激光雷达回波信号及处理方法分析
- 格式:doc
- 大小:24.50 KB
- 文档页数:5

相干激光测风雷达信号处理系统研究李河均;张鹏飞;潘静岩;董光焰【摘要】介绍了基于相干探测方式的多普勒激光测风雷达的基本组成结构和原理,着重对激光测风雷达的信号处理系统进行了研究.文中给出了信号处理系统中所采用的多普勒信号处理方法,对采集到的多普勒回波信号进行了仿真研究.采用商业数据采集卡和LABVIEW软件,设计了相干激光测风雷达信号处理系统,并通过搭建的平台实现了激光视向风速的测量.通过模拟的多普勒回波信号,对信号处理系统进行了测试验证,实验结果证明了该信号处理系统能够达到0.8 m/s的速度测量精度.【期刊名称】《激光与红外》【年(卷),期】2013(043)010【总页数】4页(P1113-1116)【关键词】相干探测;激光测风雷达;信号处理【作者】李河均;张鹏飞;潘静岩;董光焰【作者单位】中国电子科技集团公司第二十七研究所,河南郑州450047;中国电子科技集团公司第二十七研究所,河南郑州450047;中国电子科技集团公司第二十七研究所,河南郑州450047;中国电子科技集团公司第二十七研究所,河南郑州450047【正文语种】中文【中图分类】TN958.981 引言对风场的探测研究,在气象、军事、航空和新能源等多个方面都具有重要的意义。
目前常用的风场遥感测量的手段有微波雷达、超声波雷达以及激光雷达。
激光雷达由于工作波长在0.1~10 μm,比微波雷达小,因此在风场测量方面有独特的优点。
激光雷达主要有多普勒测量和多光束测量两种测量方式[1]。
激光多普勒测风雷达基于激光多普勒效应来实现,根据工作方式又可以分为相干多普勒激光测风雷达和直接探测多普勒测风雷达[2-4]。
相干多普勒激光测风雷达利用光外差探测技术获得激光多普勒频移信息。
国外许多研究成果已经证明了相干多普勒激光雷达是测量风场和运动目标速度的有效手段[5-6]。
2 相干激光测风雷达组成结构本文采用相干激光测风雷达结构框图如图1所示,设计搭建的相干激光测风雷达实验系统照片如图2所示。


激光雷达多普勒效应介绍激光雷达是一种通过发射激光束并接收反射信号来测量目标距离和速度的传感器。
其中,多普勒效应是激光雷达中重要的原理之一。
本文将对激光雷达多普勒效应进行全面、详细、完整且深入的探讨。
多普勒效应的原理多普勒效应是指当波源和观察者相对运动时,波的频率会发生变化的现象。
在激光雷达中,多普勒效应用于测量目标的速度。
当激光束射向一个运动目标时,目标会反射出回波信号,回波信号的频率与目标的运动速度有关。
激光雷达多普勒测速原理激光雷达利用多普勒效应进行速度测量的原理如下: 1. 发射:激光雷达发射一束激光束。
2. 反射:激光束碰撞到目标物体上并发生反射。
3. 接收:激光雷达接收到目标物体反射回来的激光束信号。
4. 分析:通过分析接收到的信号,提取出频率信息。
5. 频率变化:根据多普勒效应,提取出频率变化的信息,即目标物体的速度信息。
6. 计算:通过测量频率变化的速度,计算出目标物体的实际速度。
多普勒效应的数学表达式多普勒效应的数学表达式如下:Δf = 2 * v * f / c其中,Δf为接收到的频率变化量,v为目标物体的速度,f为发射激光的频率,c 为光速。
多普勒效应的应用速度测量激光雷达的主要应用之一是测量目标物体的速度。
通过测量接收到的频率变化量,可以计算出目标物体的速度。
行人检测利用多普勒效应,激光雷达可以检测行人的运动。
通过分析频率变化的模式,可以判断行人是在静止还是移动,并进一步分析其运动方向和速度。
避障和自动驾驶多普勒效应在避障和自动驾驶系统中也有重要应用。
通过测量车辆和障碍物之间的频率变化,可以判断障碍物的运动状态和速度,从而及时采取避让措施或调整行驶方向。
多普勒效应的优缺点优点1.非接触式测量:激光雷达可以在不接触目标物体的情况下,通过反射信号进行测量。
2.高精度:由于激光束具有较短的波长,因此激光雷达可以实现高精度的速度测量。
3.远距离测量:激光雷达可以实现较远距离的速度测量,适用于各种场景。

雷达信号处理中的目标检测与跟踪技术雷达(Radar)是一种利用电磁波进行探测和测距的技术,广泛应用于军事、航空航天以及民用领域。
雷达信号处理中的目标检测与跟踪技术是在雷达应用过程中必不可少的环节,旨在提取目标信息并实现对目标的实时跟踪。
目标检测是雷达信号处理的第一步,其目的是从杂波中识别出目标信号。
在目标检测中,常用的方法有能量检测法、匹配滤波法和统计检测法等。
能量检测法是一种基于信号能量的方法,当接收到的信号能量超过一定阈值时,认为检测到了目标。
匹配滤波法则是将已知目标的参考信号与接收到的信号进行相关运算,通过寻找相关峰值来检测目标。
统计检测法则是基于统计学原理进行目标检测,利用雷达回波信号的统计特性来判断是否存在目标。
目标跟踪是在目标检测的基础上,对目标进行实时跟踪和预测。
雷达目标跟踪技术主要分为两类:点目标跟踪和航迹跟踪。
对于点目标跟踪,通常采用卡尔曼滤波器、扩展卡尔曼滤波器等滤波算法进行实时跟踪。
卡尔曼滤波器通过将目标位置和速度作为状态变量建立状态方程,并结合观测方程对目标进行预测和修正。
扩展卡尔曼滤波器则是对非线性系统进行近似线性化处理,将卡尔曼滤波器扩展到非线性系统上。
而航迹跟踪则是对目标的航迹进行预测和估计,常用的方法有最小二乘法、贝叶斯滤波法等。
在雷达信号处理中,还有一类重要的技术是目标特征提取。
目标特征提取是指从雷达回波信号中提取出与目标特征属性相关的信息。
常用的特征提取方法有时域特征、频域特征和小波变换等。
时域特征是指根据雷达回波信号的幅度、距离延迟、时间间隔等特征进行目标识别。
频域特征则是通过对雷达回波信号进行傅里叶变换,提取出目标的频谱特征。
小波变换则是将时域和频域结合起来,通过不同尺度波形进行目标特征提取。
目标检测与跟踪技术的研究在军事和民用领域有着广泛应用。
在军事领域,雷达目标检测与跟踪技术能够实现对目标的远程监视和侦察,为军事行动提供重要支持。
在民用领域,雷达目标检测与跟踪技术应用于航空交通管制、地震监测和气象预警等方面,对于保障公共安全和提高生活质量具有重要意义。

激光扫描雷达的工作原理与使用注意事项激光扫描雷达是一种高精度、高分辨率的测距设备,广泛应用于无人驾驶、机器人导航、环境感知等领域。
它利用激光束的特性进行扫描,通过测量激光束的往返时间和角度来确定物体的距离和位置。
本文将介绍激光扫描雷达的工作原理,并提供使用激光扫描雷达时需要注意的事项。
一、工作原理激光扫描雷达的工作原理可以简单地分为三个步骤:发射激光束、接收回波信号、计算距离和位置。
首先,激光扫描雷达会通过发射器产生一束激光束,并利用伺服系统实现扫描。
这些激光束发射到周围环境中,并被物体表面反射回来。
接下来,激光扫描雷达会接收回波信号,并记录下激光束离开和回到雷达的时间差,即往返时间。
由于激光的速度是已知的,可以利用往返时间来计算距离。
最后,激光扫描雷达通过扫描的角度和已知位置来确定物体在空间中的位置。
通过不断扫描并记录激光束的位置和距离,可以获取到物体的精确位置信息。
二、使用注意事项使用激光扫描雷达时需要注意以下几个方面:1.安全性激光扫描雷达使用激光束进行扫描,因此在使用过程中需要注意安全问题。
激光束对人眼有一定的伤害,因此在实验室或使用场景中应该避免激光直接照射到人眼。
同时,也需要注意周围环境的安全,防止激光束对其他物体造成损害。
2.环境适应性激光扫描雷达对环境的适应性是一个重要的考虑因素。
不同类型的激光雷达在不同环境下的性能可能会有所不同,因此在选择激光扫描雷达时需要考虑使用场景的特点,并选择适合的型号。
3.抗干扰能力在实际应用中,激光扫描雷达可能会受到一些干扰,如其他光源的影响、物体表面的反射性等。
因此,在使用激光扫描雷达时,需要保证信号的准确性和稳定性,尽量消除或降低干扰源对测量结果的影响。
4.数据处理激光扫描雷达在工作过程中会产生大量的数据,因此需要进行有效的数据处理。
数据处理包括数据的采集、存储和分析等步骤,需要根据具体应用场景选择合适的数据处理方法和算法。
5.校准和维护激光扫描雷达在使用之前需要进行校准,以保证测量结果的准确性。
激光雷达目标识别技术激光雷达是一种使用激光束测量和捕捉周围环境的传感器。
它能够提供高精度、高分辨率的三维空间信息,被广泛应用于自动驾驶、机器人导航、工业测绘等领域。
在这些应用中,激光雷达的目标识别技术起着至关重要的作用。
激光雷达目标识别技术的核心是根据激光束与目标物体之间的交互作用,提取目标物体的特征信息,并将其与已知的目标特征进行比对和匹配,从而实现目标的识别和分类。
首先,激光雷达通过发射激光束并感知回波信号来获取周围环境的点云数据。
然后,通过对点云数据进行处理和分析,提取出目标物体的特征信息。
常见的目标特征包括目标的形状、尺寸、高度、位置等。
在目标特征提取的过程中,常用的算法包括点云分割、特征提取和特征描述。
点云分割算法通过将点云数据分割成多个区域,将目标物体从周围的背景中分离出来。
特征提取算法利用目标物体的局部特征,如曲率、法线方向等,来描述目标的形状和表面特征。
特征描述算法将提取到的特征进行编码和压缩,以便于后续的识别和分类。
目标识别是激光雷达应用中的关键问题之一。
根据目标的不同特征,可以将目标分为点云目标和物体目标两类。
点云目标是指具有明显表面特征的目标,如建筑物、道路、树木等;物体目标是指具有立体结构和形状的目标,如车辆、行人、动物等。
针对点云目标的识别,常用的方法是基于图像处理的技术。
首先,将点云数据转化成二维图像,然后利用图像处理的算法和技术进行目标的检测、分割和分类。
这种方法能够利用图像处理的成熟技术和算法,有效地提取目标的表面特征,但对于复杂的场景和目标物体,识别的准确度和鲁棒性有一定的局限性。
针对物体目标的识别,常用的方法是基于点云的几何特征和形状特征。
对于车辆目标的识别,可以利用车辆的几何特征,如车身的形状、尺寸和旋转角度等进行识别和分类。
对于行人目标的识别,可以利用行人的立体结构和运动特征进行识别和分类。
这种方法在目标的几何特征和形状特征的提取上更具优势,能够实现高精度的目标识别和分类。
机器人激光雷达原理机器人激光雷达原理激光雷达是一种利用激光束测量目标距离和位置的传感器,广泛应用于机器人导航、环境感知和避障等领域。
它通过发射激光束并接收反射回来的光信号,从而实现对目标的探测和测量。
激光雷达的原理主要包括发射、接收和信号处理三个部分。
发射部分:激光雷达通过激光发射器产生一束高能激光束,这个激光束会沿着一个特定的角度范围内扫描。
激光的发射角度和扫描方式可以根据具体应用的需求进行调整。
接收部分:激光雷达的接收器用于接收被测物体反射回来的激光信号。
接收器通常由一个高灵敏度的光电二极管或光电倍增管组成,能够将接收到的光信号转换为电信号。
信号处理部分:激光雷达的信号处理部分主要负责对接收到的激光信号进行处理和分析。
首先,它会测量激光束从发射到接收所经过的时间,根据光速和时间差计算出目标距离。
其次,通过分析接收到的激光强度和回波信号的特征,可以确定目标的位置、形状和运动状态。
激光雷达的工作原理基于时间差测量和三角测量原理。
在时间差测量中,激光雷达通过测量激光束从发射到接收所经过的时间差,计算出目标的距离。
在三角测量中,激光雷达通过根据接收到的激光束的入射角度和反射角度,计算出目标的位置。
激光雷达的精度和性能取决于多个因素,包括激光束的功率、发射和接收器的性能、环境的干扰等。
为了提高激光雷达的测量精度和可靠性,现代激光雷达通常采用多波束和多线束扫描技术,同时结合高速信号处理和数据融合算法,以获得更准确和稳定的测量结果。
机器人激光雷达的应用非常广泛。
在机器人导航中,激光雷达可以用于地图构建、定位和路径规划,帮助机器人实现自主导航和避障。
在环境感知中,激光雷达可以用于检测和识别障碍物、人体和其他目标,提供环境信息以供机器人做出决策。
在工业自动化中,激光雷达可以用于测量和检测物体的尺寸、形状和位置,实现自动化生产和质量控制。
总结起来,机器人激光雷达通过发射激光束、接收反射信号并进行信号处理,实现对目标的距离和位置的测量。
1.3.3激光雷达的基本原理激光雷达最基本的工作原理与普通雷达类似,即由发射系统发送一个信号,与目标作 用产生的返回信号被接收系统收集并处理,以获得所需信息。
不同的是激光雷达的发射信 号为激光束,与普通无线电雷达发送的毫米波相比,波长要短得多。
无线电雷达由于波长 长,无法探测小型或微粒型目标,而用于激光雷达系统的激光波长一般在微米量级,因而 能用于探测极细小的微粒和分子。
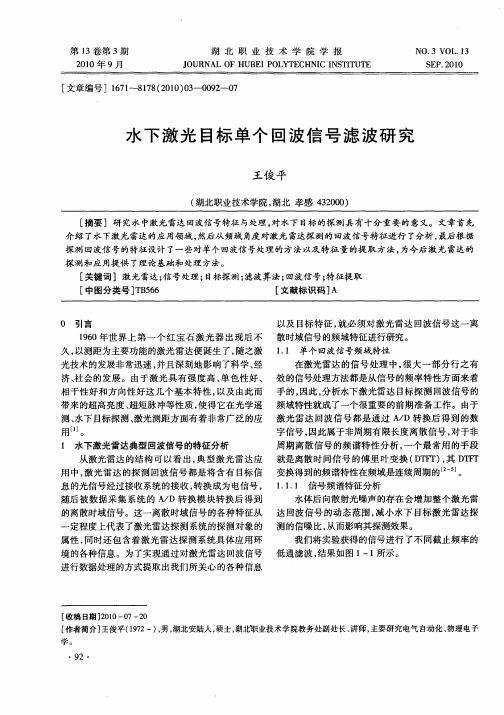
图1-3激光雷达原理 Figl-3 Principle of lidar激光雷达的基本原理如图1-3所示,由激光器发出一束波长为λ0,宽度为t P 的脉冲,经准直扩束后垂直射入大气,光脉冲在通过大气时受到散射和衰减,其后向散射光被接收面积为Ar 的望远镜系统接收,高度z 处的后向散射信号功率可用雷达方程表示[36]:()()()()z T z zAr2t c z Y P z P 22p 0,,,λλβλ⋅⋅⋅⋅⋅⋅= (1.1) 式中,λ为接收到的散射信号的波长,P 0为发射的激光脉冲的峰值功率,Y(z)为发送 器与接收器光路的几何重叠系数,c 为光速,()z ,λβ为大气体积后向散射系数,()z T ,λ 为大气的透过率,由朗伯定律可知:()()⎥⎦⎤⎢⎣⎡=⎰’’’,,z 0dz z -exp z T λαλ (1.2)式中,()z ,λα为大气的消光系数。
从理论上,()z ,λβ为大气数密度N (z)与散射截面Ωd d σ的乘积,即 ()()Ω⋅=d d z N σλβz , (1.3) 如前所述,大气中与激光雷达脉冲相互作用产生的后向散射信号成分包括了大气气体分子和气溶胶粒子,由于分子尺寸小,所产生的散射光相对较弱,瑞利散射截面与激发波长的四次方成反比,大气气溶胶粒子对激光的散射光为米散射。
对某一激光雷达的特定波长,分子散射直接随着大气分子的浓度而发生变化,但气溶胶散射却很复杂,取决于粒径分布以及气溶胶粒子的折射率。
这些气溶胶粒子随地域、时间变化明显,所以无法对其准确估算与预测。
激光雷达回波信号及处理方法分析
摘要:本文研究的主要内容是用数字信号处理的方法来处理和分析用于大气探测的激光雷达的信号。
激光雷达的回波信号有很多种,例如:大气扰动噪声、电噪声以及背景噪声等,本文就是通过对这些大气探测的激光信号进行分析研究,并提出了一定的降噪方案,用来在一定程度上抑制部分噪声。
利用距离校正的方法来获得探测距离。
消除物理噪声采用的是mti的方法。
设计合适的滤波器,选择适当的截止频率,从而去除接收系统的各器件导致的高频的电噪声。
关键词:激光雷达;回波信号;处理
中图分类号:tn958.98 文献标识码:a 文章编号:1674-7712 (2013) 08-0000-01
随着雷达技术的不断提升,用于提供气象服务的雷达激光系统需要在可靠性、灵活性以及稳定性等方面做大幅度的提升。
为了满足气象服务的需求,激光雷达系统的时效性、精确性以及监测范围等都需要提出更严格的规范和要求。
因此,需要根据测风激光雷达的工作原理和工作特征,并且结合气象服务对于激光雷达系统的需求,比拟多普勒微波天气雷达系统的运行模式,对比传统激光雷达的测量手段,进一步制定用于气象服务的测风雷达系统的运行规范。
一、回波信号
测风激光雷达系统包括四部分:发射激光部分、接受信号部分、
采集处理信号部分。
信号由接受系统接受,再经过信号处理系统进行控制处理,最后转变为我们需要的确切的风场信息。
多普勒激光雷达系统接收到的是成指数衰减的回波信号。
距离越大,相应的噪声越大,接收到的信号能量越小[1]。
二、噪声
(一)背景噪声
激光雷达系统中由激光导致的噪声以及自然噪声都属于背景噪声。
自然噪声大部分是由月光、太阳光等造成的噪声。
当激光雷达系统工作在白天时,地面以及天空散射太阳光所导致的噪声是其主要作用的背景噪声。
在天空晴朗的情况下,由太阳光辐射所导致的散射分配到单位面积,相应的单位波长的功率密度的峰值(可见光区域)高达10-5wcm-2nm-1s-1,由大气中的二氧化碳以及水蒸气等吸收红外辐射所导致的很多凹陷大部分出现在0.7um以后的波长区域,在小于0.3um的区域内急剧下降主要是由于紫外辐射被地表上空的臭氧层大量吸收所导致的。
(二)干扰散射
当激光作用于物质时,在导致多种类型散射的同时,也能够导致荧光的产生,很多激光雷达系统是以荧光信号为主的,这样相互作用产生的散射就成为了噪声,另一方面,很多激光雷达基础是散射信号,那就可能被荧光信号所干扰。
激光后向散射能够限制raman 激光散射雷达以及荧光激光雷达的探测灵敏度。
这主要是由两方面
决定的:一是,雷达设计存在缺陷,激光近场波长的后向散射可能在谱分析之前由元器件产生荧光,以及导致探测器进入饱和状态。
二是,选择发射谱不合理,有用信号和后向反射一起传送到探测系统[2]。
三、噪声处理
(一)校正距离
激光雷达系统的探测距离是通过对数据信息进行平方校正得到的,这样就能够将有用信号从接收到的信号中筛选出来。
(二)mti方法
mti能够在严峻的电磁环境中处理抗干扰信号。
回波信号中背景噪声的消除就是采用的mti的方法。
也可以通过暗计数即直接去除信号中的背景噪声的方法来消除背景噪声。
(三)平均信号
激光雷达系统在实际工作过程中都要检测多个脉冲,然后将多个脉冲进行合并平均,这样就可以有效提高雷达系统的信噪比、灵敏度和准确度。
利用相参累积的方法处理n个等幅的脉冲信号,信噪比能够提高n倍。
这是由于同向相加的信号是处于相邻周期的,并且是严格同向关系的中频信号,所以相加之后电压变为原来的n倍,功率也就变为原来的n2倍。
各脉冲噪声都是独立的、随机的,因此平均功率相加后噪声总功率变为原来的n倍,所以相参积累能够使信噪比得到n倍改善。
多普勒脉冲激光雷达系统就采用的是相参积累。
当回波信号的样本数据量较大时,受环境因素的影响,大数据量的平均能够导致大误差的发生。
这时可以采用滑动平均以及部分平均的方法进行处理。
滑动平均是用新数据替换老数据,以滑动窗口的方式对数据串进行处理。
部分平均是将数据平均分组,然后进行平均。
用滑动平均和部分平均的方式处理大数据量的回波信号,可以得到信号中重要参数的变化状况。
(四)中值滤波
standard median filter简称sm,中值滤波算法的关键是快速排序。
主要流程是:在所有需排序的元素中随机选择任意元素,以这一元素为基准,将其他元素和其对比,如果比基准元素小,就放在基准元素前面,如果比基准元素大就放在基准元素后面。
一轮排序完成后,按基准元素位置将整个元素集合分界成两部分。
然后重复上一个对比排序过程,直到每部分只有一个元素为止。
最后选取中间位置的元素值作为输出数据[2]。
中值滤波属于排序滤波器的一种,主要是寻找滤波子窗经过排序后的像素的中间值。
由此可见,中值滤波没有必要对所有的数据进行排序,只要能够快速找出中间值就可以。
为了以更快的速度找出中间值,可以采用mean-based fast median filter简称mfm,均值加速的方法进行中值滤波。
mfm的基本流程:首先将滤波子窗的所有元素进行求平均值的计算,将大于等于这个平均值的元素归为一个集合,将小于平均值的元素归为另一集合,对比两个集合中的元素数量,将元素少的集合
舍弃,对于元素数量大的集合再次重复以上操作。
当分解出的两个集合均比原始集合元素的总量的一半少时停止。
最后对分解后的其中一个集合进行快速排序得到中间值。
四、小结
激光雷达的回波信号有很多种,例如:大气扰动噪声、电噪声以及背景噪声等,通过对这些大气探测的激光信号进行分析研究,并提出了一定的降噪方案,用来在一定程度上抑制部分噪声。
利用距离校正的方法来获得探测距离。
消除物理噪声采用的是mti的方法。
设计合适的滤波器,选择适当的截止频率,从而去除接收系统的各器件导致的高频的电噪声。
在实际工作中要综合运用各种方法,从而提高激光雷达系统的可靠性、稳定性以及准确性。
参考文献:
[1]刘智深,宋小全,刘金涛,张凯临.非相干脉冲激光多普勒雷达测速技术[j].科学通报,2001,46(24):2080-2085.
[2]j.g.hawley,r.targ,et al.,coherent launch-site atmospheric wind sounder:theory and experiment,appl.opt.,1993,32:4557.。