精粗饲料混合搅拌机的设计【立式电机驱动精粗饲料混合搅拌机】
- 格式:pdf
- 大小:1.60 MB
- 文档页数:16
![30立方自走TMR车说明书2012[1].12.19](https://uimg.taocdn.com/3d0207284b35eefdc8d333e5.webp)
华农机械HUANONGSJBY30TMR车使用说明-目录前言 (3)一.机械部分1.技术性能参数 (4)2.结构说明 (4)3.使用和操作 (5)4.维护保养 (5)5. 易损件、外购件 (6)6. 附图 (8)二.液压部分1. 技术规格 (9)2.总体尺寸 (10)3.安装 (10)4.使用 (10)5.具体操作方法 (11)6.维护与保养 (12)7.液压系统主要零部件 (13)8. 易损件明细 (13)三.出厂清单 (13)前言为适应养殖场现代化需求,我公司吸取国外先进技术,研发了SJBY30TMR车,集取各种粗饲料和精饲料以及饲料添加剂,以合理的顺序,投放在TMR车箱体内,通过搅轮和刀片对饲料切碎、揉搓、软化、搓细,经过充分的混合后,获得增加营养指标的全混合日粮。
SJBY30TMR车利用汽车上配备的发动机做动力,采用液压驱动。
便于机械饲喂,提高劳动生产率,降低管理成本,并实现规模化专业化的生产方式,减少饲料浪费,提高饲养科技含量,更利于奶牛场的防疫,降低疾病的发生率。
SJBY30TMR车配备了电子称重系统,计量准确,显示清晰,操作简单。
搅拌好的饲料运送到饲喂场并能发放均匀。
计独特的立式螺旋搅拌系统。
叶片上拥有高强度刀片,能使饲料以更快的速度和最佳的均匀度得以搅拌,以便使您达到最佳的饲喂效果。
独特的结构设计只需较低的动力输出。
泌乳高峰期的奶牛采食高能量浓度的TMR日粮,可以在保证不降低乳脂率的情况下,维持奶牛健康体况,有利于提高奶牛受胎率及繁殖率。
采用TMR后,饲养工不需要将精料、粗料和其他饲料分道发放,只要将料送到即可;采用TMR后管理轻松,降低管理成本。
二、技术参数:2、结构说明SJBY30TMR车主要由汽车底盘、箱体、螺旋搅轮系统、液压驱动系统、称重系统等组成。
2.1箱体箱体系钢制焊接斗型容器,四周板面为向外微凸形(防止板面变形),顶部为开口形式,内周边用耐磨板加强,箱体前后两侧为出料口,配有液压出料门。
三维运动混合机设计引言:混合机是一种常见且重要的机械设备,在化工、食品、医药等行业中广泛应用。
传统的混合机一般只能进行二维运动,即绕垂直轴的旋转运动,这种混合方式存在混合效果不佳、产品混合不均匀等问题。
为了解决这些问题,本设计提出了一种具有三维运动功能的混合机设计。
设计方案:该混合机设计采用了三维运动方式,能够在旋转的同时实现上下移动和左右摇摆,从而实现多向度的混合。
具体设计如下:1.结构设计:该混合机采用立式结构,主要由底座、旋转机构、上下移动机构和左右摇摆机构组成。
(1)底座:底座采用坚固耐用的材料制成,具有稳定的支撑作用。
(2)旋转机构:旋转机构包括电机、传动轴和搅拌桨。
电机通过传动轴带动搅拌桨进行旋转运动,从而实现产品的搅拌。
(3)上下移动机构:上下移动机构包括电机、传动轴和升降装置。
电机通过传动轴带动升降装置进行上下移动,实现产品的上下混合。
(4)左右摇摆机构:左右摇摆机构包括电机、传动轴和摇摆装置。
电机通过传动轴带动摇摆装置进行左右摇摆,实现产品的横向混合。
2.工作原理:该混合机的工作原理如下:(1)旋转运动:启动旋转机构中的电机,电机带动传动轴和搅拌桨进行旋转运动,实现产品的搅拌。
(2)上下移动:启动上下移动机构中的电机,电机带动传动轴和升降装置进行上下移动,实现产品的上下混合。
(3)左右摇摆:启动左右摇摆机构中的电机,电机带动传动轴和摇摆装置进行左右摇摆,实现产品的横向混合。
根据不同的混合要求,可以调整旋转运动、上下移动和左右摇摆的频率和幅度,实现多种混合效果。
3.优点:该三维运动混合机具有以下优点:(1)混合效果好:通过三维运动,使得产品能够在多个方向上进行混合,从而混合效果更好。
(2)混合均匀:采用多向度的混合方式,可以使得产品更加均匀混合,避免出现局部混合不均匀的情况。
(3)可调节性强:通过调整旋转运动、上下移动和左右摇摆的频率和幅度,可以实现不同混合要求下的混合效果。
结论:该三维运动混合机设计具有良好的混合效果和混合均匀性,可以满足不同行业的混合需求。
搅拌器设计选型绪论搅拌可以使两种或多种不同的物质在彼此之中互相分散,从而达到均匀混合;也可以加速传热和传质过程。
在工业生产中,搅拌操作时从化学工业开始的,围绕食品、纤维、造纸、石油、水处理等,作为工艺过程的一部分而被广泛应用。
搅拌操作分为机械搅拌与气流搅拌。
气流搅拌是利用气体鼓泡通过液体层,对液体产生搅拌作用,或使气泡群一密集状态上升借所谓上升作用促进液体产生对流循环。
与机械搅拌相比,仅气泡的作用对液体进行的搅拌时比较弱的,对于几千毫帕秒以上的高粘度液体是难于使用的。
但气流搅拌无运动部件,所以在处理腐蚀性液体,高温高压条件下的反应液体的搅拌时比较便利的。
在工业生产中,大多数的搅拌操作均系机械搅拌,以中、低压立式钢制容器的搅拌设备为主。
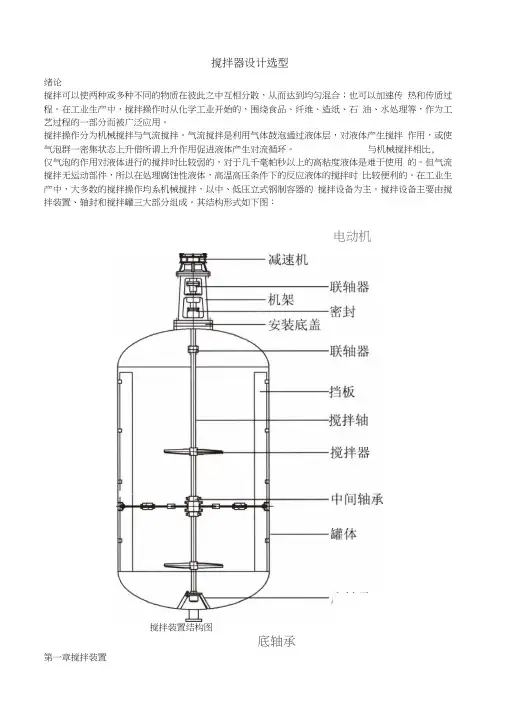
搅拌设备主要由搅拌装置、轴封和搅拌罐三大部分组成。
其结构形式如下图:电动机搅拌装置结构图底轴承第一章搅拌装置第一节搅拌装置的使用范围及作用搅拌设备在工业生产中的应用范围很广,尤其是化学工业中,很多的化工生产都或多或少地应用着搅拌操作。
搅拌设备在许多场合时作为反应器来应用的。
例如在三大合成材料的生产中,搅拌设备作为反应器约占反应器总数的99%。
搅拌设备的应用范围之所以这样广泛,还因搅拌设备操作条件(如浓度、温度、停留时间等)的可控范围较广,又能适应多样化的生产。
搅拌设备的作用如下:①使物料混合均匀;②使气体在液相中很好的分散;③使固体粒子(如催化剂)在液相中均匀的悬浮;④使不相溶的另一液相均匀悬浮或充分乳化;⑤强化相间的传质(如吸收等);⑥强化传热。
搅拌设备在石油化工生产中被用于物料混合、溶解、传热、植被悬浮液、聚合反应、制备催化剂等。
例如石油工业中,异种原油的混合调整和精制,汽油中添加四乙基铅等添加物而进行混合使原料液或产品均匀化。
化工生产中,制造苯乙烯、乙烯、高压聚乙烯、聚丙烯、合成橡胶、苯胺燃料和油漆颜料等工艺过程,都装备着各种型式的搅拌设备。
第二节搅拌物料的种类及特性搅拌物料的种类主要是指流体。
目录提出背景及其存在问题 (2)结构方案的确信 (5)3 传动方案的设计 (6)电动机选择 (7)带传动的设计计算 (7)带轮的结构设计 (9)凿片的结尾线速度V (10)转子工作直径和粉碎室宽度 (10)转子工作直径D (11)粉碎室宽度B (11)转子转速n的确信 (11)粉碎机生产率Q的确信 (12)配套功率N (12)锤筛间隙设计 (14)喂料装置设计 (15)6 标准件的设计与校核 (17)轴的校核 (18)销轴的设计计算 (21)计算支承反力、扭矩及弯矩 (21)图13 支撑反力的计算 (21)Support reverse force calculation (21)Ra=228N == (29) (21)Rb=176N ==(30) .......................................................................................................................................... 21 Mc=2222)1000()1000(b Ft b Fr Mcy Mcx ⨯+⨯=+=153Nm(31) .......................................................................................................................................... 21 Mb==⨯+⨯=2222)1000()1000(a Ft a Fr Mby Mbx 211Nm(32) (22)轴承 (22)轴承的选择 (22)轴承的润滑和密封 (22)轴承的密封 (23)轴承端盖的设计 (23)Figure 13 Structure of bearing end cover (23)轴系零件的定位 (23)周向定位 (24)机架设计 (24)箱体的设计 (24)7 锤片式粉碎机注意事项、保护和保养 (24)附录 (28)粗饲料粉碎机的设计摘要:粗饲料含有丰硕的微量营养成份,且具有较高的饲养价值。
饲料混合机设备介绍概述饲料混合机是一种用于饲料加工的设备,主要用于将不同成分的饲料原料混合在一起,以达到均衡营养的目的。
饲料混合机广泛应用于饲料加工工厂、养殖场等领域。
设备分类根据结构和工作方式的不同,饲料混合机可以分为以下几类:直接混合式饲料混合机直接混合式饲料混合机是指将所有饲料原料一次性投入混合机中进行混合,混合完毕后取出。
它的优点是混合时间短,生产效率高,适用于加工相对简单的饲料产品。
循环混合式饲料混合机循环混合式饲料混合机是指将部分饲料原料先进行混合,然后加入其他的饲料原料进行混合,循环多次后混合完成。
它的优点是可以对不同的饲料原料进行逐个加工,并且混合效果更加均匀,适用于加工多样化、营养成分复杂的饲料产品。
垂直混合式饲料混合机垂直混合式饲料混合机是使用螺旋提升机将所有饲料原料送入混合机的上部,然后通过螺旋翻转将饲料原料从上往下混合。
它的优点是混合均匀度高,混合时间短,适用于生产效率要求高的产品。
设备结构饲料混合机主要由混合筒、进料机构、出料机构、传动机构、搅拌装置等组成。
•混合筒是将饲料原料混合的主要部件,其形状可以是圆筒形、长方形或三角形等多种形状。
•进料机构是通过提升机或者进料斗将饲料原料送入混合筒。
•出料机构是通过位于混合筒下部的出料口将混合后的饲料原料送出。
•传动机构为饲料混合机提供动力,通常采用电动机和减速机组合。
•搅拌装置包括主轴、搅拌器、刀片等组件,通过搅拌装置将饲料原料进行混合。
设备使用在使用饲料混合机时,首先要确认饲料原料的种类和含量。
然后按照混合机的使用说明书进行操作,将饲料原料投入混合筒中,启动混合机,进行混合。
为了保证混合的效果和设备的正常运行,需要进行定期维护和保养,例如清洗混合筒和搅拌装置内部,检查传动机构、电气系统等部件是否工作正常。
结语饲料混合机是一种专门用于饲料加工的设备,其混合效果直接决定了饲料产品的品质和可销售性。
因此,在购买和使用饲料混合机时,要根据自己的实际需求选择合适的型号,并且认真遵守其使用说明和维护维修要求,以保证设备的正常运行和生产效率。
Qq:1269408632目录摘要 (1)关键词 (1)1 前言 (2)1.1 设计的目的和意义 (2)1.2 提出背景及其存在问题 (2)1.3 设计的关键问题及解决的思路 (3)2 粉碎机结构的确定 (3)2.1 各类粉碎机特点的比较与选择 (4)2.2 结构方案的确定 (5)2.3 工作原理 (5)3 传动方案的设计 (7)3.1 电动机选择 (7)3.2 带传动的设计计算 (7)3.3 带轮的结构设计 (9)4 锤片式粉碎机的参数选择 (9)4.1 凿片的末端线速度V (10)4.2 转子工作直径和粉碎室宽度 (10)4.2.1 转子工作直径D (11)4.2.2 粉碎室宽度B (11)4.3 转子转速n的确定 (11)△ (11)4.4 凿片和齿板间隙R4.5 粉碎机生产率Q的确定 (12)4.6 配套功率N (12)5 锤片式粉碎机的零件设计 (12)5.1 锤片的选择 (12)5.2 筛子设计 (12)5.3 锤筛间隙设计 (14)5.4 转子设计 (14)5.5 喂料装置设计 (15)5.6 闸板设计 (15)5.7 粉碎室设计 (16)6 标准件的设计与校核 (17)6.1 轴的设计 (17)6.2 轴的校核 (18)6.3 键的选择与校核 (20)6.4 销轴的设计计算 (21)6.5 轴承 (22)6.5.1 轴承的选择 (22)6.5.2 轴承的润滑和密封 (22)6.5.3 轴承的密封 (23)6.5.4 轴承端盖的设计 (23)6.6 轴系零件的定位 (23)6.6.1 轴向定位 (23)6.6.2 周向定位 (23)6.7 机架设计 (24)6.8 箱体的设计 (24)7 锤片式粉碎机注意事项、维护和保养 (24)8 结论 (26)参考文献 (27)致谢 (27)附录 (28)粗饲料粉碎机的设计学生:谢哲指导老师:任述光(湖南农业大学东方科技学院,长沙410128)摘要:粗饲料含有丰富的微量营养成分,且具有较高的饲养价值。
机械原理课程设计自动喂料搅拌机小组成员目录一、设计题目(包括设计条件、要求)二、功能分析三、机构选用四、方案评价(要求二种方案,多者不限)五、机构组合(绘制机械运动简图)六、机械系统运动循环图八、机构几何尺寸计算和运动分析九、运用三维动画验证机构运动设计的合理性(部分机构)十、设计总结十一、主要参考文献。
一.设计题目设计用于化学工业和食品工业的自动喂料搅拌机。
物料的搅拌动作为:电动机通过减速装置带动容器绕垂直轴缓慢整周转动;同时,固连在容器内拌勺点E沿图1虚线所示轨迹运动,将容器中拌料均匀搅动。
物料的喂料动作为:物料呈粉状或粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭。
喂料机的开启、关闭动作应与搅拌机同步。
物料搅拌好以后的输出可不考虑。
工作时假定拌料对拌勺的压力与深度成正比,即产生的阻力呈线性变化,如图1示。
图1 喂料搅拌机外形及阻力线图二. 功能分解该机器是为了完成自动喂料搅拌功能,需实现以下的运动功能要求:(1)呈粉状或粒状的物料定时从漏斗中漏出输料一段时间后漏斗自动关闭。
因此需要设计相应的摆动从动件凸轮机构来实现。
(2)容器在电动机的带动下通过减速装置绕垂直轴转动。
因此需要设计适当的齿轮机构来实现。
(3)固连在容器内拌勺按照规定的轨迹运动,将容器中拌料均匀搅动。
因此需要合适的四杆机构来实现。
通过对这三个机构的运动功能作进一步分析,可知道他们应该分别实现以下基本运动:(1)摆动从动件凸轮机构的基本运动有:运动形式的变换,运动停歇,运动方向交替变换。
(2)齿轮机构的运动形式有:运动缩小,齿轮回转运动,运动轴线变换。
(3)四杆机构的运动形式有:连杆的的回转运动。
三.机构选用四.方案评价根据拌勺E的搅拌轨迹、搅拌机的运动分析和动态静力分析及飞轮转动惯量产生A、B两种方案,如下表表1拌勺E的搅拌轨迹数据表2自动喂料搅拌机运动分析数据表3自动喂料搅拌机动态静力分析及飞轮转动惯量数据方案评价:一.机构的复杂性紧凑性方案A中蜗杆头数z1=1 蜗轮齿数z2=240 轮系齿数z1=z2`=17 z2=34 z3=85方案B中蜗轮头数z1=1 蜗轮齿数z2=160 轮齿系数z1=17 z2`=24 z2=102 z3=72所以方案B的齿轮比方案A的齿轮紧凑二.运动平稳性从表3可看出A方案所受的阻力小于B方案,A中最大力与最小力之差较小所以运动过程A较平稳三.从效率来看由表2可看出A方案电动机转速大于B方案的电动机转速,且A方案每次搅拌时间较少所以A方案的效率更高四经济性可行性从效率、平稳性来看A方案的经济性和可行性更高所以综合来看,A方案较好五、机构组合(绘制机械运动简图)图1为蜗轮蜗杆减速机构简图图1图2为摆动从动件盘形凸轮机构简图(控制进料)图2图3为铰链四杆机构简图图3图4为机构组合图(其中四杆机构和凸轮机构之间有轮系连接如图5所示)图4图5为连接四杆机构和凸轮机构的轮系六、机械系统运动循环图凸轮基0 90 180 270 360 圆转角七.机构几何尺寸计算和运动分析1.容器旋转功能中蜗轮蜗杆的参数2.轮系传动系统的数据分析A方案曲柄的转速6r/min 每次搅拌90秒即转9周蜗杆齿数z1=1 涡轮齿数z2=240蜗轮蜗杆减速传动比i=ω发动机/ω蜗轮=z2/z1=1440/6=240/1物料装入时间为50秒凸轮近休止程为π所以凸轮基圆周期为100秒即转速为0.6r/min所以传动比i=ω1/ω凸轮=6/0.6=10/1所以用轮系传动ω1/ω凸轮=(z2z3)/(z1z4)=(34*85)/(17*17)=10/1 B方案曲柄的转速9r/min 每次搅拌100秒即转15周蜗杆齿数z1=1 涡轮齿数z2=160蜗轮蜗杆减速传动比i=ω发动机/ω蜗轮=z2/z1=1440/9=160/1物料装入时间为60秒凸轮近休止程为π所以凸轮基圆周期为120秒即转速为0.5r/min所以传动比i=ω1/ω凸轮=9/0.5=18/1所以用轮系传动ω1/ω凸轮=(z2z3)/(z1z4)=(102*72)/(17*24)=18/1八、运用三维动画验证机构运动设计的合理性(部分机构)见文件《部分三维动画》九.设计总结该设计机构主要包括三方面的运动:1.电动机带动容器旋转2.摆动从动件盘形凸轮机构执行进料口的开启和闭合 3.铰链四杆机构执行搅拌运动。
精粗饲料混合搅拌机的设计【立式电机驱动精粗饲料混合搅拌机】【优秀含SW三维3D建模及9张CAD图纸机械设计制造及其自动化课程毕业设计+带任务书+开题报告+35页加正文10500字】
【详情如下】【需要咨询购买全套设计请加QQ1459919609】
精粗饲料混合搅拌机的设计【立式电机驱动精粗饲料混合搅拌机设计】
3D.stp
SW三维
中期检查表.doc
主轴.dwg
任务书.doc
刀片.dwg
剪力图.dwg
圆柱齿轮109×2.dwg
圆柱齿轮73×2.dwg
大带轮-孔板轮.dwg
套筒.dwg
小带轮-实心轮.dwg
开题报告.doc
料筒.dwg
答辩PPT.pptx
精粗饲料混合-装配图.dwg
精粗饲料混合搅拌机的设计.doc
精粗饲料混合搅拌机的设计【立式电机驱动精粗饲料混合搅拌机设计】
前 言
随着我国畜牧业的迅速发展,养殖业科技水平不断提高,对饲料提出了更高的要求,原有的饲料厂的成料已无法同时满足每家每户的不同要求。
饲料工业是现代畜牧业和水产养殖业发展的物质基础,直接关系着农业、农村经济发展和人民群众生活水平的提高,己成为中国国民经济的重要基础产业之一。
为了进一步提高养殖质量,养殖户需要自行对饲料进行调整,这样能够满足养殖户的要求的占地面积小、制造成本低的饲料混合搅拌机便迅速在市场中热销。
饲料混合搅拌机的发展至今已在饲料机械行业占有重要位置,对其所开展的理论分析和实验研究也更加深入。
对混合搅拌技术的研究主要围绕着两个方面展开:一方面是开发新型、高效的混合设备,另一方面是合理地选择混合设备。
为了提高饲料混合搅拌机的混合质量,本课题对市场上现有的精粗饲料混合搅拌机
的进行改进研究,并设计了立式电机驱动精粗饲料混合搅拌机。
关键词:养殖业;饲料;混合搅拌机;立式
目 录
1 概述 1
1.1课题综述 1
1.2 设计任务分析及方案选择 3
2 结构设计 4
2.1 搅拌机总体结构设计 4
2.2 搅拌机主要结构详细设计 4
3 传动系统总体设计 8
3.1 传动方案的拟定 8
3.2 搅龙转速的确定 8
3.3 电机的选择 9
3.4传动装置总传动比的计算和各级传动比的分配 11
3.5传动装置运动和动力参数的计算 11
4 传动零件的设计计算 13
4.1 带轮传动设计 13
4.2 减速器传动设计 14
4.3 齿轮传动设计 15
4.4 主轴的设计与校核 20
4.5 轴承的选定及校核 25
5 其他结构设计、密封及润滑 28
5.1 料仓门设计 28
5.2 刀片的选择 28
5.3 润滑和密封 29
总 结 30
致 谢 31
参考文献 32
工程概况
本文首先分析了养殖业的发展状况及当今饲料混合搅拌机的发展,根据设计要求,本课题设计的是电机驱动立式饲料混合搅拌机,饲料自动混合搅拌机制备动物饲料的机器,它的功能包括切割、混合搅拌各类饲
料原料,该机拟采用电机带动减速系统驱动机械传动实现切割、混合各类饲料原料,通过机械传动的结合,实现各种饲料混料的出料。
本次设计的精粗饲料混合搅拌机与传统混合搅拌机相比,其叶片是锥形螺旋叶片,在混合搅拌的过程可以实现径向及周向双向混合搅拌,以达到快速混合搅拌均匀的目的。