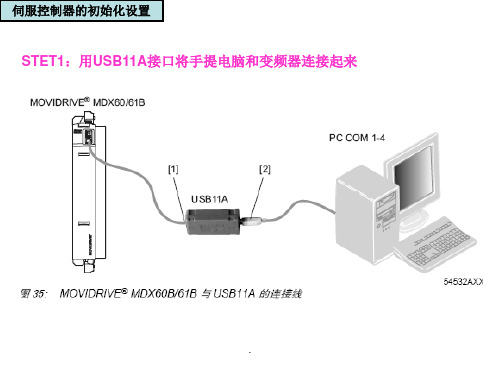
SEW伺服程序下载步骤
- 格式:doc
- 大小:16.50 KB
- 文档页数:3



1配置:①驱动器MDX61B… ②编码器板DER11B③同步伺服电机-带增量型编码器…CM…RH1M(L)2系统架构:L1L2L3PECM / CMP(Z)同步伺服电机1. 水平驱动2. 升降驱动硬件接线:水平驱动(对于CM..71-112机座号同步伺服电机,通常制动器为380V AC带BME制动整流块!)3PLC驱动器输出U,V,W驱动器处编码器连接为D型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号硬件接线:水平驱动(对于CM..56-63机座号同步伺服电机,通常制动器为24VDC!)4PLC型插头驱动器输出U,V,W硬件接线:升降驱动!! (对于SEW-71机座号以上同步伺服电机,通常制动器为380V AC带BME制动整流块!)(建议:制动器采用快速制动;PLC保护制动)(防止溜车,及意外坠落)5PLC驱动器输出U,V,WD型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号6/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Unipolar/fixed setpoint;(单极性模拟量/固定点设定)101→设为Terminals;(端子控制)112→设为10 V, reference maximum speed;(0-10V模拟量控制)或4-20 mA, reference maximum speed;(4-20 mA模拟量控制)与S11开关的拨码位置必须对应,否则驱动器将会按最大速度输出130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)160 →设为所需值;(接通n11/n21固定速度端子时,电机运行速度)161 →设为所需值;(接通n12/n22固定速度端子时,电机运行速度)162 →设为所需值;(接通n13/n23固定速度端子时,电机运行速度)200 →设为所需值;(电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值)201 →设为所需值;(电机的速度环时间常数,建议值40-80)301 →设为0;(输出最小转速);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为CW/stop;(正转)601 →设为CCW/stop;(反转)602 →设为Enable/stop;(输出使能)603 →设为n11/n21;(固定速度1)604 →设为n12/n22;(固定速度2)7620 →设为/Fault;(故障报警)621 →设为Rotating field ON;(电机是否运行)700 →设为Servo;(伺服速度闭环控制模式)731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)模拟量控制电压或电流信号选择电磁干扰屏蔽安装要求伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属8夹可靠紧固,大面积接地编码器线需采用专用带屏蔽层双绞线,并用金属夹将屏蔽层可靠紧固接地,屏蔽层从头至尾不应有断层。

SEW伺服电机使用说明一、硬件连接[1] X1:电源连接 L1 (1) / L2 (2) / L3 (3),可分离[2] X4:DC 侧连接 –U Z / +U Z,可分离[3] 记忆卡[4] 7 段数码管显示[5] X 终端:DBG60B 操作面板的插口或串行接口 UWS21A[6] DIP 开关 S11 ~ S14[7] X12:电子接线板,用于系统总线 (SBus)[8] X11:电子接线板,设定值输入端 AI1 和 10V 基准电压[9] X13:电子接线板,用于二进制输入端和RS-485 接口[10] X16:电子接线板,用于二进制输入端和二进制输出端[11] X10:电子接线板,用于二进制输出端和TF/TH 输入端[12] X17:电子接线板,用于安全停机的安全触头[13] X2:电机连线 U (4) / V (5) / W (6) 和 PE 连接,可分离[14] 电子屏蔽夹和 PE 连接[15] X3:制动电阻连接 R+ (8) / R– (9) 和 PE 连接,可分离[16] 编码器插槽[17] 扩展插槽[18] 现场总线插槽电器原理图及接线图见附件4(硬件图纸)。
不同编码器接线图见附件3(相关资料)中MDX61B中文操作手册55-65页。
制动电阻选型:根据电机功率和应用方式进行选择。
1.制动电阻参数:配合11kw控制器:大于22欧姆,推荐39欧姆 2.5kw配合4kw控制器:大于68欧姆,推荐100欧姆 2kw 升降驱动配合1.5kw控制器:大于68欧姆,推荐100欧姆 800w 升降驱动配合1.1kw控制器:大于68欧姆,推荐100欧姆600w配合1kw控制器:大于68欧姆,推荐100欧姆500w配合0.75kw控制器:大于68欧姆,推荐100欧姆400w配合0.55kw控制器:大于68欧姆,推荐100欧姆 200w配合0.37kw控制器:大于68欧姆,推荐100欧姆 450w2. 上海鹰峰科技(制动电阻厂家)电话:021-57847739(直线)021-57810277-801、802 王扶林其他注意事项:1、再调试时,要在伺服控制器X13接口板的DI00管脚处串入急停按钮,以确保发生紧急情况时,能够紧急停止;同时,在对伺服控制器参数进行调整时,也必须断掉DI00处使能,然后经过改动的数据才能下载。

步骤一。
进入主界面点击桌面上的图标,进入到界面。
默认等级为4级。
关掉,选择。
步骤二。
展开主菜单点击便可以展开主菜单。
如果不小心关掉了主菜单,点击主界面的,主菜单将重新弹出。
步骤三。
断开软件使能在下载驱动器参数时,必须断开驱动器使能。
点击主对话框中的,进入界面,点击,设置F1F0 = ,选择,,驱动器的软件使能便断开。
软件使能断开后,主界面的电机状态显示为,此时驱动器显示灯中间的黄灯为常亮状态。
步骤四。
下载程序断开驱动器软件使能后,便可下载软件到驱动器。
点击主界面的,在中选择你需要下载的程序。
步骤五。
更改管理员级别程序下载完成后,需要更改管理员级别。
点击主界面中的,选择第6级,密码为768。
从高级别进入低级别不需要密码。
步骤六。
电机编码器自整定在选择编码器自整定时,先要确定驱动器是否处在软件使能断开状态,管理员级别是否为第6级。
如果不是,请分别对应步骤三,步骤五来修改。
选择主界面的,进入界面。
选中,确定编码器类型是否为默认值RS_RS(1)。
单击,等待几秒钟,驱动器做完一次编码器自整定后,后面的数字会改变。
记住后面数字的高两位,图示的编码器高两位为64 ;再次单击,等待几秒钟,待驱动器再次做完编码器自整定后,比较此时后面数字的高两位是否变化,即数字 64 有没有变化。
如果不变,编码器自整定可完成,按图示标号顺序来完成自整定。
如果每做次编码器自整定,后面数字的高两位都在变化,说明编码器安装有问题,请检测电机编码器及其安装是否正常。
步骤七。
电机辨向做完电机编码器自整定后,得确认电机的三相电源线相序是否正确。
点击主界面的便进入测试界面。
选择控制模式为速度控制,给定速度中输入速度值为60 ,选择开始。
比较电机的实际速度,图标识为4所示的数字63.98。
如果图标识为4所示的数字和给定速度相差很大,比如只有几转或是负数转,而且此时软件检测到的电机电流很大时,则说明电机的电源线U,V,W相序接反,任意对调其中的两相线,重新做电机编码器自整定。
SEW伺服控制器调试方法一.硬件组态1.选择所要组态的过程通道数,前三个过程值的含义可以在参数中设定,后面的过程值可在IPOS程序中调用。
(南玻镀膜线腔体溅射区的伺服电机组态为3PD,进出口区选择10PD)图1.选择组态过程通道数2.组态好,PLC会自动为该控制器分配地址(以3PD为例),分配了3个字的输入和3个字的输出。
图2.硬件组态完成画面二.控制器程序1.过程值分为过程输出字和过程输入字。
过程输出值为PLC→控制器的数值,包括控制字和设定值;过程输入值为控制器→PLC的数值,包括状态字和实际值。
(如图3示意)图3.过程值描述2.过程值的定义要靠控制器参数设置来完成。
打开MOVITOOLS的MT-MANAGER画面,如图4图4. MOVITOOLS的MT-MANAGER画面点击“Shell”,进入参数设置画面,点开第8组参数的87.Process data description,按照图5进行设置。
图5. Process data description参数组设置3.一个典型控制系统伺服电机程序如下:#include <constb.h>#include <iob.h>MOVLNK Spd;MLDA TA Spd_Data;tasc2(){}tasc3(){ /*--------------------------------------------------------读PO值(from PLC) 把PLC中设定的值送入伺服控制器中--------------------------------------------------------*/H150=3; //定义GetSys()的总线类型H151=3; //定义GetSys()的PO数量,这里是3个PO_GetSys( H150,GS_PODA TA ); //把PLC中的变量送入伺服控制器中注3.2/*--------------------------------------------------------写PI值(to PLC)--------------------------------------------------------*/H410=3; //如果是三个PD以上的,H+0必须是PD个数//H411为Status Words 1 从P873中设定PI1//H412是实际的速度,从P874中设定H413=H483;_SetSys( SS_PIDA TA,H410 ); 注3.3}/*=============================================Main Function (IPOS Entry Function)===============================================*/main(){}几点注明:3.1程序里的Hxxx(如H150,H410,H483)表示控制器程序内部存储空间,相当于Step7里的M中间变量,但Hxxx有些是作固定用处的,可以在打开IPOS编程画面中点击Display-->All V ariables来查看Hxxx。
一. 首先完成主电路和控制部分接线,完成上电测试,上电变频器七段数码管显示1。
二. 在使用相同的伺服电机且有备份程序情况下,可选择传输备份程序。
1.打开软件MT-manage.
2.联机,见图片。选择PC interface:COM7(USB),Update.出现电机型号后,可终止Update。
3.点击shell.出现下面图面。
4.选择copy unit data,出现下面画面。
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
三.没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:
1.点击start-up.出现下面画面。注意控制器和马达的型号和参数。
2.点击Start-up Set 1.出现下面画面。
3.选择Execute complete start-up.点击“下一步”按钮。出现下面画面。
4注意马达型号和其他参数。点击“下一步”。出现下面画面
5.选择“下一步”出现下面画面。
6.选择Positioning with IPOS.点击“下一步”。出现下面画面。
inertia 选择电机带动负载重量(工程经验值J0 motor 参数的5-8倍)。选择完后,点击
“下一步”,出现下面画面。
8.设置电流极限值(200℅)、转速监视时间(1S)。.再点击“下一步’,出现下一画面。
9.控制器参数接受建议值,点击”Apply proposal”.再点击“下一步’,出现下一画面。
10.可使用参考值,点击”Apply proposal”.但是100和101参数须改为fieldbus,再点击
“下一步’,出现download 画面。
11.点击download,把参数下载下去。
12.打开软件。
参数6。Terminal assignment设置参照实际输入输出。
参数870-876设置可参考下面
执行下载然后点击“start”按钮或闪电标记。
13.选择手动操作,验证控制器和电机接线是否正确;刹车是否正常释放;机械是否卡堵或
过载。
在进行手动操作测试前,要保证DI00=1 即X13 的第1 个端子要有24VDC 。
程序下载方法:
打开软件,与控制器连接上。打开“机器人夹具最终。IPC”。