全方位轮式移动机器人控制器设计与实现
- 格式:pdf
- 大小:120.02 KB
- 文档页数:4
轮式移动机器人的结构设计摘要:随着机器人技术在外星探索、野外考察、军事、安全等全新的领域得到日益广泛的采用,机器人技术由室内走向室外,由固定、人工的环境走向移动、非人工的环境。
本课题是机器人设计的基本环节,能够为后续关于机器人的研究提供有价值的平台参考和有用的思路。
本文介绍了已有的机器人移动平台的发展现状和趋势,分析操作手臂常用的结构和工作原理,根据选定的方案对带有机械臂的全方位移动机器人进行本体设计,包括全方位车轮旋转机构的设计、车轮转向机构的设计和机器人操作臂的设计。
要求全方位移动机构转向、移动灵活,可以快速、有效的到达指定地点;机械臂操作范围广、运动灵活、结构简单紧凑且尺寸小,可以快速、准确的完成指定工作。
设计完成后要分析全方位移动机构的性能,为后续的研究提供可靠的参考和依据。
关键字:机器人移动平台操作臂简单快速准确Structure design of wheeled mobile robots Abstract:with the robot technology in an alien exploration, field survey, military and security new areas to be increasingly widely adopted, robot technology by indoor, outdoor by fixed, to move towards artificial environment, the artificial environment. This topic is the basic link, robot design for the follow-up about robots can provide valuable reference and useful ideas platform.This article summarizes the existing robot mobile platform development status and trends of operating the arm structure and principle of common, According to the selected scheme of mechanical arm with ontology omni-directional mobile robots designed, including the design of all-round wheel rotating mechanism, wheel steering mechanism of design and the design of robot manipulator. Request to change direction, move the omni-directional mobile institution, can quickly and effectively flexible the reaches the specified location; Mechanical arm operation scope, sports flexible, simple and compact structure and size is small, can quickly and accurately completed tasks. The design is completed to analyze the performance of the omni-directional mobile institutions for subsequent research, provide reliable reference and basis.Keywords: Robot mobile platform manipulator simple accurate and quick目录1.绪论1.1引言(1)1.2国内外相关领域的研究现状(1)1.3主要研究内容(5)2.全向移动机器人移动结构设计2.1引言(5)2.2机械设计的基本要求(6)2.3全方位轮式移动机构的设计(6)2.3.1移动机器人车轮旋转机构设计(7)2.3.2移动机器人转向机构设计(10)2.3.3电机的选型与计算(12)2.4移动机器人车体机构设计(15)2.5本章小结(16)3.机械手臂的设计3.1末端执行器的设计(16)3.1.1末端执行器的设计要求(17)3.1.2末端执行器的设计(17)3.1.3电机的选型与计算(20)3.2机械手臂杆件的设计(21)3.2.1腕部结构设计(21)3.2.2臂部结构设计(21)3.2.3机械臂电机的选型与计算(23)3.3本章小结(23)4.机械材料的选择和零件的校核4.1机械材料的选用原则(24)4.2零件材料选择和强度校核(25)4.3本章小结(29)参考文献(30)致谢(31)附录1 绪论1.1 引言移动机器人已经成为机器人研究领域的一个重要分支。
0引言世界技能大赛由世界技能组织举办,被誉为“技能奥林匹克”,是世界技能组织成员展示和交流职业技能的重要平台,比赛项目共分为6个大类,分别为结构与建筑技术、创意艺术和时尚、信息与通信技术、制造与工程技术、社会与个人服务、运输与物流。
移动机器人项目属于制造与工程技术领域的赛事之一,随着制造业的转型升级,技能人才的培养也扮演着越来越重要的角色,为了更好地推广移动机器人项目,让更多的院校参与世界技能大赛,让更多的学生学会利用自动控制技术设计世界技能大赛所需的移动机器人,笔者将几年来对移动机器人电机控制、运动规划方面的一些技巧及实现做了总结,旨在让更多的参与者快速学会对移动机器人的控制,更好地推动移动机器人相关专业的发展。
1系统组成1.1系统基本构成世界技能大赛移动机器人项目一般要求参赛队伍所制作的移动机器人具有较为灵活的移动能力,为了满足这一条件,普遍采用全方位移动的机器人设计。
全方位移动机器人具有全方位运动能力,其实现方式关键在于全方位的轮系结构,该结构具备每一个大轮边缘套有小轮的机构,能够避免普通轮系不能侧滑带来的非完整性运动限制,从而实现全方位运动。
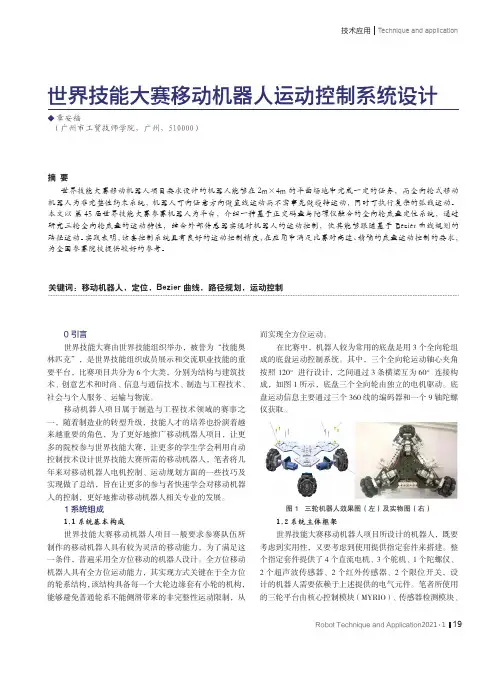
在比赛中,机器人较为常用的底盘是用 3 个全向轮组成的底盘运动控制系统。
其中,三个全向轮运动轴心夹角按照 120°进行设计,之间通过3条横梁互为60°连接构成,如图1所示,底盘三个全向轮由独立的电机驱动。
底盘运动信息主要通过三个360线的编码器和一个9轴陀螺仪获取。
图1 三轮机器人效果图(左)及实物图(右)1.2系统主体框架世界技能大赛移动机器人项目所设计的机器人,既要考虑到实用性,又要考虑到使用提供指定套件来搭建。
整个指定套件提供了4个直流电机、3个舵机、1个陀螺仪、2个超声波传感器、2个红外传感器、2个限位开关,设计的机器人需要依赖于上述提供的电气元件。
笔者所使用的三轮平台由核心控制模块(MYRIO)、传感器检测模块、世界技能大赛移动机器人运动控制系统设计 章安福(广州市工贸技师学院,广州,510000)摘 要世界技能大赛移动机器人项目要求设计的机器人能够在2m×4m的平面场地中完成一定的任务,而全向轮式移动机器人为非完整性约束系统,机器人可向任意方向做直线运动而不需事先做旋转运动,同时可执行复杂的弧线运动。

全向轮移动机器人的设计和控制050308225 Alex.Wang摘要这篇论文介绍一个全向移动机器人作为教育学习。
由于它的全向轮设计,这种机器人拥有有各个方向移动的能力。
这篇论文主要提供了一些关于常用的和特殊的车轮设计,以及全向轮机械设计方面和电子控制方法:远程控制、自动导航寻迹和自动控制的方法。
1、引言移动机器人在工业和技术方面应用的重要性正在日益的增加,在无人监控值守、检查作业、运输运送领域已经得到了广泛的应用。
一个更加紧俏的市场是移动娱乐机器人的开发。
作为一个全自动的移动机器人,其中一个主要的应用需求是它的空间移动能力,同时能够避免障碍物并且发现去下一站的路径。
为了能实现这种任务,能够引导机器人移动的功能如定位、导航必须为机器人提供他当前位置信息,这就意味着,它要借助于多个传感器,外部的状态参考和算法。
为实现移动机器人能够在狭窄的区域移动并且避开障碍物,必须具备良好的移动性能并得到正确而巧妙的引导,这些能力主要取决于车轮的设计。
关于这方面的研究正在持续不断的进行,以改善移动机器人系统的自动导航能力。
本篇论文介绍一种全方向的移动机器人作为教育之用。
采用特殊的Mecanum轮设计,使这种机器人拥有全部方向的移动能力。
论文目前提供一些关于传统的和特殊的车轮设计、机械结构设计以及电路和控制方法、远程遥控、线性跟踪(LINE FOLLOW)、自动控制方面的信息。
由于这种机器人的移动能力和它各种控制方法的多样选择性,本章中讨论的机器人可以作为一个非常有趣的教育性平台。
这篇论文是一项在Robotics Laboratory of the Mechanical Engineering Faculty, ”Gh. Asachi” Iasi理工大学研究成果的总结报告。
2、全方向移动能力“全方向”这个术语是用来描述一个系统在任意的环境结构中立刻向某一方向移动的能力。
机器人型运动装置通常是为在平坦的平面上移动而设计的,运行在仓库地面、路面、LAKE、桌面等。
《轮式移动机器人轨迹跟踪智能控制》篇一一、引言随着科技的不断进步,轮式移动机器人在各个领域的应用越来越广泛,如工业自动化、军事侦察、服务机器人等。
在这些应用中,轨迹跟踪的准确性和智能性成为评价机器人性能的重要指标。
本文旨在研究轮式移动机器人轨迹跟踪的智能控制技术,探讨其应用与优势,并提出相应的解决方案。
二、轮式移动机器人概述轮式移动机器人是一种常见的移动机器人类型,具有结构简单、移动灵活、运动速度快等优点。
其运动主要依靠电机驱动的轮子实现。
根据不同的需求,轮式移动机器人可分为单轮驱动、双轮驱动等不同类型。
此外,其内部控制系统也是机器人正常运行的关键。
三、轨迹跟踪的挑战与需求轨迹跟踪是轮式移动机器人的核心功能之一。
然而,在实际应用中,轨迹跟踪面临诸多挑战。
如复杂的外部环境和内部分布式控制系统可能导致机器人轨迹偏离设定路线,使得任务无法准确完成。
因此,我们提出了一个高质量的轨迹跟踪智能控制方案,以解决这些问题。
四、智能控制方案的设计与实现为了实现准确的轨迹跟踪,我们采用了先进的传感器技术和机器学习算法。
首先,通过高精度的传感器实时获取机器人的位置和姿态信息。
然后,利用机器学习算法对数据进行处理和分析,以实现智能决策和控制。
具体来说,我们采用了以下步骤:1. 传感器数据采集:通过激光雷达、摄像头等传感器实时获取环境信息,包括障碍物位置、道路情况等。
2. 路径规划:根据获取的传感器数据,利用算法进行路径规划,为机器人制定合理的运动路线。
3. 反馈控制:将实际位置与目标轨迹进行比较,计算偏差并进行反馈控制,调整电机的输出力矩以使机器人回到正确的轨迹上。
4. 机器学习:利用深度学习等算法对历史数据进行学习,以提高轨迹跟踪的准确性和鲁棒性。
五、实验结果与分析为了验证我们的智能控制方案的有效性,我们在不同环境下进行了实验。
实验结果表明,我们的方案在各种复杂环境下均能实现准确的轨迹跟踪。
此外,我们还对不同算法进行了对比分析,发现我们的方案在准确性和鲁棒性方面均具有显著优势。
《新型轮腿式机器人的设计与仿真》篇一一、引言随着科技的进步与智能化需求的增加,机器人技术逐渐发展出新型的设计形态。
其中,轮腿式机器人因其灵活性和适应性强的特点,受到了广泛关注。
本文将详细介绍新型轮腿式机器人的设计思路和仿真结果,旨在为相关研究提供参考。
二、新型轮腿式机器人设计背景及意义传统机器人主要依靠轮式或腿式运动结构,但随着应用场景的不断扩大,单一结构的局限性逐渐凸显。
而轮腿式机器人将轮和腿两种结构有机结合,使机器人具备了在不同地形环境下自由移动的能力。
新型轮腿式机器人的设计具有以下意义:1. 提高机器人的环境适应性;2. 拓宽机器人的应用领域;3. 推动机器人技术的进一步发展。
三、设计思路与原理新型轮腿式机器人设计主要遵循以下思路:1. 结构设计:结合轮式和腿式的优点,设计出具有自适应能力的轮腿结构。
通过分析不同地形条件下的运动需求,确定机器人的整体结构和各部分功能。
2. 动力系统设计:采用高效、低能耗的驱动系统,确保机器人在各种环境下的运动性能。
同时,考虑机器人的负载能力和运动速度,优化动力系统设计。
3. 控制策略:采用先进的控制算法,实现机器人的自主导航、路径规划和避障等功能。
通过仿真验证控制策略的有效性,确保机器人在实际运行中的稳定性和可靠性。
四、具体设计与实现1. 结构设计:新型轮腿式机器人采用模块化设计,包括轮式结构、腿式结构和控制系统等部分。
其中,轮式结构用于平坦地面运动,腿式结构用于复杂地形环境。
通过调整轮腿结构的比例和材料,实现机器人的轻量化和高强度。
2. 动力系统:采用电动驱动系统,包括电机、电池和传动装置等部分。
电机选用高效、低能耗的直流无刷电机,电池选用大容量、长寿命的锂离子电池。
传动装置采用齿轮和皮带等传动方式,确保动力传递的稳定性和可靠性。
3. 控制策略:采用基于传感器和算法的控制策略,实现机器人的自主导航、路径规划和避障等功能。
通过分析环境信息,机器人能够自主判断运动方向和速度,以适应不同地形和环境。
轮式可移动讲台机器人的研究与实践作者:王畅来源:《消费电子·理论版》2014年第01期摘要:此种轮式可移动讲台机器人集笔记本电脑、投影仪音响设备、摄像头、指纹签到、语音识别、可升降机构、可伸缩驱动轮机构等多种模块于一身。
它不仅拥有普通讲台搭载电脑和多媒体设备的基本功能,更集成了指纹签到、语音交互、视频监控、升降伸缩和智能可记忆行走,授课信息显示等功能,全方位的解决日常教学中遇见的各种问题。
关键词:可移动轮式机器人;指纹签到;语音交互;视频监控;升降伸缩;智能可记忆行走;授课信息显示中图分类号:TP242.6 文献标识码:A 文章编号:1674-7712 (2014) 02-0000-01随着科技发展和社会进步,智能化的设备已经慢慢渗透在人们生活的方方面面。
特别是机器人技术和嵌入式技术正在以超常的速度普及和推广。
然而,给学生普及科学知识的教学设备反而越来越显得跟不上时代。
目前已经公布的技术中,涉及到升降讲台的也有几种,不过大多创新重点在于机械结构,并未涉及多功能的电子嵌入式系统。
即便是有可移动装置,也只是简单的轮式驱动。
我们本次的设计就是针对上述问题,提出了一种轮式可移动讲台机器人。
一、轮式可移动讲台机器人及其指导思想本实用新型为一种多功能的轮式可移动讲台机器人。
笔记本电脑运行上位机程序,单片机(意法半导体公司的STM32)中运行嵌入式程序。
单片机和笔记本电脑通过RS232串口通讯。
轮式可移动讲台机器人的功能模块主要概括为语音识别、指纹签到、音响功放、投影仪、摄像头监控、主讲台面板升降、可伸缩双轮机构、惯性导航、指纹签到模块和微型投影仪伸缩机构。
此种轮式机器人克服传统讲台功能单一,体积庞大的缺点,将指纹签到、语音对话、云台摄像头监控、可升降支架、可伸缩驱动轮等技术与传统讲台有机结合,组成了多功能带有智能控制功能的讲台机器人。
真正的实现了科技服务于教育,教育产生科技。
对比于已经公布的技术,该轮式机器人并不局限于讲台的结构创新,而是着重将创新点定位在机器人和嵌入式技术与传统讲台的融合,将机器人机电控制技术、导航技术、指纹签到技术、非特定语音识别技术有机结合。
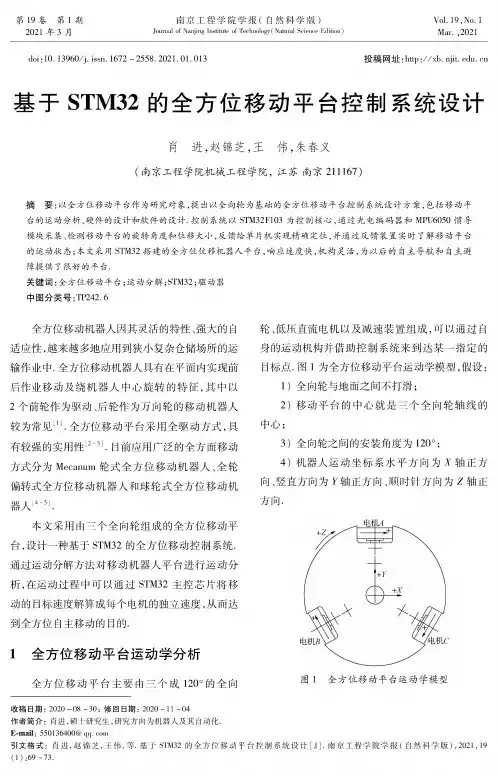
第19卷第1期 南京工程学院学报(自然科学版)V 〇L 19,N 〇.l2021 $ 3 月Journal of Nanjing Institute of Technology ! Natural Science Edition )Mar. ,2021doi:10. 13960/j. issn. 1672 -2558.2021.01.013投稿网址:http://x b. n j i t . edu. cn基于STM 32的全方位移动平台控制系统设计肖进,赵锦芝,王伟,朱春义(南京工程学院机械工程学院,江苏南京211167)摘要:以全方位移动平台作为研究对象,提出以全向轮为基础的全方位移动平台控制系统设计方案,包括移动平台的运动分析、硬件的设计和软件的设计.控制系统以S T M 32F 103为控制核心,通过光电编码器和M P U 6050惯导 模块采集、检测移动平台的旋转角度和位移大小,反馈给单片机实现精确定位,并通过反馈装置实时了解移动平台 的运动状态;本文采用S T M 32搭建的全方位位移机器人平台,响应速度快,机构灵活,为以后的自主导航和自主避障提供了很好的平台.关键词:全方位移动平台;运动分解;S T M 32;驱动器 中图分类号:T P 42.6全方位移动机器人因其灵活的特性、强大的自 适应性,越来越多地应用到狭小复杂仓储场所的运 输作业中.全方位移动机器人具有在平面内实现前 后作业移动及绕机器人中心旋转的特征,其中以 2个前轮作为驱动、后轮作为万向轮的移动机器人 较为常见[1].全方位移动平台采用全驱动方式,具 有较强的实用性目前应用广泛的全方面移动 方式分为M e c a n u m 轮式全方位移动机器人、全轮 偏转式全方位移动机器人和球轮式全方位移动机 器人[4 — 5].本文采用由三个全向轮组成的全方位移动平 台,设计一种基于S T M 32的全方位移动控制系统. 通过运动分解方法对移动机器人平台进行运动分 析,在运动过程中可以通过S T M 32主控芯片将移 动的目标速度解算成每个电机的独立速度,从而达 到全方位自主移动的目的.1全方位移动平台运动学分析全方位移动平台主要由三个成120°的全向轮、低压直流电机以及减速装置组成,可以通过自 身的运动机构并借助控制系统来到达某一指定的 目标点.图1为全方位移动平台运动学模型,假设(1"全向轮与地面之间不打滑;2"移动平台的中心就是三个全向轮轴线的 中心'3"全向轮之间的安装角度为120°4"机器人运动坐标系水平方向为Z 轴正方 向、竖直方向为F 轴正方向、顺时针方向为Z 轴正 方向.收稿日期:2020 -08 -30;修回日期:2020 -11 -04作者简介:肖进,硕士研究生,研究方向为机器人及其自动化.E-mail : 550136400@qq . com 引文格式:肖进,赵锦芝,王伟,等.基于STM 32的全方位移动平台控制系统设计[J ].南京工程学院学报(自然科学版),2021,19 ! 1 ":69 -73.70南京工程学院学报(自然科学版)2021年3月假设全方位移动平台广义速度为[),),$] 7#各轮的线速度为[),),)]T,电机!电机"、电机C的运动速度分别为)、)、),移动平台Y轴和\轴的速度分别为)和),移动平台的运动中心即为移动平台的原点(乂为电机与运动中心(的距离,$为移动平台Z轴方向的旋转速度.对全方位移动平台在三个方向上的速度进行分解,平移Y方向时,)'0,)= 0,$ = 0,可以得到:)=1 X),)=-cos600X),(1))=-cos60〇x)平移\方向时,)=0,)'0,$=0,可以得到:)=0 X),)= sin60〇X),.(2))=-sin600X)沿着Z轴方向旋转时,)=0,)=0,$'0,可以得到:)=$x*,) = $x*,) = $x* (3)将式(1"、式(2)和式(3"相加可以得到:)=1x)+ 0x)+ $x* ,)=-cos600x)+ sin60〇x)+ $x*| (4))=-cos600x)- sin600x)+ $x将式(4)转化为矩阵形式得:■)-■10*■)_)=-cos600sin600*)(5)_ - cos600-sin600* __ $_对式(E)求逆解可以得到正运动学方程为:)_■2 11 "了-了 - 了■)-)=0 槡槡3 3)(6)$_111_)__3* 3* 3* _由式(1)可知,通过调节三个全向轮电机的转 速及转向,就能达到改变整个全方位移动平台运动 状态的目的,这是进行软、硬件设计的理论基础.将移动平台的运动规律分解,然后将指定的线 速度和角速度根据公式依次分配到每个电机上,即可完成机器人的运动控制.2全方位移动平台控制系统硬件设计2.1控制系统硬件结构设计图2为基于单片机系统设计的全方位移动平 台控制系统的结构框图,处理器为M C U单片机处 理器;信号输入模块(包括蓝牙、按键和串口模块)将运动信号输入到@P U中,@P U直接对驱动器输 出不同位移的信息;传感器模块包括电机尾部的光 电码盘、@Z U6050惯导模块以及A/D转换模块,光 电码盘通过光电切割来计算移动平台位移的速度 和距离,M P U6050惯导模块用来计算移动平台移 动的加速度和旋转的角度,A/X模块将电源的模 拟量转化为数字,0L E X显示屏显示M C U通过传 感器采集的信息;运动模块由驱动芯片和低压直流 电机组成,信号输入模块输入控制信号,M C U根据 运动分解结果分配对应的电压信号到驱动芯片,驱 动芯片驱动直流电机按照指定路径运动.图2全方位移动平台控制系统2.2控制系统芯片选择设计控制系统时,从控制系统的稳定性和性能 多方面综合考虑,拟采用S T M32F103作为控制系 统的主控芯片?S T M32F103是S T(意法半导体)公司推出的 32 位单片机,具有 64 kB S R A M、512 kB F L A S H、8个定时器、3个A D C以及2个IIC,是高可靠、低 消耗、抗干扰的高性能单片机[6],具有48个GPI0接 口,完全符合全方位移动平台GPI0接口的需求.2)电机驱动模块设计全方位移动平台采用的驱动器W S X C2412X 是一*款12 A/24 V双直流有刷电机驱动器,是专门 为低压直流电机设计的,其主要特点是:工作电压第19卷第1期肖进,等(基于STM32的全方位移动平台控制系统设计71低,工作电压只需24 V;输出电流大,可高达12 A;可驱动最高290 W功率的直流电机,内置过电压、欠电压、过热保护电路,支持满占空比输入,双通道 驱动.全方位移动平台有三组电机,采用两组驱动 器即可满足驱动的要求.使用定时器输出三路P W M波,驱动时序如表1所示.以一路电机为例,其驱动器信号输入为(3A置低,I N B置高,输入 P W M波,则功率输出M A为P W M波,M B置低,电机根据输入的P W M波,按照给定速度正转;反之,I N A置高,I N B置低,输入P W M波,则功率输出M B 为P W M波,M A置低,电机根据给定速度反转.表1中H为高电平;L为低电平;X为与电平无关;Z为 高阻抗;P W M为输入的变占空比不变频率的脉宽 调制信号.表1 W S D C2412D驱动时序信入出INA INB PWM MA MB电机状态L L X L L制动L H PWM PWM L正转H L PWM L PWM转H H X Z Z脱机驱动器的主要功能就是根据M C U发出的控 制指令,通过驱动器的控制协议,输出对应的P W M波驱动电机运动.全方位移动平台配有三台电机,用两组驱动器对其进行控制,电机!和 电机"分别接入驱动器1的电机通道1与2,电机C接入驱动器2的电机通道1.以电机B为例,驱动器与电机、控制器、反馈元件的连接简图如图3所示.图3控制系统接线图2)控制器的引脚分配全方位移动平台控制系统的G P I O引脚分配 如表2所示.表2 G P I O引脚分配表GPIO复用接线GPIO复用接线地址會爸址能PB8TIM4__CH4光电r器A相PC0/电机!的动器引INAPB9TIM4__CH3光电r器B相PC1/电机!的动器引INBPB10 I2C2._SCL MPU6050SCL PC3/电机"的动器引INAPB11I2C2__SDA MPU6050SDA PC4/电机"的动器引INB电机!的电机G的PC6TIM8_CH1动器引PC5/动器引PWM INA电机"的电机G的PC7TIM8_CH2动器引PC6/动器引PWM电机G的INBPC8TIM8_CH3动器引PWM3全方位移动平台控制系统软件设计3.1软件控制流程软件的总体控制流程如图4所示,首先初始化片内资源,启动接收任务,等待外部的指令,外部指 令可以通过串口模块或者蓝牙模块传递,接收到指 令后解析该指令,并将解析后的内容发送给电机模 块,根据运动分解和P I D算法,完成电机速度的运 算,同时不断地读取电机的状态和速度,反馈给 M C U,并启动O L E D显示模块,监控移动平台的状 态及各个电机的位置和速度.该控制系统所采用的 芯片S T M32F103单片机最高晶振为72 M H z,利用 定时器的输出比较模式产生占空比可变的P W M 波来控制电机的速度,同时通过运动分解将目标速 度分配到每个电机上.在状态反馈方面,M C U通过 定时器的编码器功能来获取移动平台运动的速度 与位移,通过IIC接口连接M P U6050访问其内部72南京工程学院学报(自然科学版)2021年3月的数据寄存器获取移动平台的角度与加速度信息?图4全方位移动平台主控制流程3.2 P I D速度环模型增量式PID算法定义为:1 _ J, )ek1)ek-1_式中:7为第,欠采样输入偏差值;J为比例时间;J为微分时间.电机控制速度环原理图如图E所示,电机采用 速度控制,MCU接收串口模块输入的指令,将机器 人的目标速度作为入口参数,通过式(1)至式(6)进 行运动学分析,计算出每个电机的目标速度,并通过 速度PID控制器,驱动直流电机,直流电机尾部的编 码器捕获电机的速度,将速度反馈给P D控制器,PID 控制器调节PWM波的输出量,从而达到闭环控制?图5 电机控制速度环原理图4调试试验与分析在搭建的全方位移动平台上选择z轴方向作为误差基准,通过多次测量z轴方向的数据求取 整个系统的平均误差,全方位移动平台如图6 所示.图6 图通过Python测试脚本,测量位置为10 m、角度 为0°时的位姿,共采集7组数据,如表3所示,并对数据进行分析,可以得出误差统计图如图7所示.3(组号位Bm实位Bm目标角度/°实Bm位Bm角度误差/°110.00010.0160.0000.1020.0160.102 210.00011.6910.000-0. 105 1.691-0. 105 310.00010.0970.0000.0160.0970.016 410.00010.3010.0000.2560.3010.256 510.0009.7950.000-0. 136-0.205-0. 136 610.0009.7480.0000.235-0.2520.235 710.00010.1780.000-0.2120.178-0.212门□位置误差□角度误差_ 1.5、-1.0 _-0.52 3 4 5 6 7采集数据组图7误差统计图从图7可以看出,除了第二组数据偏差较大 外,其他数据的位置误差均保持在0.5 m之内,角度误差保持在0.3°Z内,试验表明移动平台的精 度较高?5结语本文设计了一种全方位移动平台的运动控制 系统,该系统充分利用了全向轮的全驱动特性,能 够根据输入的指令和MCU的运动分解来完成运动 目标任务,通过光电传感器、MPU6050等传感器可-0.5^-第19卷第1期肖进,等:基于S T M32的全方位移动平台控制系统设计73以清晰地反馈移动平台的旋转角度和位移距离,控 制更加灵活,满足了移动平台对于控制系统的要 求;同时以S T M32作为控制核心,通过与传感器之 间的通信,能够实时了解移动平台自身的状态,实 现了良好的通讯;通过驱动芯片W S D C2412D实现 对低压直流电机的精确控制;最后通过试验测量本 移动平台的定位精度,验证了移动平台具有较高的 定位精度,为后续的移动机器人上层的继续搭建提 供了良好的平台.参考文献:[1] LORIA A,DASDEMIR J,JARQUIN N A.Leader followerformation and tracking control of mobile robots along straightp a t h s)J]•IEEE T r a n s a c t i o n s o n C o n t r o l S y s t e m s T e c h n olog y,2016,24(2) :727 -732.[2]贾茜,汪木兰,刘树青,等.全方位移动机器人研究综述[J].制造业自动化,2015,37(7): 131-134.[3]周卫华,张德发•四轮移动机器人平台的设计与实现[J]•电气自动化,2018,40(5) :10-12.[4 ]付宜利,李寒,徐贺,等.轮式全方位移动机器人几种转向方式的研究[J]•制造业自动化,2005,27(10):33-37.[5]王兴松•Mecnum轮全方位移动机器人技术及其应用[J]•机械制造与自动化,2014,43(3):1-6.[6]胡春旭,熊枭,任慰,等.基于嵌人式系统的室内移动机器人定位与导航[J]•华中科技大学学报(自然科学版),2013,41(S1) :254-257,266.Designof Control Systemof Omnibearing Mobile PlatformBasedonSTM32 XIAO Jin, ZHAOJindhi, WANG Wei, ZHUChun-yi(School of Mechanical Engineering,Nanjing Ins tit ute of Technology,Nanjing211167, China)Abstract:This paper takes omnidirectional mobile platform as a research object, and proposes a design scheme for omnidirectional mobile platform control system based on omnidirectional wheels. Emphasis i s placed on hardware design and software design o f the mobile platform. With STM32F103 as a control core, the research collects and detects the rotation angle and displacement of the mobile platform through a photoelectric encoder navigation module, which i s then fed back t o the single-chip microcomputer t o achieve precise positioning. Understanding of the movement status of the mobile p latform in real time i s obtained by using a feedback device. The omnidirectional displacement robot platform built using STM32 has fast response speed and flexible mechanisplatform for autonomous navigation and autonomous obstacle avoidance in the future.Key words: omnidirectional mobile platform; motion decomposition; STM32; drive。
作业名称:全向轮机构及其控制设计学生姓名:石维亮02001433全向轮机构及其控制设计-Mecanum轮的研究与研制引言直接电流注入法相关背景知识介绍现在,作为移动机器人而开发的移动机构种类已相当繁多,仅就地面移动而言,移动机构就有车轮式、履带式、腿脚式、躯干式等多种形式。
其中全方位轮式移动机构无需车体做出任何转动便可实现任意方向的移动,并且可以原地旋转任意角度,运动非常灵活,可沿平面上任意连续轨迹走到要求的位置。
在此,本文对其中的最具特色的Mecanum全方位轮进行研究并进行轮体的参数及关键零件的设计。
Mecanum全向轮由于设计独特,运动灵活,且运动不受限于所处空间而使其应用范围更为广泛。
1 Mecanum轮的原理与结构1.1 单个辊子的运动原理图1-1Mecanum轮运动参量的定义Mecanum外形像一个斜齿轮,轮齿是能够转动的鼓形辊子,辊子的轴线与轮的轴线成α角度。
这样的特殊结构使得轮体具备了三个自由度:绕轮轴的转动和沿辊子轴线垂线方向的平动和绕辊子与地面接触点的转动。
这样,驱动轮在一个方向上具有主动驱动能力的同时,另外一个方向也具有自由移动(被动移动)的运动特性。
轮子的圆周不是由普通的轮胎组成,而是分布了许多小滚筒,这些滚筒的轴线与轮子的圆周相切,并且滚筒能自由旋转。
当电机驱动车轮旋转时,车轮以普通方式沿着垂直于驱动轴的方向前进,同时车轮周边的辊子沿着其各自的轴线自由旋转。
图1-1为Mecanum轮的各结构和运动参量。
1.2 全方位轮协调运动原理图1-2为采用全方位移动机构的车轮组合情况,轮中的小斜线表示触地辊子的轴线方向。
每个全方位轮都由一台直流电机独立驱动,通过四个全方位轮的转速转向适当组合,可以实现机器人在平面上三自由度的全方位移动。
4个全方位轮组成的机器人底座的力分析如图,其中为轮子滚动时小辊子受到轴向的摩擦力;为小辊子做从动滚动时受到的滚动摩擦力;ω为各轮转动的角速度。
图1-2组合运动图2 Mecanum轮的参数设计假设图2-1中所示的圆柱是全方位轮的理论设计圆柱,曲线AB是轮子滚动时辊子与地面的接触线。
全方位移动机器人模糊PID运动控制研究作者:田琦张国良刘岩来源:《现代电子技术》2009年第05期摘要:通过对足球机器人运动学模型的分析,考虑到系统的时变、非线性、干扰大等特点,以全向移动机器人为研究平台,提出一种将模糊控制与传统PID控制相结合的方法,应用到足球机器人的运动控制系统中。
针对足球机器人运动控制中的重点问题,着重提出了基于模糊控制的PID控制器中三个参数的动态调整方法。
实验表明,该控制器能够很好地改善控制系统对轮速的控制效果。
关键词:移动机器人;运动控制;四轮全向机器人;模糊PID中图分类号:TP273文献标识码:A文章编号:1004-373X(2009)05-131-03Research on Fuzzy PID Motion Control of Omni-directional RobotTIAN Qi,ZHANG Guoliang,LIU Yan(Second Artillery Engineering University,Xi′an,710025,China)Abstract:Through analysing the kinematics model of soccer robot,considering time change,nonlinear and other characteristics of this system,a control method combining fuzzy control with traditional PID control is presented.To contrapose the problems of robot soccer motion system,the methods of dynamically regulate the three PID parameters based on fuzzy control is presented.The improvement of control effect is verified by experimental results.Keywords:mobile robot;motion control;four wheeled omni-directional robot;fuzzy PID0 引言移动机器人是一个集环境感知、动态决策、行为控制与执行等多种功能于一体的综合系统[1],其运动控制是移动机器人领域的一个重要研究方向,也是移动机器人轨迹控制、定位和导航的基础。
毕业设计(论文)报告题目全向轮机构及其控制设计——Mecanum轮的研究与研制机械工程院(系)机械设计制造及其自动化专业学号学生姓名指导教师起讫日期设计地点摘要随着机器人技术的高速发展,机器人已经在我们的生产生活中起了非常重要的作用。
移动机器人中的全方位轮式移动机器人无需车体做出任何转动便可实现任意方向的移动,并且可以原地旋转任意角度,运动非常灵活。
在此,本文根据国际上流行的麦克纳姆(Mecanum)轮设计方法,对麦克纳姆进行参数设计并设计关键零件制作成可全方位移动的机器人,同时分析其运动学及动力学模型,并设计协调控制电路控制其运动。
实验表明麦克纳姆全向移动机构的运动及转位灵活且不受限于运动空间,应用前景非常广阔。
关键字:全方位轮;麦克纳姆轮;移动机器人;全方位移动机器人AbstractWith the development of robotics, robots have played an important part in our production area. The omnidirectional wheeled mobile mechanism of all can move in all direction without any rotation, and can rotate any angle at the original point flexibly. Based on the international design method for mecanum wheel, some parameters are discussed in the paper, and many key components are designed to make into an omnidirectional mobile robot. Also its kinematical and dynamical model is analyzed, and the control circuit is made out to correspond to the motion. Experiments indicated that mecanum the omnidirectional wheeled mobile mechanism moves and rotates smartly without limits to the space, so a widen application future can be expected.Keywords: omnidirectional wheel; mecanum wheel; mobile robot; omnidirectional mobile robot目录摘要 (I)Abstract (II)序言 (1)第一章全方位移动机构的介绍 (2)第二章麦克纳姆轮的原理及结构 (3)2.1单个轮体运动原理 (3)2.2全方位轮协调运动原理 (3)第三章麦克纳姆轮参数设计 (5)3.1辊子的几何参数的公式推导 (5)3.2辊子的几何参数的设计计算 (9)第四章三维造型与零件加工 (11)4.1辊子的设计加工 (11)4.2辊子的安装轮毂的设计加工 (11)4.3全向移动机器人的总体设计及装配 (12)第五章运动学模型分析 (13)5.1坐标系的建立 (13)5.2轮体的雅可比矩阵 (14)5.3复合方程 (16)5.4运动学逆问题的解 (16)5.5运动学正问题的解 (17)第六章动力学模型分析 (19)6.1复合系统在固定坐标系中的加速度 (19)6.2加速度能的计算 (21)6.3全方位移动机构的动力学方程 (22)第七章四轮协调的控制测试电路 (25)7.1 控制电路的方案选择 (25)7.2 控制电路的设计 (25)7.2.1遥控部分的设计 (25)7.2.2 电机调速设计 (26)7.2.3 驱动电路的设计 (27)第八章研究总结与前景展望 (29)鸣谢 (30)参考文献(References) (31)附录序言随着电子通信与机电控制等技术的高速发展,人们已经开始并不断的尝试将智能机器或机器人以及高效率的工具引入我们工业的各个领域。
火电厂智能轮式巡检机器人全局路径规划设计与实现目录一、内容概览 (2)1.1 背景与意义 (3)1.2 国内外研究现状及发展趋势 (4)二、相关理论与技术 (5)2.1 智能控制理论 (7)2.2 优化算法 (8)2.3 传感器与通信技术 (9)三、火电厂智能轮式巡检机器人全局路径规划设计 (11)3.1 设计目标与要求 (12)3.2 路径规划策略 (13)3.3 路径优化方法 (14)四、火电厂智能轮式巡检机器人全局路径规划实现 (15)4.1 系统硬件组成 (17)4.2 系统软件架构 (18)4.3 实现过程中的关键技术问题 (19)五、实验验证与分析 (20)5.1 实验环境与设备配置 (21)5.2 实验过程与结果 (21)5.3 结果分析与讨论 (23)六、结论与展望 (24)6.1 主要成果与创新点 (25)6.2 不足之处与改进方向 (26)6.3 未来发展趋势与应用前景 (28)一、内容概览引言:简要介绍火电厂的重要性和智能巡检机器人的应用背景,阐述全局路径规划在机器人巡检中的关键作用。
系统需求分析:详细分析火电厂智能巡检机器人在路径规划方面需要满足的功能和性能要求,如高精度导航、高效避障、适应复杂环境等。
路径规划算法选择:根据系统需求分析结果,选择合适的路径规划算法,如A算法、遗传算法、粒子群算法等,并解释其适用性。
遗传算法设计与实现:详细介绍基于遗传算法的全局路径规划算法的设计与实现过程,包括编码、选择、变异、交叉等操作步骤。
A算法实现与优化:对比分析A算法与遗传算法的性能优劣,选择A算法作为基础进行优化,提出改进措施,如启发式函数改进、权重系数调整等。
机器人控制策略设计:阐述如何将规划好的全局路径映射到实际机器人控制系统中,确保机器人能够准确、高效地沿着路径行驶。
实验验证与分析:通过仿真实验和实际现场测试,验证所设计路径规划算法的有效性和实时性,分析实验结果并总结不足之处。
电子技术• Electronic Technology68 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】两轮自平衡机器人 控制系统 设计两轮自平衡机器人的控制系统是实现两轮自平衡机器人的移动过程中保持平衡的关键系统,也是两轮自平衡机器人实现功能拓展与增加的基础与前提。
1 两轮自平衡机器人概述两轮自平衡机器人控制系统设计与实现文/刘静 肖家宝 王晓 钱雯两轮自平衡机器人是移动式机器人的一个重要分支,在近些年来实现了快速的发展突破,由于其在控制性、生产经济性、功能拓展性等方面都较其他的轮式机器人有较为明显的优势,因而一度成为轮式机器人控制研究领域的热点研究论题。
两轮式自平衡机器人的物理结构由两个车轮与机器人机身组成,车轮一般是由直流轮式电机与加装的功能及控制部件组成,机身多为连接两个车轮的长方体结构,机身下板固定安装机器人的控制系统及电池等电路设备,上板一般可以安装一些拓展性的功能模块,在机器人的行走移动功能的基础上再进行一定的功能拓展,使其具有更加丰富的功能,以拓展两轮自平衡机器人的适用范围与实用性。
两轮自平衡机器人的双轮结构决定了其的不稳定平衡性,在静止状态下将自平衡机器人放置在水平的地面上,机器人机身将向前或向后倾倒,无法实现机身平面的平衡,因此必须要通过机器人的平衡控制系统对两个车轮进行协调控制,以实现机器人机身的平衡。
2 自平衡机器人的平衡控制机理两轮自平衡机器人的机身平衡控制系统多为以单片机为计算系统的集成电路控制系统,通过安装在车轮位置的姿态传感器测量机身的倾斜角度,然后通过控制电路内核的单片机使用相应的算法对控制车轮转动的伺服电机输出相应的控制信号,进而使轮式电机产生与之对应的扭矩,从而实现机身的平衡。
自平衡机器人在控制系统不工作的状态下无法实现机身的平衡,因此机身会向前或向后倾倒,根据倾倒的方向与倾倒角度的大小判断机身的位置状态。
北京科技大学硕士学位研究生选题报告及文献综述论文题目:单球轮移动机器人控制器的设计与实现2013年09月18日目录1 课题来源、研究的目的及意义 (1)1.1 课题来源 (1)1.2 课题研究目的及意义 (1)2 文献综述 (3)2.1 单球轮移动机器人的研究背景 (3)2.2 单球轮移动机器人的发展现状 (7)2.2.1 国外单球轮移动机器人发展现状 (7)2.2.2 国内单球轮移动机器人发展现状 (24)3 课题研究 (26)3.1 课题研究内容与目标 (26)3.1.1 机器人动力学模型的建立 (26)3.1.2 单球轮移动机器人控制算法的研究 (26)3.1.3 控制器硬件系统研究 (28)3.1.4 嵌入式控制系统研究 (31)3.1.5 控制软件的研究 (34)3.1.6 系统研究目标 (36)3.2 关键问题、难点与创新 (37)3.2.1 单球轮移动机器人关键问题与难点 (37)3.2.2 课题创新点 (37)3.3 研究方法及实验方案 (38)4 进度安排 (39)参考文献 (40)北京科技大学硕士学位研究生选题报告及文献综述1 课题来源、研究的目的及意义单球轮移动机器人是一种全新概念的移动机器人,可以在单一的球形驱动轮上达到动态稳定,并且能够通过球形驱动轮灵活、全方位的进行移动,是一种具有动态稳定性的移动机器人[1,2]。
1.1 课题来源本课题主要研究的是单球轮移动机器人控制器的设计与实现,来源于导师孙昌国副教授近年对国外单球轮移动机器人领域的研究。
1.2 课题研究目的及意义移动机器人按移动机构划分主要有轮式、履带式、腿式、蛇形式、跳跃式和复合式[1]。
不同驱动形式的移动机器人根据各自的特点都有各自相应的应用场合,其中履带式机器人由于接地压力小的特点,在松软的地面附着性能和通过性能好,适用于爬楼梯、越障;腿式机器人可以满足某些特殊的性能,能适应复杂的地形;蛇形式和跳跃式机器人一般在复杂环境、特殊环境和机动性等方面具有其独特的优越性。
第25卷第2期系统工程与电子技术Systems Engineering and E lectronicsV ol 125,N o 122003收稿日期:2001-12-04 修订日期:2002-04-15作者简介:杨福广(1974-),男,硕士研究生,工程师,主要研究方向为机器人控制。
文章编号:10012506X (2003)022*******全方位轮式移动机器人控制器设计与实现杨福广1,周风余1,侯宏光2(1.山东科技大学机器人研究中心,山东济南250031;2.海军潜艇学院,山东青岛266071)摘 要:全面介绍了一种全方位移动机器人的控制系统体系结构及软件的控制策略,包括采用的超声和激光传感器系统、网络化无线通讯系统、基于上下位机的计算机控制系统等方面。
重点介绍了基于LM628的系统的伺服控制方法,并给出了机器人运动实验的结果,证明了系统的可行性。
该系统适合在非结构化动态环境中进行分布式多Agnet (智能体)、多机器人的协作与协调、移动机器人路径规划与避碰等研究。
关键词:移动机器人;控制器;传感器中图分类号:TP24 文献标识码:ADesign and R ealization of the Controller for the Mobile R obot With Full MobilityY ANG Fu 2guang 1,ZH OU Feng 2yu 1,H OU H ong 2guang 2(1.Shandong University o f Science &Technology ,Jinan 250031,China ; 2.Navy Submarine Academy ,Qingdao 266071,China )Abstract :T he system con figuration of hardware and control strategy for rob ot with full m obility is introduced.T he sens or system including ultras onic and laser ,wireless communication system using netw ork and the control system based on master 2slave com puter are presented.T he serv o control meth od that based on LM628is introduced and the result which proves the feasibility is given.T his system is adapted to study distributed muti 2agent ,the cooperation and harm ony of muti 2rob ot ,path plan and obstacle av oidance of m obile rob ot in n one con figuration dynamic circumstance.K eyw ords :M obile rob ot ;C ontroller ;Sens or1 引 言近年来随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多。
轮式移动机器人(W MR )可以作为各种智能控制方法(包括动态避障、群体协作策略)的良好载体,同时又可以方便地构成网络化的分布式系统,开展多智能体的调度、规划等研究,所以对它的研究越来越受到重视。
本文全面介绍了一种全方位移动机器人的控制系统体系结构,包括传感器、通讯、伺服控制系统等,并给出了实验结果,证明了系统的可行性。
2 移动机器人的计算机控制系统的硬件结构及工作原理 由于机器人不断移动的需要,系统采用充电电池供电。
机器人硬件平台由两台工业PC 机、一块由LM628构成的伺服板、三个PW M 放大器和直流伺服电机组成。
其结构框图如图1所示。
系统可以分成以下四个模块:监控模块、感知模块、路径规化和逆运动学计算模块、执行模块。
(1)监控模块该模块的功能通过监控计算机来实现,在Win98下用Visual C ++6.0开发,主要功能包括:①任务描述 利用操作者规定的语言,描述对机器人的控制任务。
②监控指令输入 在机器人完成任务的过程当中,操作者根据任务的执行情况以及环境的状况,对系统进行适当的干预,以充分发挥人的智能,构成人-机合作系统。
如遇到不可避开的障碍、或者多个机器人运动过程中发生死锁等意外情况,都需要操作者适时的干预。
③文本和图形的显示界面 以文本或者图形的方式实时地显示机器人系统的工作信息,包括当前正在执行的任务,机器人的位置、速度、障碍物等环境信息。
监控计算机是通过无线网络与每一个移动机器人取得联系的。
(2)感知模块传感器作为机器人的感知部分,是机器人具有自主能力的重要前提条件。
在W MR 系统中,共有三种传感器:超声、激光和增量式光电码盘。
W MR 上安装的8个超声传感器用来探测周围2m 内的障碍物信息。
激光传感器结合路标用来提供机器人在工作环境中的全局的位置信息。
这两种传感器的信号通过2#计算机的实时处理(处理周期为200ms )形成位置和障碍物的信息,然后通过并行口将信息发送给1#计算机。
另外,每个电机上装有增量式光电码盘,除了用来实现轴空间的位置闭环,还可以通过对轮子码盘值做差分并积分的方法得到忽略轮子滑动的里程计。
(3)路径规划以及运动学求解、轨迹插补模块此模块的硬件平台是1#计算机,软件平台是实时多任务操作系统QNX 。
采用QNX 避免了基于DOS 或WI NDOWS 环境下产生的任务死锁、混乱及多任务调试困难等缺点,它是整个移动机器人的核心。
规划层的任务是接受监控计算机的总体任务,然后根据传感器提供的W MR 的状态信息和障碍物信息进行世界坐标系中的总体任务规划,以固定的时间节拍(100ms )进行世界坐标系中的任务插补,向伺服层提出下一个100ms W MR 在世界坐标系中描述的任务ΔX 、ΔY 、ΔΨ,然后通过世界—机器人坐标系的转换以及逆运动学求解,得到关节空间100ms 的任务,并在关节空间,进行周期为10ms 的直线插补,得到每10ms 关节空间的任务。
最后规划层根据10ms 的关节空间任务做出速度梯形图,得到这个周期中的速度、加(减)速度的值。
(4)执行模块传统的分级式控制器一般都采用通用微机或以单片机作为下位机来实现位置控制,外围电路复杂,计算速度慢,上位机和下位机同步困难,从而导致控制精度不够理想。
在此系统中我们采用了National Semiconductor 公司的智能化专用控制芯片LM628来构成伺服控制系统的核心———伺服板(通过IS A 总线与PC 接口),它适用于由正交增量式光电编码器提供位置反馈的交直流伺服控制系统,能完成高性能数字运动控制中的实时计算工作。
在QNX 下用Watcom C/C ++编写LM628的驱动程序。
LM628的功能原理图如图2所示。
主要性能和特点如下:(1)具有32位的位置、速度、加速度寄存器;(2)具有8位并行异步主计算机接口;(3)有实时可编程的主机中断;(4)具有16位系数的动态可编程改变的数字PI D 参数;(5)运动中可以改变速度、目标位置;(6)可实现位置闭环和速度闭环两种工作方式;(7)具有梯形速度图规划生成器;(8)具有8位或者12位的D/A 输出;(9)带有索引脉冲(Z 脉冲)的正交增量式码盘接口;(10)运行在6MH z 的时钟频率。
本系统中的伺服控制器共有三个LM628组成,实现位置闭环控制。
PW M 放大器和测速机实现速度闭环,PW M 放大器内部实现电流闭环。
系统的控制策略的结构图如图3所示。
每间隔10ms 1#计算机通过IS A 总线把规划的关节空间的位移、速度、加速度送到LM628的接口寄存器中。
LM628在接到1#计算机的任务后按照设定的控制方式(P 、PI 、PI D )完成位置闭环控制。
每341μs 进行一次位置、速度的检查,如果未达到指定的位置或速度,则继续运动或者加速,将达到位置时会自动地按照设定的加速度进行减速。
最终作到关节空间的位置闭环。
这不但克服了一般的单片机的运算速度慢,精度低的问题,也使1#计算机能够有更多的时间处理其他的任务。
规划与计算模块每10ms 读一次码盘值,并与上一次的码盘值做差分,然后除以10ms ,这样可以得到在这个10ms 当中轮子的平均速度,把这个平均速度积分后经过机器人—世界坐标系的转换,就得到了W MR 在世界坐标系中的位置信息(忽略轮子与地面的相对滑动)。
在执行层设计了两个保护:(1)如果规划后的最大速度超过了系统设定的最大速度(属于意外情况),那么规划层将产生报警信号,并同时通过使能操作禁止LM628的信号输出从而使W MR 停止运动;(2)如果某一路规划的码盘值与实际返回的码盘值相差2000码(电机的半转),认为有轮子遇到障碍堵转,禁止LM628的输出使W MR 停止运动,同时产生报警信号。
3 实 验在实验过程中,反馈量是根据码盘值通过逆运动学运算得到的,读取码盘值的时间间隔是10ms ,图像是离线后根据实验数据绘制的。
在本系统中,使用的码盘为4000码/转,・112・第2期全方位轮式移动机器人控制器设计与实现齿轮的传动比为15:1,W MR 轮子半径为60mm ,因此这个系统的控制精度为2πR/(4000×15)=0.00628mm 实验1 初始时W MR 的坐标系与世界坐标系重合,让W MR 先逆时针转动360°,转动的最大速度为9°/s ,加速时间100ms ,运动的时间为42.1s 。
然后顺时针转动360°,转动的最大速度为15°/s ,加速时间为200ms ,运动的时间为25.5s 。
得到的实验图像见图4~图7。
图4 W MR 的转角随时间的变化关系 图5 反馈的角速度 图4是W MR 的转角随时间的变化关系。
在反馈的角度中,最大值为360.003°,最小值为-0.0029°,反映了系统的静态误差很小。
图5是反馈的角速度。
图6是规划的角度与实际转过的角度的差与时间的关系,它反映了系统的动态的性能。
由图可见在运动的过程中,规划的角度要比实际转过的角度大,但在任务结束时,规划的角度与实际的角度的差很小。
在运动过程中,如要求的速度越大,则这个角度差越大。
图7是在W MR 的转动过程中的中心的位置,可见W MR 的中心出现了偏移(理想情况下应该在坐标原点),但这个偏移在各个方向上基本相同且很小,最大值的绝对值小于0.04mm 。