微纳悬臂梁力学传感器弯曲振动模式的光学测量
- 格式:doc
- 大小:12.39 KB
- 文档页数:2
振动的测量原理振动的测量原理是通过不同的传感器或仪器来检测、监测和量化物体的振动状态及其特性。
振动测量在许多领域中都非常重要,包括工程、机械、建筑、地震学等。
以下将详细介绍几种常用的振动测量原理。
1. 加速度传感器原理:加速度传感器是最常用的测量振动的传感器之一。
它的原理基于牛顿第二定律,即物体受到的力与它的质量和加速度成正比。
加速度传感器通过测量物体上的加速度来判断振动的强度和频率。
当物体振动时,加速度传感器会产生与加速度大小成正比的电压信号。
该信号经过放大和滤波后,可以通过数据采集系统记录和分析,获得振动的各种参数。
2. 速度传感器原理:速度传感器是用于测量振动速度的传感器。
它的原理基于牛顿第二定律和黑尔定律,它们表明物体的加速度与速度成正比。
速度传感器通过测量物体上的速度来判断振动的强度和频率。
通常,速度传感器会将振动转换为机械位移量,并将其转化为电压信号。
这个电压信号经过放大和滤波后,可以用于分析和记录振动的特性。
3. 位移传感器原理:位移传感器是用于测量物体振动位移的传感器。
它的原理根据物体振动时的位置变化来判断振动的幅度和频率。
常用的位移传感器有电感式传感器和光学传感器。
电感式位移传感器工作原理是利用物体振动时磁场的变化来测量位移量。
光学位移传感器的工作原理是通过测量物体上的光学位移量来判断振动的幅度和频率。
4. 压电传感器原理:压电传感器是一种测量振动的传感器,它利用压电效应将机械振动转化为电信号。
当物体受到振动时,压电材料产生电荷分离现象,产生电信号。
压电传感器具有高度灵敏度和宽频响特性,适用于高频振动的测量。
5. 光纤传感器原理:光纤传感器是一种基于光学原理的振动测量方法。
它利用光纤的特性来测量物体的振动。
常见的光纤传感器有光纤光栅传感器和光纤干涉仪。
光纤光栅传感器通过测量光纤上光栅的变化来判断振动的频率和强度。
光纤干涉仪则是通过测量干涉光束的相位差来判断振动。
以上是几种常见的振动测量原理,每种原理都有其适用的特定场景。
振动测量方法、标准及实际振动原因分析及解决方案目录1、振动测量方法 21.1 加速度传感器21.1.1工作原理31.1.2优缺点41.2 速度传感器41.2.1工作原理41.2.2速度传感器优缺点51.3 位移传感器51.3.1工作原理61.3.2优缺点72、振动测量标准 82.1 ISO 10816系列标准82.2ASME标准82.3 DIN标准83、结论 84钢平台振动原因分析及解决方案84.1钢平台振动因素可包括一下几点:81、振动测量方法1.1 加速度传感器压电加速度传感器主要应用的是压电效应,压电效应是最流行的形式。
主要使用加速力而受到的微观晶体结构,压力会在晶体中产生电压,加速度传感器将这个压力转换为速度和方向。
1.1.1工作原理如上图的模型所示,加速度传感器包含微观晶体结构,当发生振动时会产生电压,然后产生的电压会产生加速度的读数。
1.1.2优缺点压电加速度传感器的优点是:1).结构简单,取材方便;2).安装方便,使用寿命长。
压电加速度传感器的缺点:1)谐振频率高,容易受到声音的干扰;2)输出阻抗高,输出信号弱,传感器输出信号需要经过放大电路放大后才能送检测电路检测。
1.2 速度传感器速度传感器可以测量振动的速度。
它适用于低频振动测量和对振动的整体评估,速度传感器可以直接测量振动,并提供振动速度的输出信号。
与加速度传感器相比,速度传感器具有较低的灵敏度和频率响应。
图1(a)图1(b)1.2.1工作原理速度传感器的结构示意如图1(a)所示。
一个圆筒形的线圈固定在外壳内壁,线圈中间有一个永磁铁支承在弹簧上。
传感器的外壳固定在被测对象上,以承受振动。
永磁铁(参振质量)、弹簧和阻尼组成了一个单自由度系统图1(b)。
在设计时使该系统的固有频率远低于被测物振动的频率。
这时在被测物振动时,永磁铁在空间处于静止状态,永磁铁相对于线圈的运动即为被测物的运动。
布置方式:测量轴承座振动(简称座振)时,需要测量垂直、水平、轴向三个方向的振动,因此传感器的位置,也即测点的布置如下图所示。
微悬臂梁光致弯曲效应的研究的开题报告一、研究背景光致弯曲效应是指光对材料的能量转换作用下,使平面构件产生弯曲变形的现象。
该效应被广泛应用于微机电系统(MEMS)器件中,如光学开关、活塞、调制器等,是光学器件中的一项重要技术。
微悬臂梁是一类典型的MEMS器件,其主要由基底和悬臂梁组成,可用于扫描光学、力传感等领域。
微悬臂梁的光致弯曲效应研究具有重要意义,可以帮助深入了解光致弯曲效应的物理本质和应用特性。
二、研究目的本研究旨在通过理论分析和数值模拟,研究微悬臂梁光致弯曲效应的特征、机制和应用。
具体目标如下:1. 研究微悬臂梁的结构参数和材料参数对光致弯曲效应的影响。
2. 分析微悬臂梁的应力和形变分布情况,探究其光致弯曲效应产生的物理机制。
3. 研究微悬臂梁的光致弯曲效应在力传感和光学开关等方面的应用,为其实际应用提供理论设计依据。
三、研究方法1. 建立微悬臂梁的数学模型,考虑其光致弯曲效应产生的物理机制,分析其应力和形变分布情况。
2. 利用有限元分析软件ANSYS进行数值模拟,验证理论分析结果的正确性。
3. 研究微悬臂梁的优化设计,包括结构参数和材料参数的优化,提高其光致弯曲效应和应用性能。
4. 实验验证研究成果,在微悬臂梁光学传感和压力传感等方面进行应用验证。
四、研究意义1. 对微悬臂梁光致弯曲效应机理的深入研究,有助于揭示其物理本质和应用特性,为其进一步应用提供理论基础。
2. 通过理论分析和数值模拟,提高微悬臂梁的光致弯曲效应和应用性能,有利于其在微机电系统器件中的应用。
3. 研究微悬臂梁的光致弯曲效应应用,拓展其在光学器件、力学传感和微型机械控制等领域的应用前景,具有重要的实际应用价值。
五、预期成果1. 发表一篇SCI论文,解析微悬臂梁光致弯曲效应机理和特性,提高其应用性能。
2. 实现微悬臂梁的数值模拟和实验研究,对其在光学器件、力学传感和微型机械控制等领域进行应用验证。
3. 获得微悬臂梁的优化设计方案,提高其光致弯曲效应和应用性能,为MEMS器件的实际应用提供技术支持。
光学测力传感器的研究与应用光学测力传感器是一种利用光学测量原理进行测量的传感器,目前广泛应用于研究机械系统和材料力学性质等方面。
本文将从两个方面探讨光学测力传感器的研究和应用,即光学测量原理和传感器在力学实验中的应用。
一、光学测量原理光学测力传感器是利用激光或光纤传输光信号,在光线因力变形而产生光程差的基础上推导测出力的大小。
由于光在真空中传播的速度唯一,因此光波经过力的作用会产生光程差,通过测量光波的相位差,可以计算出力的大小。
在光学测力传感器中,激光光束通过一块玻璃板,在离开玻璃板的位置,由于受到力的作用,光线会发生相位变化。
该相位变化可以通过相干检测器进行检测和测量,进而计算出力的大小。
另外,由于光线在传播过程中会产生衍射和干涉等现象,因此光学测力传感器在测量力的大小时还需要考虑这些影响因素。
二、传感器在力学实验中的应用光学测力传感器目前广泛应用于机械系统力学实验和材料力学性质研究中。
下面将介绍传感器在这两个领域的应用。
1. 机械系统力学实验机械系统力学实验是研究机械系统力学性能和特性的一种重要手段。
在机械系统力学实验中,光学测力传感器被广泛用于测量机械系统的应力、应变、扭矩等参数。
例如,在无人机研发中,需要对机械系统进行力学实验,以测试其性能和耐久度。
在这个过程中,光学测力传感器可以安装在无人机机架中,通过测量机架在不同载荷下的变形来评估其结构的稳定性和强度。
此外,光学测力传感器还可以用于测量轮辐、液压钳等机械零件的应变和应力分布情况,以帮助机械工程师评估这些零件在工作中的性能。
2. 材料力学性质研究材料力学性质研究是研究材料在受力作用下的物理学特性和力学性能的一种重要方法。
在材料力学性质研究中,光学测力传感器可以用于测量材料在不同载荷下的应力、应变、力学性能等参数。
例如,对于弹性材料的研究,可以通过光学测力传感器测量这些材料在不同拉伸载荷下的应变变化情况,从而分析材料的应力-应变关系以及弹性模量等性质。
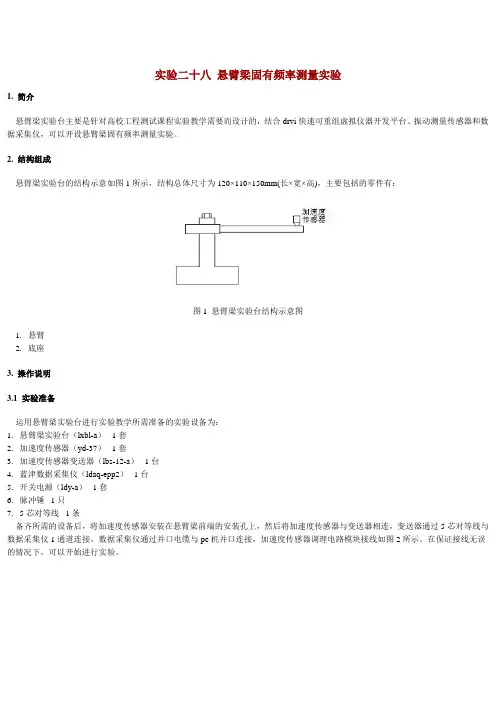
实验二十八悬臂梁固有频率测量实验1. 简介悬臂梁实验台主要是针对高校工程测试课程实验教学需要而设计的,结合drvi快速可重组虚拟仪器开发平台、振动测量传感器和数据采集仪,可以开设悬臂梁固有频率测量实验。
2. 结构组成悬臂梁实验台的结构示意如图1所示,结构总体尺寸为120×110×150mm(长×宽×高),主要包括的零件有:图1 悬臂梁实验台结构示意图1. 悬臂2. 底座3. 操作说明3.1 实验准备运用悬臂梁实验台进行实验教学所需准备的实验设备为:1. 悬臂梁实验台(lxbl-a)1套2. 加速度传感器(yd-37)1套3. 加速度传感器变送器(lbs-12-a)1台4. 蓝津数据采集仪(ldaq-epp2)1台5. 开关电源(ldy-a)1套6. 脉冲锤1只7. 5芯对等线1条备齐所需的设备后,将加速度传感器安装在悬臂梁前端的安装孔上,然后将加速度传感器与变送器相连,变送器通过5芯对等线与数据采集仪1通道连接,数据采集仪通过并口电缆与pc机并口连接,加速度传感器调理电路模块接线如图2所示。
在保证接线无误的情况下,可以开始进行实验。
图2 加速度传感器调理电路接线示意图3.2 实验操作悬臂梁固有频率测量实验利用加速度传感器来测量悬臂振动的信号,经过频谱变换(fft)处理后得到悬臂梁的一阶固有频率,需要注意的是该实验数据采集采用预触发方式,数据采集仪的触发电平要根据现场情况进行设置,实验过程如下:1. 启动服务器,运行drvi主程序,开启drvi数据采集仪电源,然后点击drvi快捷工具条上的“联机注册”图标,进行服务器和数据采集仪之间的注册。
联机注册成功后,启动drvi内置的“web服务器功能”,开始监听8500端口。
图3 悬臂梁固有频率测量实验样本图2. 启动drvi中的“悬臂梁固有频率测量”实验脚本,然后设定数据采集仪的工作模式为外触发采样,同时设置触发电平(如800)和预触发点数(如20),然后点击“运行”按钮启动采样过程(由于采用外触发采样方式,此时处于等待状态)。
AFM微悬臂梁探针弹性常数各种标定方法的比较与分析宋云鹏;吴森;傅星;徐临燕【摘要】Micro-cantilever probe is an important force sensor in atomic force microscope (AFM) based micro-or nano-Newton force measurement. The accuracy of the spring constant is of great significance to the reliability of the force measurement result. At present,many calibration methods have been proposed,but every method has its’limitations, and the accuracy of each method is different. So,the comparison of different method is needed to make a choice of which method is the best one. The normal spring constant of three kinds of commercial cantilevers are calibrated with the traceable spring constant calibration system built in our laboratory. The calibration principle is based on balance method. Then three other calibration methods (the dimensional method,the Sader method,and the thermal noise method) are used to calibrate the test cantilevers again. We compared the calibration results of different methods and discussed the advantages and shortcomings of each method in detail. The analysis results indicate that in comparison with other methods, the balance method has wider application range,higher accuracy and traceability to SI. It can become one of the best methods in calibration of the spring constant of various cantilevers accurately.%微悬臂梁探针是基于原子力显微镜(AFM)的微纳尺度力学测试中重要的力传感元件,其弹性常数的准确程度直接影响力学测量结果的可靠性。
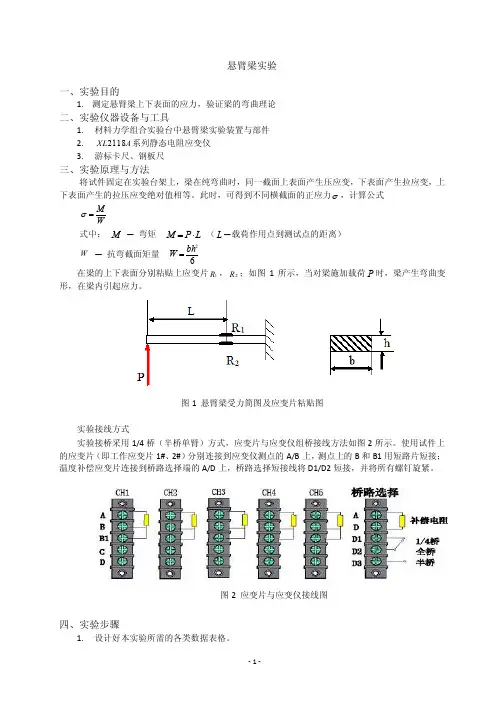
悬臂梁实验一、实验目的1. 测定悬臂梁上下表面的应力,验证梁的弯曲理论二、实验仪器设备与工具1. 材料力学组合实验台中悬臂梁实验装置与部件2. A XL 2118系列静态电阻应变仪3. 游标卡尺、钢板尺三、实验原理与方法将试件固定在实验台架上,梁在纯弯曲时,同一截面上表面产生压应变,下表面产生拉应变,上下表面产生的拉压应变绝对值相等。
此时,可得到不同横截面的正应力σ,计算公式WM =σ 式中: M — 弯矩 L P M ⋅= (L —载荷作用点到测试点的距离)W — 抗弯截面矩量 62bh W =在梁的上下表面分别粘贴上应变片R 1,R 2;如图1所示,当对梁施加载荷P 时,梁产生弯曲变形,在梁内引起应力。
图1 悬臂梁受力简图及应变片粘贴图实验接线方式实验接桥采用1/4桥(半桥单臂)方式,应变片与应变仪组桥接线方法如图2所示。
使用试件上的应变片(即工作应变片1#、2#)分别连接到应变仪测点的A/B 上,测点上的B 和B1用短路片短接;温度补偿应变片连接到桥路选择端的A/D 上,桥路选择短接线将D1/D2短接,并将所有螺钉旋紧。
四、实验步骤1. 设计好本实验所需的各类数据表格。
图2 应变片与应变仪接线图2. 测量悬臂梁的有关尺寸,确定试件有关参数。
见附表13. 拟订加载方案。
选取适当的初载荷P 0,估算最大载P max (该实验载荷范围≤50N),一般分4~6级加载。
4. 实验采用多点测量中半桥单臂公共补偿接线法。
将悬臂梁上两点应变片按序号接到电阻应变仪测试通道上,温度补偿片接电阻应变仪公共补偿端。
5. 按实验要求接好线,调整好仪器,检查整个测试系统是否处于正常工作状态。
6. 实验加载。
用均匀慢速加载至初载荷P 0。
记下各点应变片初读数,然后逐级加载,每增加一级载荷,依次记录各点应变仪的εi ,直至终载荷。
实验至少重复三次。
见附表27. 作完实验后,卸掉载荷,关闭电源,整理好所用仪器设备,清理实验现场,将所用仪器设备复原,实验资料交指导教师检查签字。

微纳悬臂梁力学传感器弯曲振动模式的光学测量微纳悬臂梁机械振子体积小质量低是检测微小环境变化的良好传感器,是包括原子力显微镜和磁力显微镜在内很多扫描探针显微镜的核心器件。
自从原子力显微镜发明以来,微纳悬臂梁机械振子在基础研究和应用方面都取得了巨大的进展。
在磁共振力显微镜的研究中,微纳悬臂梁也是一个重要的组成部分,用于跨学科的研究,如有关分子吸附和纳米机电系统的生物物理学。
最近的一些发展表明利用微纳悬臂梁弯曲的多个振动模式参与传感过程,可以获得更多环境检测能力和灵敏度,如质量谱成像和两维矢量力场的实验探测。
其中关于微纳悬臂梁测量的一个挑战是测量和确定其弯曲振动模式。
在弯曲振动模式的参数中,振动方向,即机械振子振动方向相对光轴或测量方向的角度,是影响整个测量系统后续分析的重要因素之一。
矢量力显微是一种特别适合表征样品形貌以及微小探针-样品间力信号的普适技术,通过监测在扫描样品表面时振动模式的频率改变和振动方向可以得到二维矢量力场图以此提供更多的信息。
针对研制的微透镜光纤干涉仪,分析了微纳悬臂梁机械振子光学测量中光干涉和光散射两种物理效应。
研究分为以下三个部分:1.我们发现,结合光在光纤端面和悬臂梁上两个反射所形成干涉效应和光在微纳悬臂梁上的背向散射效应,可以实现对微纳悬臂梁在聚焦光平面内和聚焦光平面外的位移测量。
特别的,对于微纳悬臂梁聚焦光平面内的位移测量,我们研制的微透镜光纤干涉仪与传统的光散射仪器相比,不需要四象限光电探测器,极大的降低了光路复杂性,需要准直的光学器件由3个降为2个,便于其应用于极低温系统中。
2.理论分析了使用微透镜光纤干涉仪测量机械振子任意方向振动最佳工作点的优化,并通过实验测量沿不同方向振动的悬臂梁,证实了我们的分析。
基于以上研究结果,我们测量了两个微米线悬臂梁的热振动,分析其振动方向。
我们的研究结果为机械振子弯曲振动模式提供了新的实验研究手段,为其在矢量力测量中的应用夯实了基础。
3.提出了一个实验确定微纳悬臂梁弯曲振动模式振动方向的方法。
该方法不需要对微纳悬臂梁有先验知识,也不需要同时测量一对近简并的弯曲振动模式。
利用我们的微透镜光纤干涉仪,通过选择不同的工作点,即选择两个不同的振动投影方向,我们实验确定了一个微米线悬臂梁前3
个弯曲振动模式的振动方向。
我们的研究结果为机械振子弯曲振动模式提供了新的实验研究手段,为其在矢量力测量中的应用夯实了基础。