安川伺服参数设定说明
- 格式:doc
- 大小:71.50 KB
- 文档页数:3

当安川伺服系统使用绝对编码器时,以下场合就要重新设置原点:
1、当第一次安装电机或驱动器;
2、当出现编码器报警,如A81,A82报警;
3、当关电的时候拆过编码器电缆。
使用面板进行设定的操作方法如下:
1. 按下MODE/SET 键,选择辅助功能执行模式。
2. 按下UP 键或者DOWN 键,选择用户常数Fn008。
3. 请持续按下DATA/SHIFT 键1 秒钟以上显示变为如下。
4. 按下UP 键后,显示发生如下变化。
请持续按下UP 键,直到显示出“PGCL5”。
如果在中途发生键操作错误,则“nO_OP”闪烁1 秒钟,然后返回辅助功能执行模
式的显示。
再次返回上述的3 的步骤,重新操作。
5. 显示“PGCL5”后,请按下MODE/SET 键。
显示发生如下的变化,执行绝对值编码器的多匝数据的清除动作。
6. 请持续按下DATA/SHIFT 键1 秒钟以上。
返回辅助功能执行模式。
至此,绝对值编码器的设定操作结束。
在OFF 电源之后,重新ON 电源。
Pn002.2的设定内容
0将绝对值编码器作为绝对值编码器使用
1将绝对值编码器作为增量式编码器使用
Pn002.2即参数Pn002从右数往左的第三位,变更该参数后驱动器要重启动才生效。

安川伺服器使用手册安川伺服器使用手册1:简介1.1 产品概述1.2 适用范围2:系统要求2.1 硬件要求2.2 软件要求3:安装步骤3.1 安川伺服器软件3.2 安装安川伺服器软件3.3 配置安川伺服器4:配置文件说明4.1 主配置文件4.2 网络配置文件4.3 数据库配置文件5:用户管理5.1 创建用户5.2 删除用户5.3 用户权限设置6:资源管理6.1 添加资源6.2 删除资源6.3 配置资源7:任务管理7.1 创建任务7.2 删除任务7.3 监视任务进度8:日志管理8.1 查看日志8.2 清理日志附件:1:安川伺服器软件2:示例配置文件注释:1:安川伺服器:指安川伺服器软件,一款用于管理和控制和自动化设备的软件。
2:主配置文件:安川伺服器的主要配置文件,包含系统设置和各个模块的配置信息。
3:网络配置文件:用于配置安川伺服器的网络连接参数,如IP地址和端口号等。
4:数据库配置文件:用于配置安川伺服器的数据库连接参数,如数据库类型和用户名密码等。
5:用户权限设置:用于设置不同用户的权限级别和对不同资源的访问控制。
本文档涉及附件:1:安川伺服器软件2:示例配置文件本文所涉及的法律名词及注释:1::根据预先编程的指令或自主学习,在工业制造、医疗、农业等领域中执行各种任务的可编程多功能机械设备。
2:自动化设备:能代替人手完成某种工作的装置或设备,具有自动控制、自动调节、自动组织和自动测试等功能。

安川伺服使用手册珊华电子科技(上海)有限公司 2011年3月目 录第一章 安川伺服简介1.1产品的确认1.2产品的型号第二章 安川伺服接插件2.1 S-II系列(3kw、15kw)2.2 S-V系列 (400w、750w)第三章 安川伺服调试3.1 主要的参数3.2 两主轴同步性第四章 安川伺服常见报警处理4.1 常见的报警4.2 处理方法第五章 安川伺服的安装5.1 伺服电机安装事项5.2 伺服驱动器安装事项第一章 安川伺服简介1.1 产品的确认1.1.1 产品的确认事项产品到货后,请就以下项目进行确认。
在以上各项的确认中, 如发现有不妥之处, 请及时与所购地的销售店或本公司的销售处联系。
1.1.2 伺服电机的铭牌确认项目备注到货产品是否与您订购的产品型号相符? 请通过伺服电机、SERVOPACK( 伺服单元) 的铭牌的“型号”栏进行确认( 请参照下一项以后的说明)。
伺服电机的旋转轴是否运行顺利? 能用手轻轻转动则属正常。
但是“带制动器的电机”则不转动。
是否有损坏的地方? 请查看整个外表,检查是否有因运输等引起的损伤。
其中生产编号中的第三、四位是年份,第五位是月份。
例如:DD 996 456789001299年 6月(其它英文字母代表:X-10月份、Y-11月份、Z-12月份)1.2 产品的型号1.2.1 S-II系列伺服电机:伺服驱动器:1.2.2 S-V系列伺服电机:伺服驱动器:第二章 安川伺服接插件2.1 S-II系列(3kw、15kw)3KW伺服电机型号:SGMGH-30ACA61电机侧编码器接插件:L形插头 MS3108B20-29S电缆夹 MS3057-12A电机侧动力接插件:L形插头 MS3108B22-22S电缆夹 MS3057-12A驱动器型号:SGDM-30ADA驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**15KW伺服电机型号:SGMGH-1EACA61电机侧编码器接插件:L形插头 MS3108B20-29S电缆夹 MS3057-12A电机侧动力接插件:L形插头 MS3108B32-17S电缆夹 MS3057-20A驱动器型号:SGDM-1EADA驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**2.2 S-V系列 (400w、750w)400W 伺服电机型号:SGMJV-04AAA61电机侧编码器接插件:插头54346-0070****插针56161-8081****电机侧动力接插件:J27-06FMH-7KL-1M-CF**(套件:包含插头、插针) 插头插针驱动器型号:SGDV-2R8A01A驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**750W 伺服电机型号:SGMJV-08AAA61电机侧编码器接插件:插头54346-0070****插针56161-8081****电机侧动力接插件:J37-06FMH-7KL-1M-CF**(套件:包含插头、插针) 插头插针驱动器型号:SGDV-5R5A01A驱动器侧(CN2)编码器接插件:55100-0670**驱动器侧(CN1)50芯I/O接插件:连接器 10150-3000PE**壳体 10350-52A0-008**第三章 安川伺服调试3.1 主要的参数1)PN000 控制模式选择最主要是第1位(速度、位置控制方式的选择)2)PN100 速度环增益在速度控制,增加设定值可以提高响应性3)PN101 速度环积分时间参数降低设定值可以提高响应性4)PN102 位置环增益在位置控制,增加设定值可以提高响应性5)PN103 转动惯量比最好能设定为与机械惯量实际越接近越好6)PN110 在线自动调谐类开关如果负载基本不变的话,需要把第0位,改成2-不调谐。

安川伺服电机参数基本调整安川伺服电机是一种常见的电机控制设备,广泛应用于机械设备中。
在使用过程中,需要根据具体的应用需求对伺服电机的参数进行基本调整,以实现更好的运动性能和控制效果。
下面将介绍一些常见的安川伺服电机参数基本调整方法。
1.转矩限制参数调整:转矩限制参数是指电机在运行中所能输出的最大转矩。
根据实际需求,可以适当调整转矩限制参数,以达到所需的运动效果。
一般来说,如果转矩限制设置得过大,容易导致电机过载;而设置得过小,则可能无法满足实际应用需求。
因此,在进行参数调整时,需要根据具体应用场景进行合理设置。
2.速度限制参数调整:速度限制参数是指电机在运行中所能达到的最大速度。
在使用伺服电机时,常常需要对其运动速度进行控制,以满足实际需求。
通过调整速度限制参数,可以控制电机的最大速度。
一般来说,速度限制设置得过大,可能会导致电机运行不稳定;设置得过小,则无法满足实际要求。
因此,在进行参数调整时,需要综合考虑电机的性能和实际需求。
3.比例增益参数调整:比例增益是伺服电机控制中的重要参数,用于控制电机响应速度和稳定性。
在进行比例增益参数调整时,需要注意以下几点:首先,增益设置得太小,可能会导致电机响应迟钝;设置得太大,则容易导致电机振荡或不稳定。
其次,在调整时应尽量使电机响应速度和运动稳定性达到一个合理的平衡。
最后,比例增益参数一般需要根据具体应用需求进行调整。
4.调整滤波时间常数参数:滤波时间常数参数是伺服电机控制中的一个重要参数,用于抑制电机输出信号的高频噪声。
在进行滤波时间常数参数调整时,需要注意以下几点:首先,滤波时间常数设置得过小,可能会导致电机输出信号的噪声没有得到有效抑制;设置得过大,则会影响电机的运行性能。
其次,应根据具体应用需求进行合理调整,以满足实际要求。
5.调整位置环参数:位置环是伺服电机控制中的一个重要环节,用于实现位置的准确控制。
在进行位置环参数调整时,需要注意以下几点:首先,位置环控制的稳定性对电机性能影响较大,因此在设置参数时应尽量提高稳定性。
安川伺服参数设定安川伺服里面有很多个参数但是其中只有几个参数需要调:Pn100 Pn101 Pn102 Pn103 Pn401 Pn110 Pn000 Pn200 Pn201 Pn202 Pn203 Pn50A 其中Pn100 Pn101 Pn102受到Fn001刚性的控制,一般情况下刚性调到5那么速度增益,位置增益,积分时间就自动调好了.将Pn110调到0运动机器那么Fn007里面就会出现机器的惯量把惯量放到Pn103里就可以了Pn200=n.0004Pn201=2500Pn202=32768Pn203=2500Pn50A=n,8100Fn001为机械刚性Pn100为速度增益Pn101为速度积分时间Pn102为位置增益Pn401为扭矩滤波器时间,当Fn001动了之后Pn100 Pn101 Pn102就会一起动Pn110为自动调谐,调谐的是Pn103积分比,驱动器会将积分比储存到Fn007中Pn200为指令脉冲形态Pn201为PG分频比设定Pn202为电子齿轮比分子Pn203为电子齿轮比分母Pn50A为输入信号选择1安川伺服驱动器和凯恩帝数控系统相配时只需设定以下参数(见参数表);其余参数一般情况下不用修改。
Pn000 功能选择n.0010(设定值)第0位:设定电机旋转方向;设”1”改变电机旋转反向。
第1位:设定控制方式为:“1”位置控制方式。
Pn200 指令脉冲输入方式功能选择n.0101(设定值)“1”正反双路脉冲指令(正逻辑电平)(设定从控制器送给驱动器的指令脉冲的类型)Pn202 电子齿轮比(分子)Pn203 电子齿轮比(分母)根据不同螺距的丝杆与带轮比计算确定,计算方法如下:Pn202/Pn203=编码器条纹数(32768)X4 / 丝杠螺距×带轮比×1000 参数设置范围:1/100≤分子/分母≤100注:1. KND 系统内的电子齿轮比需设置为:CMR/CMD=1:1 (确保0.001 的分辨率);2. 如果是数控车床,X 轴用直径编程,则以上计算公式中,分母还应乘以2,即:丝杠螺距×带轮比×1000×2。
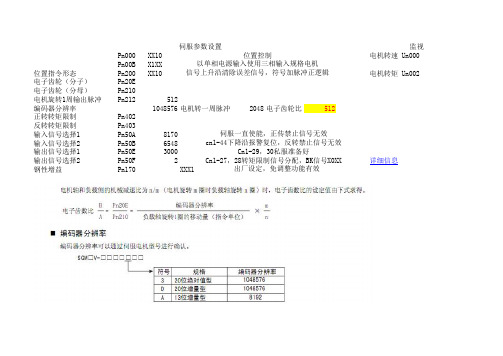
Pn000XX10电机转速Un000Pn00B X1XX 位置指令形态Pn200XX10电机转矩Un002电子齿轮(分子)Pn20E 电子齿轮(分母)Pn210电机旋转1周输出脉冲Pn212512编码器分辨率1048576电机转一周脉冲2048电子齿轮比
512正转转矩限制Pn402反转转矩限制Pn403输入信号选择1Pn50A 8170输入信号选择2Pn50B 6548输出信号选择1Pn50E 3000输出信号选择2Pn50F
2钢性增益Pn170XXX1位置控制出厂设定,免调整功能有效Cn1-29,30私服准备好Cn1-27,28转矩限制信号分配,BK信号X0XX 伺服参数设置
详细信息
监视伺服一直使能,正传禁止信号无效cn1-44下降沿报警复位,反转禁止信号无效信号上升沿清除误差信号,符号加脉冲正逻辑以单相电源输入使用三相输入规格电机。
安川伺服参数操作器操作方法
安川伺服参数是安川伺服驱动器的设定参数,可以通过操作器进行参数的修改。
下面是安川伺服参数操作器的操作方法:
1. 打开操作器:将操作器插入伺服驱动器的操作器接口,然后打开操作器的电源开关。
2. 进入参数修改模式:按下操作器上的"MODE"按钮,进入参数修改模式。
3. 选择要修改的参数:使用操作器上的"UP"和"DOWN"按钮选择要修改的参数项。
4. 修改参数值:按下操作器上的"RIGHT"按钮,将光标移到参数值的位置,然后使用操作器上的"UP"和"DOWN"按钮进行数值的修改。
5. 确认修改:按下操作器上的"ENTER"按钮,确认修改。
6. 保存参数:在完成所有参数的修改后,按下操作器上的"MODE"按钮退出参数修改模式,然后按下操作器上的"ENTER"按钮,保存修改后的参数。
需要注意的是,在修改安川伺服参数之前,建议先备份原始参数,以免修改错误造成设备损坏。
另外,参数的修改需要根据具体的设备情况和应用需求进行,建
议在有相关经验或指导的情况下进行操作。