清洁机器人路径规划算法研究综述
- 格式:pdf
- 大小:675.23 KB
- 文档页数:5
机器人智能路径规划技术研究近年来,随着科技的发展,机器人科学日益成为人们关注的热点。
机器人作为一种个性化的智能技术,其应用范围越来越广泛,尤其是在工业生产领域中的应用越来越重要。
在工业生产中,机器人智能路径规划技术是一个极其重要的技术,在此,本文将深入探讨机器人智能路径规划技术研究的相关内容。
一、机器人智能路径规划概述机器人智能路径规划是机器人技术领域中的一个重要组成部分,其目的是使机器人能够在不同环境中进行智能导航,实现自主运动。
大致而言,智能路径规划是指利用先进算法将机器人引导至预定位置的技术,其核心思想是将机器人操作员从低级的任务中解脱出来,让机器人能够自主完成工作。
目前,机器人智能路径规划方法主要包括基于全局地图、局部感知器、机器视觉和激光等多个方面的创新技术。
其中,基于全局地图技术是目前使用最广泛的方法之一,该方法的主要作用是寻找一条从起点到终点的最短路径,并采用避障策略来避开障碍物,并实现机器人在复杂环境下的自主导航。
此外,局部感知器、机器视觉和激光等技术的应用也能帮助机器人实现智能路径规划,这些新技术不仅提供了更完整、更准确的空间数据信息,而且保证了机器人在各种复杂环境中的自主导航和操作。
二、机器人智能路径规划技术研究热点近年来,随着机器人智能路径规划技术的不断发展,新的研究热点也不断浮现出来。
目前,最主要的热点主要包括以下几个方面:1. 基于深度学习的机器人智能路径规划深度学习是近年来人工智能领域发展最快的技术之一,它可以自动从大量的数据中获得信息,并可以自主学习和改进。
在机器人领域中,应用深度学习技术可用于机器人智能路径规划,目前相关的研究也越来越受到了重视。
2. 基于物体识别与跟踪的机器人智能路径规划随着机器视觉技术的不断发展,物体识别与跟踪技术也得到了广泛应用,和机器人智能路径规划也有着千丝万缕的联系。
通过物体识别与跟踪技术,机器人能够自主掌握环境信息,从而更好地规划路径。
清洁机器人论文关于清洁生产的论文清洁机器人全覆盖算法的研究摘要:本文针对自主清洁机器人提出基于网格地图表示方法的内螺旋覆盖算法,完全覆盖所有区域,同时该算法不用进行复杂的数学计算。
最后利用Matlab7.1进行了仿真,实现结果表明该算法具有很好的实用性。
关键词:清洁机器人;内螺旋覆盖;全覆盖1研究背景与内容清洁机器人作为服务机器人可用于危险的场所来代替人类工作,具有极为广泛的应用前景。
目前如伊莱克斯、日立等世界著名公司都已开发出智能清洁机器人[1]。
本研究主要根据自主清洁机器人的特点提出避障方法,并且对全区域覆盖算法进行了研究。
2全覆盖算法2.1 全覆盖路径规划本研究采用基于环境地图的遍历路径规划,即机器人首先通过其自身传感器对未知清扫环境进行扫描,建立起地图并存储,随后机器人根据己建立环境地图进行遍历清扫及避障[2]。
2.2 内螺旋覆盖算法在覆盖的过程中,首先采取从边界的某一初始点出发,进行沿边界探索,同时生成内侧点为下一轮可覆盖点,在边界探索完毕之后,沿着上一轮生成的内侧点进行覆盖,同时又生成新的下一轮的可覆盖点,本文称这样的覆盖算法叫做内螺旋覆盖算法。
2.3 环境地图的表示-网格地图本文采用网格法来建立网格地图,采用二维矩形网格表示环境[3]。
设环境的最大长度为L,宽度为W,清扫机器人的大小设为B×B。
每个矩形网格有一个CellValue值。
CellValue值表示单元网格的状态标记值如下:CellValue[i][j] =0: 表明网格为可以通过的标记值=10: 表明网格为不可以通过的标记值=20: 表明网格为已经走过的标记值=25: 表明网格为房间单信道的标记值=30: 表明网格为下一轮待覆盖的标记值本研究采用了3个环境类型:空房间、简单房间(有一定障碍物)、复杂房间(多房间且内部有密集障碍)。
3算法实现及其描述3.1 定义概念定义1:以机器人的当前运动方向为参照,从机器人的前方向左转90°所代表的方向为内侧方向,位于内侧方向上的网格称为内侧网格。
智能水下机器人中的目标检测与路径规划算法研究智能水下机器人是一种具有自主控制能力的机器人,能够在水下环境中执行各种任务,如海洋勘探、水下资源开发以及环境监测等。
其中,目标检测和路径规划算法是智能水下机器人实现自主导航和任务执行的关键技术。
本文将重点研究智能水下机器人中的目标检测与路径规划算法,以提高其在水下任务中的效能和准确性。
一、智能水下机器人中的目标检测算法研究目标检测是智能水下机器人实施任务的基础。
在水下环境中,目标的特征信息可能会被水流、污浊的水质以及海洋生物的遮挡所打乱和干扰。
因此,如何在复杂条件下准确地检测目标是一个具有挑战性的问题。
首先,基于深度学习的目标检测算法被广泛应用于智能水下机器人。
这些算法通过从大量的水下图像数据中学习特征,能够自动地、高效地检测水下目标。
其中,卷积神经网络(CNN)是最常用的深度学习模型之一。
通过训练大规模的水下图像数据集,可以提高目标检测的准确性。
其次,传统的计算机视觉方法也可以用于水下目标检测。
例如,基于模板匹配的目标检测方法可以通过与已知目标模板的相似度计算来判断水下目标。
此外,基于图像分割和边缘检测的方法也可以用于提取目标的形状和轮廓信息。
最后,多传感器融合技术可以进一步提高智能水下机器人的目标检测效果。
通过融合来自多个传感器的数据,如摄像机、声纳和激光雷达等,可以获得更全面、准确的目标信息。
例如,将图像和声纳数据融合可提高在低能见度条件下的目标检测。
二、智能水下机器人中的路径规划算法研究路径规划是智能水下机器人实现导航和避障的关键技术。
在水下环境中,机器人需要根据目标位置和环境信息选择最佳路径,避免障碍物、优化能源消耗等。
首先,基于图搜索的路径规划算法是最常用的方法之一。
例如,A*算法可以在有限时间内找到最优路径。
该算法通过评估每个可能路径的代价函数,并根据评估结果选择最佳路径。
另外,Dijkstra算法、深度优先搜索算法和广度优先搜索算法也可以应用于水下机器人的路径规划。
1. 自主机器人近距离操作运动规划体系在研究自主运动规划问题之前,首先需建立相对较为完整的自主运动规划体系,再由该体系作为指导,对自主运动规划的各项具体问题进行深入研究。
本节将根据自主机器人的思维方式、运动形式、任务行为等特点,建立与之相适应的自主运动规划体系。
并按照机器人的数量与规模,将自主运动规划分为单个机器人的运动规划与多机器人协同运动规划两类规划体系。
1.1单个自主机器人的规划体系运动规划系统是自主控制系统中主控单元的核心部分,因此有必要先研究自主控制系统和其主控单元的体系结构问题。
自主控制技术研究至今,先后出现了多种体系结构形式,目前被广泛应用于实践的是分布式体系结构,其各个功能模块作为相对独立的单元参与整个体系。
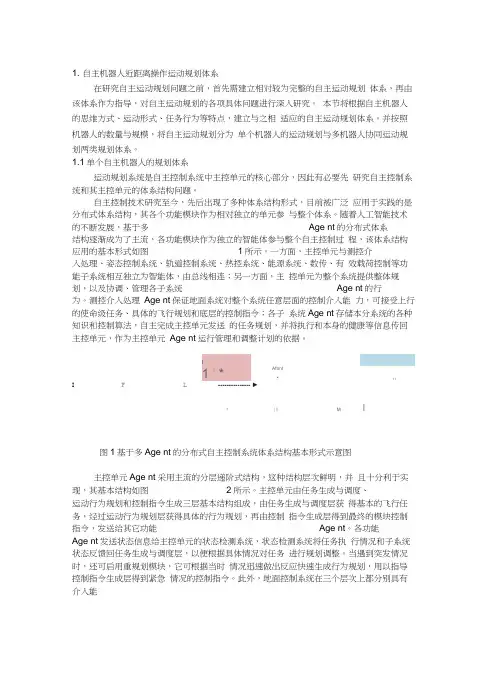
随着人工智能技术的不断发展,基于多Age nt的分布式体系结构逐渐成为了主流,各功能模块作为独立的智能体参与整个自主控制过程,该体系结构应用的基本形式如图1所示。
一方面,主控单元与测控介入处理、姿态控制系统、轨道控制系统、热控系统、能源系统、数传、有效载荷控制等功能子系统相互独立为智能体,由总线相连;另一方面,主控单元为整个系统提供整体规划,以及协调、管理各子系统Age nt的行为。
测控介入处理Age nt保证地面系统对整个系统任意层面的控制介入能力,可接受上行的使命级任务、具体的飞行规划和底层的控制指令;各子系统Age nt存储本分系统的各种知识和控制算法,自主完成主控单元发送的任务规划,并将执行和本身的健康等信息传回主控单元,作为主控单元Age nt运行管理和调整计划的依据。
I1 ' *Aftrnt*11I F L --------------- ►* .——川 ------ M I 图1基于多Age nt的分布式自主控制系统体系结构基本形式示意图主控单元Age nt采用主流的分层递阶式结构,这种结构层次鲜明,并且十分利于实现,其基本结构如图2所示。
主控单元由任务生成与调度、运动行为规划和控制指令生成三层基本结构组成,由任务生成与调度层获得基本的飞行任务,经过运动行为规划层获得具体的行为规划,再由控制指令生成层得到最终的模块控制指令,发送给其它功能Age nt。
机器人路径规划算法机器人路径规划算法是指通过特定的计算方法,使机器人能够在给定的环境中找到最佳的路径,并实现有效的移动。
这是机器人技术中非常关键的一部分,对于保证机器人的安全和高效执行任务具有重要意义。
本文将介绍几种常见的机器人路径规划算法,并对其原理和应用进行探讨。
一、迷宫走迷宫算法迷宫走迷宫算法是一种基本的路径规划算法,它常被用于处理简单的二维迷宫问题。
该算法通过在迷宫中搜索,寻找到从起点到终点的最短路径。
其基本思想是采用图的遍历算法,如深度优先搜索(DFS)或广度优先搜索(BFS)等。
通过递归或队列等数据结构的应用,寻找到路径的同时保证了搜索的效率。
二、A*算法A*算法是一种启发式搜索算法,广泛应用于机器人路径规划中。
该算法通过评估每个节点的代价函数来寻找最佳路径,其中包括从起点到当前节点的实际代价(表示为g(n))和从当前节点到目标节点的估计代价(表示为h(n))。
在搜索过程中,A*算法综合考虑了这两个代价,选择总代价最小的节点进行扩展搜索,直到找到终点。
三、Dijkstra算法Dijkstra算法是一种最短路径算法,常用于有向或无向加权图的路径规划。
在机器人路径规划中,该算法可以用来解决从起点到目标点的最短路径问题。
Dijkstra算法的基本思想是,通过计算起点到每个节点的实际代价,并逐步扩展搜索,直到找到目标节点,同时记录下到达每个节点的最佳路径。
四、RRT算法RRT(Rapidly-exploring Random Tree)是一种适用于高维空间下的快速探索算法,常用于机器人路径规划中的避障问题。
RRT算法通过随机生成节点,并根据一定的规则连接节点,逐步生成一棵树结构,直到完成路径搜索。
该算法具有较强的鲁棒性和快速性,适用于复杂环境下的路径规划。
以上介绍了几种常见的机器人路径规划算法,它们在不同的场景和问题中具有广泛的应用。
在实际应用中,需要根据具体的环境和需求选择合适的算法,并对其进行适当的改进和优化,以实现更好的路径规划效果。
移动机器人路径规划和轨迹跟踪算法在当今科技飞速发展的时代,移动机器人已经在众多领域得到了广泛的应用,从工业生产中的自动化物流搬运,到家庭服务中的智能清洁机器人,再到医疗领域的辅助手术机器人等等。
而要让这些移动机器人能够高效、准确地完成各种任务,关键就在于其路径规划和轨迹跟踪算法的有效性。
路径规划,简单来说,就是为移动机器人找到一条从起始点到目标点的最优或可行路径。
这就好像我们在出门旅行前规划路线一样,要考虑距离、路况、时间等诸多因素。
对于移动机器人而言,它所面临的环境可能更加复杂多变,比如充满障碍物的工厂车间、人员密集的商场等。
因此,路径规划算法需要具备强大的计算能力和适应能力。
常见的路径规划算法有很多种,比如基于图搜索的算法,像 A 算法。
A 算法通过对地图进行网格化,并为每个网格节点赋予一个代价评估值,从而逐步搜索出最优的路径。
它的优点是能够快速找到较优的路径,但在处理大规模地图时,计算量可能会较大。
还有基于采样的算法,如快速扩展随机树(RRT)算法。
RRT 算法通过在空间中随机采样,并逐步扩展生成树的方式来探索路径。
这种算法在高维空间和复杂环境中的适应性较强,但可能得到的路径不是最优的。
另外,基于人工势场的算法也是一种常用的方法。
它将目标点视为吸引源,障碍物视为排斥源,通过计算合力来引导机器人运动。
这种算法计算简单,但容易陷入局部最优。
轨迹跟踪则是在已经规划好路径的基础上,让机器人能够准确地按照预定的路径进行运动。
这就要求机器人能够实时感知自身的位置和姿态,并根据与目标轨迹的偏差进行调整。
在轨迹跟踪中,PID 控制器是一种常见的方法。
它通过比例、积分和微分三个环节的作用,对偏差进行修正。
PID 控制器简单易用,但对于复杂的非线性系统,其控制效果可能不够理想。
为了提高轨迹跟踪的精度和鲁棒性,现代控制理论中的模型预测控制(MPC)也得到了广泛应用。
MPC 通过预测未来一段时间内的系统状态,并优化控制输入,来实现更好的跟踪性能。
《多移动机器人路径规划算法及实验研究》篇一一、引言随着科技的快速发展,多移动机器人系统在各个领域得到了广泛的应用,如军事、救援、生产制造等。
这些应用中,路径规划作为多移动机器人系统中的关键技术之一,具有重要的研究价值。
路径规划的主要目标是确保机器人能够在复杂的空间环境中有效地进行运动和操作。
因此,本篇论文旨在探讨多移动机器人的路径规划算法,并基于实验数据对其性能进行评估。
二、多移动机器人路径规划算法2.1 算法概述多移动机器人路径规划算法主要包括环境建模、路径搜索和路径优化三个步骤。
首先,通过传感器数据对环境进行建模,以确定机器人的可行走区域和障碍物分布。
然后,根据目标位置和约束条件,使用搜索算法在地图上寻找可能的路径。
最后,对搜索到的路径进行优化,以满足实时性和效率要求。
2.2 常用算法介绍(1)基于图搜索的算法:该类算法将环境建模为图结构,通过搜索节点和边来寻找最短路径。
常见的图搜索算法包括广度优先搜索、深度优先搜索和A算法等。
(2)基于势场法的算法:该类算法通过模拟势场来引导机器人运动,具有较好的实时性。
常见的势场法包括人工势场法、虚拟力场法等。
(3)基于遗传算法的路径规划:遗传算法是一种基于生物进化原理的优化算法,可以应用于多移动机器人的路径规划中。
该算法能够同时处理多个机器人和复杂环境,具有较强的全局寻优能力。
三、实验研究3.1 实验环境与设备实验在仿真环境和实际环境中进行。
仿真环境采用ROS (Robot Operating System)搭建的仿真平台,实际环境为室内和室外复杂空间环境。
实验设备包括多台具有自主导航能力的移动机器人及相关传感器设备。
3.2 实验方法与步骤(1)在仿真环境中,对不同路径规划算法进行测试,记录各算法的路径长度、运行时间等指标。
(2)在实际环境中,对不同场景下的多移动机器人进行路径规划实验,观察机器人的实际运行情况及性能表现。
(3)基于实验数据对各算法的优劣进行分析和评估,包括对运行时间、路径长度、成功率等指标进行量化评价。
机器人导航中的路径规划算法随着人工智能和机器人技术的不断进步,机器人导航已经变得越来越普遍。
机器人导航中的路径规划算法起着至关重要的作用,它能够帮助机器人找到最佳路径来完成给定任务。
本文将讨论机器人导航中常用的路径规划算法及其特点。
一、最短路径算法最短路径算法是机器人导航中最常用的算法之一。
它的目标是找到两点之间的最短路径,使机器人能够以最快的速度到达目的地。
其中,最著名的算法是Dijkstra算法和A*算法。
1. Dijkstra算法Dijkstra算法是一种基于图的搜索算法,它通过计算从起点到终点的最短路径来引导机器人导航。
该算法从起点开始,逐步扩展搜索范围,每次找到当前距离起点最短的节点,并将其加入已经访问过的节点集合中。
同时,更新其他节点的最短距离值,直到找到终点或者搜索完整个图。
Dijkstra算法的优点是保证能够找到最短路径,但计算复杂度较高,适合用于小规模的导航问题。
2. A*算法A*算法是一种启发式搜索算法,结合了广度优先搜索和启发式估计函数的思想。
与Dijkstra算法相比,A*算法通过引入启发式函数来提高搜索效率,从而在更短的时间内找到最短路径。
在A*算法中,每个节点都会被分配一个估计值,与该节点到终点的预计距离相关。
A*算法会优先搜索具有较小估计值的节点,从而尽快找到最短路径。
这种估计函数可以根据具体问题的特点来设计,例如欧氏距离、曼哈顿距离等。
A*算法在大多数情况下比Dijkstra算法更高效,但在某些特殊情况下可能会出现误导机器人的问题。
二、避障路径规划算法除了找到最短路径,机器人导航还需要考虑避障问题。
避障路径规划算法能够帮助机器人避开障碍物,安全到达目的地。
以下是两种常用的避障路径规划算法:1. Voronoi图Voronoi图是一种基于几何空间的路径规划算法。
它通过将已知障碍物的边界等分成小区域,形成一张图。
机器人可以在保持离障碍物最远的同时,选择通过Voronoi图中的空区域进行移动。
移动机器人路径规划和轨迹跟踪算法在当今科技迅速发展的时代,移动机器人正逐渐成为各个领域的重要工具,从工业生产中的自动化运输,到医疗领域的服务机器人,再到家庭中的智能清洁设备,它们的身影无处不在。
而要让这些移动机器人能够高效、准确地完成任务,路径规划和轨迹跟踪算法就显得至关重要。
路径规划,简单来说,就是为移动机器人找到一条从起始点到目标点的最优或可行路径。
这就好像我们出门旅行,需要规划出一条既省时又省力的路线。
而轨迹跟踪,则是让机器人能够按照预定的路径或轨迹准确地移动,避免偏离“既定路线”。
在路径规划方面,有许多不同的方法和策略。
其中,基于地图的规划方法是比较常见的一种。
就好比我们在手机上使用地图导航,机器人也需要一个对其工作环境的“地图”认知。
这个地图可以是事先通过传感器获取并构建的,也可以是根据机器人在运行过程中的实时感知不断更新完善的。
例如,栅格地图法将工作空间划分为一个个小的栅格,每个栅格都有相应的状态标识,比如是否可通行。
通过对这些栅格的分析和计算,机器人就能找到可行的路径。
这种方法简单直观,但对于复杂环境可能会出现精度不够或者计算量过大的问题。
另外,还有基于几何形状的规划方法。
比如,利用圆形、矩形等简单几何图形来描述机器人和障碍物的形状和位置,通过几何运算来确定可行路径。
这种方法在一些规则环境中效果较好,但对于形状不规则的障碍物处理起来可能就比较棘手。
除了这些传统方法,近年来随着人工智能技术的发展,一些基于深度学习的路径规划算法也逐渐崭露头角。
通过让机器人学习大量的环境数据和路径样本,它能够自动生成适应不同环境的路径规划策略。
轨迹跟踪算法则致力于确保机器人能够精准地沿着规划好的路径移动。
常见的轨迹跟踪算法包括 PID 控制算法、模型预测控制算法等。
PID 控制算法是一种经典的控制算法,它通过比例、积分和微分三个环节的作用,来调整机器人的控制输入,从而使机器人的实际轨迹尽量接近预定轨迹。
清洁机器人的工作原理
清洁机器人是一种能够自动或者手动控制进行清洁的机器人。
它们通常被用于家庭、办公室、酒店等场所的地面清洁工作。
本文将详细介绍清洁机器人的工作原理。
一、工作原理
1、传感器检测
清洁机器人通常配备有多种传感器,包括红外线传感器、超声波传感器等,这些传感器可以帮助机器人检测环境中的障碍物,如家具、电线等。
当机器人遇到障碍物时,传感器会检测到并指导机器人绕过障碍物。
2、路径规划
清洁机器人通常采用路径规划算法来确定最佳的清洁路径。
这些算法可以根据房间的形状和大小、障碍物的位置等因素来计算最有效的清洁路径。
机器人会按照这个路径进行清洁,确保每个区域都能被覆盖到。
3、自动充电
当清洁机器人电量不足时,它们会自动返回到充电基座进行充电。
充电基座通常配备有红外线感应器,当机器人返回到充电基座时,感应器会指导机器人插入充电接口。
当电量充满后,机器人会继续未完成的清洁任务。
4、语音控制和交互
现代的清洁机器人通常配备有语音识别系统,用户可以通过语音控制机器人的动作和功能。
例如,用户可以通过语音指令让机器人去清扫某个特定的房间或者区域。
此外,机器人还可以通过语音和用户进行简单的交互,例如报告当前的电量状态或者清洁进度等。
二、结论
清洁机器人的工作原理是基于传感器检测、路径规划、自动充电和语音控制等技术来实现自动或半自动的清洁工作。
通过使用这些技术,清洁机器人可以有效地完成各种地面清洁任务,为用户节省时间和精力。
随着技术的不断发展,我们可以期待清洁机器人未来将具备更加智能和高效的功能,为我们的生活带来更多的便利和舒适。
扫地机器人研究报告扫地机器人研究报告一、研究背景和目的扫地机器人是一种能够自主清扫地面的机器人,它可以替代人工清扫的工作,并且具有高效、精准和可靠的特点。
本研究的目的是探讨扫地机器人在日常生活和商业场所中的应用,研究其性能和功能,为进一步的开发和改进提供参考。
二、研究方法本研究主要使用文献研究法和实验研究法,通过查阅大量相关文献和借助实验设备对扫地机器人进行性能测试和功能评估。
三、研究内容和结果1. 扫地机器人的性能评估:通过对扫地机器人的清扫效果、清扫速度和清扫范围进行测试,评估其清扫能力和效率。
实验结果表明,扫地机器人在清扫效果方面优于人工清扫,且具有更快的清扫速度和更广的清扫范围。
2. 扫地机器人的功能探索:对扫地机器人的功能进行探索,包括地图绘制、路径规划、碰撞避免和智能避障等。
实验结果显示,扫地机器人能够自主制作地图,并根据地图进行路径规划,同时具备碰撞避免和智能避障的能力。
3. 扫地机器人的应用前景:扫地机器人在日常生活和商业场所中具有广阔的应用前景,可以在家庭、办公室、酒店、商场等地方进行清扫工作。
同时还可以应用于医院、学校、工厂等不同环境中的地面清洁工作,为人们提供更加便利和舒适的生活和工作环境。
四、研究结论扫地机器人作为一种新兴的智能家电产品,具有广阔的市场潜力和发展空间。
其性能和功能经过测试和评估,表现出较好的清扫能力和智能化水平。
同时,扫地机器人在日常生活和商业场所中的应用前景也被证实。
在未来的发展中,我们可以进一步改进扫地机器人的性能和功能,提高其效率和可靠性,推动其在各个领域的应用和推广。
五、研究建议1. 进一步研究扫地机器人的目标导航和定位技术,提高其路径规划的精确性和智能化程度。
2. 改进扫地机器人的清扫模式和清扫器件,提高其清扫效果和清扫范围。
3. 探索扫地机器人与其他智能设备的联动,实现更智能化的清洁工作。
4. 加强扫地机器人的安全保护和信息安全,保障用户的隐私和数据安全。
智能巡检机器人设计与路径规划算法研究智能巡检机器人是一种应用于工业、医疗、安防等领域的关键技术,可以代替人力进行巡检任务,提高工作效率和安全性。
本文将对智能巡检机器人的设计以及路径规划算法进行研究,并且分别提出相应的解决方案。
在智能巡检机器人的设计方面,主要包括机器人硬件系统和软件系统两个方面。
机器人硬件系统由机械结构和传感器组成,机械结构需要考虑机器人的稳定性、灵活性和可操作性,传感器要能够感知环境信息并快速准确地传输给软件系统。
软件系统主要包括控制系统和图像处理系统,控制系统需要实现机器人的自主导航和任务执行,图像处理系统能够实现环境识别和障碍物检测。
针对机器人的路径规划算法,首先要考虑到环境地图的建立。
在建立地图的时候可以采用SLAM(Simultaneous Localization and Mapping)算法,通过机器人自身的传感器获取环境的信息,并将其转化为地图的形式。
接下来,在路径规划方面可以采用经典的A*算法。
A*算法是一种基于启发式搜索的算法,通过评估节点的代价函数和估计函数来选择下一个要访问的节点,从而找到最短路径。
在实际应用中,为了提高路径规划的效率,可以结合其他优化算法,如Dijkstra算法、遗传算法等。
对于智能巡检机器人的路径规划算法还有一个重要的考虑因素就是避障。
为了确保机器人在执行巡检任务的过程中不会与环境中的障碍物相撞,可以使用一些避障策略。
最简单且常用的方法是通过距离传感器检测障碍物,并通过避障算法调整机器人的运动方向。
另外,还可以采用基于人工智能的方法,如机器学习和神经网络,通过训练机器人的算法,使其能够自动学习并避免障碍物。
在实际应用中,智能巡检机器人还会涉及到多机器人协同工作的情况。
对于多机器人协同工作的路径规划,可以使用集群算法。
集群算法主要通过将任务分配给不同的机器人,并协调它们之间的工作,以实现任务的高效完成。
除了路径规划算法外,还应考虑智能巡检机器人的实时定位问题。
移动机器人导航与路径规划技术研究近年来,移动机器人导航和路径规划技术得到了快速发展,使得机器人可以在未知环境下自主导航,完成各种任务。
本文将针对移动机器人导航与路径规划技术进行深入研究,探讨其发展现状、关键技术及应用前景。
一、发展现状移动机器人导航与路径规划技术一直处于不断发展的状态。
早期的机器人导航和路径规划方法主要是基于环境地图预先建立的规划路径,但是这种方法的局限性比较大,因为机器人只能在事先建立好的地图中运动,无法在未知环境中进行操作。
随着计算机技术的不断发展,智能移动机器人导航与路径规划技术也得到了迅速发展。
现阶段,移动机器人导航和路径规划技术主要有以下几种。
1. 视觉导航视觉导航技术是指利用机器视觉来获取并分析环境信息,从而实现机器人导航。
视觉导航技术主要包括视觉地标识别和视觉SLAM技术。
视觉地标识别技术是指通过识别环境中的地标来定位机器人位置,实现导航功能。
视觉SLAM技术则是指机器人利用摄像头等传感器来建立地图并同时定位自身,从而实现导航和路径规划。
2. 深度强化学习深度强化学习是指将机器学习技术应用于机器人导航中。
该技术主要依靠先前的经验和知识,建立起机器人状态和环境之间的关系,在不断实践中逐渐学习并优化导航与规划的效果。
3. 环境感知技术环境感知技术是指机器人通过各种传感器来感知周围环境,从而对周围环境进行分析和理解,实现导航和路径规划。
常用的环境感知技术包括激光雷达、摄像头、超声波、红外线传感器等。
二、关键技术移动机器人导航和路径规划技术需要应用多种技术来实现。
以下是其中一些关键技术:1. 定位技术定位技术是指通过各种传感器来定位机器人在环境中的位置和姿态。
常用的定位技术包括全球定位系统(GPS)、激光雷达、惯性测量单元等。
2. 地图构建技术地图构建技术是指将机器人环境感知的结果通过算法来构建出地图,并根据地图来规划机器人路径。
常用的地图构建技术包括基于激光雷达的SLAM算法和基于视觉的SLAM算法。
机器人运动控制与路径规划算法设计机器人的运动控制和路径规划是机器人技术发展中的关键问题之一,它对机器人的定位、移动和任务执行起着决定性的作用。
本文将探讨机器人运动控制与路径规划算法的设计。
一、机器人的运动控制机器人的运动控制是指控制机器人在空间中的位置、方向和速度,实现机器人的精确移动和姿态调整。
机器人的运动控制主要包括本体运动控制和末端执行机构的控制。
1. 本体运动控制本体运动控制是指机器人整体的位置和姿态的控制,它通过控制机器人的关节运动来实现。
常用的本体运动控制方法有速度控制和位置控制两种。
速度控制指的是控制机器人的关节速度,使机器人按照既定的速度规划路径进行运动。
位置控制则是控制机器人达到既定的位置坐标,实现精确的位置控制。
在实际应用中,根据具体的任务需求和机器人的特点,选择合适的控制方法进行本体运动控制。
2. 末端执行机构的控制末端执行机构的控制是指控制机器人末端工具或机械臂的执行器,实现具体的任务操作。
针对不同的末端执行机构,需要设计相应的控制算法。
其中,机器人手臂的控制是应用最广泛的一种末端执行机构控制。
机器人手臂的控制主要涉及到关节控制和末端执行器的控制。
关节控制是指通过控制机器人手臂的关节角度来实现手臂的姿态调整。
末端执行器的控制则是指控制机器人手臂末端执行器进行具体的任务操作,如抓取、放置等。
二、路径规划算法设计路径规划算法是指通过算法计算出机器人在空间中的运动路径,实现机器人在复杂环境中的自主导航和避障。
常用的路径规划算法有全局路径规划算法和局部路径规划算法。
1. 全局路径规划全局路径规划是指计算出机器人从起始点到目标点的最优路径。
该路径规划算法需要综合考虑环境地图、障碍物、机器人的动力学约束等因素,通过搜索算法(如A*算法、Dijkstra算法等)计算机器人的最优路径。
在全局路径规划中,需要离线构建环境地图,并将其与机器人的动力学约束结合,以提高路径规划的准确性和实时性。
机器人手臂路径规划与碰撞检测算法研究机器人技术在现代工业生产和日常生活中扮演越来越重要的角色。
机器人手臂是机器人的重要部分,其路径规划与碰撞检测算法的研究对机器人的运动控制和安全性具有重要意义。
本文将从路径规划和碰撞检测两个方面来探讨相关算法的研究。
一、路径规划算法研究路径规划是指机器人手臂在规定的空间内,根据任务要求找到一条合适的运动路径的过程。
传统的路径规划算法包括最小平方和算法、B样条曲线算法等。
然而,这些算法存在着一些问题,例如计算复杂度高、无法处理复杂环境等。
为了解决这些问题,学者们提出了一系列新的路径规划算法。
近年来,退火算法、遗传算法、蚁群算法等进化计算算法在路径规划中被广泛应用。
这些算法主要通过模拟自然界中各种生物的行为,从而寻找到最优的路径规划结果。
例如,蚁群算法模拟了蚂蚁在寻找食物过程中释放信息素的行为,通过信息素的浓度分布来指导路径的搜索,从而实现了较好的路径规划效果。
此外,机器学习算法在路径规划中也展现了巨大的潜力。
例如,深度强化学习算法可以根据机器人的运动状态和环境信息学习到最佳的动作策略,从而实现自主学习和规划路径。
二、碰撞检测算法研究碰撞检测是指机器人手臂在运动过程中,根据传感器获取到的环境信息来判断是否会与障碍物发生碰撞的过程。
碰撞检测算法的研究与机器人的安全性密切相关。
传统的碰撞检测算法主要基于几何模型和物理模型。
例如,包围盒碰撞检测算法使用简单的包围盒模型来近似表示机器人手臂的几何形状,通过检测包围盒之间的相交关系来进行碰撞检测。
虽然这些算法简单高效,但是无法处理复杂的几何形状和接触约束问题。
为了解决这些问题,学者们提出了一些新的碰撞检测算法。
例如,基于距离场的碰撞检测算法利用距离场来表示机器人手臂与环境的关系,通过计算距离场的梯度信息来判断是否会与障碍物发生碰撞。
这种算法可以有效地处理复杂的几何形状和接触约束问题。
此外,机器学习算法在碰撞检测中也有着广泛的应用。
第30卷第11期 2013年1 1月 机 电 工 程
Journal of Mechanical&Electrical Engineering Vo1.30 No.1I
NOV.20l3
DOI:10.3969/j.issn.1001—4551.2013.11.031
清洁机器人路径规划算法研究综述 赵晓东,鲍 方 (杭州电子科技大学信息与控制研究所,浙江杭州310018)
摘要:针对目前清洁机器人的清洁效率低,同时路径规划技术存实际应用中方法简单、适应性弱,特别是在障碍物环境下存在明显 的不足等问题,提出了路径规划的基本方法及关键过程,保证机器人完成清洁任务,达到自主路径规划和全区域覆盖的要求。着重 分析了环境建模的不同技术,同时讨论了在环境地图中不同的路径搜索算法,通过对算法的覆盖率、重复率等重要性能指标进行了 比较,分析了不同算法的优、缺点及适用范围,为算法的合理应用提供了技术参考,最后提出了清洁机器人进一步研究的方向。研 究结果表明,根据环境的复杂程度,需要采取不同的路径规划算法来制定控制方案,而对多种算法进行融合技术处理则能有效地提 高对不同环境的适用度以及控制系统的鲁棒性。 关键词:清洁机器人;路径规划;环境建模;覆盖率;鲁棒性 中图分类号:TP242.6 文献标志码:A 文章编号:1001—4551(2013)11—1440—05
Survey on cleaning robot path planning algorithm ZHAO Xiao—dong,BAO Fang (Institute of Information and Control,Hangzhou Dianzi University,ttangzhou 310018,China)
Abstract:Aiming at the current problems of cleaning robots inefficient elcaning,and the robots key technology that path planning used in the practical occasions is simple and weak,especially apparent deficiencies exist under the obstacle circumstances,the basic approaches and key process were proposed to ensure that cleaning tasks were completed,and the requirements of autonomous path planning and full regional coverage were achieved.Various technologies on enviromnent model ing were emphatically analyzed,and path search algorithm applied in the environmental map was also discussed,then the advantages and disadvantages and application scope of different algorithms were analyzed by comparing through algorithm performance of coverage and repetition rate,in result,technical reference was provided for reasonable applica— tion,eventually,research direction of future cleaning robot was put forward.The results indicate that,according to the complexity of environ— ment,it takes a diferent path planning algorithm to develop control scheme,but the integration of various algorithms can effectively improve the degree of environmental application and control system robustness. Key words:cleaning robot;path planning;environment modeling;coverage rate;robustness
0 引 言 智能清洁机器人是家用服务机器人的一种,具有 扫地省时、省力,功能多样化,轻便小巧等特点,可大大 减轻人的劳动负担,正成为机器人研究的热点,它具有 较多的科研价值和广阔的市场前景¨ 。智能清洁机 器人是一个庞大的系统,包括移动系统、清扫洗尘系
统、避障系统和垃圾压缩系统 。它拥有强大的多重 感应装置和处理芯片,能够自动辨别目标环境是否干 净,自动躲避障碍物,并根据实际情况采用不同的清洁 策略,以保证完成清洁任务。据有关资料显示,201 1~ 201 2年世界智能清洁机器人取得了很多新进展,例如 美围研制出受伤后可自行调整的机器人、英国设计出 吃苍蝇老鼠的机器人家具、法国研发出“儿童机器
收稿日期:2013—06—20 基金项目:国家自然科学基金资助项目(60974138);浙江省人才汁划资助项目(R10080) 作者简介:赵晓东(1971一),男,山西太原人,博___}-教授,硕士生导师,主要从事控制理论与控制_T程方面的研究E—mail:xdzhao@hdu.edu.ell 第11期 赵晓东,等:清洁机器人路径规划算法研究综述 ・1441・ 人”、欧洲研发出的超级机器人能预知人类意图、韩国 推出手机遥控清洁机器人等,可以说,世界智能清洁机 器人行业发展迅速。 机器人技术是现代科学与技术的交叉和综合的表 现,虽然机器人功能多种多样,但是核心技术是互通 的,即移动系统中的路径规划算法。如何快速寻找到 一条覆盖率高、重复率低等特点的路径,提高清洁机器 人工作效益,成为了路径规划的研究热点。 本研究首先介绍路径规划方法的基本概念,然后 分析各种算法的基本特点并阐释了它们的优、缺点,最 后对该领域未来研究方向进行展望,为研究清洁机器 人路径规划算法提供一个系统的参考。
1路径规划方法介绍 清洁机器人的路径规划是机器人学的一个基本而 又复杂的问题,是指机器人根据所感知的环境信息,按 照某种优化指标在起始点和目标点之间规划出一条与 环境障碍无碰撞并实现全区域覆盖的路径 J。从定 义中可得,清洁机器人路径规划需要解决3个问题:(D 需完成全区域覆盖的清扫任务;②机器人能根据一定 的算法避障;③在众多路径中寻找最优。 由于清洁机器人的路径规划属于全覆盖寻优,基 于这个特殊要求,从而提出路径规划的目标是在封闭 区域内实现机器人的移动路径对工作区域(该文所讨 论的是指室内环境)的最大覆盖率和最小重复率。覆 盖率和重复率是清洁机器人路径规划最主要的两个评 估标准,除了这两个参数当然还有机器人的能量消耗、 未覆盖率、清洁剂消耗量等参数。清洁机器人的全区 域覆盖路径规划可以分为无环境模型全区域覆盖、基 于环境模型全区域覆盖以及混合方法。
2无环境模型的路径规划 无环境模型的路径规划分为随机全区域覆盖和规 划式全区域覆盖路径规划,规划式全区域覆盖路径规 划方法无需建立环境模型,实际应用很多而且技术成 熟,一般包括往返式“梳”字型路径规划和内螺旋式 “回”字型路径规划 J。往返式路径规划如图1所示, 往返式路径规划的清扫规则为:首先,将清洁机器人放 置在室内的某一角落;然后,沿某一方向行进;遇到障 碍物后采取避障策略,碰到墙壁则移一个车身转弯掉 头继续行进,如此来回运动以达到遍历整个环境。 文献[5]实现了在避障策略下基于往返式的全区 域覆盖路径规划,并用先绕行环境一周,接着以环境的
最小跨度为行走方向的改进方法,这样可以降低能量 消耗。
l I: - I l l l II :
I : 。I I 图1往返式路径规划 内螺旋路径规划即让机器人沿着墙壁的边界移 动,遇到障碍物则沿边移动或采取避障策略,进行 “回”字型移动,最后到达环境的中心点,但是相比于 “梳”字型路径,“回”字型路径存在一个难题,由于没 有明显的转折点,必须给机器人一个标志,让它知道何 时进人下个内圈行进。无环境模型的路径规划由于在 实际应用中设计简单、控制方便,在简单的清扫环境 下,采取该方法能取得高效的回报。
3 基于环境模型的路径规划 要让清洁机器人达到高质量的遍历环境效果,必 须建立环境模型,而创建环境地图是建立环境模型最 常用且有效的方法。目前所用到的地图模型大致可以 分为栅格地图、可视图、拓扑地图等,然后在地图的基 础上运用图的遍历技术或者启发式搜索算法获得最优 路径 引。
3.1栅格地图 栅格法是运用最多的构建环境地图方法,即把整 个待覆盖区域平面划分成很多小方格,然后定义几种 标记,分别为未覆盖区域、已覆盖区域、障碍物区域等, 并给每个小方格标上一种标记,通过这种对环境的离 散化处理,可以将抽象的环境信息转为具体的数值。 这种建立环境模型的方法简单,易于实现,但是如果要 达到精确的环境地图或者遇到复杂的环境必须消耗大 量的存储空间,而且也会降低搜索效率。基于栅格地 图的路径规划方法被广泛地研究,包括通过改进栅格 的研究和优化搜索算法的研究。 3.1.1四叉树分解法 四叉树分解法是对栅格地图的一种改进,研究者 利用四叉树对环境信息建模,可以高效地对环境信息 进行压缩,使遍历区域更加清晰,降低路径规划问题的