基于Android的小型移动机器人控制系统_王志凌
- 格式:pdf
- 大小:1.11 MB
- 文档页数:4
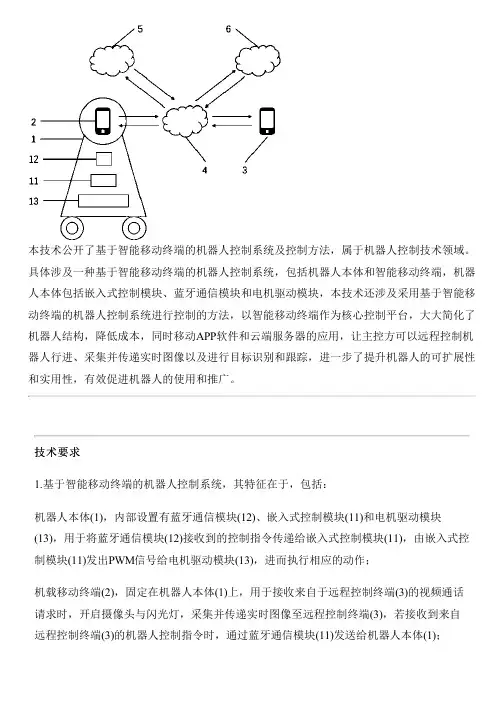
本技术公开了基于智能移动终端的机器人控制系统及控制方法,属于机器人控制技术领域。
具体涉及一种基于智能移动终端的机器人控制系统,包括机器人本体和智能移动终端,机器人本体包括嵌入式控制模块、蓝牙通信模块和电机驱动模块,本技术还涉及采用基于智能移动终端的机器人控制系统进行控制的方法,以智能移动终端作为核心控制平台,大大简化了机器人结构,降低成本,同时移动APP软件和云端服务器的应用,让主控方可以远程控制机器人行进、采集并传递实时图像以及进行目标识别和跟踪,进一步了提升机器人的可扩展性和实用性,有效促进机器人的使用和推广。
技术要求1.基于智能移动终端的机器人控制系统,其特征在于,包括:机器人本体(1),内部设置有蓝牙通信模块(12)、嵌入式控制模块(11)和电机驱动模块(13),用于将蓝牙通信模块(12)接收到的控制指令传递给嵌入式控制模块(11),由嵌入式控制模块(11)发出PWM信号给电机驱动模块(13),进而执行相应的动作;机载移动终端(2),固定在机器人本体(1)上,用于接收来自于远程控制终端(3)的视频通话请求时,开启摄像头与闪光灯,采集并传递实时图像至远程控制终端(3),若接收到来自远程控制终端(3)的机器人控制指令时,通过蓝牙通信模块(11)发送给机器人本体(1);远程控制终端(3),用于依据接收来自于机载移动终端(2)的实时图像,将其在屏幕上显示,同时进行按键控制、语音控制和陀螺仪控制三种控制模式,对机器人发送控制指令;云端服务器(4),用于在接收到来自客户端的服务请求时,依据服务请求的内容验证客户端权限,并将服务请求转发至相应的服务器;视频通话与指令服务器(5),用于依据接收到视频通话和指令服务请求时,为相关客户端建立视频通话和指令收发通道;人脸识别服务器(6),用于依据接收到人脸识别服务请求时,对客户端发送过来的人脸图像进行识别并返回识别结果。
2.根据权利要求1所述的基于智能移动终端的机器人控制系统,其特征在于,所述机器人本体(1)通过蓝牙串口协议与所述机载移动终端(2)连接。
移动机器人控制系统中的软件实现移动机器人控制系统中的软件实现移动机器人是一类随时可以运动的机器人,其使用的控制系统是这类机器人最重要的组成部分之一。
随着计算机能力的提升和编程技术的进步,现代移动机器人控制系统已经变得越来越先进,并且越来越受到人们的关注。
在当前移动机器人中,软件实现在其中起着至关重要的作用。
本文将详细探讨移动机器人控制系统中的软件实现。
一、移动机器人控制系统概述移动机器人是一种能够进行自主移动的工业机器人,能够在任何地方执行任务。
移动机器人的设计和研究可以跟踪到20世纪70年代初。
随着技术水平的提高和计算机的普及,移动机器人得以迅速发展。
当前,移动机器人已逐渐广泛应用于物流输送、医疗保健、工厂自动化等行业领域。
移动机器人控制系统是此类机器人的核心组成部分,控制系统设计需要建立在先进的计算技术、智能控制算法和可靠的硬件架构之上。
通常,移动机器人控制系统由机器人底盘、云台和传感器等硬件部分组成,而软件实现则负责移动机器人的机械动作,其功能包括环境感知、路径规划、动作控制等。
二、移动机器人控制系统的软件实现1. 环境感知环境感知是控制移动机器人的核心部分之一。
它需要通过一系列传感器来获取机器人周边环境的各种信息,如障碍物、墙壁和地面等。
目前移动机器人中最常用的感知技术是视觉、激光雷达和超声波传感器。
视觉传感器可以用于识别机器人视野中的图像,例如车道线、交通标志和行人等。
激光雷达可以在三维空间中获取高精度距离、位置和方向等信息,以确保机器人可以自主进行导航。
超声波传感器通常用于识别障碍物和重要物品等。
在软件开发方面,需要专门的算法来处理环境感知。
这些算法包括目标检测、特征提取、图像配准和三维重建等,以确保机器人可以在复杂的环境中感知周围的信息。
2. 路径规划路径规划是移动机器人控制系统的基本功能之一。
其目的是为机器人提供最短路径或最优路径,以确保其能够快速而安全地完成任务。
机器人路径规划通常包含三个阶段:建图、路径规划和路径跟踪。
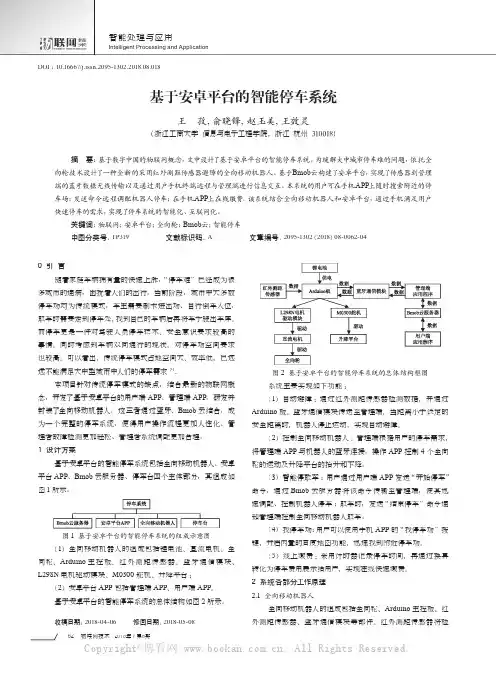
物联网技术 2018年/第8期62基于安卓平台的智能停车系统王 孜,俞晓锋,赵玉美,王效灵(浙江工商大学 信息与电子工程学院,浙江 杭州 310018)摘 要:基于数字中国的物联网概念,文中设计了基于安卓平台的智能停车系统。
为缓解大中城市停车难的问题,依托全向轮技术设计了一种全新的采用红外测距传感器避障的全向移动机器人。
基于Bmob 云构建了安卓平台,实现了传感器到管理端的蓝牙数据无线传输以及通过用户手机终端远程与管理端进行信息交互。
本系统的用户可在手机APP 上随时搜索附近的停车场;发送命令远程调配机器人停车;在手机APP 上在线缴费。
该系统结合全向移动机器人和安卓平台,通过手机满足用户快速停车的需求,实现了停车系统的智能化、互联网化。
关键词:物联网;安卓平台;全向轮;Bmob 云;智能停车中图分类号:TP319 文献标识码:A 文章编号:2095-1302(2018)08-0062-04————————————————收稿日期:2018-04-06 修回日期:2018-05-08DOI :10.16667/j.issn.2095-1302.2018.08.0180 引 言随着家庭车辆拥有量的快速上涨,“停车难”已经成为很多城市的通病,困扰着人们的出行。
当前阶段,城市中大多数停车场均为传统模式,车主需要刷卡进出场、自行倒车入位,取车时需要走到停车处,找到自己的车辆后再将车子驶出车库。
而停车更是一件对驾驶人员停车技术、安全意识要求较高的事情。
同时考虑到车辆双向通行的现状,对停车场空间要求也较高。
可以看出,传统停车模式占地空间大、效率低,已远远不能满足大中型城市中人们的停车需求[1]。
本项目针对传统停车模式的缺点,结合最新的物联网概念,开发了基于安卓平台的用户端APP 、管理端APP ,研发并封装了全向移动机器人,这三者通过蓝牙、Bmob 云结合,成为一个完整的停车系统,使得用户操作流程更加人性化、管理者故障检测更加轻松、管理者系统调配更加合理。