气动执行器工作原理
- 格式:docx
- 大小:149.79 KB
- 文档页数:6

气动阀门执行器的控制方式及工作原理气动执行器结构在实际工业生常和工业控制中,用来控制气动执行机构的方法也很多,常用的有以下几种。
(一)基于单片机开发的智能显示仪控制智能显示仪是用来监测阀门工作状态,并控制阀门执行期工作的仪器,它通过两路位置传感器监视阀门的工作状态,判断阀门是处于开阀还是关阀状态,通过编程记录阀门开关的数字,并且有两路与阀门开度对应的4~20mA输出及两足常开常闭输出触点。
通过这些输出信号,控制阀门的开关动作。
根据系统的要求,可将智能阀门显示仪从硬件上分为3部分来设计:模拟部分、数字部分、按键/显示部分。
1、模拟电路部分主要包括电源、模拟量输入电路、模拟量输出电路三部分。
电源部分供给整个电路能量,包括模拟电路、数字电路和显示的能源供应。
为了实现阀门开读的远程控制,需要将阀门的开度信息传送给其他的控制仪表,同时控制仪表能从远方制定阀门为某一开度,系统需要1路4~20mA的模拟量输入信号和1~2路4~20mA的模拟量输出信号。
模拟量输入信号通过A/D转换变成与阀门开度相对应的数字信号后送给数字部分的单片机,在单片机中对它进行滤波处理后就可以输出了。
阀门的开度信息通过D/A转换后变成模拟信号输出,用来接显示仪显示阀门开度或连接其他的控制设备。
在本设计系统中,所有的数字量数据均采用串行的输入输出方式,为了节省芯片资源和空间,输入的4~20mA 的模拟量在转化为数字量时,采用已有的4路DA芯片与单片机的系统资源相结合作8位的AD使用。
2、数字电路部分主要包括:单片机、掉电保护、两路监测脉冲输入信号、两路常开常闭转换触点输出。
在设计方案中选用目前普遍使用的51系列单片机AT89C4051。
AT89C4051是一款低电压、高性能的CMOS8位微控制器,它具有4K字节的可擦除、可重复编程的只读闪存。
通过在单芯片内复合一个多功能的8位CPU闪存,在性能、指令设定和引脚上与80C51和80C52完全兼容。

气动工作原理气动工作原理是指利用气体压力来驱动机械装置进行工作的基本原理。
在工业生产中,气动工作原理被广泛应用于各种机械设备和生产线中,其简单、高效、安全的特点受到了广泛的青睐。
首先,气动工作原理的基础是气体的压缩和膨胀。
当气体被压缩时,其分子间的距离减小,从而增加了气体分子的碰撞频率和压力,这种压缩气体可以存储在气缸中,通过控制气源和阀门,可以将压缩气体释放到气动执行器中,从而驱动机械装置进行工作。
而当气体膨胀时,其分子间的距离增大,压力减小,这种原理被应用在气动制动系统中,通过控制气源和阀门,使气体膨胀产生制动力,实现机械装置的停止和控制。
其次,气动工作原理的关键是气动执行器。
气动执行器是将压缩气体的能量转换为机械能的装置,包括气缸、气动马达等。
气缸是气动执行器中最常见的一种,其工作原理是通过控制气源和阀门,使压缩气体进入气缸,推动活塞运动,从而驱动连杆、活塞杆等机械装置进行工作。
而气动马达则是将压缩气体的能量转换为旋转运动的装置,通过控制气源和阀门,使压缩气体进入气动马达,驱动转子、齿轮等旋转部件进行工作。
最后,气动工作原理的应用范围非常广泛。
在工业生产中,气动工作原理被应用于各种机械设备和生产线中,如气动钻、气动切割机、气动输送机等,其简单、高效、安全的特点使其成为工业生产中不可或缺的一部分。
同时,在汽车制造、航空航天、医疗设备等领域,气动工作原理也有着重要的应用,如气动制动系统、飞机起落架、呼吸机等,其稳定、可靠的特点为这些领域的发展提供了有力支持。
综上所述,气动工作原理是利用气体压力来驱动机械装置进行工作的基本原理,其应用范围广泛,对工业生产和其他领域的发展起着重要的作用。
随着科学技术的不断进步,相信气动工作原理将会在未来发挥更加重要的作用,推动着各行各业的发展和进步。

气动执行器结构及原理 The final edition was revised on December 14th, 2020.气缸结构与原理学习气动执行机构气动执行机构俗称又称气动执行器(英文:Pneumatic actuator )按其能源形式分为气动,电动和液动三大类,它们各有特点,适用于不同的场合。
气动执行器是执行器中的一种类别。
气动执行器还可以分为单作用和双作用两种类型:执行器的开关动作都通过气源来驱动执行,叫做DOUBLE ACTING (双作用)。
SPRING RETURN (单作用)的开关动作只有开动作是气源驱动,而关动作是弹簧复位。
气动执行机构简介气动执行器的执行机构和调节机构是统一的整体,其执行机构有薄膜式、活塞式、拨叉式和齿轮齿条式。
活塞式行程长,适用于要求有较大推力的场合;而薄膜式行程较小,只能直接带动阀杆。
拨叉式气动执行器具有扭矩大、空间小、扭矩曲线更符合阀门的扭矩曲线等特点,但是不很美观;常用在大扭矩的阀门上。
齿轮齿条式气动执行机构有结构简单,动作平稳可靠,并且安全防爆等优点,在发电厂、化工,炼油等对安全要求较高的生产过程中有广泛的应用。
齿轮齿条式:齿轮齿条:活塞式:气动执行机构的缺点控制精度较低,双作用的气动执行器,断气源后不能回到预设位置。
单作用的气动执行器,断气源后可以依靠弹簧回到预设位置工作原理说明班当压缩空气从A管咀进入时,气体推动双活塞向两端(缸盖端)直线运动,活塞上的齿条带动旋转轴上的齿轮逆时针方向转动90度,阀门即被打开。
此时气动执行阀两端的气体随B管咀排出。
反之,当压缩空气从B官咀进入气动执行器的两端时,气体推动双塞向中间直线运动,活塞上的齿条带动旋转轴上的齿轮顺时针方向转动90度,阀门即被关闭。
此时气动执行器中间的气体随A管咀排出。
以上为标准型的传动原理。
根据用户需求,气动执行器可装置成与标准型相反的传动原理,即选准轴顺时针方向转动为开启阀门,逆时针方向转动为关闭阀门。

气动系统的工作原理
气动系统是一种利用气体流动原理来实现动力传递和控制的系统。
它由气源、执行器、控制元件和管路组成。
气源通常为压缩空气,可以通过空气压缩机将大气中的空气压缩后供给气动系统。
执行器是气动系统中的作动元件,根据控制信号产生相应的动作。
常见的气动执行器有气缸和旋转执行器。
气缸通过压缩空气作用于活塞上来实现直线运动,而旋转执行器通过压缩空气使转子旋转来实现角度变化。
控制元件用于对气源和执行器之间的气流进行控制。
常见的控制元件有气控阀和方向控制阀。
气控阀是气动系统中的主要控制元件,它能根据控制信号调节气流的流量和压力,从而控制执行器的运动。
方向控制阀用来改变气体的流动方向,实现气缸的前后、左右运动。
管路是气动系统中传递气流的通道,它连接气源、控制元件和执行器,将气源产生的气压传递给执行器,从而实现动力传递和控制。
气动系统的工作原理基于气体流动的基本原理。
当气源产生气压时,气体沿着管路流动,进入执行器,对执行器施加压力,从而使其产生相应的运动。
控制元件通过对气体流动进行调节,控制执行器的运动。
当控制信号改变时,控制元件相应地改变气体流动路径,从而实现不同的控制动作。
总的来说,气动系统通过利用气体流动原理,将气源产生的气
压传递给执行器,并通过控制元件对气流进行控制,实现相应的动作和控制功能。
这种工作原理使气动系统具有快速、灵活、稳定等特点,广泛应用于各种工业自动化和机械控制领域。

气动执行单作用和双作用气路连接原理《气动执行单作用和双作用气路连接原理》气动执行器是一种常用的传动装置,广泛应用于工业自动化系统中。
在气动系统中,气动执行器根据工作方式可分为单作用和双作用两种类型。
气动执行器的连接原理是决定其工作性能和稳定性的关键。
气动执行单作用气路的连接原理是将气源直接连接到气缸的一端,通过控制气源的开关,使气压进入气缸推动活塞运动。
在单作用气缸内部设置一个弹簧或重物,当气源关闭时,弹簧或重物会使活塞回到原始位置。
相比之下,气动执行双作用气路的连接原理相对复杂一些。
气动执行双作用气路需要通过一个更加复杂的气路系统来实现正反两个方向的运动控制。
双作用气缸的连接原理是将气源分别连接到气缸的两端,通过控制气源的开关,使气压进入气缸的一端推动活塞前进,当需要反向运动时,将气压源切换到气缸的另一端推动活塞后退。
气动执行单作用和双作用气路的连接原理有一些共同之处。
首先,它们都需要使用管道将气源与气缸连接起来,以便控制气源的压力传递。
其次,它们都需要使用气阀或气控元件来控制气源的开关,以实现气压的传递和控制。
然而,气动执行单作用和双作用气路的连接原理也存在一些差异。
在单作用气缸中,只需要一个气源进入气缸即可,而在双作用气缸中,需要分别接入气缸的两端。
此外,气动执行双作用气路在控制方面更加复杂,需要使用更多的气阀和控制元件来实现正反向的运动控制。
总之,气动执行单作用和双作用气路的连接原理是气动执行器正常工作的基础。
了解其连接原理可以帮助工程师正确设计和布置气动系统,确保气动执行器的稳定性和高效性。
通过合理控制气源的开关和压力传递,气动执行器可以实现更加精确和可靠的工作。
气动执行器机构工作原理
气动执行器机构工作原理
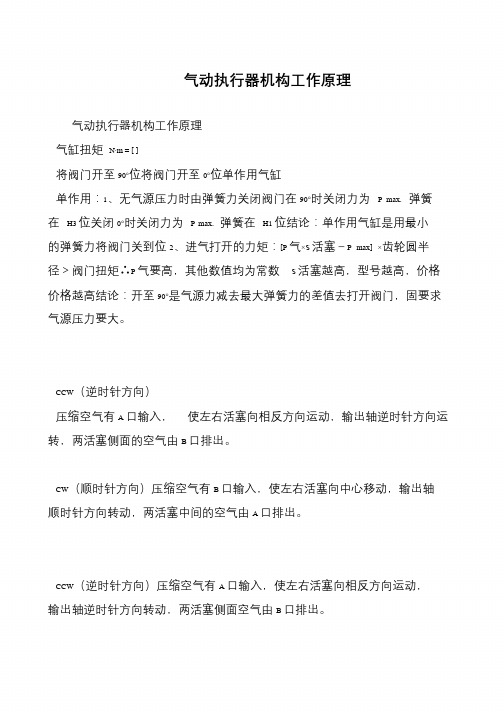
气缸扭矩N·m = [ ]
将阀门开至90°位将阀门开至0°位单作用气缸
单作用:1、无气源压力时由弹簧力关闭阀门在90°时关闭力为P max. 弹簧在H3 位关闭0°时关闭力为P max. 弹簧在H1 位结论:单作用气缸是用最小的弹簧力将阀门关到位2、进气打开的力矩:[P 气×S活塞-P max] ×齿轮圆半径>阀门扭矩∴P 气要高,其他数值均为常数S 活塞越高,型号越高,价格
价格越高结论:开至90°是气源力减去最大弹簧力的差值去打开阀门,固要求
气源压力要大。
CCW(逆时针方向)
压缩空气有A 口输入,使左右活塞向相反方向运动,输出轴逆时针方向运转,两活塞侧面的空气由B 口排出。
CW(顺时针方向)压缩空气有B 口输入,使左右活塞向中心移动,输出轴
顺时针方向转动,两活塞中间的空气由A 口排出。
CCW(逆时针方向)压缩空气有A 口输入,使左右活塞向相反方向运动,
输出轴逆时针方向转动,两活塞侧面空气由B 口排出。
气动阀门执行器原理
气动阀门执行器是一种常用的工业执行器,主要用于控制阀门的开启和关闭。
它的工作原理可以简单概括为以下几个步骤:
1. 气源供给:气动阀门执行器需要通过气源来提供动力。
一般情况下,执行器会连接到气源系统中,通过管道输送气体至执行器。
2. 控制气压:执行器内部有一个气压控制系统,可以控制阀门的开启和关闭。
通过改变气源的压力,可以调节执行器的工作状态。
3. 活塞运动:执行器内部有一个活塞,通过气压的作用使活塞上下运动。
当气压作用在活塞的一侧时,活塞向另一侧移动,实现阀门的开启或关闭。
4. 连接阀门:执行器通过机械装置与阀门相连接,使得活塞的运动可以转化为阀门的运动。
当活塞向上移动时,阀门打开;当活塞向下移动时,阀门关闭。
5. 反馈信号:为了控制阀门的位置,执行器通常会配备反馈装置,用于监测阀门位置并向控制系统反馈信息。
通过反馈信号,控制系统可以实时监控和调节阀门的工作状态。
总结来说,气动阀门执行器通过气源供给、控制气压、活塞运动、连接阀门和反馈信号等步骤,实现对阀门的精确控制。
它在工业领域中被广泛应用,具有快速响应、可靠性高等特点。
阀门气动执行器上的工作原理一、引言气动执行器是工业自动化控制系统中常用的执行机构,广泛应用于各种管道、容器和设备上。
气动执行器包括气缸、旋转执行器和阀门执行器等类型,其中阀门气动执行器是最为常见的一种。
本文将详细介绍阀门气动执行器的工作原理。
二、阀门气动执行器的组成阀门气动执行器主要由以下几个部分组成:1. 气缸:负责将压缩空气转换为机械能,推动活塞实现开关阀门;2. 阀体:安装在管道或设备上,通过旋转或升降来控制流体的通断;3. 连杆:将气缸和阀体连接起来,传递力量;4. 位置反馈装置:用于检测阀门的开闭状态,并将信号反馈给控制系统。
三、工作原理1. 初始状态当阀门处于关闭状态时,气缸处于伸出状态(即活塞向外伸出),此时连杆与阀体连接处于最低点,并且位置反馈装置也会相应地反馈信号。
2. 开启过程当控制系统发出开启指令时,气源进入气缸的A腔,推动活塞向内缩进,连杆也随之向上移动。
连杆在移动的过程中,通过与阀体连接的轴承使阀体旋转。
当阀体旋转到一定角度时,流体开始通畅地流过管道或设备。
3. 关闭过程当控制系统发出关闭指令时,气源进入气缸的B腔,推动活塞向外伸出,连杆也随之向下移动。
连杆在移动的过程中,通过与阀体连接的轴承使阀体旋转。
当阀体旋转到一定角度时,流体被完全切断。
4. 位置反馈位置反馈装置会检测阀门的开闭状态,并将信号反馈给控制系统。
控制系统可以根据反馈信号调整气源压力大小和方向来实现对阀门开闭状态的精确控制。
四、总结以上就是阀门气动执行器的工作原理。
通过控制气源压力和方向来驱动活塞实现开关阀门,并且通过位置反馈装置来检测阀门状态并进行精确控制。
在实际应用中,需要根据具体的工艺要求和管道设备的特点来选择合适的阀门气动执行器,以达到最佳的控制效果。
执行器的工作原理执行器是现代自动控制系统中的一种重要元件,其作用是把电能、气动、液压或机械能转化为机械运动或者其他形式的能量输出,以完成自动控制系统中的任务。
执行器广泛应用于工业自动化、机器人、智能家居等领域,是现代自动化技术中不可或缺的重要组成部分。
一、执行器的分类按动力形式分类,执行器可分为电动执行器、气动执行器、液动执行器及其他类型执行器。
其中电动执行器是获得最广泛应用的执行器。
1. 电动执行器电动执行器是利用电机或者电磁铁作为动力源,通过传动机构把电能转化为机械能的执行器。
电动执行器具有结构简单、体积小、输出力矩大、精度高等优点,适用于许多领域的自动化控制。
常用的电动执行器有直流电机执行器、交流电机执行器、步进电机执行器等。
2. 气动执行器气动执行器是利用气压作为动力源,把气压能转化为机械能输出的执行器。
气动执行器具有响应速度快、安全可靠、维护方便等优点,广泛应用于气动传动和自动控制系统中。
常用的气动执行器有气缸执行器、气动旋转执行器、薄膜执行器等。
3. 液动执行器液动执行器是利用液体作为动力源,通过液压传动转化为机械能输出的执行器。
液动执行器具有输出力矩大、卸载能力强、寿命长等优点,是某些工况下的理想选择。
常用的液动执行器有液压缸执行器、液压马达执行器等。
据应用范围分类,执行器可以分为工业执行器、消费电子执行器及医疗保健设备执行器等。
不同种类的执行器因其结构特点和应用场景的不同,其内部构造和工作原理也存在着较大差异。
二、执行器的工作原理执行器的工作原理建立在电、气、液等物理特性之上,通过不同形式的能量转换,把电、气、液能转化为机械能输出。
电动执行器、气动执行器及液动执行器的工作原理各不相同,下面针对这些不同类型的执行器作一详细介绍。
1. 电动执行器的工作原理电动执行器是利用电磁转矩或电机输出的机械转矩,通过传动机构产生机械活动输出的执行器。
电动执行器构造一般包含电机、减速机、联轴器、蜗杆、变速机构、输出轴等几个主要组成部分。
气动执行机构一、什么是气动执行机构?气动执行机构是一种利用压缩空气作为驱动力来完成运动控制的装置。
它由气源装置、气缸和气动控制装置三部分组成。
1. 气源装置气源装置主要由空气压缩机和气体处理装置组成。
空气压缩机通过压缩空气将气体转化为压缩气体,为气动执行机构提供驱动力。
气体处理装置的主要功能是过滤、分离和调节气体压力,确保气动执行机构正常运行。
2. 气缸气缸作为气动执行机构的核心部件,负责将压缩空气转化为线性或旋转运动。
常见的气缸有单向作用气缸和双向作用气缸两种。
单向作用气缸只能产生一个方向的运动,而双向作用气缸可以产生正反两个方向的运动。
3. 气动控制装置气动控制装置是控制气动执行机构工作的关键装置,它通常包括电磁阀、气缸定位元件、传感器和控制器等。
电磁阀负责控制气氛的流动方向和流量大小,气缸定位元件用于限制气缸的行程位置,传感器用于检测气缸的运动状态,控制器对传感器信号进行处理和控制。
二、气动执行机构的工作原理气动执行机构的工作原理可以概括为压力传递和转换。
当气源装置提供压缩空气后,压缩气体经过气瓶进入气缸,推动活塞实现线性或旋转运动。
通过控制气源装置和气动控制装置的工作状态,可以实现气缸的运动控制。
具体而言,当控制电磁阀通电时,气源装置提供压缩气体进入气缸,产生推力推动活塞运动。
当电磁阀断电时,气源装置停止供气,气缸内的气体排出,活塞则回到初始位置。
通过不同的气源装置和气动控制装置的组合,可以实现各种复杂的气动运动。
三、气动执行机构的优势与其他执行机构相比,气动执行机构具有以下几个优势:1.快速响应:气动执行机构由于使用压缩空气作为驱动力,因此其响应速度快,能够迅速启动和停止运动。
2.简单可靠:气动执行机构结构简单,组成部件少,不易出现故障,具有较高的可靠性和耐用性。
3.使用方便:气动执行机构的气源广泛,只需要接入压缩空气即可使用,非常方便。
4.防爆性能好:气动执行机构使用的是压缩空气而非电能,因此在易燃易爆环境中具有较好的安全性。
GT气动执行器 Pneumatic Actuators
下一页 返回
主要特点及标准参数:
基本设计:气动双活塞执行器、型号GT双作用式、型号GT-S
单作用式(有弹簧返回)。
制造特点:超宽面齿条(活塞)小齿轮传动技术、活塞及齿轮
和壳体接触面有低磨擦材料制成的滑动轴承衬套、导向。单作
用式有保险弹簧座。
采用标准:执行器与阀门连接:四个或八个螺栓孔符合标准
DIN/ISO5211,轴装配孔符合标准DIN3337。可供选择的装配轴
孔有多种形状尺寸选择 。
执行器与控制阀连接:GT/GT-S100~350符合标准NAMUR或
VDI/VDE3845,GT/GT-S040~90通过转接板连接。
执行器与信号盒连接:符合VDI/VDE3845
零件材料:壳体:铝合金表面阳极化处理。端盖:铝合金表面喷塑处理。活塞/齿条:铝合金。
密封O型圈:丁睛橡胶=NBR70。
轴承垫圈/导环:塑料。
工作环境温度:—20°C+90°C。
回转角度:双作用式=90°单作用式=90°、标准执行器旋转轴角度从两端可调节-5°+5°。
输出扭矩:3~10000Nm
空气压力:2~8bar,最大10bar。
附件:电磁阀、电气定位器、限位开关、气源处理三联件(有减压器、过滤器、油雾器)手操机构。
工作原理:
双作用式
压缩空气从气口(B)进入气缸两活塞(C)之间中腔时,使两活塞分离向气缸两端方向移动,两端气腔的空气通过
气口(A)排出,同时使两活塞(C)的齿条同步带动输出轴(D)(齿轮)逆时针方向旋转90度。可以从两端调整微量角度,
松动螺母(E)用内六角扳手拧动调节螺栓(F)调整所需角度 , 锁紧螺母(E)。反之压缩空气则从气口(A)进入气缸两
端气腔时,使两活塞向气缸中间方向移动,中间气腔的空气通过气口(B)排出,同时使两活塞(C)的齿条同步带动输
出轴(D)(齿轮)顺时针方向旋转90度。
单作用式(弹簧复位)
压缩空气从气口(B)进入气缸两活塞(C)之间中腔时,使两活塞分离向气缸两端方向移动,迫使两端的弹簧压
缩,两端气腔的空气通过气口(A)排出,同时使两活塞(C)的齿条同步带动输出轴(D)(齿轮)逆时针方向旋转90度。
在压缩空经过电磁阀换向后,气缸的两活塞在弹簧的弹力下向中间方向移动,中间气腔的空气从气口(B)排出,同
时使两活塞(C)的齿条同步带动输出轴(D)(齿轮)顺时针方向旋转90度。可以从两端调整微量角度,松动螺母(E)
用内六角扳手拧动调节螺栓(F)调整所需角度, 锁紧螺母(E)。
执行器的使用:
使用本执行器时,先确定阀门的扭矩,水蒸气或非润滑的介质增加25%安全值;非润滑的干气介质增加60%安
全值;非润滑用气体输送的颗粒粉料介质增加100%安全值;对于清洁、无摩擦的润滑介质增加20%安全值、然后根
据气源工作压力,查找扭矩表,可得到准确的执行器型号。
选用双作用式GT例:气源压力只有5bar,控制一个需要扭矩200N.m球阀,介质为非润滑的水蒸气,考虑到
安全因素,增加25%等于250N.m ,首先按表查找气源压力5bar ,然后沿该列垂直查找等于或相近的扭矩数据,
选272N.m ,再沿该行向左查找其型号,选择GT130型。
选用单作用式(弹簧复位)GT-S 例:气源压力只有4bar ,控制一个需要扭矩100N.m蝶阀,介质为非润滑
的干燥气体,考虑到安全因素,增加60%等于160N.m ,首先按表查找弹簧复位终点得到相近扭矩166N.m ,然后
沿该行向左查找气源压力4bar的终点扭矩196N.m ,气源压力扭矩应该大于弹簧复位扭矩,正好气源压力扭矩大
于弹簧复位扭矩,再沿该行向左查找其型号,选择GT160S型、弹簧数量10根。
解剖图及零配件:
控制系统接线图:
外形及连接尺寸图:
GT双作用式输出扭矩表 单
位 :N.m
型号
气源压力(MPa)
0.2 0.3 0.4 0.5 0.6 0.7 0.8
GT50 7.9 11.8 15.7 19.6 23.6 27.5 31.4
GT65 14.7 22.1 29.5 36.8 44.2 51.5 58.9
GT80 26.0 39.0 52.0 65.1 78.1 91.1 104
GT100 58.0 87.0 116 145 174 203 232
GT130 108 163 217 272 326 381 435
GT160 223 334 446 557 669 780 892
GT210 538 807 1075 1344 1613 1882 2151
GT255 1057 1586 2115 2644 3172 3701 4230
GT300 1656 2470 3293 4117 4940 5764 6587
GT350 2490 3735 4981 6226 7471 8717 9962
GT-S单作用式输出扭矩表
单位 :N.m
型号
弹簧
数量
空气压力(MPa)
弹簧复位
0.3 0.4 0.5
开始 终点 开始 终点 开始 终点 开始 终点
GT65S
8 15.0 7.9 22.3 15.2 27.9 19.1 14.2 7.1
10 20.6 11.7 26.2 15.5 17.8 8.9
12 18.8 8.1 21.3 10.7
GT80S
8 25.1 16.2 38.1 29.3 47.6 36.6 22.8 14.0
10 34.6 23.6 44.1 30.9 28.5 17.5
12 31.1 17.9 34.2 21.0
GT100S
8 56.1 26.5 85.1 55.5 106 69.4 60.7 31.1
10 77.3 40.3 96.8 54.2 75.9 38.9
12 69.6 25.2 91.0 46.6
OBD125S
8 101 65.7 155 120 194 150 97.7 62.2
10 140 95.7 179 125 122 77.7
12 124 71.3 146 93.2
GT160S
8 201 134 312 246 391 307 199 133
10 279 196 357 258 249 166
12 246 146 299 199
GT210S
8 465 309 734 578 917 723 497 341
10 648 454 832 599 621 427
12 563 330 745 512
GT255S
8 945 670 1474 1199 1843 1499 915 640
10 1314 970 1683 1270 1144 800
12 1154 741 1373 961
GT300S
8 1491 838 2314 1662 2893 2077 1631 979
10 2069 1254 2648 1669 2039 1223
12 1825 846 2447 1468
GT350S
8 2181 1404 3427 2650 4284 3312 2330 1554
10 3038 2067 3895 2730 2913 1942
12 2650 1484 3496 2331
执行器的重量/容量/开或闭的时间
双作用式 容量 L 重量 KG 单作用式 容量 L 重量 KG 开或闭时间 S
OBD50 0.23 1.5 OBD50S 0.12 ≥0.5
OBD65 0.46 2.0 OBD65S 0.22 3.6 ≥0.5
OBD80 0.80 3.0 OBD80S 0.38 5.5 ≥1.0
OBD100 1.60 6.0 OBD100S 0.79 10.5 ≥1.0
OBD130 3.03 9.5 OBD130S 1.46 16.2 ≥2.0
OBD160 6.10 18.0 OBD160S 3.00 30.0 ≥4.0
OBD210 15.4 33.0 OBD210S 7.10 52.8 ≥7.0
OBD255 31.1 72.0 OBD255S 14.1 112.0 ≥10.0
OBD300 45.9 102.0 OBD300S 21.3 153.0 ≥10.0
OBD350 68.5 153.0 OBD350S 32.7 222.0 ≥10.0