高层玻璃幕墙清洗机器人机械部分设计
- 格式:doc
- 大小:1.85 MB
- 文档页数:58
1 绪论1.1 高层玻璃幕墙清洗机器人研发意义随着人口规模的不断扩大,城市高层建筑越来越多。
摩天大楼逐渐成为生活中常见的一景。
由于玻璃具有采光性好、保温性好、防潮性好等诸多优点,同时,由于彩色玻璃美观大方,所以越来越多的高层建筑选择了用玻璃幕墙。
目前,我国大部分玻璃幕墙的清洗都需要依靠“蜘蛛人”来完成,但是,这种高空作业有一定的危险性。
因此,需要一个能够代替人力完成清洗任务的机器人。
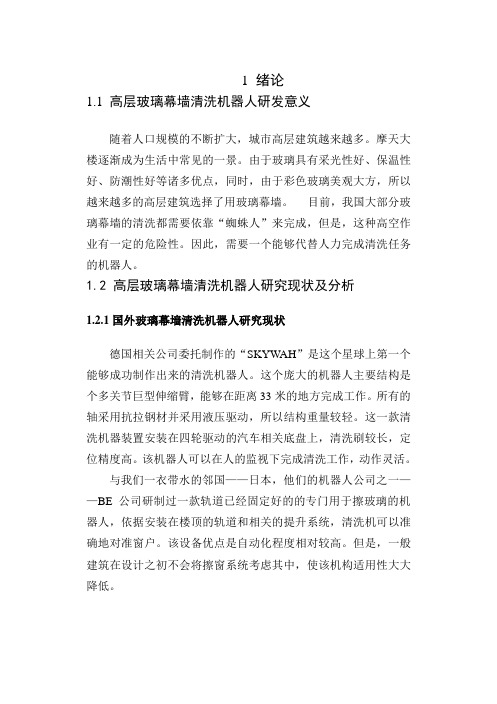
1.2 高层玻璃幕墙清洗机器人研究现状及分析1.2.1国外玻璃幕墙清洗机器人研究现状德国相关公司委托制作的“SKYWAH”是这个星球上第一个能够成功制作出来的清洗机器人。
这个庞大的机器人主要结构是个多关节巨型伸缩臂,能够在距离33米的地方完成工作。
所有的轴采用抗拉钢材并采用液压驱动,所以结构重量较轻。
这一款清洗机器装置安装在四轮驱动的汽车相关底盘上,清洗刷较长,定位精度高。
该机器人可以在人的监视下完成清洗工作,动作灵活。
与我们一衣带水的邻国——日本,他们的机器人公司之一——BE公司研制过一款轨道已经固定好的的专门用于擦玻璃的机器人,依据安装在楼顶的轨道和相关的提升系统,清洗机可以准确地对准窗户。
该设备优点是自动化程度相对较高。
但是,一般建筑在设计之初不会将擦窗系统考虑其中,使该机构适用性大大降低。
图自动清洗机-1图21-1SKYWAH德国玛歌堡的费劳恩霍费尔相关的研究所是德意志共和国主要的生产和自动化中心,它们在过去的这些年,曾经较为成功地研究了一系列清洗机器人。
该机器人可横向、可纵向,随心所欲完成清洗任务。
德国佛拉货福尔研究所研制了一种名为SIRIUSC的清洗机器人。
在那些要清洗的相关建筑物上,我们放在了上面一辆跟随及其运动的小车,这辆小车不紧急今年能够起到定位的作用,而且还能对装置起到安全保护的作用。
机器人坐竖直运动,左右移动依靠小车来完成。
美国航空航天宇航局下属的机器人公司,在上个世纪研制了爬壁机器人“Sky Washer”(用于清洗摩天大楼),它重大约四十斤,该机器人利用两组框架(L型)进行相对滑动,交替吸附来实现机器人的移动。
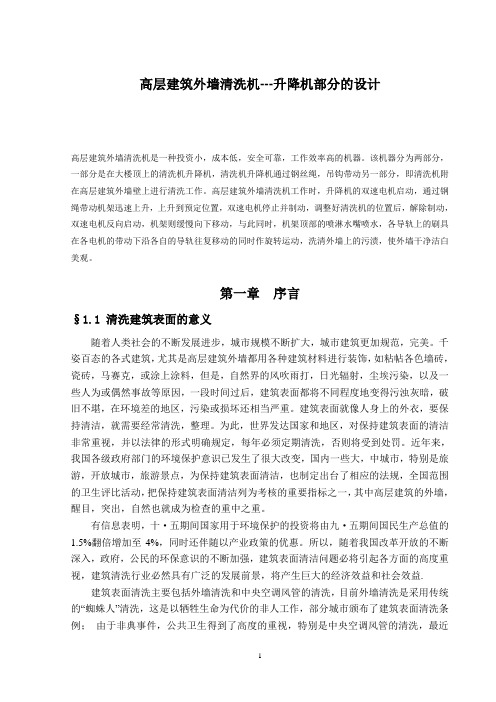
高层建筑外墙清洗机---升降机部分的设计高层建筑外墙清洗机是一种投资小,成本低,安全可靠,工作效率高的机器。
该机器分为两部分,一部分是在大楼顶上的清洗机升降机,清洗机升降机通过钢丝绳,吊钩带动另一部分,即清洗机附在高层建筑外墙壁上进行清洗工作。
高层建筑外墙清洗机工作时,升降机的双速电机启动,通过钢绳带动机架迅速上升,上升到预定位置,双速电机停止并制动,调整好清洗机的位置后,解除制动,双速电机反向启动,机架则缓慢向下移动,与此同时,机架顶部的喷淋水嘴喷水,各导轨上的刷具在各电机的带动下沿各自的导轨往复移动的同时作旋转运动,洗清外墙上的污渍,使外墙干净洁白美观。
第一章序言§1.1清洗建筑表面的意义随着人类社会的不断发展进步,城市规模不断扩大,城市建筑更加规范,完美。
千姿百态的各式建筑,尤其是高层建筑外墙都用各种建筑材料进行装饰,如粘帖各色墙砖,瓷砖,马赛克,或涂上涂料,但是,自然界的风吹雨打,日光辐射,尘埃污染,以及一些人为或偶然事故等原因,一段时间过后,建筑表面都将不同程度地变得污浊灰暗,破旧不堪,在环境差的地区,污染或损坏还相当严重。
建筑表面就像人身上的外衣,要保持清洁,就需要经常清洗,整理。
为此,世界发达国家和地区,对保持建筑表面的清洁非常重视,并以法律的形式明确规定,每年必须定期清洗,否则将受到处罚。
近年来,我国各级政府部门的环境保护意识已发生了很大改变,国内一些大,中城市,特别是旅游,开放城市,旅游景点,为保持建筑表面清洁,也制定出台了相应的法规,全国范围的卫生评比活动,把保持建筑表面清洁列为考核的重要指标之一,其中高层建筑的外墙,醒目,突出,自然也就成为检查的重中之重。
有信息表明,十·五期间国家用于环境保护的投资将由九·五期间国民生产总值的1.5%翻倍增加至4%,同时还伴随以产业政策的优惠。
所以,随着我国改革开放的不断深入,政府,公民的环保意识的不断加强,建筑表面清洁问题必将引起各方面的高度重视,建筑清洗行业必然具有广泛的发展前景,将产生巨大的经济效益和社会效益.建筑表面清洗主要包括外墙清洗和中央空调风管的清洗,目前外墙清洗是采用传统的“蜘蛛人”清洗,这是以牺牲生命为代价的非人工作,部分城市颁布了建筑表面清洗条例;由于非典事件,公共卫生得到了高度的重视,特别是中央空调风管的清洗,最近有关中央空调的清洗条例很快出台;因此对于建筑表面清洗提供一个完备的解决方案,必然打破一个传统的产业格局,改变了人们的工作方式,用机器人清洗代替传统的人工清洗或无法清洗,是必然的发展趋势。

本科毕业论文(设计)题目:玻璃外墙自动清洁机器人(验证机)学院:物理与电子科学学院专业:电子信息科学与技术诚信承诺我谨在此承诺:本人所写的毕业论文《玻璃外墙自动清洁机器人(验证机)》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名):2013 年 4 月20 日玻璃外墙自动清洁机器人(验证机)摘要:本文主要介绍了玻璃外墙自动清洁机器人的设计背景、设计思路、制作过程、工作原理、验证过程以及使用方向。
由于限于实验室条件以及对设计思路可行性的不确定性,所以决定先做一个验证机,即验证方案的可行性和对后期产品的设计提供方案。
玻璃外墙机器人在制造过程中主要使用了以下器件和材料,方管铝合金,自攻螺丝钉,铝板,DC5V步进电机,超大吸盘,微型抽气机,8mm丝杆,5mm空气导管,无线模块,5V直流电源模块,74HC595以及单片机。
玻璃外墙机器人主要是由铝合金搭建主框架,这样可以在不降低机器人强度的情况下减轻重量。
机器人铝合金结合部以铝片加自攻螺丝钉加固,运动部分使用8mm丝杆加齿轮以控制运动,动力则采用DC5V步进电机的转动带动机器人运转,在工作时,以微型抽气机抽出超大吸盘内的空气以使机器人吸在玻璃墙幕上,整个机器人使用51单片机来控制驱动,使用74HC595对单片机的I/O口进行扩展,机器人用220V交流电转5V直流电源模块供电,以确保步进电机能达到额定电流,提供强劲的动力,再用无线模块控制机器人的状态,使得机器人稳定有序的工作。
可以适合全玻璃结构的建筑体以及建筑中部分的玻璃墙面的清洁工作,它可以在无人干预的情况下完成指定玻璃墙面的清洁,替代传统的人工室外清理,。
使用玻璃外墙自动清洁机器人可以最大化的降低人的危险和劳动强度,提高工作效率,降低成本。
它还具有越障功能,对于有起伏有其他装饰材料的玻璃墙幕同样适合,同时它还能转弯,不光能垂直上下,还能向左向右移动真正做到清洁无死角。


高楼清洗机机电系统设计摘要近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文的任务就是设计一种能够在壁面上吸附行走的清洗机器人。
本文在简单介绍清洗机器人的国内外研究现状的基础上,基于二维软件CAD对四轮式风压吸附清洗机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。
本文设计的清洗机器人采用四轮式小车形状结构,结构简单;采用风压吸附方式,利用螺旋桨对空气的压缩所产生的压力将机器人压在物体表面,避免了清晰机器人对壁面的局限,降低了控制难度;清洗机主要由伺服悬吊系统、清洗主机和由计算机控制系统组成;采用无人化清洗,自动清洗,自动供水,自动供清洗液,单片机系统控制,操作人员只需通过键盘即可操纵清洗机工作,而且在清洗过程中,清洗机能够自动进行边缘识别,可根据建筑楼层的具体情况选择为纵洗或横洗;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用直齿圆柱齿轮传动装置作为减速器;采用楼顶供电;机器人可以在水平面或者垂直表面直线行走。
本机的清洗效率较高,清洗效果良好。
关键词:清洗机器人;减速器设计;风压吸附;单片机控制;齿轮机构;电机控制;刷洗;ⅠABSTRACTIn recent years, with the development of society, more and more floors, with glass curtain wall building more and more toavoid cleaning a very important issue, most of the traditional way of artificial, or a cable from the top of the building will be used under the robotic crane, low efficiency, high-risk, then cleaned with a wall-climbing robot came into being, this task is to design a walk on the adsorption to the wall climbing robot for cleaning.This paper briefly wall-climbing robot based on the research status, based on 2D software, CAD, four-wheel vacuum on wall-climbing robot body bodies were designed, carried out on some key satisfied with the design calculation and checking terms, focusing on the mobile climbing robot structure, adsorption structure and drive system design and calculation.This designed wall-climbing robot car with four-wheel-type shape of the structure, simple structure;By pressure adsorption,robot using the pressure generated by the propeller on the compressed air pressure in the surface,avoiding the clear limitations of the robot on the wall,reducing the difficulty of control;Washing machine is suspended by a servo system, cleaning host and consists of computer control system;The cleaning of the unmanned, automatic cleaning, automatic water supply for automatic washing liquid, single chip control system, operating only through the keyboard to manipulate the work of the washing machine in the cleaning process, the washing machine to automatic edge recognition, according tothe building floor wash for vertical or horizontal wash;Rear-wheel drive, a motor to drive the two rear wheels, rear wheel drive the front wheels to complete the robot to walk, use of the spur gear transmission device as reducer;Roof supply; robot walk a straight line can be horizontal or vertical surface. The higher the cleaning efficiency of the machine a good cleaning effect.Key words: Cleaning Robot;Reducer Design;PressureAdsorption Mode;MCU Control;Gear mechanism;Motor control;Scrub;目录摘要(Ⅰ)Abstract (Ⅱ)第1章绪论 (1)1.1 课题研究的目的和意义 (1)1.2 课题研究现状及分析 (1)1.2.1 国外壁面清洗机器人研究现状 (1)1.2.2 国内壁面清洗机器人研究现状 (2)1.3 高层建筑外墙清洗机发展趋势 (4)1.4 课题的研究设想 (4)第2章清洗机器人总体方案设计 (5)2.1 对楼顶楼面的实际考察 (5)2.1.1楼面结构考察 (5)2.1.2 楼顶的实际考察 (5)2.2 清洗机器人的总体方案 (6)2.3 清洗机器人清洗系统方案 (7)2.4 清洗机器人爬壁系统方案 (8)2.5 清洗机器人控制系统方案 (8)2.5.1设计的基本原则 (8)2.5.2可供选择的设计方案 (8)2.5.3方案的分析 (8)2.6 其它部分方案 (9)2.6.1材料选择 (9)2.6.2 轮的润滑问题 (9)2.6.3 轴承的润滑问题 (9)2.7 本章小结 (9)第3章清洗机器人清洗系统设计 (10)3.1 清洗机器刷洗部分设计 (10)3.1.1 盘刷设计 (10)3.1.2 滚刷设计 (11)3.1.3刷洗部分所用弹簧的设计 (11) 3.2 内空心轴设计 (12)3.3 清洗机主机滚轮的设计计算 (13) 3.4 主机上传感器及行程开关的选择 (13) 3.5复合缆的结构设计 (14)3.6 本章小结 (14)第4章清洗机器人风压系统设计 (15) 4.1 采用风压的意义 (15)4.2 基本原理 (15)4.3 气动计算的原始数据与技术要求 (15) 4.4 风压部分力学计算 (16)4.5 本章小结 (16)第5章清洗机器人主要零件设计 (18) 5.1 直齿轮副的设计计算 (18)5.1.1 齿轮的设计计算及强度校核 (18) 5.1.2 齿面接触疲劳强度计算 (20)5.1.3 齿根抗弯疲劳强度验算 (21)5.1.4 齿面静强度计算 (22)5.1.5 齿根(抗弯)静强度验算 (23) 5.2 锥齿轮副的设计计算 (24)5.2.1 基础尺寸确定 (24)5.2.2 确定载荷系数K (25)5.2.3 齿面接触疲劳强度计算 (25)5.2.4 齿根抗弯疲劳强度计算 (26)5.3 本章小结 (26)第6章清洗机器人控制系统设计 (28) 6.1 控制部分的基本组成 (28)6.2 控制部分工作原理 (29)6.3 驱动部分工作原理 (30)6.4 控制软件的实现 (30)6.4.1 主机+POD组合 (30)6.4.2 双平台 (31)6.5 软件的结构 (31)6.5.1 软件的主体结构 (31)6.5.2 软件功能模块的划分 (31)6.6 控制系统软件程序的实现 (32)6.6.1 伺服悬吊系统部分 (32)6.6.2 清洗机主机部分 (32)6.7 本章小结 (33)结论 (34)参考文献 (35)致谢 (37)附录 (38)第1章绪论1.1 课题研究的目的和意义随着城市现代化得发展和人口的日益增加,为了节省土地资源,高层建筑越来越多,各式各样的摩天大楼成为现代都市中一道亮丽的风景。

高层玻璃幕墙清扫机器人机械部分设计简介本文档旨在描述高层玻璃幕墙清扫机器人的机械部分设计。
该机器人旨在提供一种自动化的清洁解决方案,用于清扫高层建筑的玻璃幕墙表面。
设计要求1. 结构稳定性:机器人的机械结构应具备足够的稳定性,以确保在高层建筑表面操作时不会发生意外。
2. 清洁效果:机器人的设计应能够有效地清洁玻璃幕墙表面,确保清洁效果达到预期。
3. 安全性:机器人设计应考虑到操作人员和周围环境的安全性,防止意外事故的发生。
4. 可靠性:机器人的机械部分应具备足够的可靠性,以确保长时间连续运行而无需频繁维修。
机械设计方案1. 结构设计- 机器人采用轮式移动结构,以确保在玻璃幕墙表面灵活移动。
- 主要结构材料选用高强度合金材料,以提供足够的结构稳定性和耐久性。
2. 清洁装置设计- 清洁装置采用可调节压力的喷水系统,以确保在不同情况下可选择适当的清洁压力。
- 清洁装置具备自动水量控制功能,避免浪费水资源。
- 配备可更换的清洁刷头,以适应不同类型的污垢和玻璃表面。
3. 安全设计- 机器人配备多重传感器系统,用于探测周围环境并避免与障碍物碰撞。
- 设计紧急停止按钮,以便在发生紧急情况时迅速停止机器人运行。
- 紧急疏散系统的设计,用于安全疏散操作人员。
4. 可靠性设计- 机器人配备电池和供电管理系统,以确保能够持续进行长时间的清洁操作。
- 机械部分采用模块化设计,方便更换和维修损坏或老化的部件。
结论高层玻璃幕墙清扫机器人的机械部分设计考虑了结构稳定性、清洁效果、安全性和可靠性等要求。
采用了轮式移动结构、可调节压力的喷水系统、多重传感器系统等设计方案,以提供一个自动化、高效、安全、可靠的清洁解决方案。
这将有助于提高高层玻璃幕墙清洁工作的效率和安全性。
基于绳牵引的新型玻璃幕墙清洗机器人设计摘要:针对高楼玻璃幕墙清洁问题设计了一款高楼玻璃幕墙清洗机器人,该机器人具有以下功能:吸附功能、运动功能、清洗作业功能、越障功能、自主环境感知功能、自主路径规划功能,并做出样机进行相应测试。
该款产品能够实现高空玻璃幕墙的清洁任务,适用于当前高空清洗作业的市场化需求。
关键词:清洗机器人;玻璃幕墙;附着技术;绳牵引1.引言国内外已经研究了一些用于高楼玻璃幕墙清洗的爬壁机器人模型,但目前都还没有实用。
针对高楼玻璃幕墙的清洗要求和清洗作业的实际情况,在国内外壁面自主移动机器人研究的基础上,设计出一种利用可倾转旋翼控制清洁小车在玻璃表面行走,通过悬挂装置和自主行走楼顶小车连接通过无线通讯实现行走清洗功能的清洗机器人。
通过对机器人的设计,使其在高层建筑壁面清洗工作中彻底解放工人的劳动力问题,规避人工高处擦窗的危险。
实现自动化、高效率擦窗,以解决高楼玻璃幕墙难题。
2.方案设计2.1 机器人系统整体设计清洁机器人主要面对高楼玻璃幕墙,现在全玻璃幕墙、半隐框玻璃幕墙以及内部点支撑玻璃幕墙由于外观美观,使用率越来越高。
针对此类玻璃幕墙的清洗,该机器人由楼顶小车、清洁小车组成,楼顶小车通过安全悬挂装置负责清洁路线的自主规划和机器人整体的安全性,采用可调节卡槽结构,可用于不同厚度楼台;清洁小车主要负责清洁高楼玻璃幕墙,利用可倾转旋翼控制清洁小车在玻璃表面行走,通过橡胶刮和高压水射流配合完成清洗作业。
机器人系统包括运动系统,清洁系统,控制系统,系统结构简图如图1所示,机器人整体三维模型及运动状态模拟如图2所示。
图1 机器人系统结构简图图2 三维模型及运动状态模拟2.2 运动系统设计运动系统由三部分组成,分为楼顶小车、清洁小车和悬挂装置。
楼顶小车采用4轮独立驱动小车,在待清洁的玻璃幕墙楼顶楼台上进行自动行走,具有自主避障功能,实现自动控制来回往复移动。
采用4轮独立驱动,可以实现较大的转矩,当楼台具有一定坡度时可以正常行走。
玻璃清洁机器人的研发-吸附机构设计摘要本课题设计任务是设计玻璃清洁机器人的吸附机构和移动机构。
通过对市面上各种吸附机构和移动机构对比和分析。
本课题提出采用单吸盘负压吸附吸附机构和安全保护系统机构的方案。
对玻璃清洁机器人进行受力分析,分析吸盘的吸附能力和密封装置,选取单吸盘作为吸附装置,并确定叶轮驱动电机型号。
设计安全保护系统的整体架构,画出它的结构简图,并确定安全保护系统的工作流程,对小车的导轨进行有限元受力分析,选取合适的导轨型号,对吊杆进行剪力和弯矩力学分析,选取合适的吊杆型号。
参照市面上的玻璃清洁机器人外观,设计玻璃机器人外观配色。
最后用三维软件Solidwork绘制零件图和装配图,用AutoCAD修改装配图和零件图的细节。
关键词:单吸盘;力学分析;有限元;安全保护系统Research and development of glass cleaning robot-Designof adsorption mechanismAbstractThe task of this project is to design the adsorption mechanism and mobile mechanism of glass cleaning robot. Through the comparison and analysis of various adsorption mechanisms and mobile mechanisms on the market. In this paper, the scheme of using single suction cup negative pressure adsorption mechanism and safety protection system mechanism is proposed. The force of glass cleaning robot is analyzed, the adsorption capacity and sealing device of suction cup are analyzed, single suction cup is selected as the adsorption device, and the model of impeller drive motor is determined. Design the overall structure of the safety protection system, draw its structural diagram, and determine the work flow of the safety protection system, carry out the finite element stress analysis on the trolley's guide rail, select the appropriate guide rail model, carry out the shear and bending moment mechanical analysis on the suspender, and select the appropriate suspender model. According to the appearance of glass cleaning robot on the market, design the color matching of glass robot appearance.Finally, 3D software SOLIDWORK is used to draw the part drawing and assembly drawing of robot body, and AutoCAD is used to modify the details of assembly drawing and part drawing.Keywords: single suction cup; mechanical analysis; finite element; safety protection system目录1 绪论 (2)1.1研究的现状及其意义 (2)1.2 玻璃清洁机器人的研究现状 (3)1.2.1国内研究现状 (3)1.2.2国外研究现状 (4)1.3玻璃清洁机器人类型 (6)2 玻璃清洁机器人总体方案 (8)2.1机器人设计 (8)2.2机器人总体结构 (8)3 吸附机构和驱动机构 (10)3.1吸附机构设计 (10)3.1.1吸附条件分析和计算 (10)3.1.2吸附机构设计 (12)3.1.3驱动电机选择 (13)3.2移动机构设计 (15)3.2.1 机器人安全保护系统 (15)3.2.2安全保护系统工作流程 (17)3.2.3导轨选材 (17)3.2.4对导轨进行有限元分析 (19)3.2.5吊车的杆力学分析 (25)4 机器人外观 (30)5 结论 (32)参考文献 (33)附录 ................................................................................................................... 错误!未定义书签。
机 械 工 程 与 自 动 化MECHANICAL ENGINEERING & AUTOMATIONNo1Feb第1期(总第224期)2021 年2 月文章编号=672-6413(2021)01-0119-02玻璃幕墙清洁机器人的结构设计刘啥,刘元昊,陈育羽,柴瑞(哈尔滨理工大学荣成学院,山东威海264300)摘要:针对人工高空清洁玻璃幕墙产生高额成本与较高危险性等一系列问题,设计了清洁玻璃幕墙的机器人。
该机器人外形紧凑、占用空间较少,可以解决玻璃幕墙等玻璃制品的清洁问题,降低了高空玻璃清洁的危险性,减少了采用人工清洁的成本。
该机器人主要由减速装置、密封内腔装置、离心轮装置等组成。
介绍了其总体结构及各部分的结构设计,给出了该机器人的工作原理,并对机器人进行了力学平衡分析与运动分析。
设计的机器人通过离心轮旋转排出空气形成负压,达到吸附条件;由电机驱动,在双底轮加装擦布实现 清洁功能与转向功能。
关键词 : 玻璃幕墙; 清洁机器人; 结构设 计中图分类号:TP242文献标识码:A0引言在我国经济迅猛发展与城市不断扩大的今天,城 市中的高楼大厦鳞次栉比,玻璃幕墙作为一种新颖的 高端建筑墙体,是如今高层建筑的宠儿。
玻璃幕墙的广泛应用也催生了清洁困难这一显著问题,传统的人 工清洁不仅费时费力而且有很大的危险性,本文设计 的清洁机器人可以有效降低危险性和人工成本。
1清洁机器人的结构设计与分析1.1 清洁机器人结构玻璃幕墙清 洁 机 器 人 外 观 与 内 部 结 构 如 图 1 所 示, 它主要由底轮清洁装置、 减速齿轮机构、 驱动电机、 封闭式内腔、离心叶轮组成,通过负压原理实现吸附运 动,双底轮加装擦布实现清洁功能与转向功能。
机器人若要完成清洁任务,则需满足以下条件:(1) 吸附条件:真空负压产生的摩擦力要大于机 器人的自身重力 。
(2) 驱动条件:电机产生的驱动力要大于机器人 自身重力、清洁布料与玻璃面接触时所产生的滑动摩 擦力之和。
玻璃清洁机器人的设计摘要高楼玻璃幕墙清洗机器人是特种机器人的一个分支。
它是基于壁面移动机器人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,在此基础上,对机器人总体结构进行了设计分析。
其次重点介绍了机器人的驱动机构,讨论了机器人的作业路径及运动控制规划。
最后,简单介绍了机器人的擦洗机构。
关键词:玻璃,幕墙清洗机器人,驱动机构,擦洗机构,密封机构Design of glass cleaning robotABSTRACTGlass-wall cleaning robot is one of robot for limited opera tion,which can walk on Vertical glass-wall with washing devices.It is a robot with specific applied functions,Based on wall-climbing robot techniques.for specific objects.And it works on vertical Glass-wall,where is dangerous for human beings.It is a robot could conquer the gravity effect and carry cleaning equipments,facing to glass-wall surface beautifying service of modern high-rise buildings.Firstly, the whole frame of the glass wall cleaning robot is introduced, based on this, the designing and analyzing Of the structure of the robot are described in details.Then,introducing the drive mechanism of the robot,Discussed the operation of the robot path planning and motion control. Finally, a brief introduction of the robot body scrubKey words: Glass, wall cleaning robot, driving mechanism Scrub mechanism,sealing mechanism1 前言在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的风景。
1 绪论1.1 高层玻璃幕墙清洗机器人研发意义随着人口规模的不断扩大,城市高层建筑越来越多。
摩天大楼逐渐成为生活中常见的一景。
由于玻璃具有采光性好、保温性好、防潮性好等诸多优点,同时,由于彩色玻璃美观大方,所以越来越多的高层建筑选择了用玻璃幕墙。
目前,我国大部分玻璃幕墙的清洗都需要依靠“蜘蛛人”来完成,但是,这种高空作业有一定的危险性。
因此,需要一个能够代替人力完成清洗任务的机器人。
1.2 高层玻璃幕墙清洗机器人研究现状及分析1.2.1国外玻璃幕墙清洗机器人研究现状德国相关公司委托制作的“SKYWAH”是这个星球上第一个能够成功制作出来的清洗机器人。
这个庞大的机器人主要结构是个多关节巨型伸缩臂,能够在距离33米的地方完成工作。
所有的轴采用抗拉钢材并采用液压驱动,所以结构重量较轻。
这一款清洗机器装置安装在四轮驱动的汽车相关底盘上,清洗刷较长,定位精度高。
该机器人可以在人的监视下完成清洗工作,动作灵活。
与我们一衣带水的邻国——日本,他们的机器人公司之一——BE公司研制过一款轨道已经固定好的的专门用于擦玻璃的机器人,依据安装在楼顶的轨道和相关的提升系统,清洗机可以准确地对准窗户。
该设备优点是自动化程度相对较高。
但是,一般建筑在设计之初不会将擦窗系统考虑其中,使该机构适用性大大降低。
图自动清洗机-1图21-1SKYWAH德国玛歌堡的费劳恩霍费尔相关的研究所是德意志共和国主要的生产和自动化中心,它们在过去的这些年,曾经较为成功地研究了一系列清洗机器人。
该机器人可横向、可纵向,随心所欲完成清洗任务。
德国佛拉货福尔研究所研制了一种名为SIRIUSC的清洗机器人。
在那些要清洗的相关建筑物上,我们放在了上面一辆跟随及其运动的小车,这辆小车不紧急今年能够起到定位的作用,而且还能对装置起到安全保护的作用。
机器人坐竖直运动,左右移动依靠小车来完成。
美国航空航天宇航局下属的机器人公司,在上个世纪研制了爬壁机器人“Sky Washer”(用于清洗摩天大楼),它重大约四十斤,该机器人利用两组框架(L型)进行相对滑动,交替吸附来实现机器人的移动。
每组框架有三个“脚掌”(每个“脚掌”有两个吸盘)。
还有,德意志共和国、西班牙王国、大不列颠及北爱尔兰联合王国、即将举办世界杯和奥运会的巴西、位于马六甲海峡附近的新加坡、深陷战火的以色列、奥地利、澳大利亚、加拿大等国家相继进行了研究。
1.2.2 国内玻璃幕墙清洗机器人研究现状或许因为历史上的种种原因,我国在相关产业方面起步较晚,但是发展迅速。
在二十时期七十年代中期,日本相关企业来到中国进行科技展览会,川崎公司在中国第一次展出了工业机器人,从此,我国开始了机器人研制的相关研究。
上海大学自1988年起,先后进行了玻璃窗清洗机器人以及球形爬壁机器人的研究。
前者是那种质量非常大而且还缺少至关重要的清洗系统。
后者采用腿足式移动机构,足端为真空吸盘。
哈工大研发过多款爬壁机器人。
轮式负压机器人的堡垒已经被其轻松攻破。
该类机器人还设有卷扬机,地面支援小车。
柔性设计的密封款式,虽然它对壁面的适应能力远远高于其他机构,但越障能力却远远差于其他装置。
-14图高层清洗机器人图3-11-CLEANBOT1996年起,北航在国家“863”计划的资助下,先后研制了SKYCLEANWASHMAN“擦玻璃的机器人(灵、CLEANBOT、、巧款)”、“天空洁宝”、“吊篮式擦窗机器人”,前三种为十字机构移动机器人。
而进入新千年而研发的双车体机器人,但重量小得多,仅为40斤。
该机器人本体结构采用具有滑动密封负压吸附装置,能实现越障和曲面转换功能。
香港大学和内地大学合作研发的CLEANBOT-I采用北京航空航天大学的原型,CLEANBOT-II则是采用了仿照坦克的原型。
与其它相比,它采用了多个转盘的设计。
1.3 高层建筑外墙清洗机发展趋势由于清洗工作需要在墙壁上这种极其特殊的环境下进行,所以清洗爬壁机器人的总体设计要求是相当苛刻的。
总的原则为:尽可能低的重量,尽可能低的造价,尽可能高的可靠性,适应性要比较高,满足于各种墙面,当然,较高的清洗效率也是不可缺少的因素。
我们从清洗机的工作环境不难看出,发展方向可能有下面几个:首先,要适用于玻璃幕墙清洗,由于其工作条件所限制,导致它必须能够尽可能地做到结构简单,方便控制。
其次,该机器人要适用于复杂墙面,如爬楼梯,一个墙壁上有多个窗户的壁面清洗,但是,这样会对其结构,控制,运动方式等其他因素提出更高的要求,必须要求设计时能够提出更加更为复杂的设计理念。
1.4 高层建筑外墙清洗机现存问题国内外关于高层爬壁清洗机器人的设计与研究已经有数十年的进程,同时,在各种各样的机器人中,也存在着一些或个性或共性的问题。
吸附能力难以满足各种工作面的要求,在现实的清洗过程中,建筑物外墙壁可能是各种各样的材料,材料甚至非常复杂,不仅仅是一个两个材料物质,而且结构上也不是那么简单,或有沟缝,或有凸起,或有凹陷;那么我们必须解决类似于跨越,密封,移动等许多技术难题,否则极大的影响避免清洗机器人的效率。
移动的技术性和灵活性相互矛盾,在实际的清洗过程中,我们发现既要保证结构的小型化和较高的效率,还需要在具有一定负载的前提下能够自由的上下的移动,具有较强的越障能力。
控制技术与可靠性同样存在着矛盾。
控制需要电源线和通讯线,但是这些存在大大影响了机器人的灵活性和控制机器人的工作完整性,而如果去掉机器人电源线和通讯线的话,又会对自己的控制造成不良影响。
清洗机构与机器人负重的矛盾。
设计的安全性,清洗机构和污水再利用,我们能够识别清洗质量,但是如果机构设计不合理,过高的增添成本,反而会造成一种得不偿失。
1.5 高层建筑外墙清洗机课题提出考虑到以上高楼爬壁清洗机器人所包含的那么多问题,我们所设计的清洗机构不仅仅要满足壁面的清洗工作,还要思考一下水源,清洗的刷子,清洗专用液以及相关气动装置。
所以我们要努力地在设计的灵活性和功能的合理性中间找到一个点。
在移动的过程中,为了要克服重力并且灵活移动,我要尽可能采用轻质材料,尽可能地采取一种方便控制和吸附的移动机构,并尽量利用新型能源材料的开发和无线通讯技术来实现对机器人的自动控制,尽可能是机器人更加智能化、通用化、使其成为一条产业链。
2 机械部分设计2.1设计任务根据清洗机器人清洗作业的要求,在完成一列玻璃的清洗后,需要进行提升,因此清洗机器人系统应该包括机器人清洗部分、吸附部分、提升部分、驱动部分和控制系统四大部分。
2.2清洗系统部分设计2.2.1盘刷设计盘刷具有弹性和刚度,可保证能够承载一定的压紧力来清洗墙面。
只有受了力墙面清晰的才算干净,同时若墙面有障碍物,塑料毛有一定的弹性来完成退让相关障碍物,盘刷与联刷体可通过螺栓来装配衔接的。
刷子半径=刷子R 214mm ;有毛半径=有效R 208mm ;刷毛长度=刷毛L 50mm 。
2.2.2滚刷设计滚刷的内层筒壁为尼龙,在上面穿制猪鬃,在筒的两侧安装上轴的端部,起到支撑作用并且和V 带相联接。
滚刷需要通过障碍物需要依靠鬃毛的变形,所以长度不宜过小,根据实际经验,选择60mmm 为佳。
设计参数为:滚刷宽度mm 1000L =刷宽刷毛长度mm 60L =刷毛鬃毛螺旋穿制可以方便引流,采用一软一硬的猪鬃对称滚筒中心人字形缠绕。
选择螺旋升角φ为15°,则有如下关系:()()mm d P m 09.4215tan 50tan 0=︒⨯⨯==πφπ式中:0d - 滚刷穿制直径(mm );m P - 鬃毛螺旋导程(mm )。
鬃毛根据自然膨胀效应会成倒圆锥,由经验可知︒=5γ,那么一个尖端的实际直径为:()()mm d h d 6.1645tan 602tan 212=+︒⨯⨯=+⨯⨯=φ式中:h - 鬃毛的长度(mm ); 1d - 鬃毛穿制孔直径(mm)。
滚刷边缘与鬃毛束的距离t 为:mm mm d P t m 4.445.46.16209.4222≈=-=-= 5mm 的间隙既能对清洗液完成引流,还能有效地完成清洗壁面的工作。
实际穿制滚刷时,选取导程=m P 42mm ,圈数为:486.472110002≈===m m P L n 滚刷转速直接影响到清洗速度和效果。
为保证清洗机正常运动,需使滚刷转速和移动速度相匹配,使玻璃和滚刷之间产生相对滑动,从而减少磨损。
清洗机正常运动速度3m/min ,估算转速为:Rv k n ⨯⨯⨯=π30 式中:n- 滚刷转速(r/min );v- 清洗机移动速度(m/s );k- 刷洗系数;R- 滚刷半径(m )。
取k=5:min /r 28085.005.053030=⨯⨯⨯=⨯⨯⨯=ππR v k n2.2.3电机的选用下面对驱动力矩和功率需求进行计算:1)滚刷所需力矩为:R N M ⋅⋅=μ滚式中:-μ滚刷鬃毛与壁面摩擦因数N- 壁面与滚刷间作用力R- 滚刷半径根据相关经验,μ在0.45—0.68之间变化,取μ=0.5;N 的结果与鬃毛变形量有关,当变形量为5mm 时,F=50.25±0.23N ;当变形量为10mm 时。
F=139.64±0.11N 。
故取N=140NR N M ⋅⋅=μ滚=0.5⨯140⨯0.085=6N ²m2)盘刷所需力矩为:N r M ⋅⋅=μ盘式中:μ-刷毛与壁面摩擦因数(取0.15)r -盘刷半径m N r M ⋅=⨯⨯=⋅⋅=N 2.41402.015.0μ盘所需总转矩为m N M M M ⋅=+=4.2022滚盘总3)所需功率的计算w w w M k P 179.58467.024.203=⨯⨯⨯=⨯⨯=π根据刷洗力矩,我们选择Y2-802-6电机,相关参数如下: 额定功率550W 转速900r/min 平键4³20 力矩m N ⋅3502.2.3盘刷弹簧的选用1)弹簧的种类:圆柱螺旋压缩弹簧;2) 弹簧的材料:碳素弹簧钢;3)弹簧的设计计算弹簧的工作圈数(根据《机械设计手册》第三卷):mm N N 5.65.11=+=弹簧丝直径(根据《机械设计手册》第三卷):mm 53.D =,允许极限负荷下的单圈变形:N 75.13=F单圈刚度:mm N P /3331=弹簧节距:25.T =最大工作载荷:N P 4602=极限工作载荷:N P 5753=弹簧每圈展开长度:mm L 52=计算数据如下: 名称公式 数据(mm ) 弹簧中径d D D -=2 16.5 弹簧内径d D D ⨯-=21 13 弹簧间隙d t δ-= 1.7 弹簧总展开长度n L ⨯=1 260 螺旋角 α 7°弹簧自由高度d )(n n δH ⨯++⨯=1134.75 极限负载弹簧高度33F H H -= 26.1 弹簧旋向 左旋右旋均可2.2.4锥齿轮的设计计算和相关校核锥齿轮选用直齿锥齿轮,我们设计的相关参数: 名称系数 齿形角α20° 齿顶高系数*a h =1 顶隙系数*c =0.2 螺旋角β=0° 周交角 90°根据《机械设计手册(第五版)》第三卷表14-3-5,选择大端端面模数5.2=m 。