某型充饱和蒸气式温度传感器中焊接波纹管的设计思路及方法
- 格式:pdf
- 大小:252.01 KB
- 文档页数:3
资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载某年特种设备无损检测UTⅢ级专业应用知识模拟题地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容2006年度特种设备无损检测UTⅢ级专业应用知识模拟题(开卷)是非题(正确划“O”,错误划“×”,每题2分,共30分)1.JB/T4730-2005《承压设备无损检测》规定:当采用未列入JB/T4730规定的检测方法对金属结构件进行检测时,使用该技术进行检测的单位应向全国压力容器标准化技术委员会提交有关技术资料,经评审形成标准案例。
(×)2.JB/T4730-2005《承压设备无损检测》规定:承压设备的制造、安装和在用检验中,超声波检测的检测时机及抽检率的选择等应按相关法规、标准及有关技术文件的规定。
(×)3. JB/T4730-2005《承压设备无损检测》规定:系统校正应在标准试块上进行,校准中应使探头主声束垂直对准反射体的反射面,以获得稳定和最大的反射信号。
(O)4. JB/T4730-2005《承压设备无损检测》规定:对厚600mm锻件超声波探伤,大平底B1和B2回波高分别为满幅的80%和30%,则其材质衰减系数不应考虑修正。
(O)5.根据JB/T4730-2005《承压设备无损检测》规定:对焊缝进行C级检测时,若斜探头扫查母材区用直探头检测缺陷波高比无缺陷处第二次底波低10dB,则应在工件表面作出标记,并予以记录。
(O)6.对δ=16mm的铝焊缝进行检测,发现缺陷A波高为φ2mm-10dB,缺陷指示长度为8mm,缺陷B波高为φ2mm-8dB,指示长度为12mm,该两缺陷在一直线上,其间距为6mm,则按JB/T4730-2005《承压设备无损检测》规定评定,该焊缝中缺陷指示长度为20mm,应评为Ⅲ级。

安装方法对热电阻的安装,应注意有利于测温准确,安全可靠及维修方便,而且不影响设备运行和生产操作。
要满足以上要求,在选择对热电阻的安装部位和插入深度时要注意以下几点:1、为了使热电阻的测量端与被测介质之间有充分的热交换,应合理选择测点位置,尽量避免在阀门,弯头及管道和设备的死角附近装设热电阻。
2、带有保护套管的热电阻有传热和散热损失,为了减少测量误差,热电偶和热电阻应该有足够的插入深度:1)对于测量管道中心流体温度的热电阻,一般都应将其测量端插入到管道中心处(垂直安装或倾斜安装)。
如被测流体的管道直径是200毫米,那热电阻插入深度应选择100毫米;2)对于高温高压和高速流体的温度测量(如主蒸汽温度),为了减小保护套对流体的阻力和防止保护套在流体作用下发生断裂,可采取保护管浅插方式或采用热套式热电阻。
浅插式的热电阻保护套管,其插入主蒸汽管道的深度应不小于75mm;热套式热电阻的标准插入深度为100mm。
3)假如需要测量是烟道内烟气的温度,尽管烟道直径为4m,热电阻插入深度1m即可。
4)当测量原件插入深度超过1m时,应尽可能垂直安装,或加装支撑架和保护套管。
安装注意1、热电阻应尽量垂直装在水平或垂直管道上,安装时应有保护套管,以方便检修和更换。
2、测量管道内温度时,元件长度应在管道中心线上(即保护管插入深度应为管径的一半)。
3、温度动圈表安装时,开孔尺寸要合适,安装要美观大方。
4、高温区使用耐高温电缆或耐高温补偿线。
5、要根据不同的温度选择不同的测量元件。
一般测量温度小于400℃时选择热电阻。
6、接线要合理美观,表针指示要正确。
主要区别热电偶与热电阻均属于温度测量中的接触式测温,尽管其作用相同都是测量物体的温度,但是他们的原理与特点却不尽相同。
热电偶是温度测量中应用最广泛的温,他的主要特点就是测温范围宽,性能比较稳定,同时结构简单,动态响应好,更能够远传4-20mA电信号,便于自动控制和集中控制。
热电偶的测温原理是基于热电效应。


《传感器技术与应用第3版》习题参考答案习题11.什么叫传感器?它由哪几部分组成?答:传感器是能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置。
传感器通常由敏感元件和转换元件组成。
其中敏感元件是指传感器中能直接感受或响应被测量的部分;转换元件是指传感器中能将敏感元件感受或响应的被测量转换成适于传输或测量的电信号部分。
2. 传感器在自动测控系统中起什么作用?答:自动检测和自动控制技术是人们对事物的规律定性了解、定量分析预期效果所从事的一系列技术措施。
自动测控系统是完成这一系列技术措施之一的装置。
一个完整的自动测控系统,一般由传感器、测量电路、显示记录装置或调节执行装置、电源四部分组成。
传感器的作用是对通常是非电量的原始信息进行精确可靠的捕获和转换为电量,提供给测量电路处理。
3. 传感器分类有哪几种?各有什么优、缺点?答:传感器有许多分类方法,但常用的分类方法有两种,一种是按被测输入量来分,如温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等;另一种是按传感器的工作原理来分,如电学式传感器、磁学式传感器、光电式传感器、电势型传感器、电荷传感器、半导体传感器、谐振式传感器、电化学式传感器等。
还有按能量的关系分类,即将传感器分为有源传感器和无源传感器;按输出信号的性质分类,即将传感器分为模拟式传感器和数字式传感器。
按被测输入量分类的优点是比较明确地表达了传感器的用途,便于使用者根据其用途选用;缺点是没有区分每种传感器在转换机理上有何共性和差异,不便使用者掌握其基本原理及分析方法。
按工作原理分类的优点是对传感器的工作原理比较清楚,有利于专业人员对传感器的深入研究分析;缺点是不便于使用者根据用途选用。
4. 什么是传感器的静态特性?它由哪些技术指标描述?答:传感器测量静态量时表现的输入、输出量的对应关系为静态特性。
它有线性度、灵敏度、重复性、迟滞现象、分辨力、稳定性、漂移等技术指标。
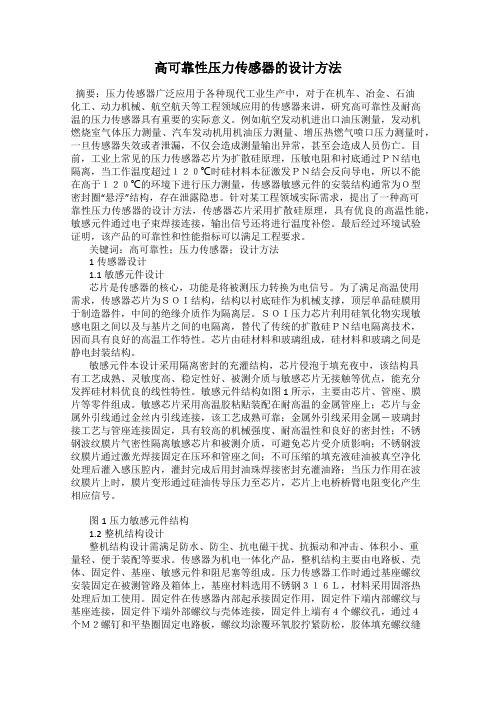
高可靠性压力传感器的设计方法摘要:压力传感器广泛应用于各种现代工业生产中,对于在机车、冶金、石油化工、动力机械、航空航天等工程领域应用的传感器来讲,研究高可靠性及耐高温的压力传感器具有重要的实际意义。
例如航空发动机进出口油压测量,发动机燃烧室气体压力测量、汽车发动机用机油压力测量、增压热燃气喷口压力测量时,一旦传感器失效或者泄漏,不仅会造成测量输出异常,甚至会造成人员伤亡。
目前,工业上常见的压力传感器芯片为扩散硅原理,压敏电阻和衬底通过PN结电隔离,当工作温度超过120℃时硅材料本征激发PN结会反向导电,所以不能在高于120℃的环境下进行压力测量,传感器敏感元件的安装结构通常为O型密封圈“悬浮”结构,存在泄露隐患。
针对某工程领域实际需求,提出了一种高可靠性压力传感器的设计方法,传感器芯片采用扩散硅原理,具有优良的高温性能,敏感元件通过电子束焊接连接,输出信号还将进行温度补偿。
最后经过环境试验证明,该产品的可靠性和性能指标可以满足工程要求。
关键词:高可靠性;压力传感器;设计方法1传感器设计1.1敏感元件设计芯片是传感器的核心,功能是将被测压力转换为电信号。
为了满足高温使用需求,传感器芯片为SOI结构,结构以衬底硅作为机械支撑,顶层单晶硅膜用于制造器件,中间的绝缘介质作为隔离层。
SOI压力芯片利用硅氧化物实现敏感电阻之间以及与基片之间的电隔离,替代了传统的扩散硅PN结电隔离技术,因而具有良好的高温工作特性。
芯片由硅材料和玻璃组成,硅材料和玻璃之间是静电封装结构。
敏感元件本设计采用隔离密封的充灌结构,芯片侵泡于填充夜中,该结构具有工艺成熟、灵敏度高、稳定性好、被测介质与敏感芯片无接触等优点,能充分发挥硅材料优良的线性特性。
敏感元件结构如图1所示,主要由芯片、管座、膜片等零件组成。
敏感芯片采用高温胶粘贴装配在耐高温的金属管座上;芯片与金属外引线通过金丝内引线连接,该工艺成熟可靠;金属外引线采用金属-玻璃封接工艺与管座连接固定,具有较高的机械强度、耐高温性和良好的密封性;不锈钢波纹膜片气密性隔离敏感芯片和被测介质,可避免芯片受介质影响;不锈钢波纹膜片通过激光焊接固定在压环和管座之间;不可压缩的填充液硅油被真空净化处理后灌入感压腔内,灌封完成后用封油珠焊接密封充灌油路;当压力作用在波纹膜片上时,膜片变形通过硅油传导压力至芯片,芯片上电桥桥臂电阻变化产生相应信号。
毕业设计(论文)-基于AT89C52单片机的烟雾检测火灾自动报警摘要近年来全国火灾事故频繁发生,造成人、财、物的巨大损失。
以前,火灾的报警和控制都很落后,造成了巨大的损失。
现在,用户对火灾报警以至自动消防系统的要求越来越高,对火灾预防的意识也越来越强烈。
因此,对火灾的报警系统是很重要的。
在硬件设计方面,本论文选用MQ-2型半导体可燃气体敏感元件烟雾传感器实现烟雾的检测,DS18B20温度传感器实现温度检测,A/D转换器实现模拟信号转换成数字信号,外加声光报警电路。
外围设备,结合单片机AD89C52芯片控制电路,实现报警提示。
软件方面,设计了烟雾检测以及温度检测的数据采集子程序,声光报警模块程序等。
以AT89C52单片机和MQ-2型半导体电阻式烟雾传感器及数字式温度传感器为核心设计的火灾报警器可实现声光报障自诊断、报警限设置、延时报警及等功能。
是一种结构简单、性能稳定、使用方便、价格低廉、智能化的烟雾报警器,具有一定的实用价值。
关键词: 报警器烟雾传感器温度传感器IAbstractIn recent years, the national fire accident occurred frequently caused by human, financial, material great loss. Previously, fire alarm and control is very backward, caused great loss. Now, the user to the fire alarm and automatic fire system requirements more and more high, tofire prevention awareness is increasingly strong. Therefore, the fire alarm system is very important.In terms of hardware design, this paper selects MQ - type 2 semiconductor combustible gas sensitive components smoke sensor realize smoke detection, DS1820 temperature sensor realize temperature detection, A/D converter simulating signal converted into digital signals, plus the acousto-optic alarm circuit. Peripherals, combined with single-chip microcomputer AD89C52 chip control circuit, realize alarm prompt.Software, design the smoke detection and temperature testing data acquisition subroutine, sound-light alarm module procedures, etc. By single chip computer and MQ - type 2 semiconductor resistive smokeAT89C52sensor and digital temperature sensor as the core design can realize the smoke alarm sound the alarm limit BaoZhang since diagnosis, set, delay alarm and etc. Function. Is a kind of simple structure, stable performance, easy to use, inexpensive and intelligent smog announciator, has certain practical value.Key words: Alarm smoke sensor temperature sensorII目录第1章绪论 ........................................................1 1.1 课题研究的目的和意义 (1)1.2 国内外研究现状 .............................................. 2 1.3 本文的主要内容 . (3)第2章火灾报警器系统总体设计 .......................................4组成 .................................................... 4 2.1 系统2.2 系统控制方案设计 (4)2.3 系统总体方案设计 (5)2.3.1 系统控制器的选择 (5)2.3.2 检测元件的选择 (7)2.3.3 输入通道方案选择 (10)2.3.4 外围设备的选择 (10)第3章系统硬件设计 ................................................14 3.1 控制单元电路设计 (14)3.1.1 引脚特性 (14)3.1.2 晶振电路设计 (17)3.1.3 复位电路设计 (18)3.1.4 单片机最小系统概述及原理图 ............................ 19 3.2 信号检测电路设计 . (20)3.2.1 烟雾报警器模块 (20)3.2.1 温度报警器模块 ........................................ 24 3.3 前向通道电路设计 . (29)3.3.1 ADC0809芯片的基本知识 (29)3.3.2 ADC0809引脚结构 (29)III3.3.3 主要特性 (31)3.3.4 ADC0809的工作原理简介 (31)3.3.5 ADC0809应用说明 (33)3.4 控制电路设计 (34)3.5 后向通道电路设计 (35)3.5.1 报警电路模块 (35)3.5.2 光报警 (35)3.5.3 声报警 ................................................. 36 第4章系统软件设计 (37)4.1 总体设计思想 (37)4.1.1 系统工作原理 (37)4.1.2 程序设计方法选择 (38)4.2 主程序设计 (41)4.2.1 主程序设计及流程图 (41)4.2.2 主程序初始化流程图 (43)4.2.3 中位值平均滤波法数字滤波子程序设计及流程图 (44)4.2.4 插值法线性化处理子程序设计及流程图 (45)4.2.5 报警子程序设计及流程图 ................................ 48 第5章总结 ...................................................... 50 致谢 ............................................ 错误~未定义书签。
传热学典型习题详解绪论部分一、基本概念主要包括导热、对流换热、辐射换热的特点及热传递方式辨析。
1、冬天,经过在白天太阳底下晒过的棉被,晚上盖起来感到很暖和,并且经过拍打以后,效果更加明显。
试解释原因。
答:棉被经过晾晒以后,可使棉花的空隙里进人更多的空气。
而空气在狭小的棉絮空间里的热量传递方式主要是导热,由于空气的导热系数较小(20℃,1.01325×105Pa 时,空气导热系数为0.0259W/(m ·K),具有良好的保温性能。
而经过拍打的棉被可以让更多的空气进入,因而效果更明显。
2、夏季在维持20℃的室内工作,穿单衣感到舒适,而冬季在保持22℃的室内工作时,却必须穿绒衣才觉得舒服。
试从传热的观点分析原因。
答:首先,冬季和夏季的最大区别是室外温度的不同。
夏季室外温度比室内气温高,因此通过墙壁的热量传递方向是出室外传向室内。
而冬季室外气温比室内低,通过墙壁的热量传递方向是由室内传向室外。
因此冬季和夏季墙壁内表面温度不同,夏季高而冬季低。
因此,尽管冬季室内温度(22℃)比夏季略高(20℃),但人体在冬季通过辐射与墙壁的散热比夏季高很多。
根据上题人体对冷感的感受主要是散热量的原理,在冬季散热量大,因此要穿厚一些的绒衣。
3、试分析室内暖气片的散热过程,各环节有哪些热量传递方式?以暖气片管内走热水为例。
答:有以下换热环节及热传递方式(1)由热水到暖气片管到内壁,热传递方式是对流换热(强制对流); (2)由暖气片管道内壁至外壁,热传递方式为导热;(3)由暖气片外壁至室内环境和空气,热传递方式有辐射换热和对流换热。
4、冬季晴朗的夜晚,测得室外空气温度t 高于0℃,有人却发现地面上结有—层簿冰,试解释原因(若不考虑水表面的蒸发)。
解:如图所示。
假定地面温度为了T e ,太空温度为T sky ,设过程已达稳态,空气与地面的表面传热系数为h ,地球表面近似看成温度为T c 的黑体,太空可看成温度为T sky 的黑体。
第1章绪论1.1传感器的概述1.1.1 传感器的定义传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
它是实现自动检测和自动控制的首要环节。
1.1.2 传感器的分类传感器分类方法很多,常用的有2种:一种是按被测的参数分,另一种是按变换原理来分。
通常按被测的参数来分类,可分为热工参数:温度、比热、压力、流量、液位等;机械量参数:位移、力、加速度、重量等;物性参数:比重、浓度、算监度等;状态量参数:颜色、裂纹、磨损等。
温度传感器属于热工参数。
温度传感器按传感器于被测介质的接触方式可分为2大类:一类是接触式温度传感器,一类是非接触式温度传感器,接触式温度传感器的测温元件与被测对象要有良好的热接触,通过热传导及对流原理达到热平衡,这时的示值即为被测对象的温度。
这种测温方法精度比较高,并在一定程度上还可测量物体内部的温度分布,但对于运动的、热容量比较小的、或对感温元件有腐蚀作用的对象,这种方法将会产生很大的误差。
非接触测温的测温元件与被测对象互不接触。
目前最常用的是辐射热交换原理。
此种测温方法的主要特点是可测量运动状态的小目标及热容量小或变化迅速的对象,也可测温度场的温度分布,但受环境的影响比较大。
1.1.3传感器的应用人们为了从外界获取信息,必须借助于感觉器官。
而单靠人们自身的感觉器官,在研究自然现象和规律以及生产活动中它们的功能就远远不够了。
为适应这种情况,就需要传感器。
因此可以说,传感器是人类五官的延长,又称之为电五官。
新技术革命的到来,世界开始进入信息时代。
在利用信息的过程中,首先要解决的就是要获取准确可靠的信息,而传感器是获取自然和生产领域中信息的主要途径与手段。
在现代工业生产尤其是自动化生产过程中,要用各种传感器来监视和控制生产过程中的各个参数,使设备工作在正常状态或最佳状态,并使产品达到最好的质量。
2015年第12期 (总第327期) 中闽高新技拳企l业
l c¨lⅡ^nI c" H E I t; NO.12.2015
(CumulativetyNO.327)
某型充饱和蒸气式温度传感器中 焊接波纹管的设计思路及方法
申杰毛慧卿 (太原航空仪表有限公司敏感元件研究所,山西太原030006)
摘要:在发动机燃油调节系统、飞机防冰系统,充液(充气)式温度传感器都是重要的元件。充液(充气)式温 度传感器通过内部充灌的感温介质感受温度变化后输出相应的位移。从而实现其调节功能或对其他元器件的控 制。文章阐述了某型充饱和蒸气式温度传感器中焊接波纹管的设计思路及方法。 关键词:充饱和蒸气式温度传感器;焊接波纹管;设计思路;感温介质;弹性元件 文剖c{示识码:A 中图分类号:TP212 文章编号:1009—2374(2015)12—0019—03 DOI:10.13535/j.cnki.11-4406/n.2015.12.010
充液(充气)式温度传感器是向产品内部充灌感温 介质,当感温介质感受温度体积发生变化后,通过弹性 元件输出相应位移。 充液式温度传感器感温介质在工作温度范围内不会 发生相态变化,受介质本身体膨胀系数的限制,输出 位移通常较小,如某型充液式温度传感器,在一2O℃至 50℃的温度变化范围内,位移仅有0.4mm左右。如需较 大的位移,则必须有专用的感温介质存储端,必要时还 要改变输出端的内部结构,如增加工艺凸台。图1中的 充液式传感器就是一个大位移(2.7mm±0.3mm),且有 输出端设有工艺凸台的产品。 — 一 \ 知删———删超 === 一 p ——— 图1 某型充液式温度传感器 充液式温度传感器除与充气式温度传感器一样有结 构简单、工作可靠的优点,其工艺性要优于充气式温度 传感器,主要是由于充气式温度传感器在充灌时感温介 质为气态或气液共存状态,因此对整体充灌装置、温度 传感器本身以及封口工艺的气密性要求较高。 充气式温度传感器在制造工艺流程上与充液式温度 传感器基本相同,只是由于充灌介质的不同,又分为充 气式温度传感器和充饱和蒸气式温度传感器。充气式温 度传感器采用惰性气体作为感温介质,如氦气、氮气。 充饱和蒸气式温度传感器则采用易挥发性的介质,如甲 苯、乙醇等。此类温度传感器较充液式温度传感器测温 范围广,当感温介质在工作温度范围内不发生相态转换 时,其位移输出量与充液式温度传感器并无太大差异, 但当感温介质在工作温度范围发生相态转换时,即发生 气一液转换,在温度传感器同等体积的前提下,其位移 量将成倍增长。 如图2所示的某型充饱和蒸气式温度传感器,采用 的感温介质在工作温度范围会发生气一液两种相态的转 换。该温度传感器体积与图1所示充液式温度传感器的 输出端大小接近,但位移输出量达到了2mm±0.1mm。某 型充饱和蒸气式温度传感器的位移输出端和感温介质存 储端是一体的,这并不是此类传感器所特有的,充液式 温度传感器同样也可以采用这种结构,具体采用何种结 构主要决定于温度传感器安装结构和位移的需求。 在某型充饱和蒸气式温度传感器试制成功以前,此 类温度传感器在国内航空机载设备中尚未见采用,也未 有对其焊接波纹管设计思路及方法的系统阐述。
图2某型温度传感器 1膜片波纹型面的选择 图2所示的充饱和蒸气式温度传感器的位移输出端 (感温介质存储端)主要由焊接波纹管构成,而焊接波 纹管则是通过焊接膜片的内、外圆后形成的一个气密腔 体。表1向我们提供了不同的膜片波纹型面其刚度、耐 压能力以及单位长度内行程的一个定性信息。从表1中 我们可以看出,膜片的波纹型面对焊接波纹管的刚度、 耐压能力以及单位长度内的行程都有着重要的影响,直 接影响到充饱和蒸气式温度传感器的位移输出和可靠 性。因此,在设计初期选择膜片波纹型面时要结合充饱 和蒸气式温度传感器的输出位移要求、感温介质的充灌
.19. 压力、工作温度范围等因素综合考虑,对膜片型面的选 择方向做一个定性。以某型充饱和蒸气式温度传感器为 例,其要求在一20℃至13℃产生2mm±0.1mm的位移,如 果在体积相同的情况下,采用充液式温度传感器,在如 此小的温度范围内是无法满足位移要求的。 根据需要,某型充饱和蒸气式温度传感器采用了可 以在工作温度范围内发生气一液相态转换的感温介质氟 利昂R410,在常温2O℃充灌时,饱和蒸气压力可以达到 约1.5MPa,因此我们选用耐压能力适中,但单位长度内 行程较大的集合型膜片。 表1 常见焊接波纹管膜片型面的基本性能比较 2焊接波纹管刚度的计算 当焊接波纹管的膜片型面选定以后,我们可以依照 刚度计算公式对焊接波纹管的刚度进行计算: (1) 式中: K一一波纹管刚度 一K 无量纲刚度 n一一圆周率 E一一材料弹性模量 h一一膜片厚度 n一一膜片数 R一一波纹管外半径 其中 是需要通过查不同膜片型面的曲线图来确 定。以某型充饱和蒸气式温度传感器的集合型膜片为 例,当膜片波纹型面确定后,我们可以根据波纹管外半 径R和波纹管内半径r的比值R/r,得到波深系数k的值, 然后在集合型膜片曲线图(见图3)的横坐标上查到该 2O一 图3集合型膜片曲线图 值。再根据膜片高度H与厚度h的比值H/h,找到相应的 值曲线,从该曲线与k值的交点沿横坐标平行画一条直 线,与纵坐标的交点就是我们需要的值。 弹性模量E也需要根据不同的材料查阅资料获得, 但膜片材料的选定一般是根据产品的使用环境(如温 度、介质)或其他使用条件来确定。 其余变量h、n、R在下节感温介质工作压力与焊接 波纹管刚度的匹配计算中进行讨论。
3感温介质工作压力与焊接波纹管刚度的匹 配方法及设计要点 当充饱和蒸气式温度传感器工作时,其充灌的感温 介质在最高工作温度和最低工作温度时分别有一个压力 值,这两个压力作用在焊接波纹管上,会得到两个集中 力值,这两个集中力内的范围就是我们合理配置其他变 量的范围。简而言之,感温介质工作压力与焊接波纹管 刚度的匹配计算,其实就是一个力平衡的计算,计算公 式如下: PoAo:F—KL (2) 式中: P 一一感温介质充灌压力 A。一一有效面积,A。=f。R2,f。为无量纲有效面积 F一一预加载荷(通常为给定值) K一一波纹管刚度 L一一压缩位移,L=L 一L。,L 为波纹管自由长度,L 为输出位移 注:某型充饱和蒸气式温度传感器在最低工作温度 时,焊接波纹管为完全压并状态;在最高工作温度时, 焊接波纹管为部分压缩状态。 3.1 部分变量的确定方法 其中f。仍需要借助膜片曲线图来确定,方法同值的 确定方法类似,根据波纹管外半径R和波纹管内半径r的 比值R/r,得到波深系数k的值,然后在膜片曲线图(见 图3)的横坐标上查到该值。再根据膜片高度H与厚度h 的比值H/h,找到相应的f。值曲线,沿该曲线与k值的交 点与横坐标平行画一条直线,与纵坐标f 的交点就是我 们需要的f 值。 P。值则需要借助感温介质的压一焓图进行确定,压一 焓图是以绝对压力为纵坐标,比焓值为横坐标的热力 图,在图上可以查到该介质的不同状态的压力值、温度 值、熵值、比焓值、比容值和干度值。但对本文所讨论 的内容,我们只需看温度和压力的对应关系即可。 我们以某型充饱和蒸气式温度传感器所用的感温介 质R410一a为例,其压一焓图如图4所示。在压一焓图上, 我们先找到某型充饱和蒸气式温度传感器最高工作温度 13℃和最低工作温度一20 ̄C这两个温度点,从这两个温 度点沿横坐标分别画一条横线,与纵坐标压力的交点就 是该感温介质在这两个温度下的饱和蒸气压力,这时我 们可以看出在这两个温度下感温介质R410一a对应的饱和 蒸气压力分别约为1.2MPa ̄IO.6MPa。 ………… , 等 一 … 图4 R41 O-a压一焓图 在得到这两个温度下感温介质R410对应的饱和蒸气 压力值后,从式(2)中我们可以看出,变量只剩下波 纹管外半径R,波纹管内半径r,膜片高度H,膜片厚度h 和膜片数n。 波纹管外半径R通常意义下与用户的使用要求有 关,如安装尺寸,因此用户一般会给定一个值或一个 范围,这样我们就得到一个R的定值或在范围内选定一 个值。 当R值确定以后,我们就可以通过式(2)确定出该 某型充饱和蒸气式温度传感器在最高工作温度13 ̄C和最 低工作温度一20℃时所能产生的集中力范围。. 在这个范围内我们可以对剩余的变量r、h、n、H进 行合理的配置,方法与充液式温度传感器类似,主要是 配置过程中考虑加工的工艺性和经济性。如厚度h,其 值越小,刚度K值则越小,但我们不能为了寻求小的刚 度值,而不断降低厚度h的值,这样会大大增加冷轧工 艺上的难度,同时由于冷轧次数的增加,成本也会大幅 攀升。 3.2设计要点 当充饱和蒸气式温度传感器充灌的感温介质在常温 下是高压的气体或气液共存体时,就会存在极高的泄漏 风险。 仍以某型充饱和蒸气式温度传感器为例,最初设计 采用0.07mm厚度膜片,目的在于保证焊接波纹管刚度 的同时,减少焊接工序。但常温下该感温介质充灌压力 为1.4MPa,充灌完毕后,当天测试该温度传感器性能良 好,满足产品的性能要求。经过一周的存放,再次测试 时发现该充饱和蒸气式温度传感器的总位移已经下降至 原测试数据的70%,说明充饱和蒸气式温度传感器已经 发生了泄漏。后经理化分析,膜片材料最终状态的平均 晶粒度为30 m,也就是说在单个膜片厚度上只有约2个 晶粒,在高压条件下,致使感温介质沿晶间泄漏。后将 膜片厚度加至0.1mm,单个膜片厚度约有3个晶粒,经存 放后证明,此时的泄漏率可以满足该充饱和蒸气式温度 传感器的使用要求。 因此建议在确定变量膜片厚度h时,应保证膜片厚 度h大于等于3个该膜片材料最终状态的平均晶粒度之 和,这样可以保证充饱和蒸气式温度传感器在使用年限 内,泄漏率保持在合理可靠的范围。
4结语 第一,本文阐述了某型充饱和蒸气式温度传感器中 焊接波纹管的设计思路与方法,主要不同于充液式温度 传感器(常压充灌)的方面有: (1)膜片型面选择要 结合位移输出量、工作温度范围和感温介质充灌压力, 综合考虑膜片的刚度、耐压性和单位长度内的行程; (2)通过感温介质压~焓图确定最高工作温度和最低工 作温度时的压力范围,在此压力范围内合理配置其他变 量; (3)膜片厚度的选定要考虑防止感温介质在高压 气态下沿晶间泄漏。 第二,本文所阐述的某型充饱和蒸气式温度传感器 中焊接波纹管的设计思路与方法,部分参数是基于理 想化的参数,与实际参数会有一定出入,因此计算结果 不能完全与测试结果一致。该设计思路与方法可以最大 限度缩小与实际要求的距离,在实际试验过程仍需要进 行微量调整方可满足充饱和蒸气式温度传感器的性能 要求。