第12章 常见间歇机构
- 格式:ppt
- 大小:647.00 KB
- 文档页数:13
4种常见的间歇运动机构4种常见的间歇运动机构凸轮分割器棘轮机构槽轮机构凸轮式间歇运动机构不完全齿轮机构在各类机械中,常需要某些构件实现周期性的运动和停歇。
能够将主动件的连续运动转换成从动件有规律的运动和停歇的机构称为间歇运动机构。
⽽实现间歇运动的四种常⽤机构分别为:棘轮机构、槽轮机构、凸轮式间歇运动机构和不完全齿轮机构。
⼀、棘轮机构棘轮机构的类型很多,从⼯作原理上可分为轮齿啮合式和摩擦式棘轮机构;从结构上可分为外啮合式和内啮合式棘轮机构;从传动⽅向上分为单向(单动和双动)式和双向式棘轮机构。
棘轮机构是把摇杆的摆动转变为棘轮的间歇回转运动。
其优点轮齿式棘轮机构运动可靠,棘轮转⾓容易实现有级调节,但在⼯作过程中棘⽖在齿⾯上滑⾏,齿尖易磨损并伴有噪⾳,同时为使棘⽖能顺利落⼊棘轮槽,摇杆摆⾓应略⼤于棘轮转⾓,这样就不可避免地存在空程和冲击,在⾼速时尤其严重,所以常⽤在低速、轻载下实现间歇运动。
摩擦式棘轮机构传递运动平稳、⽆噪声,棘轮转⾓可作⽆级调节。
但由于运动准确性差,不宜⽤于运动精度要求⾼的场合。
在⼯程实践中,棘轮机构常⽤于实现间歇送进(如⽜头刨床)、⽌动(如起重和牵引设备中)和超越如钻床中以滚⼦楔块式棘轮机构作为传动中的超越离合器,实现⾃动进给和快速进给功能)等场合。
⼆、槽轮机构槽轮机构⼜称马尔他机构或⽇内⽡机构,也是常⽤的间歇运动机构之⼀。
普通平⾯槽轮机构有外接式槽轮机构(图3)和内接槽轮机构(图4)两种类型。
它主要是由带有均布的径向开⼝槽的槽轮2、带有圆柱销A的拔盘1以及机架组成。
槽轮机构的⼯作过程是:主动拨盘1上的圆柱销A进⼊槽轮2上的径向槽以前,拔盘上的凸锁⽌弧α将槽轮上的凹锁⽌弧β锁住,则槽轮静⽌不动。
当拔盘圆柱销A进⼊槽轮径向槽时,凸、凹锁⽌弧刚好分离,圆柱销可以驱动槽轮转动。
当圆柱销脱离径向槽时,凸锁⽌弧⼜将凹锁⽌弧锁住,从⽽使槽轮静⽌不动。
因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。
其他常用机构
超越离合
α
3.棘轮的动程和动、停时间比的调整
图示棘轮机构,摇杆1作
等速往复摆动,棘轮动、
停时间比为1,此时棘轮
转过3个齿(情况1)
如何改变棘轮的动程
和动、停时间比?
实际应用中棘轮机构必须与其他机构联用,以
L
拨盘槽轮
内啮合球面槽轮
2、按槽数分:
3、
4、6、8
3、按销数分:单销、多销
4、特殊形式的槽轮机构
多销多槽槽轮机构单销4槽槽轮机构
三、应用
转速不高和要求间歇转动的机械当中,如自动机械、轻工机械或仪器仪表等。
电影放映机
分别对时间求一阶导数、和二阶导数,得:
k α= α2 / ω21
z=4
§12-3 不完全齿轮机构
二、类型
外啮合式内啮合式齿轮齿条三、工作特点
优点:结构简单、制造容易、工作可靠、从动轮运动时间和静止时间的比例可在较大范围内变化。
缺点:有刚性冲击,一般只用于低速、轻载场合。
快速连接装置
螺旋机构的结构简单,制造方便,在仪器仪
三、滚珠螺旋
螺杆1和螺母2之间增加滚动
体3(一般均为滚珠)。
这样
使螺杆和螺母不直接接触,
而且将原来接触表面间的滑
动摩擦变为滚动摩擦。
为滚珠连续不断滚动,滚
道分成工作滚道和返回滚
道两部分,且连接成一个
闭合循环回路。
摩擦小、传动效率高、起动力矩小、传动灵活、平稳、寿命长应用于机床、航空航天、汽车等领域
(万向联轴节)
轴3角速度变化的范围为:
(1)
(单万向联轴节成对使用)
§12-6 凸轮式间歇机构。
第十二章其他常用机构一、选择题:1、用单万向节传递两相交轴之间的运动时,其传动比为变化值;若用双万向节时,其传动比C。
(A) 是变化值;(B) 一定是定值;(C) 在一定条件下才是定值2、在单向间歇运动机构中, A 的间歇回转角在较大的范围内可以调节。
(A)槽轮机构(B) 棘轮机构(C)不完全齿轮机构(D) 蜗杆凸轮式间歇运动机构3、在单向间歇运动机构中, C 可以获得不同转向的间歇运动。
(A)不完全齿轮机构(B) 圆柱凸轮间歇运动机构(C)棘轮机构(D) 槽轮机构4、家用自行车中的“飞轮”是一种超越离合器,是一种 C 。
(A)凸轮机构(B) 擒纵轮机构(C)棘轮机构(D) 槽轮机构二、填空题:1、棘轮机构是由摇杆、棘爪、棘轮、止动爪组成,可实现运动,适用于低速轻载的场合。
其棘轮转角大小的调节方法是:改变主动摇杆摆角的大小、加装一棘轮罩以遮盖部分棘齿。
2、槽轮机构是由主动拨盘、从动槽轮、机架组成,优点是:结构简单、外形尺寸小、机械效率高,能较平稳、间歇地进行转位,缺点是:存在柔性冲击,适用于速度不太高的场合。
3、擒纵轮机构由擒纵轮、擒纵叉、游丝摆轮及机架组成。
4、擒纵轮机构优点是结构简单,便于制造,价格低廉,缺点是振动周期不很稳定,故主要用于计时精度要求不高、工作时间较短的场合。
5、凸轮式间歇运动机构由主动轮和从动盘组成,主动凸轮作连续转动,通过其凸轮廓线推动从动盘作预期的间歇分度运动。
优点是:动载荷小,无刚性和柔性冲击,适合高速运转,无需定位装置,定位精度高,结构紧凑,缺点是:加工成本高,装配与调整的要求严格。
6、不完全齿轮机构由一个或一部分齿的主动轮与按动停时间要求而作出的从动轮相啮合,使从动轮作间歇回转运动。
工作特点是:结构简单,制造容易,工作可靠,动停时间比可在较大范围内变化,但在从动轮的运动始末有刚性冲击,适合于低速、轻载的场合。
7、螺旋机构是由螺杆、螺母和机架组成,通常它是将旋转运动转换为直线运动。
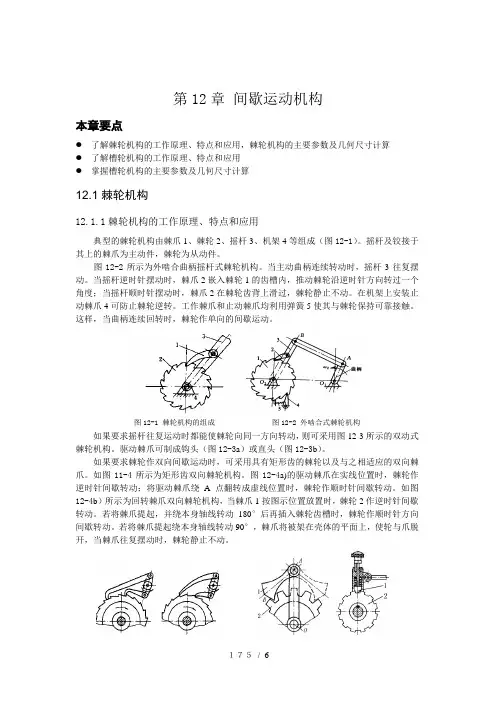
第12章间歇运动机构本章要点●了解棘轮机构的工作原理、特点和应用,棘轮机构的主要参数及几何尺寸计算●了解槽轮机构的工作原理、特点和应用●掌握槽轮机构的主要参数及几何尺寸计算12.1棘轮机构12.1.1棘轮机构的工作原理、特点和应用典型的棘轮机构由棘爪1、棘轮2、摇杆3、机架4等组成(图12-1)。
摇杆及铰接于其上的棘爪为主动件,棘轮为从动件。
图12-2所示为外啮合曲柄摇杆式棘轮机构。
当主动曲柄连续转动时,摇杆3往复摆动。
当摇杆逆时针摆动时,棘爪2嵌入棘轮1的齿槽内,推动棘轮沿逆时针方向转过一个角度;当摇杆顺时针摆动时,棘爪2在棘轮齿背上滑过,棘轮静止不动。
在机架上安装止动棘爪4可防止棘轮逆转。
工作棘爪和止动棘爪均利用弹簧5使其与棘轮保持可靠接触。
这样,当曲柄连续回转时,棘轮作单向的间歇运动。
图12-1 棘轮机构的组成图12-2 外啮合式棘轮机构如果要求摇杆往复运动时都能使棘轮向同一方向转动,则可采用图12-3所示的双动式棘轮机构。
驱动棘爪可制成钩头(图12-3a)或直头(图12-3b)。
如果要求棘轮作双向间歇运动时,可采用具有矩形齿的棘轮以及与之相适应的双向棘爪。
如图11-4所示为矩形齿双向棘轮机构。
图12-4a)的驱动棘爪在实线位置时,棘轮作逆时针间歇转动;将驱动棘爪绕A点翻转成虚线位置时,棘轮作顺时针间歇转动。
如图12-4b)所示为回转棘爪双向棘轮机构,当棘爪1按图示位置放置时,棘轮2作逆时针间歇转动。
若将棘爪提起,并绕本身轴线转动180°后再插入棘轮齿槽时,棘轮作顺时针方向间歇转动。
若将棘爪提起绕本身轴线转动90°,棘爪将被架在壳体的平面上,使轮与爪脱开,当棘爪往复摆动时,棘轮静止不动。
175/ 6a) b) a) b)图12-3 双动式驱动棘爪图12-4 矩形齿双向棘轮机构除外啮合棘轮机构外,还有内啮合棘轮机构(如图12-5)和棘条机构等。
棘轮机构结构简单,但不能传递大的动力,而且传动平稳性较差,不适宜于高速传动。
间歇机构的常见类型
间歇机构是机械传动中常用的一种机构,其主要作用是实现周期性的运动或转换运动方向。
常见的间歇机构类型有以下几种:
1. 转盘式间歇机构:由转盘和几个定位销组成,其中转盘为运动部件,定位销为固定部件。
通过转盘的旋转和定位销的定位,实现间歇运动。
2. 摆杆式间歇机构:由两个摆杆和一个凸轮组成,其中一个摆杆为运动部件,另一个摆杆为固定部件,凸轮为传动部件。
通过凸轮的旋转和两个摆杆的连杆机构,实现间歇运动。
3. 凸轮式间歇机构:由凸轮和几个滑块组成,其中凸轮为传动部件,滑块为运动部件。
通过凸轮的旋转和滑块的连杆机构,实现间歇运动。
4. 轮齿式间歇机构:由齿轮和几个锁销组成,其中齿轮为运动部件,锁销为固定部件。
通过齿轮的旋转和锁销的定位,实现间歇运动。
以上是常见的间歇机构类型,每种类型都有其特点和适用范围,可以根据具体需要进行选择和设计。
- 1 -。
机械原理A间歇运动机构间歇运动机构是一种能将连续运动转换为间歇运动的机构。
在间歇运动机构中,驱动轴连续旋转,但输出轴仅在特定的间歇时间内工作。
一、机械原理A间歇运动机构的构成:1.柱齿轮机构:柱齿轮是实现间歇运动的核心部件。
它由凸轮和摇杆组成。
凸轮由驱动轴上的齿轮驱动,因此凸轮会不断旋转。
摇杆则以其中一种特定的方式固定在凸轮上,并且连接到推锥环机构上的推动杆。
当凸轮旋转时,柱齿轮就会变换角度并在不同的时间间隔内推动推动杆。
2.推锥环机构:推锥环机构位于柱齿轮机构下方,与柱齿轮机构相连。
它由推动杆和推锥环组成。
推动杆由柱齿轮的摇杆通过其中一种机械连接机构推动,而推锥环则通过推动杆的作用来控制输出轴的运动。
推动杆在柱齿轮的作用下来回运动,从而使得推锥环的位置不断变换。
推锥环的位置决定了输出轴的运动状态,当推锥环达到一些特定的位置时,输出轴会开始工作,否则输出轴会处于停止状态。
二、机械原理A间歇运动机构的工作原理:当驱动轴上的凸轮旋转时,柱齿轮会跟随凸轮的动作进行旋转,并改变柱齿轮的角度。
柱齿轮的角度变化会导致推动杆的位置发生变化,进而影响推锥环的位置。
当推锥环的位置达到一些特定位置时,它会开始推动输出轴进行工作。
输出轴的工作时间由推锥环的位置决定,一旦推锥环超过了工作时间,输出轴将停止。
在停止状态下,柱齿轮会继续旋转,直到再次推动推锥环,使输出轴再次开始工作。
三、机械原理A间歇运动机构的应用:机械原理A间歇运动机构广泛应用于各种需要间歇运动的机械设备中。
例如,在包装机械中,间歇运动机构常被用于控制产品的进给、封装和出料等动作;在自动化生产线上,间歇运动机构可以用来实现输送带的进给和停止等控制;在印刷设备中,间歇运动机构可以控制印刷板的进给和停止等操作。
总之,机械原理A间歇运动机构在许多工业领域中发挥着重要的作用。
总结:机械原理A间歇运动机构是一种能将连续运动转换为间歇运动的机构。
它由柱齿轮机构和推锥环机构组成,通过凸轮的旋转和推动杆的作用来控制输出轴的运动。
机械设计基础知到章节测试答案智慧树2023年最新通辽职业学院第一章测试1.我们把各部分之间具有确定的相对运动构件的组合称为()参考答案:机构2.下列各机器中,属于机构的是()参考答案:千斤顶3.机构与机器的总称是()参考答案:机械4.机构是用来传递运动和()的构件系统参考答案:传递力5.下列说法中正确的是()。
参考答案:机器是由机构组成的6.下列属于机器特征的是()参考答案:具有确定的功能;各部分之间具有确定的相对运动;人造的实物组合体7.下列属于机器和机构共同特征的是()参考答案:各部分之间具有确定的相对运动;人造的实物组合体8.根据工作类型或用途的不同,机器可分为哪几类?()参考答案:动力机器;信息机器;加工机器;运输机器9.机构是具有确定相对运动的构件的组合。
()参考答案:对10.零件是加工制造的单元体,是构件的组成部分。
()参考答案:对第二章测试1.两构件通过点或线接触而构成的运动副称为()。
参考答案:高副2.两构件通过面接触而构成的运动副称为()。
参考答案:低副3.下列不属于计算平面机构自由度时应注意的事项的是()。
参考答案:具有确定运动4.机构具有确定运动的条件是()。
参考答案:机构的自由度>0且自由度数=原动件数5.两个构件在多处构成移动副,各接触处相对移动方向()时存在虚约束。
参考答案:相同、相平行6.机构中常见的高副包括()参考答案:凸轮副;齿轮副7.高副是点或线的接触,所以承受载荷时单位面积上的压力较小。
()参考答案:错8.轴与滑动轴承组成高副。
()参考答案:错9.高副比低副的承载能力大。
()参考答案:错10.机构中只要有一个运动副是低副的机构就是低副机构。
()参考答案:错第三章测试1.曲柄滑块机构通过()可演化成偏心轮机构。
参考答案:改变运动副尺寸2.在曲柄摇杆机构中,若曲柄为等速转动的主动件,摇杆作()。
参考答案:往复变速摆动3.在下列机构中,有急回特性的机构是()。
参考答案:偏置曲柄滑块机构4.平面四杆机构压力角α与传动角γ的关系为()。