异步电动机矢量控制系统的仿真
- 格式:doc
- 大小:335.50 KB
- 文档页数:7
目录1引言 (1)1.1 交流电机调速系统发展的现状 (1)1.2 矢量控制的现状 (1)1.3 课题的研究背景及意义 (2)1.4 本课题的主要内容 (2)2 矢量控制的基本原理 (4)2.1 坐标变换的基本思路 (4)2.2 矢量控制坐标变换 (5)2.3 矢量控制系统结构 (8)3 转子磁链定向的矢量控制方程及解耦控制 (10)4 转速、磁链闭环控制的矢量控制系统 (13)4.1 带磁链除法环节的直接矢量控制系统 (13)4.2 带转矩内环的直接矢量控制系统 (13)5 控制系统的设计与仿真 (15)5.1 矢量控制系统的设计 (15)5.2 异步电动机的重要子模块模型 (16)5.3 系统仿真结果和分析 (18)6 结论 (21)参考文献 (22)致谢................................................................................................ 错误!未定义书签。
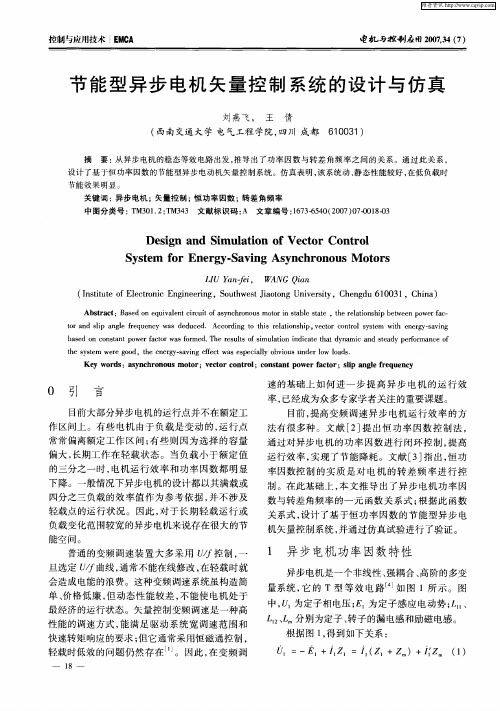
1引言1.1 交流电机调速系统发展的现状在当今用电系统中,电动机作为主要的动力设备而广泛地应用于工农业生产、防、科技及社会生活的方方面面[1] [2] [3] [4]。
电动机负荷约占总发电量的60%~70%,成为电量最多的电气设备。
根据采用的电流制式不同,电动机分为直流电动机和交电动机两大类,交流电动机分为同步电动机和异步电动机两种。
电动机作为把能转换为机械能的主要设备,在实际的应用中,一是要使电动机具有较高的机能量转换效率:二是要根据生产机械的工艺要求控制并调节电动机的转速。
电动的调速性能直接影响着产品质量、劳动生产效率和节电性能。
但是直到20世纪70年代,凡是要求调速范围广、速度控制精度高和动态响性能好的场合,几乎全都采用直流电动机调速系统。
其原因主要是:(1)不论异步电动机还是同步电动机,唯有改变定子供电频率调速是最为方便的,而且以获得优异的调速特性。

基于转子磁场定向异步电机矢量控制在 20 世纪 60 年月从前,全球电气传动系统中高性能调速传动都采纳直流电动机,而绝大多数不变速传动则使用交流电机。
使得交流电机的应用遇到很大限制。
1971 年德国学者 Blaschke F 提出了交流电动机的磁场定向控制原理,应用坐标变换将三相系统等效为两相系统,再经过按磁场定向的同步旋转变换实现了定子电流励磁重量与转矩重量之间的解耦,从而达到对交流电机的磁链和电流分别控制的目的,为异步电机的调速确定了基础。
磁耦合是机电能量变换的必需条件,电流与磁通的乘积产生转矩,转速与磁通的乘积获得感觉电动势。
无论是直流电动机,还是交流电动机均这样。
交、直流电动机结构和工作原理的不一样,使得表达式差异很大。
1 三相异步电机非线性数学模型在研究异步电机数学模型时,作以下的假设(1)忽视空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布。
(2)忽视磁路饱和,各绕组的自感和互感都是恒定的。
(3)忽视死心消耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。
无论异步电动机转子是绕线型还是笼型的,都可以等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数相等。
异步电动机三相绕组可以是Y 连接,也可以是连接。
若三相绕组为连接,可先用—Y变换,等效为Y 连接。
而后,按Y 连接进行解析和设计。
三相异步电机的物理模型以以下图1 所示,定子三相绕组轴线 A 、 B、C 在空间是固定的,转子绕组轴线a、b、c 随转子以角转速w 旋转。
图 1 三相异步电动机的物理模型异步电动机的动向模型由磁链方程、电压方程、转矩方程和运动方程构成。
此中磁链方程和转矩方程为代数方程,电压方程和运动方程为微分方程。
1.1 磁链方程异步电动机每个绕组的磁链是它自己的自感磁链和其他绕组对它的互感磁链之和 ,所以,六个绕组的磁链可用下式表示:A L AA L AB L AC L Aa L Ab L Ac i A B L BA L BB L BC L Ba L Bb L Bc i BCL CAL CB L CC L CaL Cb LCc i C (1)LaALaBLaCLaaLabLaci a a bL bALbBL bCL baL bbL bci b cLcALcB LcC Lca Lcb Lcci c式中 i A ,i B ,i C ,i a ,i b , i c 是定子和转子相电流的刹时价;A ,B ,C , a,b ,c 是各相绕组的全磁链。



第33卷 第2期2011年2月武 汉 理 工 大 学 学 报J O U R N A LO F W U H A NU N I V E R S I T YO FT E C H N O L O G Y V o l .33 N o .2 ==================================================F e b .2011D O I :10.3963/j .i s s n .1671-4431.2011.02.029基于G U I 的S V P WM 矢量控制系统仿真石晓瑛,许智榜(华东交通大学电气与电子工程学院,南昌330013)摘 要: 根据异步电动机矢量控制理论及空间矢量脉宽调制原理,构造了基于S V P WM 的异步电机矢量控制系统的通用仿真模型,在M a t l a b /G U I 环境下开发了交互式仿真系统调试平台㊂通过仿真实验,验证了通用模型的正确性,设计平台的有效性㊂采用所设计的系统仿真平台,有助于调节器参数的整定㊁仿真实验结果的对比,对于开发和研究S V P -WM 矢量控制有着十分重要的意义㊂关键词: S V P WM ; 矢量控制; 图形用户界面G U I ; 仿真平台中图分类号: TM346;T P391.9文献标识码: A 文章编号:1671-4431(2011)02-0128-05G U I -B a s e dS i m u l a t i o no f S V P WM V e c t o rC o n t r o l S ys t e m S H IX i a o -y i n g ,X UZ h i -b a n g (S c h o o l o fE l e c t r i c a l a n dE l e c t r o n i cE n g i n e e r i n g ,E a s tC h i n a J i a o t o n g U n i v e r s i t y ,N a n c h a n g 330013,C h i n a )A b s t r a c t : A c c o r d i n g t o i n d u c t i o nm o t o r v e c t o r c o n t r o l t h e o r y a n ds p a c ev e c t o r p u l s ew i d t h m o d u l a t i o n p r i n c i pl e ,t h e g e n e r a l -p u r p o s e s i m u l a t i o nm o d e l sb a s e do nS V P WMv e c t o r c o n t r o l s y s t e mo f i n d u c t i o nm o t o r a r e g i v e n .T h e i n t e r a c t i v e s i m u l a t i o n p l a t f o r mi s d e s i g n e d i nM a t l a b 's g r a p h i c a l u s e r i n t e r f a c e (G U I )e n v i r o n m e n t ,w h i c h i s u s e f u l i n s e t t i n g t h e r e g -u l a t o r p a r a m e t e r s a n d c o m p a r i s o n t h e s i m u l a t i o nr e s u l t s .A n ds i m u l a t i o ne x p e r i m e n t s f u l l y v e r i f y t h e c o r r e c t n e s so f t h e g e n e r a lm o d e l a n d t h e e f f e c t i v e n e s s o f t h e p l a t f o r m.I t i s i m p o r t a n t f o r t h ed e v e l o p m e n t a n dr e s e a r c ho f S V P WM v e c t o r c o n t r o l .K e y w o r d s : S p a c eV e c t o rP u l s e -W i d t h M o d u l a t i o n ; v e c t o rc o n t r o l ; G r a p h i c a lU s e r I n t e r f a c e ; s i m u l a t i o n p l a t -f o r m 收稿日期:2010-11-19.基金项目:国家自然科学基金(60804066)作者简介:石晓瑛(1973-),女,硕士,讲师.E -m a i l :x y s h i @4y.c o m.c n 交流电机变频调速已广泛应用于舰船㊁高速机车牵引㊁磁悬浮列车等领域,是国家十大节能工程电机系统节能的重点推广技术[1]㊂交流调速中的电压空间矢量脉宽调制(S V P WM )技术,不仅可使电机转速脉动降低㊁电流波形畸变减小,而且与常规的S P WM 技术相比直流电压利用率有很大的提高,比正弦脉宽调制逆变器输出电压高出15%,并且更利于实现数字化,因而电压空间矢量脉宽调制技术在交流传动领域得到了广泛的应用[2-3]㊂作者在M a t l a b /G U I 环境下建立基于S V P WM 的矢量控制系统交互式仿真平台,实现调节器参数的整定㊁仿真试验结果的对比,同时可以查看模型结构和推导公式,便于学习理解矢量控制㊂1 矢量控制系统矢量控制系统的基本思想是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,达到磁通电流分量和转矩电流分量完全解耦,具有良好的动态性能和控制精度㊂当两相同步旋转坐标系按转子磁链定向时,ψr m =ψr ,ψr t =0,控制方程式为T e =n p L m L r i s t ψr ψr =L m 1+T r p i s m ωs =L m T r ψr i ìîíïïïïïïïïs t (1)式中,T e 为转矩;n p 为极对数;ψ为磁链;T r 为转子时间常数;微分因子p =d d t ;ωs 为转差角速度㊂下标s 表示定子;r 表示转子;L m 表示同轴定㊁转子间的互感㊂S V P WM 矢量控制系统仿真平台采用模块化设计方法,主界面见图1㊂感应电机矢量控制系统中转速㊁转矩和磁链的闭环均采用P I 调节器,在转速闭环后增加了转矩控制内环,提高了转速的响应速度,转速调节器A S R 的输出是转矩调节器A T R 的给定T *e ,而转矩的反馈信号则通过控制式计算得到㊂为了减少转矩对磁链的影响,增加了磁链闭环,反馈的磁链幅值由转子磁链观测模型计算得出[4-5]㊂2 S V P WM 在S i m u l i n k 中的实现电压空间矢量P WM (S V P WM )控制把逆变器和交流电动机视为一体,按照跟踪圆形旋转磁场来控制逆变器的工作,具有较小的脉动转矩㊁更高的直流母线电压利用率㊁开关损耗小㊁更好的调速性能等优点,是高性能的电动机适用的控制系统㊂在三相电压逆变器中,根据不同桥臂的3个器件同时导通情况,逆变器的工作状态有8种,其中有6个基本电压矢量和2个零矢量㊂为了得到旋转电压空间矢量,有必要在一个正弦周期利用各种矢量的响应时间之间的差异合成电压空间矢量[6-8],S V P WM 仿真模块如图2所示㊂2.1 扇区判断通过u α,u β判断各个电压空间矢量所处的扇区㊂定义如果u β>0则A =1,否则A =0;如果3u α-u β>0则B =1,否则B =0;如果3u α+u β<0则C =1,否则C =0㊂N =A +2B +4C ,N =1㊁2㊁3㊁4㊁5㊁6时分别对921第33卷 第2期 石晓瑛,许智榜:基于G U I 的S V P WM 矢量控制系统仿真应第Ⅱ㊁Ⅵ㊁Ⅰ㊁Ⅳ㊁Ⅲ㊁Ⅴ扇区,扇区判断模块如图3所示㊂2.2 开关管导通时间计算由于电压矢量位于不同的扇区时,逆变器的各开关状态的导通时间是变化的㊂开关管导通时间如表1中T 1㊁T 2所示㊂ T 1㊁T 2为两相邻电压矢量的导通时间,X ㊁Y ㊁Z 由下式确定X =3T s u βU d c Y =3T s (u α+u β/3)2U d c Z =3T s (-u α+u β/3)2U ìîíïïïïïïïïd c (2)表1 不同扇区T 1、T 2取值及开关切换点的赋值表N 123456扇区ⅡⅥⅠⅣⅢⅤT 1Z Y -Z -X X -Y T 2Y -X X Z -Y -Z T c m 1T b T a T a T c T c T b T c m 2T a T c T b T b T a T c T c m 3T c T b T c T a T bT a 式中,T s 为开关周期;U d c 为逆变器直流母线电压㊂X ㊁Y ㊁Z 计算模块如图4所示㊂在计算T 1㊁T 2过程中,如出现T 1+T 2>T s 的情况,应加入饱和判断环节,即取T 1=T 1T s /(T 1+T 2)T 2=T 2T s /(T 1+T 2{)(3)2.3 切换点计算在T s /2内三相导通时间T c m 1㊁T c m 2㊁T c m 3,根据所在扇区查表1可以得到㊂T a ㊁T b ㊁T c 计算如下T a =T s -T 1-T 24T b =T a +T 12T c =T b +T 2ìîíïïïïïïï2(4) 然后与周期为T s ,峰值为T s /2的三角波进行比较从而得到开关管的触发脉冲,S V P WM 生成模块如图5所示㊂031 武 汉 理 工 大 学 学 报 2011年2月3 基于M a t l a b /G U I 的系统仿真平台由于M a t l a b 的图形用户界面(G U I )具有良好的事件驱动机制,同时提供了M a t l a b 数学库的接口,十分合适控制仿真平台设计㊂G U I 对于每个用户窗口生成.f i g 和.m 文件,前者负责界面的设计信息,后者负责后台代码的设计㊂基于G U I 的矢量控制仿真平台,能够:1)提供良好的人机交互仿真环境,便于用户在各种参数条件下的仿真实验㊂2)提供一定的可扩展性㊂通过给定接口,实现新算法(M 文件或C 文件)的动态加载[9]㊂通过该仿真平台可对电动机参数㊁给定指令㊁调节器参数等进行设定,实现与S i m u l i n k 的交互㊂借助于M a t l a b 的强大的图形功能,直观地对各仿真结果进行比较,判断调节器参数的合理性,总结调试规律㊂图6为仿真平台中的磁链观测电流模型的结构及推导公式[10-12]㊂4 仿真结果为验证作者所提方案的有效性,在交互式仿真平台中设置相应的参数㊂交流异步电机模型参数为:功率3.7k W ,电压460V ,频率50H z ,R s =0.087Ω,L 1s =0.8mH ,R r =0.228Ω,L 1r =0.8mH ,L m =0.0347H ,J =1.662k g ㊃m 2,n p =2㊂转速给定值为110r a d /s ,负载转矩给定初始值为0,1s 后改变为100N m ,转子磁链给定值为0.96W b ㊂图7为仿真波形图㊂仿真结果表明,系统能产生较好的圆形磁链,实现异步电机转矩电流分量和励磁电流分量的解耦控制㊂5 结 语利用M a t l a b 的G U I 编程环境建立了集对象输入㊁算法加载㊁系统仿真㊁输出分析于一体的异步电机矢131第33卷 第2期 石晓瑛,许智榜:基于G U I 的S V P WM 矢量控制系统仿真231 武 汉 理 工 大 学 学 报 2011年2月量控制系统仿真平台,有利于相关基本结论的验证㊂同时系统仿真平台具有良好的实用性㊁交互性和可扩展性,对于开发和研究交流传动系统有着十分重要的意义㊂参考文献[1] 李崇坚.大功率交流电机变频调速技术的研究[J].中国工程科学,2009,11(5):31-36.[2] 肖如晶.基于S m i u l i n k仿真的异步电动机直接矢量控制[J].防爆电机,2008,43(1):23-25.[3] 张建峡,杨 勇.电压空间矢量调制的交流调速技术的仿真教学[J].实验技术与管理,2006,23(9):86-89.[4] 张 敏,张井岗,赵志诚,等.交流调速系统的单神经元自适应内模控制[J].电机与控制学报,2009,13(2):227-231.[5] 张建峡,杨 勇,许德志,等.单神经元自适应PID控制交流调速系统[J].电机与控制学报,2007,11(2):130-137.[6] 邢绍邦,赵克友.电压型S V P WM的算法及其仿真[J].微特电机,2007,33(5):26-28.[7] 贺晓蓉,刘述喜.基于S V P WM的异步电机矢量控制系统的仿真[J].计算机仿真,2007,24(4):322-325.[8] 杨贵杰,孙 力,崔乃政,等.空间矢量脉宽调制方法的研究[J].中国电机工程学报,2001,21(5):79-83.[9] 秦 辉,席裕庚.基于MA T L A BG U I的预测控制仿真平台设计[J].系统仿真学报,2006,18(10):2778-2881.[10]S o m a s e k h a rV T,G o p a k u m a rK.T h r e e-l e v e l I n v e r t e rC o n f i g u r a t i o nC a s c a d i n g T w o2-l e v e l I n v e r t e r s[J].I E EP r o cE l e c t rP o w e rA p p l,2003,150(3):245-254.[11]B r a h m a n a n d aR e d d y T,A m a r n a t hJ,S u b b a r a y u d uD.I m p r o v e m e n t o fD T CP e r f o r m a n c eb y U s i n g H y b r i dS p a c eV e c t o rP u l s eW i d t h M o d u l a t i o nA l g o r i t h m[J].I n t e r n a t i o n a lR e v i e wo fE l e c t r i c a l E n g i n e e r i n g,2007,4(2):593-600. [12]李京秀,张薇娟.基于MA T L A BG U I可视化电路计算平台的开发[J].武汉理工大学学报,2010,32(14):162-165.(上接第99页)参考文献[1] 胡 波,杨志荣,刘顺桂,等.共面闭合断续节理岩体直剪强度特性研究[J].工程地质学,2008,16(3):327-331.[2] 李宏哲,夏才初,王晓东,等.含节理大理岩变形和强度特性的试验研究[J].岩石力学与工程学报,2008,27(10):2118-2123.[3] 周 文,朱自强,柳群义.复杂节理面剪切强度和变形特征的数值分析[J],中南大学学报:自然科学版,2009,40(6):1700-1704.[4] I n d r a r a t n a B,J a y a n a t h a n M,B r o w n E T.S h e a rS t r e n g t h M o d e lf o r O v e r C o n s o l i d a t e d C l a y-i n f i l l e dI d e a l i z e d R o c kJ o i n t s[J].G e o t e c h n i q u e,2008,58(1):55-65.[5] 周小平,张永兴,王 建,等.断续节理岩体劈裂破坏的贯通机理研究[J].岩石力学与工程学报,2005,24(1):8-12.[6] 周小平,建 华,张永兴.剪应力作用下断续节理岩体的强度特性[J].上海交通大学学报,2005,39(5):719-722.[7] 谢和平.分形 岩石力学导论[M].北京:科学出版社,2005.[8] 王谦源,栗东平,魏晋龙.岩体轴向抗压强度与变形尺度效应的节理分布影响[J].岩石力学与工程学报,2008,27(9):1852-1857.[9] 钟卫平,高 峰,沈晓明.岩石节理压剪破坏的数值分析[J].武汉理工大学学报,2007,29(1):102-104.[10]徐 磊,任青文.分形节理抗剪强度尺寸效应的数值试验[J].采矿与安全工程学报,2007,24(4):405-408.[11]徐 磊,任青文.不同充填度岩石分形节理抗剪强度的数值模拟[J].煤田地质与勘探,2007,35(3):52-54.[12]李世愚,和泰名,尹祥础.岩石断裂力学导论[M].合肥:中国科学技术大学出版社,2010.[13]朱维申,李术才,陈忠辉.节理岩体破坏机理和锚固效应及工程应用[M].北京:科学出版社,2002.。
基于MRAS的异步电机无速度传感器矢量控制异步电机矢量控制无速度传感器模型参考自适应1引言随着电力电子技术及自动控制技术的发展,交流电动机的调速系统正走向高性能化。
在高性能的交流调速系统中,为了提高系统的控制性能,转速的闭环控制环节一般是必不可少的。
通常,速度反馈量的检测多是采用光电脉冲编码器或测速发电机。
但高精度的速度传感器价格比较昂贵,明显增加了整个控制系统的成本。
同时速度传感器的安装存在同心度问题,由于安装中存在的问题使速度传感器成为系统的故障源,系统的机械可靠性大为降低,由此可以说在某种程度上破坏了交流异步电动机的简单、牢固等特性,限制了交流调速系统的应用范围。
因此研究无速度传感器交流调速系统,受到了国内外学术界和工程界高度重视,成为近年来的研究热点[1]。
无速度传感器矢量控制技术的核心问题是对磁链和转速进行准确辨识。
常见的磁链辨识方法有:电流模型法和电压模型法。
因电流模型需要转子转速的信息,而电压模型中不需要转子转速信息,所以无速度传感器矢量控制系统中通常采用电压模型进行磁链辨识[2]。
电压模型中含有纯积分环节,使得磁链的观测会因积分初值和漂移产生误差。
为了解决这一问题,可以采用一阶惯性环节来代替纯积分环节,由此引起的误差,可以通过参考磁链矢量经低通滤波器后的信号进行补偿[3-4]。
在磁链辨识基础上,需要对电机转速进行辨识。
近年来,随着高性能数字信号处理器的飞速发展,各种转速估计方法层出不穷。
如:直接计算法、模型参考自适应(MRAS—Model Reference Adaptive System)、基于自适应全阶状态观测器的方法、扩展卡尔曼滤波器法(EKF—Extended Kalman Filter)、神经网络法、齿槽谐波检测法、高频信号注入法等。
因MRAS原理简单、容易实现,在无速度交流调速系统中得到了广泛应用。
MRAS参数辨识思想:将不含待辨识参数的模型作为参考模型,将含有待辨识参数的模型作为可调模型,且两个模型具有相同物理意义的输出量,利用其输出量误差,并通过合适的自适应率来调节可调模型参数,已达到控制对象的输出跟踪参考模型的目的。
--
--
异步电动机矢量控制系统仿真
1. 异步电机矢量控制系统的原理及其仿真
1.1 异步电动机矢量控制原理
异步电机矢量变换控制系统和直接转矩控制系统都是目前已经获得应用的
高性能异步电机调速系统,对比直接转矩控制系统,矢量变换系统有可以连续控
制,调速范围宽的优点,因此矢量变换控制系统为现代交流调速的重要方向之一。
本文采用的是转子磁场间接定向电流控制型交流异步电机矢量控制系统[1],
如图1所示。
图1矢量变换控制系统仿真原理图
如果把转子磁链方向按空间旋转坐标系的M轴方向定向,则可得到按转
子磁场方式定向下的三相鼠笼式异步电动机的矢量控制方程。
(1)
(2)
(3)
(4)
--
--
(5)
上列各式中,是转子励磁电流参考值;是转差角频率给定值;是
定子电流的励磁分量;是定子电流的转矩分量;是定子频率输入角频率;
是转子速度;是转子磁场定向角度;是转子时间常数;和分别是电机互
感和转子自感。
图4所示控制系统中给定转速与实际电机转速相比较,误差信号送
入转速调节器,经转速调节器作用产生给定转矩信号,电机的激磁电流给定信
号根据电机实际转速由弱磁控制单元产生,再利用式(1)产生定子电流激
磁分量给定信号,定子电流转矩分量给定信号则根据式(2)所示的电机电
磁转矩表达式生成。、和转子时间常数Lr一起产生转差频率信号,与
ωr相加生成转子磁场频率给定信号,对积分则得到转子磁场空间角度给定
信号。和经坐标旋转和2/3相变换产生定子三相电流给定信号、和,
与定子三相电流实测信号、和相比较,由滞环控制器产生逆变器所需的
三相PWM信号。
1.2 异步电机转差型矢量控制系统建模
在MATLAB/SIMULINK环境下利用电气系统模块库中的元件搭建交流异步电
机转差型矢量控制系统[2],电流控制变频模型如图2所示。
图2 电流控制变频模型图
整个仿真图由电气系统模块库中的元件搭建组成,元件的直观连接与实际的
主电路相像似,其中主要包括:速度给定环节,PI速度调节器、坐标变换模块、
--
--
磁场定向模块、滞环电流调节器、IGBT逆变器元件、异步电动机元件以及测量
和显示模块。这些元件都有设置对话框,用户可以方便的选择元件类型和设置参
数。在整个控制系统的仿真模型中,交流异步电机的模型是最重要的元件,在
Powerlib中给出了各种电机模型,这大大减少了交流调速系统的建模难度。
控制系统采用转速电流双闭环控制,其中的磁场定向模块提供矢量控制
坐标变换需要的磁链位置角,电机模型如图3所示。
图3 矢量控制电机模型仿真框图
1.3 异步电机转差型矢量控制系统仿真
由于系统中包含非线性Powerlib模块(电机、逆变器),因此仿真采用变步长
算法,这样异步电机非线性部分和逆变器的过零点才能精确的计算出来,但是这
样会增加仿真步数减少仿真速度。由于在仿真初始化过程中,Power2sys函数将
逐个检查模型中的各个模块是否为Powerlib模块,这样对一个复杂系统在一定
程度上会降低仿真速度。为此我们可以人为迫使Power2sys不去检查那些常规模
块,方法是在常规模块以及包含常规模块的子系统的模块名字前加一个“$”符号,
这样可以提高仿真速度。仿真过程中由于初始值选择不当或者系统中存在分式,
会出现奇异点使仿真过程停止,可以在分母中加上一个很小地值或选择适当的初
值避免奇异点的出现。
图2中的电压测量单元和电机输出测量单元是Simulink模块与Powerlib
模块间的接口模块,分别把电机定子电压信号和电机输出信号反馈回Simulink
模块。电压控制信号作为Simulink模块的信号送入到Powerlib模块—异步电机
--
--
时,是通过可控电流源(IGBT逆变器)作为中间环节。仿真时要注意二者之间
的联系,防止仿真出错停止,转子磁链观测模型如图4.
图4 转子磁链观测模型
4.4 仿真结果
在MATLAB/SIMULINK6.5环境下对所建立的交流异步电机转差型矢量控制系
统采用变步长方法进行仿真,其中交流异步电机参数如下:RS=1.898Ω,
LS=0.196H,Rr=1.45Ω,Lr=0.196H,Lm=0.187H,PN=3kW,UN=380V,J=0.0067kg·m2,
f=50Hz,pn=2。
为了验证所设计的交流异步电机矢量控制系统模型的静、动态性能,系统空
载启动,待进入稳态后,在t=0.2s时转速突加为180r/min,t=0.4s时又突减为
120r/min。待系统稳定后,t=0.6s时突加负载5Nm,t=0.8s时突减负载,重新
回到空载状态。在经过一系列转速突变和负载扰动仿真后,得到电机各个量响应
输出波形如图7~12。
--
--
图4 电磁转矩波形
图5 电机转速波形
图6 定子三相电流波形
--
--
图7 dq坐标系下转子两相电流波形
图8 dq坐标系下转子磁链波形
--
--
图9 dq坐标系下定子磁链波形
由仿真波形可以看出,在的参考转速下,系统空载启动,转速
很快达到给定值,电流和转矩波形较为理想。t=0.2s时转速突加到180r/min,
电流和电磁转矩相应增加,随即又到达稳定状态。t=0.4s时转速突然下降,电
流和转矩也立即跟随变化。t=0.6s时突加负载扰动,转矩马上突变,电流也相
应增加,而转速几乎没有变化。t=0.8s时突减负载,转矩和电流同时变化,转
速仍然稳定在给定的120r/min上。定转子磁链响应也随着变化过程增大和减小。
可见,整个过程中转速给定和负载扰动频繁突变,而转速能很好的跟随给定值,
且响应时间短,过渡过程快,有很好的跟随和抑制扰动的性能。整个变化过程中
电磁转矩也能够瞬间响应,并很快达到稳定。在稳态时的转矩有很小的脉动,这
主要是由于电流换向和滞环控制器频繁切换造成的,脉动大小跟滞环宽度有关。
参考文献:
[1] 李家荣,邓智全. 三相异步电动机矢量控制调速系统的建模与仿真[J].淮南工
学院学报.2001(6)
[2] 陈伯时,陈敏逊. 交流调速系统[M].北京:机械工业出版社,1998.