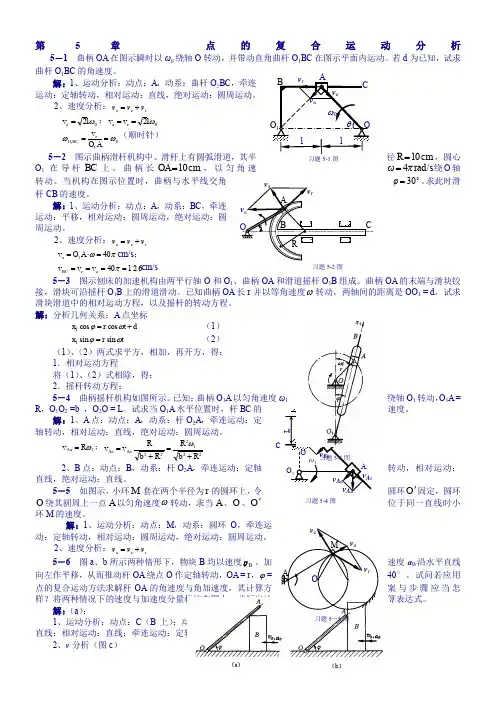
第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。
当机构在图示位置时,曲柄与水平线交角 30=φ。
求此时滑杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v +=πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程trd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 22222221++=+++=将(1)、(2)式相除,得: 2.摇杆转动方程: dt r tr +=ωωϕcos sin tandt r t r +=ωωϕcos sin arctan5-4 曲柄摇杆机构如图所示。
第五章 点的运动 习题全解[习题5-1] 一点按2123+-=t t x 的规律沿直线动动(其中t 要s 计,x 以m 计).试求:(1)最初s 3内的位移;(2)改变动动方向的时刻和所在位置;(3)最初s 3内经过的路程;(4)s t 3=时的速度和加速度;(5)点在哪段时间作加速度,哪段时间作减速运动. 解:(1)求最初s 3内的位移.m x 220120)0(3=+⨯-= m x 723123)3(3-=+⨯-=)(927)0()3(m x x x -=--=-=∆ (动点的位移为9m,位移的方向为负x 方向). (2)求改变动动方向的时刻和所在位置. 改变方向时,动点的速度为零.即: 01232=-==t dtdxv , 亦即:当s t 2=时,动点改变运动方向.此时动点所在的位置为: )(1422122)2(3m x -=+⨯-= (3)求最初s 3内经过的路程.)(23716|)14(7||214|)3~2()2~0()3~0(m S S S =+=---+--=+= (4)求s t 3=时的速度和加速度1232-==t dt dx v )/(151233)3(2s m dt dx v =-⨯== t dtdv a 6== )/(1836)3(2s m a =⨯=(5)求动点在哪段时间作加速度,哪段时间作减速运动.若v 与a 同号,则动点作加速运动; 若v 与a 异号,则动点作减速运动.即: 同号时有:0)2)(2(18)4(18)6)(123(22>+-=-=-=t t t t t t t va0)2)(2(>+-t t t20<<t .即当s t 20<<时,动点作加速动动.Oxy图题25-异号时有:0)2)(2(<+-t t t2>t即当s t 2>时,动点作减速运动.[习题5-2] 已知图示机构中,l AB OA ==,a AC DM CM ===,求出t ωϕ=时,点M 的动动方程和轨迹方程。
习 题5-1 如图5-13所示,偏心轮半径为R ,绕轴O 转动,转角tωϕ=(ω为常量),偏心距eOC=,偏心轮带动顶杆AB 沿铅垂直线作往复运动。
试求顶杆的运动方程和速度。
图5-13)(cos )sin(222t e Rt e y ωω-+=)(cos 2)2sin()[cos(222t e Rt e t e yv ωωωω-+==5-2 梯子的一端A 放在水平地面上,另一端B 靠在竖直的墙上,如图5-14所示。
梯子保持在竖直平面内沿墙滑下。
已知点A 的速度为常值v 0,M 为梯子上的一点,设MA = l ,MB = h 。
试求当梯子与墙的夹角为θ时,试点M 速度和加速度的大小。
图5-14A M x hl h h x +==θsin θc o s l y M =0c o s v hl h xhl h h x A M +=+== θθ得 θθcos )(0h l v +=θθθθθt a n)(c o s )(s i ns i n 0h l lv h l v l l yM +-=+⨯-=-= 0=M xθθθθθ3222020cos )(cos )(sec )(sec )(h l lv h l v h l lv h l lv y M +-=+⨯+-=+-=θ322cos )(h l lv a M +=5-3 已知杆OA 与铅直线夹角6/πt =ϕ(以 rad 计,t 以s计),小环M 套在杆OA 、CD 上,如图5-15所示。
铰O 至水平杆CD 的距离h =400 mm 。
试求t = 1 s 时,小环M 的速度和加速度。
图5-15ϕtan h x M =ϕϕϕ22s e c 6π400s e c ⨯== h x Mϕϕϕϕϕϕϕsi ns e c 9π200sin sec 6π3π400)sin sec 2(6π4003233=⨯⨯=⨯⨯= M x当s1=t 时6π=ϕm m /s3.2799π800346π400)6π(s e c 6π4002==⨯==M v 223232mm/s8.168327π80021)32(9π200)6πsin()6π(sec 9π200==⨯⨯=⨯⨯=M a5-4 点M 以匀速u 在直管OA 内运动,直管OA 又按tωϕ=规律绕O 转动,如图5-16所示。
第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴30=φ。
求此时滑转动。
当机构在图示位置时,曲柄与水平线交角杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v += πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 将(1)、(2)式相除,得: 2.摇杆转动方程:5-4 曲柄摇杆机构如图所示。
已知:曲柄O 1A 以匀角速度ω1绕轴O 1转动,O 1A = R ,O 1O 2 =b ,O 2O = L 。
试求当O 1A 水平位置时,杆BC 的速度。
解:1、A 点:动点:A ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。

第五章课后习题答案5.1 解:以振动平衡位置为坐标原点,竖直向下为正向,放手时开始计时。
设t 时刻砝码位置坐标为x ,由牛顿第二定律可知: 220)(dtx d mx x k mg =+-其中0x 为砝码处于平衡位置时弹簧的伸长量,所以有 0kx mg = 解出0x 代入上式,有:022=+x mk dtxd 其中 mk =ω可见砝码的运动为简谐振动简谐振动的角频率和频率分别为: s r a d x g mk /9.90===ω Hz 58.12==πων振动微分方程的解为)c o s (ϕω+=t A x由起始条件 t =0 时,,1.00m x x -=-= 0=v得: A =0.1m ,πϕ=振动方程为:)9.9cos(1.0π+=t x5.2 证明:取手撤去后系统静止时m 的位置为平衡位置,令此点为坐标原点,此时弹簧伸长为x ,则有: 0sinkx mg =θ (1)当物体沿斜面向下位移为x 时,则有: ma T mg =-1sin θ (2) βJ R T R T =-21 (3) )(02x x k T += (4)R a β= (5) 将(2)与(4)代入(3),并利用(5),可得: k x R R kx mgR a RJ mg --=+0sin )(θ利用(1)式可得 x RJ mR kR dtx d a +-==22所以物体作简谐振动因为 R J mR kR +=ω 所以振动周期为 ωπ2=T5.3 解: 因为 mk ππων212==所以 :1221m m =νν22121)(m m νν==2 Kg5.4 解:(1) 由振动方程)420cos(01.0ππ+=t x 可知:振幅A =0.01m ;圆频率 πω20=; 周期 s T 1.02==ωπ频率Hz 10=ν ;初相40πϕ=(2)把t =2s 分别代入可得:2005.0)420cos(01.0|2=+==ππt x t m2314.0)420sin(2.0|2-=+-===πππt dt dx v t m/s)420sin(4|22πππ+===t dtdv a t5.5 解: T =2s ,ππω==T2设振动方程为:)cos(10ϕπ+=t x则速度为:)s i n (10ϕππ+-=t v加速度为: )c o s (102ϕππ+-=t a根据t =0 时,x =5cm ,v < 0 的条件,得振动的初相为 3πϕ=,故振动方程为:)3cos(10ππ+=t x设在 1t 时刻振子位于cm x 6-=处,并向x 轴负方向运动,则有:53)3'c o s (-=+ππt 54)3's i n (=+ππt故有 s cm t v /1.25)3'sin(10-=+-=πππ22/2.59)3'cos(10s cm t a =+-=πππ设弹簧振子回到平衡位置的时刻为2t ,则有πππ2332=+t ,从上述位置回到平衡位置所需时间为: st t 8.0/)]3)53(arccos()323[(12=----=-ππππ5.6。

[习题解答]5-1 作定轴转动的刚体上各点的法向加速度,既可写为a n= v2 /R,这表示法向加速度的大小与刚体上各点到转轴的距离R成反比;也可以写为a n= ω2 R,这表示法向加速度的大小与刚体上各点到转轴的距离R成正比。
这两者是否有矛盾?为什么?解没有矛盾。
根据公式,说法向加速度的大小与刚体上各点到转轴的距离R成反比,是有条件的,这个条件就是保持v不变;根据公式,说法向加速度的大小与刚体上各点到转轴的距离R成正比,也是有条件的,条件就是保持ω不变。
5-2一个圆盘绕通过其中心并与盘面相垂直的轴作定轴转动,当圆盘分别在恒定角速度和恒定角加速度两种情况下转动时,圆盘边缘上的点是否都具有法向加速度和切向加速度?数值是恒定的还是变化的?解(1)当角速度ω一定时,切向速度也是一定的,所以切向加速度,即不具有切向加速度。
而此时法向加速度,可见是恒定的。
(2)当角加速度一定时,即恒定,于是可以得到,这表示角速度是随时间变化的。
由此可得.切向加速度为,这表示切向加速度是恒定的。
法向加速度为,显然是时间的函数。
5-3 原来静止的电机皮带轮在接通电源后作匀变速转动,30s后转速达到152 rad⋅s-1 。
求:(1)在这30 s内电机皮带轮转过的转数;(2)接通电源后20 s时皮带轮的角速度;(3)接通电源后20 s时皮带轮边缘上一点的线速度、切向加速度和法向加速度,已知皮带轮的半径为5.0 cm。
解(1)根据题意,皮带轮是在作匀角加速转动,角加速度为.在30 s内转过的角位移为.在30 s内转过的转数为.(2)在t = 20 s时其角速度为.(3)在t = 20 s时,在皮带轮边缘上r = 5.0 cm处的线速度为,切向加速度为,法向加速度为.5-4 一飞轮的转速为250 rad⋅s-1 ,开始制动后作匀变速转动,经过90 s停止。
求开始制动后转过3.14⨯103 rad时的角速度。
解飞轮作匀变速转动,,经过90 s,,所以角加速度为.从制动到转过,角速度由ω0变为ω,ω应满足.所以.5-5 分别求出质量为m = 0.50 kg、半径为r = 36 cm的金属细圆环和薄圆盘相对于通过其中心并垂直于环面和盘面的轴的转动惯量;如果它们的转速都是105 rad⋅s-1 ,它们的转动动能各为多大?解(1)细圆环:相对于通过其中心并垂直于环面的轴的转动惯量为,转动动能为.(2)相对于通过其中心并垂直于盘面的轴的转动惯量为,转动动能为.5-6 转动惯量为20 kg⋅m2 、直径为50 cm的飞轮以105 rad⋅s-1 的角速度旋转。
第5章 点的运动学习题1.是非题(对画√,错画×)5-1.某瞬时动点的速度为零,则动点的加速度必为零。
( ) 5-2.某瞬时动点的加速度为零,则动点的速度必为零。
( ) 5-3.切向加速度是表示动点速度的方向对时间的导数。
( ) 5-4.法向加速度是表示动点速度的大小对时间的导数。
( ) 5-5.点作曲线运动时,法向加速度是不等于零的。
( ) 5-6.点作运动时,法向加速度是等于零的。
( ) 5-7.点作直线运动时,切向加速度是等于零的。
( ) 5-8.轨迹曲线的曲率半径为无穷大时,点作直线运动。
( ) 5-9.点作匀变速运动时,切向加速度大小保持不变。
( ) 5-10.法向加速度的方向是恒指向轨迹曲线的曲率中心。
( ) 2.填空题(把正确的答案写在横线上)5-11.点作直线运动时,法向加速度等于 。
5-12.点作匀速曲线运动时,切向加速度等于 。
5-13.点运动方程t ωcos r x =、t sin ωr y =,点的轨迹方程 。
5-13.点运动方程222t cos x =、222t sin y =,当0=t 时点的速度=v ;点的加速度=a ;轨迹的曲率半径ρ= 。
5-14.点作曲线运动时,其点的加速度在 面内。
5-15.点的次法向加速度=b a 。
3.简答题5-16.点在下述情况下作何种运动 (1)0=τa ,0=n a ; (2)0≠τa ,0=n a ; (3)0=τa ,0≠n a ;(4)0≠τa ,0≠n a ;5-17.dt d v 与dtdv 的区别是什么?5-18.当点作曲线运动时,点的加速度是恒矢量,问点作匀速曲线运动吗?为什么? 5-19.写出描述动点直角坐标法和自然法的运动方程之间的关系。
5-20.若点沿已知的轨迹曲线运动时,其运动方程为242t s +=,t 为时间,则点作怎样的运动?4.计算题5-21.如图所示的平面机构中,曲柄OC 以角速度ω绕O 轴转动,图示瞬时与水平线夹角t ω=ϕ,A 、B 滑块分别在水平滑道和竖直滑道内运动,试求AB 中点M 的运动方程、速度和加速度。
哈尔滨工业大学理论力学教研室理论力学(I)第8版习题答案《理论力学(1 第8版)/“十二五”普通高等教育本科国家级规划教材》第1版至第7版受到广大教师和学生的欢迎。
第8版仍保持前7版理论严谨、逻辑清晰、由浅入深、宜于教学的风格体系,对部分内容进行了修改和修正,适当增加了综合性例题,并增删了一定数量的习题。
本书内容包括静力学(含静力学公理和物体的受力分析、平面力系、空间力系、摩擦),运动学(含点的运动学、刚体的简单运动、点的合成运动、刚体的平面运动),动力学(含质点动力学的基本方程、动量定理、动量矩定理、动能定理、达朗贝尔原理、虚位移原理)。
本书可作为高等学校工科机械、土建、水利、航空、航天等专业理论力学课程的教材,也可作为高职高理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案专、成人高校相应专业的自学和函授教材,亦可供有关工程技术人员参考。
本书配套的有《理论力学学习辅导》、《理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案理论力学思考题集》、《理论力学解题指导及习题集》(第3版)、《理论力学电子教案》、《理论力学网络课程》、《理论力学习题解答》、《理论力学网上作业与查询系统》等。
理论力学(I)第8版哈尔滨工业大学理论力学教研室课后答案前辅文静力学关注网页底部或者侧栏二维码回复理论力学(I)第8版答案免费获取答案引言第一章静力学公理哈尔滨工业大学理论力学教研室理论力学(I)第8版课后答案理论力学思考题集》、《理论力学解题指导及习题集》(第3版)、《理论力学电子教案》、《理论力学网络课程》、《理论力学习题解答》、《理论力学网上作业与查询系统》等。
理论力学(I)第8版哈尔滨工业大学理论力学教研室课后答案前辅文静力学引言第一章静力学公理和物体的受力分析第二章平面力系第三章空间力系第四章摩擦理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案§4-4 滚动摩阻的概念运动学引言第五章点的运动学*§5-5 点的速度和加速度在球坐标中的投影思考题习题第六章刚体的简单运动§6-1 刚体的平行移动§6-2 刚体绕定轴的转动§6-3 转动刚体内各点的速度和加速度§6-4 轮系的传动比§6-5 以矢量表示角速度和角加速度·以矢积表示点的速度和加速度思考题习题第七章点的合成运动第八章刚体的平面运动动力学引言第九章质点动力学的基本方程第十章动量定理第十一章动量矩定理第十二章动能定理第十三章达朗贝尔原理第十四章虚位移原理参考文献习题答案索引Synopsis哈尔滨工业大学理论力学教研室理论力学(I)第8版课后答案第十四章虚位移原理。
第五章 刚体的定轴转动一 选择题1. 一绕定轴转动的刚体,某时刻的角速度为ω,角加速度为α,则其转动加快的依据是:( )A. α > 0B. ω > 0,α > 0C. ω < 0,α > 0D. ω > 0,α < 0解:答案是B 。
2. 用铅和铁两种金属制成两个均质圆盘,质量相等且具有相同的厚度,则它们对过盘心且垂直盘面的轴的转动惯量。
( )A. 相等;B. 铅盘的大;C. 铁盘的大;D. 无法确定谁大谁小解:答案是C 。
简要提示:铅的密度大,所以其半径小,圆盘的转动惯量为:2/2Mr J =。
3. 一轻绳绕在半径为r 的重滑轮上,轮对轴的转动惯量为J ,一是以力F 向下拉绳使轮转动;二是以重量等于F 的重物挂在绳上使之转动,若两种情况使轮边缘获得的切向加速度分别为a 1和a 2,则有: ( )A. a 1 = a 2B. a 1 > a 2C. a 1< a 2D. 无法确定解:答案是B 。
简要提示:(1) 由定轴转动定律,1αJ Fr =和11αr a =,得:J Fr a /21=(2) 受力分析得:⎪⎩⎪⎨⎧===-2222ααr a J Tr ma T mg ,其中m 为重物的质量,T 为绳子的张力。
得:)/(222mr J Fr a +=,所以a 1 > a 2。
4. 一半径为R ,质量为m 的圆柱体,在切向力F 作用下由静止开始绕轴线作定轴转动,则在2秒内F 对柱体所作功为: ( )A. 4 F 2/ mB. 2 F 2 / mC. F 2 / mD. F 2 / 2 m解:答案是A 。
简要提示:由定轴转动定律: α221MR FR =,得:mRF t 4212==∆αθ 所以:m F M W /42=∆=θ5. 一电唱机的转盘正以ω 0的角速度转动,其转动惯量为J 1,现将一转动惯量为J 2的唱片置于转盘上,则共同转动的角速度应为: ( )A .0211ωJ J J +B .0121ωJ J J +C .021ωJ JD .012ωJ J 解:答案是A 。
第五章 点的运动学答 案5-1表示的是点的全加速度,表示的是点的加速度的大小;表示的是点的速度,表示的是速度在柱坐标或球坐标中沿矢径方向的投影。
5-2图示各点的速度均为可能,在速度可能的情况下,点C,E,F,G的加速度为不可能,点A,B,D的加速度为可能。
5-3根据点M运动的弧坐标表达式,对时间求导可知其速度大小为常数,切向加速度为零,法向加速度为。
由此可知点M的加速度越来越大,点M跑得既不快,也不慢,即点M作匀速曲线运动。
5-4点作曲线运动时,点的加速度是恒矢量,但点的切向加速度的大小不一定不变,所以点不一定作匀变速运动。
5-5既然作曲线运动的两个动点的初速度相同、运动轨迹相同、法向加速度也相同,则曲线的曲率半径也相同,可知上述结论均正确。
若两点作直线运动,法向加速度均为零,任一瞬时的切向加速度不一定相同,从而速度和运动方程也不相同。
5-6因为 y =f (x ),则x y v dx dy v =,因为x v 已知,且0≠x v 及dxdy 存在的情况下,可求出y v ,由22y x v v v +=,v v x =αcos ,vv y =βcos ,可求出 ,从而dt dv a t =,dtv d a =则 可确定。
在0=x v 的情况下,点可沿与 y 轴平行的直线运动,这时点的速度不能完全确定。
若dxdy 不存在,则y v 也不能确定。
在 已知且有时间函数的情况下,x x va =可以确定。
5-7(1)点沿曲线作匀速运动,其切向加速度为零,点的法向加速度即为全加速度。
(2)点沿曲线运动,在该瞬时其速度为零,则点的法向加速度为零,点的切向加速度即为全加速度。
(3)点沿直线作变速运动,法向加速度为零,点的切向加速度即为点的全加速度。
(4)点沿曲线作变速运动,三种加速度的关系为t n a a a +=。
5-8(1)不正确;(2)正确;(3)不正确。
5-9用极坐标描述点的运动,是把点的运动视为绕极径的转动和沿极径运动的叠加,2ϕρρ -=a 和ϕa 中的ϕρ 出现的原因是这两种运动相互影响的结果。
习 题5-1 如图5-13所示,偏心轮半径为R ,绕轴O 转动,转角t ωϕ=(ω为常量),偏心距e OC =,偏心轮带动顶杆AB 沿铅垂直线作往复运动。
试求顶杆的运动方程和速度。
图5-13)(cos )sin(222t e R t e y ωω-+=)(cos 2)2sin()[cos(222t e R t e t e y v ωωωω-+==5-2 梯子的一端A 放在水平地面上,另一端B 靠在竖直的墙上,如图5-14所示。
梯子保持在竖直平面内沿墙滑下。
已知点A 的速度为常值v 0,M 为梯子上的一点,设MA = l ,MB = h 。
试求当梯子与墙的夹角为θ时,试点M 速度和加速度的大小。
图5-14A M x hl hh x +==θsin θcos l y M = 0cos v hl h x h l h h x A M +=+== θθ 得 θθcos )(0h l v += θθθθθtan )(cos )(sin sin 00h l lv h l v l l y M +-=+⨯-=-=0=M xθθθθθ322002020cos )(cos )(sec )(sec )(h l lv h l v h l lv h l lv y M +-=+⨯+-=+-= θ322cos )(h l lv a M+=5-3 已知杆OA 与铅直线夹角6/πt =ϕ(ϕ 以 rad 计,t 以s 计),小环M 套在杆OA 、CD 上,如图5-15所示。
铰O 至水平杆CD 的距离h =400 mm 。
试求t = 1 s 时,小环M 的速度和加速度。
图5-15ϕtan h x M =ϕϕϕ22sec 6π400sec ⨯== h xM ϕϕϕϕϕϕϕsin sec 9π200sin sec 6π3π400)sin sec 2(6π4003233=⨯⨯=⨯⨯= M x当s 1=t 时6π=ϕ mm/s 3.2799π800346π400)6π(sec 6π4002==⨯==M v223232mm/s 8.168327π80021)32(9π200)6πsin()6π(sec 9π200==⨯⨯=⨯⨯=M a5-4 点M 以匀速u 在直管OA 内运动,直管OA 又按t ωϕ=规律绕O 转动,如图5-16所示。
当t = 0时,M 在点O 处,试求在任一瞬时点M 的速度和加速度的大小。
图5-16)cos(t ut x ω= )sin(t ut y ω=)sin()cos(t t u t u x ωωω-= )cos()sin(t t u t u y ωωω+=)cos()sin()sin(2t t u t u t u xωωωωωω---= )]cos()sin(2[t t t u ωωωω+-= )]sin()cos()[cos(t t t t u y ωωωωω-+= )]sin()cos(2[t t t u ωωωω-=222)(1t u y xv ω+=+=222)(4t u yx a ωω+=+=5-5 点沿曲线AOB 运动,如图5-17所示。
曲线由AO 、OB 两段圆弧组成,AO 段半径R 1= 18m ,OB 段半径R 2= 24m ,取圆弧交接处O 为原点,规定正方向如图。
已知点的运动方程s =3 +4t – t 2,t 以s 计,s 以m 计。
试求:(1) 点由t = 0 到t = 5 s 所经过的路程;(2)t = 5 s 时点的加速度。
图5-17243t t s -+= t sv 24-== 0=v 时s 2=t 3)0(=s 7)2(=s 2)5(-=s由t = 0 到t = 5 s 所经过的路程 m 13|72|)37(=--+-=s 2τ-=a 2122n m/s 2836)104(==-==R R v a2222n 2τm/s 828.22222==+=+=a a a5-6 图5-18所示的摇杆滑道机构中的滑块M 同时在固定的圆弧槽BC 和摇杆OA 的滑道中滑动。
如BC 的半径为R ,摇杆OA 的轴O 在弧BC 的圆周上。
摇杆绕轴O 以等角速度ω转动,当运动开始时,摇杆在水平位置。
试分别用直角坐标法和自然法给出点M 的运动方程,并求其速度和加速度。
图5-18直角坐标法)2cos 1(cos t R R R x ωθ+=+= t R R y ωθ2sin sin ==t R xωω2sin 2-= t R y ωω2cos 2= t R xωω2cos 42-= t R y ωω2sin 42-= ωR y xv 222=+=2224ωR yx a =+= 自然法t R t R s ωω22=⨯=ωR sv 2== 0τ==sa 22n 4ωρR v a ==5-7 小环M 在铅垂面内沿曲杆ABCE 从点A 由静止开始运动,如图5-19所示。
在直线段AB 上,小环的加速度为g ;在圆弧段BCE 上,小环的切向加速度ϕτcos g a =。
曲杆尺寸如图所示,试求小环在C 、D 两处的速度和加速度。
图5-19在直线段ABR v R v B B g 2g 2022==- 圆弧段BCEϕcos g τ=a R st v cos g d d = R s t s s v cos g d d d d =⨯ R s s v v cos g d d = ⎰⎰=s v v s Rs v v B 0d cos g d Rs R v v B sin g )(2122=- 在C 处2πsin g )(2122R v v B C =- R R v v B C g 4g 222=+=R v C g 2=0τ=C ag 42n==Rv a C C g 4g)4(0222n 2τ=+=+=C C C a a a 在D 处4π3sing )(2122R v v B D =- R R v v B D g )22(22g 222+=⨯+=R R v D g 848.1g )22(=+= g 224π3cosg τ-==D a g )22(2n+==Rv a D D g 487.3g 245.6g )22()22(222n 2τ=+=++-=+=D D D a a a5-8 点M 沿给定的抛物线22.0x y = 运动(其中x 、y 均以m 计)。
在x = 5 m 处,m/s 4=v ,2m/s 3=τa 。
试求点在该位置时的加速度。
22.0x y = x x y 4.0= )(4.02xx x y += 22y xv +=vy y x x v y y x x v a +=+==222τ 在x = 5 m 处,m/s 4=v ,2m/s 3=τa 。
即:4)54.0(22=⨯⨯+x x2.32=x 2.3=x 2.32=y 34=+yy x x 122.322.3=+y x2.3122=+yx (1) 由)(4.02x x x y += )52.3(4.0xy += x y 228.1+= (2) 联立(1)(2)求得8296.05)56.22.312(=-=x9392.2=y222m/s 054.3=+=yx a5-9 点沿空间曲线运动,如图5-20所示,在点M 处其速度为j i v 34+=,加速度a 与速度v 的夹角︒=30β,且a =10 m/s 2。
试计算轨迹在该点的曲率半径ρ和切向加速度τa 。
图5-202τm/s 66.83530cos 10cos ==︒⨯==βa a 2n m /s 530sin 10sin =︒⨯==βa aρ2n v a = m 5552n 2===a v ρ5-10 点沿螺旋线运动,其运动方程为:)2/(,sin ,cos πωωωt h z t R y t R x ===,式中,R 、h 、ω均为常量。
设t =0时 s 0 = 0,试建立点沿轨迹运动的方程s = f (t ),并求点的速度、加速度的大小和曲率半径。
222)(d )(d )(d d z y x s ++=t h t R t R d )π2()cos ()sin (222ωωωωω++-= t h R d π2π4222ω+=222π4π2h R ts +=ω222π4π2h R sv +==ωt R x a x ωωcos 2-== t R ya y ωωsin 2-== 0==z a z 2ωR a = 0τ==v a 2n ωR a a ==Rh R a v 22n 2π4+==ρ5-11 点在平面上运动,其轨迹的参数方程为)3/sin(π44),3/sin(π2t y t x +==,设t =0时,s 0=0;s 的正方向相当于x 增大方向。
试求轨迹的直角坐标方程)(x f y =、点沿轨迹运动的方程)(t s s =、点的速度和切向加速度与时间的函数关系。
轨迹的直角坐标方程 42+=x x 点沿轨迹运动的方程t tx y x s d 3πcos 3π52d 5)(d )(d d 22==+=(m)3πsin 472.43πsin525tt x s === s)(m /3πcos 683.43πcos 3π52t t sv === )(m /s 3πsin 904.43πsin 9π5222τt t v a -=-==5-12 已知动点的运动方程为:t y t t x 22=-=,。
试求其轨迹方程和速度、加速度。
并求当t =1s 时,点的切向加速度、法向加速度和曲率半径。
x 、y 的单位为m ,t 的单位为s 。
轨迹方程2)2(2y y x -= 0422=--x y y速度、加速度12-==t xv x 2==y v y 5442+-=t t v 2==xa x 0==y a y 2m/s 2=a vt v t va 24248τ-=-== 当t =1s 时 5=v52524τ=-=a 52524τ=-=a 789.12.3)52(2222τ2n ==-=-=a a am 795.22.35n2===a v ρ5-13 如图5-21所示,动点A 从点O 开始沿半径为R 的圆周作匀加速运动,初速度为零。
设点的加速度a 与切线间的夹角为θ,并以β表示点所走过的弧长s 对应的圆心角。
试证:βθ2tan =。
图5-21常量cos τ===θa va θcos at v =θcos 212at s =θsin 2n a Rv a ==βθθθθ22cos cos )cos (tan 22τn =====RsR at Ra at a a5-14 已知点作平面曲线运动,其运动方程为:x = x (t ),y = y (t )。
试证在任一瞬时动点的切向加速度、法向加速度及轨迹曲线的曲率半径分别为:xy y x y xy xx y y x a y xy y x x a n -+=+-=++=23222222)(ρτ22y xv +=22y x a += 2222τ222y xyy x x y x y y x x v a ++=++== 22222222τ2n ||)(y xx y y x y xy y x x yx a a a +-=++-+=-=xy y x y xa v -+==2322n 2)(ρ。