基于双环控制的单相电压型PWM逆变器建模与仿真
- 格式:pdf
- 大小:381.81 KB
- 文档页数:4
单相逆变器重复控制和双环控制技术研究单相逆变器是一种将直流电能转换为交流电能的设备,广泛应用于太阳能光伏发电系统、无线电通信系统等领域。
在单相逆变器的控制技术中,重复控制和双环控制是两种常用的控制策略。
本文将介绍这两种控制技术的原理和特点,并对其研究进行探讨。
首先,重复控制是一种周期性控制策略,通过周期性地叠加可调谐的谐波信号来消除输出电压中的各谐波分量,提高电压波形的质量。
重复控制的基本原理是通过周期重复地改变脉宽和脉冲间隔来控制输出电压的谐波分量。
在重复控制中,首先将原始交流电压信号通过一组谐波振荡器分解成几个谐波成分,然后分别调节这些谐波成分的幅值和相位,合成与原始信号相似的控制信号,通过PWM (Pulse Width Modulation) 方式控制逆变器的开关器件,获得期望电压输出波形。
相较于传统的PWM控制技术,重复控制具有以下优点:一是重复控制能够较好地抑制谐波污染,改善输出电压的波形质量;二是重复控制不需要额外的滤波器,减少了系统的成本和复杂性;三是重复控制适用于各种逆变器拓扑结构,具有广泛的应用范围。
但是,重复控制技术也存在一些问题,例如在低功率因数或部分负载情况下,可能会导致电流谐波增加、控制动态性能下降等。
另一种常用的单相逆变器控制技术是双环控制。
双环控制是基于内环控制和外环控制的思想,通过内环和外环两个控制环来分别控制逆变器的电流和电压,提高逆变器的性能和稳定性。
具体来说,内环控制主要负责控制逆变器的电流,通过调节电流环的控制参数,实现对电流的精确控制;外环控制则主要负责控制逆变器的电压,通过调节电压环的控制参数,实现对电压的精确控制。
双环控制技术通过内环和外环之间的相互作用,使得整个控制系统具有更好的鲁棒性和稳定性。
与重复控制技术相比,双环控制技术具有以下优点:一是双环控制技术能够实现更高的控制精度和稳定性;二是双环控制技术能够适应不同的工作状态,具有更好的动态响应性能;三是双环控制技术能够通过调整环节的控制参数,实现对逆变器的柔性控制。
单相PWM逆变电路的两种仿真模型建立吴炳娇;赵峰【摘要】在多数逆变电路的仿真中,通常都是直接采用Matlab提供的PWM发生器,建立逆变电路的仿真模型,很少根据PWM产生的机理,建立PWM发生器的数学模型.对单相桥式逆变电路进行仿真时,建立PWM发生器的仿真模型并和Matlab 下提供的PWM发生器的仿真模型进行比较,仿真结果表明,根据PWM产生的原理建立的PWM发生器仿真模型的正确性,为PWM产生模型的建立提供了更广阔的选择空间.【期刊名称】《电气传动自动化》【年(卷),期】2012(034)002【总页数】4页(P40-43)【关键词】PWM发生器;单相桥式逆变电路;PWM控制技术;数学模型;Matlab仿真【作者】吴炳娇;赵峰【作者单位】兰州交通大学自动化与电气工程学院,甘肃兰州730070;兰州交通大学自动化与电气工程学院,甘肃兰州730070【正文语种】中文【中图分类】TM51 引言PWM控制技术在电力电子技术中占有重要的地位,电力电子中各种电能变换电路的实现基本都依赖于PWM技术,尤其在逆变电路中的应用十分广泛,目前中小功率的逆变电路几乎都采用了PWM技术。
PWM控制技术就是对脉冲宽度进行调制的技术,即通过对一系列脉冲的宽度进行调制,来等效地获取所需要的波形。
PWM控制技术首先在逆变电路中获得应用,并且它是依赖于在逆变电路中的应用,才发展得比较成熟。
PWM控制技术在电力电子中应用,得益于它能够改善相控技术给电能变换所带来的谐波等不和谐因素,使电能变换能够获得更好的应用。
2 单相桥式逆变电路单相桥式逆变电路是三相桥式逆变电路的基础,二者的基本理论是相同的。
为了说明PWM技术在逆变电路中的应用,以单相桥式逆变电路为例,对逆变电路的工作过程进行分析。
开关器件可以采用各种电力电子器件,这里采用IGBT作为开关器件。
图1所示为单相桥式逆变电路的框图,设负载为阻感负载。
在桥式逆变电路中,桥臂的上下两个开关器件轮流导通,即工作时V1和V2通断状态互补,V3和V4的通断状态互补。
单相逆变器电路设计与仿真multisim【原创实用版】目录1.单相逆变器电路设计2.单相逆变器的建模与仿真3.控制思路与电路拓扑4.负载使用单相桥式整流5.电流内环与电压外环控制6.MATLAB 中的单相全桥逆变器电路建模与仿真7.利用仿真减少逆变器电路设计工时8.单相 LCL 并网逆变器 simulink 仿真9.逆变电路设计过程及仿真实例10.DC/AC:单相方波全桥逆变电路设计原理及实验仿真正文一、单相逆变器电路设计单相逆变器是一种将直流电源转换为交流电源的电路,其主要应用在太阳能发电、风力发电以及电力电子设备中。
在设计过程中,需要考虑电路的拓扑结构、控制策略以及负载特性等因素。
二、单相逆变器的建模与仿真建模是对电路的数学描述,仿真是利用计算机模拟电路的工作过程。
对于单相逆变器,可以使用 MATLAB 或 Multisim 等软件进行建模与仿真,以验证电路的性能指标是否满足设计要求。
三、控制思路与电路拓扑控制部分采用 PI 控制,包含电压外环和电流内环。
电压外环控制输出电压,电流内环控制输出电流。
电路拓扑采用全桥逆变电路,使用 LC 滤波器,负载为单相桥式整流电路。
四、负载使用单相桥式整流在单相逆变器电路中,负载通常使用单相桥式整流电路。
这种整流电路具有结构简单、工作效率高等优点,适合用于电压波形为矩形波的负载。
五、电流内环与电压外环控制电流内环和电压外环是逆变器控制策略的两个重要部分。
电流内环控制电流,电压外环控制电压。
通过这两个环路的联合控制,可以实现逆变器输出电压和电流的高效调节。
六、MATLAB 中的单相全桥逆变器电路建模与仿真在 MATLAB 中,可以通过 Simulink 工具箱搭建单相全桥逆变器电路模型,并进行仿真实验。
仿真结果表明,当同时打开绝缘栅双极型晶体管时,负载两端的电压和电流波形方向相同;当二极管 vd 同时导通时,电压和电流波形方向相反,理论分析与仿真实验结果完全一致。
V-M双闭环直流可逆调速系统建模与仿真⽬录摘要 (2)1设计任务及要求 (3)1.1设计任务 (3)1.2设计要求 (3)2 V-M双闭环调速系统的设计 (5)3系统主电路的设计 (8)3.1电⽓原理图及说明 (8)3.2平波电抗器的选择 (8)3.3变压器的选择 (9)3.4晶闸管的选择 (10)3.5保护电路的设计 (10)4电流调节器的设计 (11)4.1电流环结构框图 (11)4.2电流环参数的计算 (12)4.2.1时间常数的计算 (12)4.2.2电流调节器结构的选择 (13)4.2.3电流调节器参数的计算 (14)4.2.4校验近似条件 (14)4.2.5计算调节器电阻和电容 (14)5转速调节器的设计 (16)5.1转速环结构框图 (16)5.2转速环参数的计算 (17)5.2.1时间常数的计算 (17)5.2.2转速调节器结构的选择 (17)5.2.3转速调节器参数的计算 (18)5.2.4检验近似条件 (18)5.2.5计算调节器电阻和电容 (19)5.2.6校核转速超调量 (19)6电流环和转速环的仿真 (21)6.1电流环的仿真 (21)6.1.1电流环的仿真模型 (21)6.2.1转速环的仿真模型 (23)6.2.2转速环的仿真结果 (24)7控制及驱动电路设计 (25)8电⽓原理总图 (26)9总结 (27)参考⽂献 (28)摘要转速、电流双闭环控制直流调速系统是性能很好、应⽤最⼴的直流调速系统。
具有调速范围⼴、精度⾼、动态性能好和易于控制等优点,所以在电⽓传动系统中得到了⼴泛的应⽤。
常⽤的电机调速系统有转速闭环控制系统和电流闭环控制系统,⼆者都可以在⼀定程度上克服开环系统造成的电动机静差率,但是不够理想。
实际设计中常采⽤转速、电流双闭环控制系统,⼀般使电流环(ACR)作为控制系统的内环,转速环(ASR)作为控制系统的外环,以此来提⾼系统的动态和静态性能。
本⽂是按照⼯程设计的⽅法来设计转速和电流调节器的。
V-M双闭环直流可逆调速系统建模与仿真1 设计任务与分析有许多生产机械要求电动机既能正转,又能反转,而且常常还需要快速地起动和制动,这就需要电力拖动系统具有四象限运行的特性,也就是说,需要可逆的调速系统。
本设计是V-M 双闭环直流可逆调速系统建模与仿真,主要包括可逆部分和双闭环直流调速部分。
可逆部分可以由两组晶闸管可控整流装置反并联实现,通过控制电路和触发电路来实现整流与逆变的转换。
而设计要求调速系统能进行平滑的速度调节,具有较宽的调速范围(D≥ 10),系统在工作范围内能稳定工作,系统静特性良好,动态性能指标要求转速超调量δn< 10%,电流超调量δi< 5%,动态速降Δn≤ 10%,调速系统的过渡过程时间(调节时间)t s≤ 1s ,系统在5%负载以上变化的运行范围内电流连续,这些可以按双闭环直流调速部分的知识设计电流调节器和转速调节器来实现。
转速、电流双闭环直流调速系统是性能很好,应用最广的直流调速系统,采用转速、电流双闭环直流调速系统可获得优良的静、动态调速特性。
转速、电流双闭环直流调速系统的控制规律、性能特点和设计方法是各种交、直流电力拖动自动控制系统的重要基础,所以掌握直流双闭环调速系统对于电力拖动控制系统的学习有很重要的作用。
针对本设计的仿真,应用软件MATLAB的Simulink 软件包,Simulink 是实现动态系统建模,仿真的一个集成环境。
它使MATLAB的功能得到进一步扩展。
它提供的丰富功能块,可以迅速的创建动态系统模型;实现了可是换建模,用户可以通过简单的鼠标操作建立直观模型进行仿真;实现了多工作环境间文件互用和数据交换。
使用MATLAB中的Simulink任务,根据各个环节的函数模型,建立数学仿真模型,进行系统仿真。
本课程设计就要求结合给定的初始条件来完成直流双闭环调速系统的设计,其中包括绘制该调速系统的原理图,对调节器进行工程设计,选择调节器的参数等。
要实现直流双闭环调速系统的设计需先对控制系统的组成及工作原理有一定深入的理解,弄清楚调速系统每个组成部分的作用,弄清楚转速环和电流环的工作原理,合理选择调节器的参数以便进行合理的工程设计并进行仿真。
V-M双闭环直流调速系统建模与仿真1.主电路选型和闭环系统调速系统组成原理V-M双闭环直流调速系统,是由单闭环直流调速系统发展起来的,调速系统使用比例积分调节器,可以实现转速的无静差调速。
采用电流截止负载环节,限制了起(制)动时的最大电流。
这对一般的要求不太高的调速系统,基本上已能满足要求,但电流环只是在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
在实际工作中,缩短起、制动的时间是提高生产率的重要因素。
为此,在起动、制动的过程中,希望能够始终保持电流(电磁转矩)为允许的最大值,使调速系统以最大的加(减)速度运行。
,到达稳定转速后,最好让电流立即降下来,使电磁转矩马上与负载转矩相平衡,从而转入稳态运行。
这样的理想起动(制动)过程波形如图1-1所示,这时,起动电流成矩形,而转速按线性增长。
这是在最大电流(转矩)受限制时调速系统所能得到的最快的起动(制动)过程。
图1-1 调速系统时间最优理想过渡过程实际上,由于主电路电感的作用,电流不可能突变,为了实现I在允许条件下最快起动,关键是要获得一段使电流保持为最大值dm 的恒流过程。
按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈就能得到近似的恒流过程。
问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不再靠电流负反馈发挥主作用。
为了达到以上目的系统采用转速、电流双闭环直流调速系统。
分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套连接,如图1-2所示。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速,电流反馈控制直流调速系统。
为了获得良好的静,动态性能,转速和电流两个调节器一般都采用PI调节器。
图1-2 转速、电流反馈控制直流调速系统原理图ASR---转速调节器ACR---电流调节器TG---测速发电机TA---电流互器UPE---电力电子变换器Un*---转速给定电压Un---转速反馈电压Ui*---电流给定电压Ui---电流反馈电压本设计采用三相全控桥整流电路,在直流侧串有平波电抗器,该电路能为电动机负载提供稳定可靠的电源,利用控制角的大小可有效的调节转速,并在直流交流侧安置了保护装置,保证各元器件能安全的工作,同时由于使用了闭环控制,使得整个调速系统具有很好的动态性能和稳态性能。
单相逆变器设计与仿真班级学技术要求:逆变器类型:单相逆变器输出额定电压:825V输出额定功率:25KVA输出额定频率:50HZ功率因素:≥0.8过载倍数:1.5⑴、设计主电路参数;⑵、建立数学模型,给出控制策略,计算控制器参数;⑶、建立仿真模型,给出仿真结果,对仿真结果进行分析。
目录一、单相逆变器设计 .....................................................................................................- 4 -1、技术要求 ..........................................................................................................- 4 -2、电路原理图 .......................................................................................................- 4 -3、负载参数计算 ...................................................................................................- 4 -3.1、负载电阻最小值计算 ...............................................................................- 5 -3.2、负载电感最小值计算 ...............................................................................- 5 - 3.3、滤波电容计算..........................................................................................- 5 - 4、无隔离变压器时,逆变器输出电流计算 .............................................................- 6 -4.1、长期最大电流(长)O I ...............................................................................- 6 -4.2、短期最大电流短)(0I .................................................................................- 7 - 5、无隔离变压器时,逆变器输出电流峰值 .............................................................- 7 -5.1、长期电流峰值长)(OP I ...............................................................................- 7 - 5.2、短期电流峰值短)(OP I ...............................................................................- 7 - 6、滤波电感计算 ...................................................................................................- 7 -6.1、滤波电感的作用 ......................................................................................- 7 - 6.2、设计滤波器时应该注意的问题 .................................................................- 7 - 6.3、设计滤波器的要求...................................................................................- 8 - 7、逆变电路输出电压(滤波电路输入电压) .........................................................- 8 -7.1、空载........................................................................................................- 9 - 7.2、 额定负载纯阻性1cos =ϕ .....................................................................- 9 - 7.3、额定负载阻感性8.0cos =ϕ ....................................................................- 9 - 7.4、过载纯阻性1cos =ϕ ............................................................................ - 10 - 7.5、过载阻感性8.0cos =ϕ ......................................................................... - 11 - 8、逆变电路输出电压 .......................................................................................... - 11 - 9、逆变电路和输出电路之间的电压匹配 .............................................................. - 12 - 10、根据开关压降电流选择开关器件.................................................................... - 12 - 11、开关器件的耐压 ............................................................................................ - 13 - 12、单相逆变器的数学模型.................................................................................. - 13 - 13、输出滤波模型................................................................................................ - 14 - 14、单相逆变器的控制策略.................................................................................. - 15 - 14.1、电压单闭环控制系统 ........................................................................... - 15 - 14.2、电流内环、电压外环双闭环控制系统 ................................................... - 16 -二、单相逆变器仿真 ................................................................................................... - 20 -1、输出滤波电路仿真 .......................................................................................... - 20 -2、电压单闭环控制系统仿真 ................................................................................ - 21 -3、电流内环、电压外环双闭环控制系统 .............................................................. - 23 -一、单相逆变器设计1、技术要求输出额定电压:825V输出额定功率:25KVA输出额定频率:50HZ功率因素:≥0.8过载倍数:1.52、电路原理图图1 单相全桥逆变电路设计步骤:(1)、根据负载要求,计算输出电路参数。

单相逆变器SPWM调制技术的仿真课程设计(论文)任务书电气学院学院11电力牵引专业(3)班一、课程设计(论文)题目单相逆变器SPWM调制技术的仿真二、课程设计(论文)工作自 2014年 6月 16日起至 2014年 6月 20 日止。
三、课程设计(论文) 地点: 电气学院机房四、课程设计(论文)内容要求:1.本课程设计的目的(1)熟练掌握MATLAB语言的基本知识和技能;(2)熟悉matlab下的simulink和simpowersystems工具箱;(3)熟悉构建单相桥式逆变器SPWM单极性和双极性调制的仿真模型;(4)培养分析、解决问题的能力;提高学生的科技论文写作能力。
2.课程设计的任务及要求1)基本要求:(1)要求对主电路和脉冲电路进行封装,并对调制度和载波比参数进行封装;(2)仿真参数为:E=100-300V; Ma=0.8-0.95; N=9-21; h=0.0001s,其他参数自定;(3)给出调制波原理图、相电压、相电流、线电压、不同器件所承受的电压波形以及频谱图,要求采用subplot作图;(4)选取不同参数进行仿真,比较仿真结果有何变化,给出自己的结论。
(5)利用matlab下的simulink和simpowersystems工具箱构建单相桥式逆变器spwm单极性和双极性调制的仿真模型。
2)创新要求:封装使仿真模型更加美观、合理3)课程设计论文编写要求(1)要按照课程设计模板的规格书写课程设计论文(2)论文包括目录、正文、心得体会、参考文献等目录1.引言.......................................... - 8 -2.软件介绍...................................... - 9 -3.电力电子电路的仿真实验系统设计 ............... - 10 - 3.1实验系统总体设计 (10)3.2电力电子电路S IMULINK仿真,具有以下特点 (11)4.单相逆变器SPWM调制技术的仿真 ................ - 11 - 4.1单相逆变器SPWM调制电路的基本结构图.. (11)4.2单相逆变器SPWM调制电路的工作原理 (12)4.2.1 逆变器SPWM调制原理................... - 12 -4.2.2 SPWM控制方式......................... - 14 -4.3单相逆变器SPWM调制电路的S IMULINK模型. (16)4.3.1 单极性SPWM仿真的模型图................ - 16 -4.3.1 单极性SPWM仿真的模型图................ - 18 -4.4模型参数的设定模型仿真图及其分析.. (20)4.3.1 单极性SPWM仿真 ....................... - 20 -4.3.2 双极性SPWM仿真 ....................... - 26 -5.结束语....................................... - 34 -6.参考文献..................................... - 35 -单相逆变器SPWM调制技术仿真的课程设计[摘要]:随着电力电子技术的不断发展,可控电路直流电动机控制,可变直流电源等方面得到了广泛的应用,而这些都是以逆变电路为核心。
2电工电气 (20 7 No.4)作者简介:王博超(1992- ),女,硕士研究生,研究方向为电力电子控制技术与仿真。
基于LC滤波器的单相SPWM逆变器双环控制设计王博超(东南大学 电气工程学院,江苏 南京 210096)摘 要:对基于LC 滤波器的单相SPWM 逆变器的双环控制进行了分析,得到了LC 滤波器在逆变器使用单极性倍频的调制方式下的参数设定,以此为基础对单相逆变器的双环控制方式进行了建模及电压环、电流环的参数确定。
利用MATLAB/Simulink 软件对该逆变器模型进行了线性负载的突加突减仿真与带非线性负载时开、闭环的谐波畸变率的对比仿真。
仿真结果表明,该种控制策略下逆变器具有较好的动态响应性能及较低的谐波畸变率。
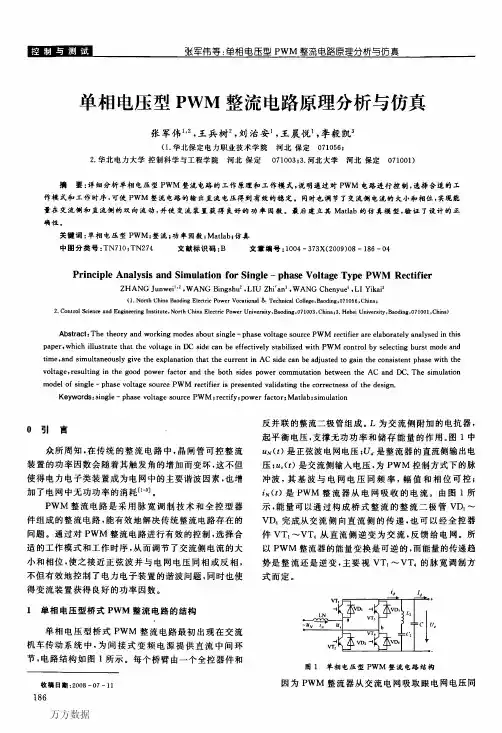
关键词:SPWM 逆变器;LC 滤波器;双环控制中图分类号:TM464 文献标识码:A 文章编号:1007-3175(2017)04-0021-05Abstract: This paper analyzed the double loop control of sigle-phase sinusoidal pulse width modulation (SPWM) inverter based on the LC filter and obtained the parameters setting of the LC filter under the conditions that the inverter used the unipolarity frequency-doubled modula -tion mode. On the basis of this, this paper established the sigle-phase inverter model with double loop control mode and determined the pa -rameters of voltage loop and current loop. The Simulink in MA TLAB was used to carry out simulation of sharp increase and reduction for the linear load of the inverter model, comparing with the loop-opened or loop-locked harmonic distortion rate for the nonlinear load. The simulation results show that this kind of control strategy can obtain favorable dynamic response and low total harmonic distortion (THD). Key words: sinusoidal pulse width modulation inverter; LC filter; double loop controlWANG Bo-chao(School of Electrical Engineering, Southeast University, Nanjing 2 00 , China )Design of Double Loop Control in Single-Phase Sinusoidal Pulse WidthModulation Inverter Based on LC Filter0 引言近些年来,为了获得具有更高的供电质量以及供电稳定性的供电系统,高性能的SPWM 逆变电源的研究、开发及其应用受到了各方面的关注,而其中的瞬时控制方案则是最重要的部分之一。
逆变器电压电流双环控制设计及研究本文针对逆变器的电压和电流控制进行设计和研究,主要包括双环控制策略、控制器设计和实验验证等方面。
1. 双环控制策略逆变器的电压和电流控制可以采用双环控制策略进行设计,即外环电压控制和内环电流控制。
外环控制器输出的控制量为电压参考值,内环控制器输出的控制量为电流参考值。
在外环控制器中,采用比例积分控制(PI控制)策略,控制器的输入为电压误差,输出为电压参考值。
在内环控制器中,同样采用PI控制策略,控制器的输入为电流误差,输出为电流参考值。
双环控制策略能够实现对逆变器输出电压和电流的精确控制,提高逆变器的性能和稳定性。
2. 控制器设计为了实现双环控制策略,需要设计外环控制器和内环控制器。
以外环控制器为例,设电压误差为$e_v$,控制参考值为$v_{ref}$,比例系数为$K_p$,积分系数为$K_i$,则外环控制器的输出为:$u_v = K_p e_v + K_i \int_0^t e_v dt$其中,$e_v = v_{ref} - v$,$v$为逆变器输出电压。
在实际应用中,为了避免积分饱和和积分器漂移等问题,通常采用积分分离控制(PID控制)策略对PI控制进行改进。
内环控制器的设计与外环类似,以电流误差为输入,电流参考值为输出,采用PI或PID控制策略。
3. 实验验证为了验证双环控制策略的有效性,可以进行基于硬件平台的实验验证。
以SPWM逆变器为例,可以搭建逆变器硬件实验平台,通过改变电压参考值和电流参考值,观察逆变器输出电压和电流的实际变化情况。
通过实验结果可以有效地评估双环控制策略的性能和稳定性,为实际应用提供参考依据。
总之,双环控制策略在逆变器电压电流控制中具有重要的应用价值,控制器的设计和实验验证是关键步骤。
毕 业 设 计题 目:带异步电动机的PWM 电压型逆变器的建模与仿真系: 电气信息学院专业: 电气工程 班级: 0805 学号: 200801010513 学生姓名: 隆森洲 导师姓名: 周炼 完成日期: 2012-6-10毕业设计(论文)任务书题目:带异步电动机的PWM电压型逆变器的建模与仿真姓名隆森洲系别电气与信息工程系专业电气工程班级0805 学号13指导老师周炼职称讲师教研室主任谢卫才一、基本任务及要求:变频调速系统的核心是三相PWM电压型逆变器,为了缩短对大功率装置的研发时间和减少研发经费支出,经常利用计算机仿真技术进行一些验证工作,本课题拟利用MATLAB的工具箱构造SPWM逆变器-异步电机系统,设计PWM逆变器控制回路,展开对该系统的一些研究。
设计的主要内容:1、设计方案论证、比较及确定2、设计完善的硬件电路3、元器件选型及有关计算4、软件设计及有关调试二、进度安排及完成时间:1、第一周至第三周:明确课题任务及要求,搜集课题所需资料,掌握资料查阅方法,了解本课题研究现状、存在问题及研究的实际意义。
2、第三周:查阅相关资料,自学相关内容,确定课题总体方案,分配课题任务,确定个人研究重点,做好选题报告。
3、第四周至第五周:根据自己研究的方向,确定自己的总体设计方案,根据对象特性进行各种控制方法的研究,并设计硬件总体模块图及软件模块图。
4、第六周至第十二周:完成系统的控制方法研究,软、硬件设计。
5、第十三周至第十四周:系统仿真及调试。
6、第十五周至第十六周:整理资料,完成毕业论文编写,进行毕业答辩。
诚信声明本人声明:1、本人所呈交的毕业设计(论文)是在老师指导下进行的研究工作及取得的研究成果;2、据查证,除了文中特别加以标注和致谢的地方外,毕业设计(论文)中不包含其他人已经公开发表过的研究成果,也不包含为获得其他教育机构的学位而使用过的材料;3、我承诺,本人提交的毕业设计(论文)中的所有内容均真实、可信。
逆变器双环控制策略及其数字离散化逆变器作为新能源系统中主要的能量转换装置,其性能直接影响到整机效率的高低。
本文采用电流内环、电压外环的双闭环控制方式,电流环设计为带通(BP)调节器解决母线电压波动对并网电流产生的畸变,电压环设计为近似典型II型系统提高系统响应速度。
最后,进行了数字离散化处理。
标签:逆变器;双闭环控;数字化实现0 引言风能、太阳能等新能源发电系统具有环境污染小、调节灵活等优点受到了越来越多的关注。
逆变器作为新能源发电系统中电能并网的重要接口,其工作性能的优劣直接影响到并网电流的质量,逆变器的控制环节决定了并网电流最终的波形、总谐波失真、功率因数、跟踪误差、动态响应速度等性能,因此对并网电流控制技术也显得十分重要。
逆变并网系统的控制目标为稳定直流母线电压和单位功率因数并网,其逆变侧采用双闭环控制策略的系统结构框图如图1所示,电流内环用于控制并网电流,电网电压同步信号用于锁相,从而实现单位功率因数并网,电压外环稳定逆变器的母线电压,为逆变器提供稳定并网条件。
1 逆变器双闭环调节器设计逆变器电流内环为BP调节器,其在基波频率处增益较大,基波频率以外增益逐渐衰减,即使电流指令中引入谐波,但BP调节器对应的闭环系统只响应电流中的基波频率分量,通过闭环反馈输出电流中谐波含量大大降低,BP调节器表达式设计为:(1)电流内环作为并网侧的单位闭环反馈环节,追求反馈电流与指令电流的精准跟踪。
根据系统闭环设计可知,作为单位闭环反馈系统其可以等效为增益近似为1的一阶惯性环节,惯性时间常数τ可认为为系统闭环传递函数的-3dB频带的倒数。
(2)将电压环设计为近似典型II型系统,电压调节器Gv(s)的传递函数设计为(3)式中τv1是电压调节器的一阶微分时间常数,τv2是电压调节器一阶惯性时间常数,kpv为电压调节器比例系数。
为了满足系統性能指标,电压环截止频率ωcv设计为100rad/s。
根据系统典型II型电子最佳设计有,为了电压环响应速度快,第一转折频率离截止频率较远,第二转折频率离截止频率较近。
逆变电路是P W M控制技术最为重要的应用场合。
这里在研究单相桥式P WM逆变电路的理论基础上,采用Ma t la b的可视化仿真工具S i mu lin k建立单相桥式单极性控制方式下P W M逆变电路的仿真模型,通过动态仿真,研究了调制深度、载波频率对输出电压、负载上电流的影响;并分析了输出电压、负载上电流的谐波特性。
仿真结果表明建模的正确性,并证明了该模型具有快捷、灵活、方便、直观等一系列特点,从而为电力电子技术教学和研究中提供了一种较好的辅助工具。
关键词:Matlab/Simulink;PWM逆变电路;动态仿真;建模;PWM控制技术是逆变电路中应用最为广泛的技术,现在大量应用的逆变电路中,绝大部分都是PWM型逆变电路。
为了对PWM型逆变电路进行分析,首先建立了逆变器控制所需的电路模型,采用IGBT作为开关器件,并对单相桥式电压型逆变电路和PWM控制电路的工作原理进行了分析,运用MATLAB中的SIMULINK对电路进行了仿真,给出了仿真波形,并运用MATLAB提供的powergui模块对仿真波形进行了FFT分析(谐波分析)。
通过仿真分析表明,运用PWM控制技术可以很好的实现逆变电路的运行要求。
目录摘要 (1)前言 (2)一逆变电路相关概述 (4)1.1 .MATLAB的介绍 (4)1.2 PWM技术 (4)1.3PWM控制方法 (5)二主电路工作原理说明 (10)2.1 PWM控制的基本原理 (10)三主电路设计的详细过程 (12)四仿真模型的建立及各模块参数设置 (14)4.1单极性PWM控制发生电路模型 (14)4.2单极性SPWM方式下的单相桥式逆变电路 (16)五、总结 (23)参考文献 (24)七、体会 (25)一逆变电路相关概述1.1 .MATLAB的介绍MATLAB将矩阵运算、数值分析、图形处理、编程技术结合在一起,为用户提供了一个强有力的科学及工程问题的分析计算和程序设计工具,它还提供了专业水平的符号计算、文字处理、可视化建模仿真和实时控制等功能,是具有全部语言功能和特征的新一代软件开发平台。
基于PWM控制的直流可逆调速系统仿真摘要直流调速系统是自动调速系统的主要形式,它具有良好的起、制动性能,可以在较宽的调速范围内实现平滑调速,较快的零动态响应过程,并且低速运转时力矩大的运行性能和控制特性。
本文对基于微机控制的双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调速系统原理出发,逐步建立了双闭环直流PWM调速系统的数学模型,实现对转速、电流双闭环调速系统的控制。
本文采用双极式和受限单极式两种方式的PWM控制模块,建立了双闭环直流PWM调速系统的数学模型,利用MATLAB中的simulink和simpower system对系统进行给定参数下的仿真。
关键词:直流可逆调速;PWM控制模块;双闭环;MATLAB仿真Simulation of DC reversible speed adjusting system based onPWM controlAbstractKeywords:目录1 绪论1.1 PWM控制的现状及分类1.2 选择PWM控制系统的理由1.3 采用转速电流双闭环的理由2 双闭环可逆直流PWM调速系统原理设计2.1 转速、电流双闭环调速系统结构框图2.2 转速、电流双闭环调速系统的组成2.3 电流调节器和转速调节器的设计2.3.1 电流调节器的设计2.3.2 转速调节器的设计3直流PWM可逆调速系统原理3.1 可逆PWM变换器原理3.2 双极式H型PWM变换器原理3.3 受限单极式H型变换器原理4 H桥PWM直流可逆调速系统的仿真4.1 双极式H桥PWM直流可逆调速系统的仿真4.1.1 双极式PWM发生器防真模型4.1.2 双极式PWM双闭环调速系统仿真模型4.2 受限单极式H桥PWM直流可逆调速系统的仿真4.2.1受限单极式PWM调制模块4.2.2 受限单极式PWM双闭环调速系统仿真模型1 绪论1.1 PWM控制的现状及分类而在众多PWM变换器实现方法中,又以H型PWM变换器更为多见。