两种逆变器双环反馈控制技术分析与比较
- 格式:pdf
- 大小:263.21 KB
- 文档页数:4
大功率逆变器输出波形的双环控制夏星煜;邹广平;荣军【摘要】根据大功率高性能逆变器技术要求,提出了一种电压外环,电流内环的双环控制方式,并通过matlab建模仿真验证了其控制方式对逆变器输出波形的改善作用.【期刊名称】《船电技术》【年(卷),期】2015(035)002【总页数】3页(P71-73)【关键词】逆变器;双环控制;PI调节【作者】夏星煜;邹广平;荣军【作者单位】武汉船用电力推进装置研究所,武汉430064;武汉船用电力推进装置研究所,武汉430064;武汉船用电力推进装置研究所,武汉430064【正文语种】中文【中图分类】TM4641 逆变器控制技术概述近些年,逆变器输出波形的控制逐渐成为了研究人员对变换电源研究的热点问题,其控制技术主要解决的问题就是输出带不同的负载条件(纯阻性负载、阻感性负载、阻容性负载等)下能否输出稳定、符合要求的正弦波和在外部干扰突然变化的情况下能否快速、稳定的实现调节。
所以,对实际的变换电源来说,主要看其是否能符合以下两点性能要求:1)稳态时输出电压波形畸变率,基波分量所占比重大并且无相位差,THD 值小等;2)动态特性好,在外部扰动突然变化的情况下能快速实现调节,波形震动小。
目前对逆变器波形控制的技术主要有以下两种方式:1)基于周期波形反馈控制技术,就是采集一个周期内的电压电流波形,然后与标准输出波形作比较,对其进行校正和补偿。
2)基于瞬时值反馈的波形控制技术,就是对逆变器输出波形实时进行检测,把检测回的输出值与参考值作比较来进行调节。
主要包括瞬时值内环反馈控制技术,PID(单内环)控制技术,双闭环控制技术,无差拍控制技术,线性多变量状态反馈控制技术等。
目前,应用最广泛的是 PWM控制技术。
利用数字信号处理器(DSP)方便了建模仿真,用数字化控制系统取代了之前的模拟控制系统,简化了控制系统,为其分析调节提供了可靠性。
2 逆变器双环控制的技术策略2.1 SPWM单相半桥逆变器数学模型三相三线制逆变器,由于其电路结构的对称性,可以把其等效为三个单相逆变器,所以本文在下面的研究对象均是单相半桥逆变器。
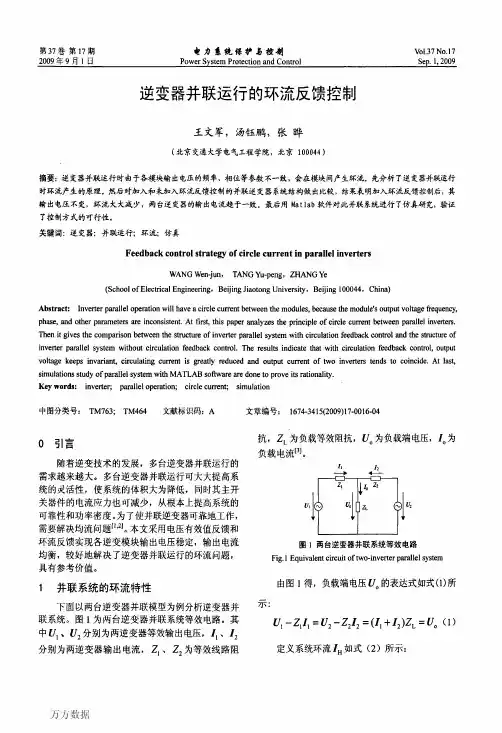
两种典型控制方法在逆变器控制器中的比较0 引言逆变器可以采用的控制方法种类繁多,不同的控制方法都有其独特的优点及适用场合[1][2]。
从控制环路的角度看,可以分为开环控制、单环控制、双环控制以及多环控制。
开环控制无论在静态特性或动态特性方面都无法满足UPS逆变器的要求。
为了获得逆变器输出电压良好的静态和动态特性,可以采用输出电压单环瞬时值反馈控制。
这种控制方法能够实时地调节输出电压的波形,比较好地抑制元器件的非线性特性和直流母线电压波动带来的影响,在一定程度上改善了逆变器的静态和动态特性。
但是由于这种控制方法只有单电压环控制,当负载发生比较大的动态变化时(如负载的电流突然变大),逆变器的输出电压会有比较大的畸变,而且动态调节比较慢。
由于这种系统是二阶振荡环节,负载越轻,动态调整时间越长,且轻载时闭环系统的根轨迹靠近虚轴,系统稳定性差。
为了进一步提高逆变器的控制特性,可以采用双环和多环控制,由于多环控制比较复杂,目前实际应用中采用很少。
双环控制由于控制性能良好,控制方便而得到了较多的应用。
本文针对输出电压和滤波电容电流反馈以及输出电压和滤波电感电流反馈的两种典型双环控制方法进行了对比分析。
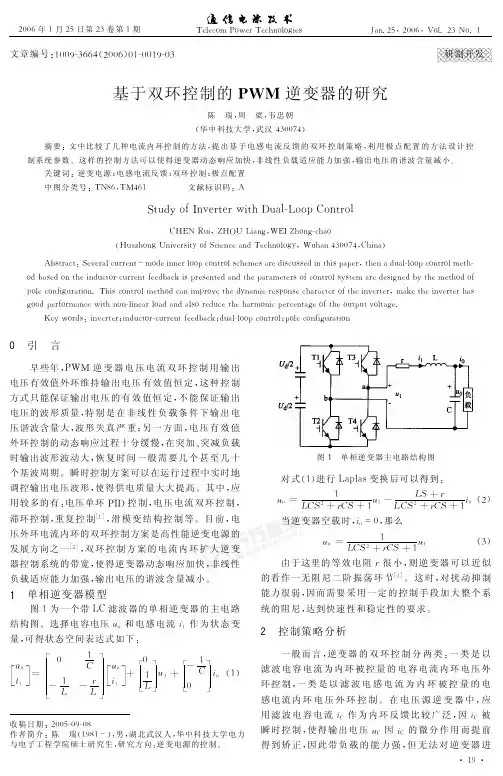
1 两种反馈环路的逆变器控制模型图1是全桥逆变器的主电路图,Vd是直流电压源,S1~S4是4个IGBT开关管,L和C 是滤波电感和滤波电容,用于滤除逆变系统中的高次谐波。
rL和rC是滤波电感和滤波电容的等效串联阻抗。
ZL是负载,负载可以是纯阻性也可以是非线性等。
图1所示的逆变器主电路图由于开关器件的存在是个非线性系统。
但是,当器件的开关频率远远大于逆变器输出电压的基波频率时,可以用状态空间平均和线性化技术来分析。
按照图1所示,可以得到下面的逆变器模型的动态方程:(1)(2)v0=(3)iL=iC+iZ(4)式中:iC,iL,iZ分别是电感、电容、负载的电流。
图1 全桥逆变器的主电路上面的动态方程显示了逆变器中各个量的相互关系。
基于双环控制和重复控制的逆变器研究摘要:研究了一种基于双环控制和重复控制的逆变器控制技术,该方案在电流环和瞬时电压环之外附加了一个重复控制环。
在实现输出电压解耦和扰动电流补偿后,根据无差拍原理设计的双环控制器使逆变器达到了很快的动态响应速度;位于外层的重复控制器则提高了稳态精度。
该方案在一台基于DSPTMS320F240控制系统的PWM逆变器上得到验证。
关键词:逆变器;双环;无差拍;重复控制引言随着闭环调节PWM逆变器在中小功率场合中的大量使用,对其输出电压波形的要求也越来越高。
高质量的输出波形不仅要求稳态精度高而且要求动态响应快。
传统的单闭环系统无法充分利用系统的状态信息,因此,将输出反馈改为状态反馈,在状态空间上通过合理选择反馈增益矩阵来改变逆变器一对太接近s域虚轴的极点,增加其阻尼,能达到较好的动态效果。
单闭环在抵抗负载扰动方面与直流电机类似,只有当负载扰动的影响最终在输出端表现出来以后,才能出现相应的误差信号激励调节器,增设一个电流环限制启动电流和构成电流随动系统也可以大大加快抵御扰动的动态过程。
瞬时值反馈采取提高系统动态响应的方法消除跟踪误差,但静态特性不佳,而基于周期的控制是通过对误差的周期性补偿,实现稳态无静差的效果,它主要分为重复控制和谐波反馈控制。
本文提出了一种基于双环控制和重复控制的逆变器控制方案,兼顾逆变器动静态效应,另外使用状态观测器提高数字控制系统性能。
1 逆变器数学模型单相半桥逆变器如图1所示,L是输出滤波电感,C是输出滤波电容,负载任意,r是输出电感等效电阻和死区等各种阻尼因素的综和。
U是逆变桥输出的PWM电压。
选择电感电流iL和电容电压vc作为状态变量,id看作扰动输入,得到半桥逆变器的连续状态平均空间模型为根据式(1),很容易得到逆变器在频域下的方框图,如图2所示。
PWM逆变器的动态模型和直流电机相似,转速伺服系统的设计方法在这里也适用。
本文借鉴直流电机双环控制技术,并改造成为多环控制系统,在逆变器波形控制上取得了很好的效果。
逆变器电压电流双闭环控制系统设计余裕璞;顾煜炯;和学豪【摘要】逆变器在可再生能源发电中作为连接能量输入与输出负载的装置,发挥着重要作用,采用合适的控制系统可以得到满足后端电能质量需求的电能.针对电压单环控制调整滞后的缺点,补充中间电流反馈环节以提高控制系统的工作频率.比较了电感电流内环与电容电流内环反馈系统的区别,选取负载抗扰动性能更强的电容电流反馈系统,该控制方案对一般及整流性负载的干扰同时具有较强的平抑能力.针对输出电压及电感电流在数学模型上的交叉耦合作用,通过耦合信号前馈削弱其对控制系统的影响.提出一种基于“模最佳”的整定方法,对调节器的参数进行设计,最终利用仿真验证了所提设计方案的有效性.【期刊名称】《电力科学与工程》【年(卷),期】2019(035)003【总页数】7页(P1-7)【关键词】逆变器;双闭环控制;前馈解耦;模最佳【作者】余裕璞;顾煜炯;和学豪【作者单位】华北电力大学能源动力与机械工程学院,北京102206;华北电力大学能源动力与机械工程学院,北京102206;华北电力大学能源动力与机械工程学院,北京102206【正文语种】中文【中图分类】TM7120 引言可再生能源在能源安全、能源总量、能源可靠性、环境无污染等方面均优于传统化石能源[1~3]。
微电网技术是利用可再生能源的主要方式之一[4~6],“就地采集、就地使用”减少了中间环节的损耗,提高能量利用率。
逆变器是微电网中用于电能转换的主要装置[7],保证微网运行可靠性。
逆变器的控制方案不局限于一种[8,9],主要根据其运行目标确定。
在离网运行方式下其运行目标是维持母线电压和频率的恒定,保证负荷的电能质量需求,并网模式下运行一般要求输出给定的有功和无功[10]。
逆变器控制早期采用输出电压瞬时值反馈的单环控制,可以在一定程度上抑制负载的扰动,调节输出电压的波形,但是负载发生较大变化时输出电压畸变严重,其动态响应慢导致电压畸变调整时间长,不利于负载的正常工作。

基于极点配置的逆变器双环控制方案作者:吕永庆赵军红张珍敏来源:《现代电子技术》2009年第22期摘要:介绍一种基于极点配置的逆变器瞬时电压电流PI控制器的设计方法,建立系统模型,为了提高逆变器输出波形的精度,提出了一种基于极点配置的PI双环和重复控制的复合控制方案。
该复合控制方案克服了PI双闭环控制方案带整流性负载时输出电压质量不高的缺点,也解决了嵌入式重复控制方案应用在逆变系统中对逆变器谐振峰值不可控的问题。
仿真表明,所设计的复合控制方案提高了逆变电源带整流性负载时的输出电压质量,该方案既保持了重复控制良好的稳态特性,也明显改善了系统的动态性能。
关键词:逆变器;极点配置;重复控制;双环控制中图分类号:TP274逆变器作为不间断电源的核心部分,广泛用于通信、金融等领域。
一个高性能的逆变器除了要满足体积、重量、电磁兼容等基本指标外,还需满足系统稳定,稳态电压精度高;总谐波畸变率(THD)含量小;动态响应快等要求。
重复控制可以校正逆变器在不同负载时输出电压的精度,具有很好的稳态输出特性,但由于其控制量输出有一个周期的延迟。
动态调节能力不足,而基于极点配置的电感电流内环电压外环反馈控制设计简单、鲁棒性好,但稳态控制精度不高。
因此,实际中常结合两者来协调校正输出波形。
在此提出基于极点配置的电感电流内环电压外环反馈控制方案,提高了逆变器的动态响应能力,然后增加重复控制调节输出电压的稳态精度,这一复合控制方案满足了逆变器的动静态特性、稳态精度,使用Matlab仿真验证了此方案的可行性。
1 逆变器的数学模型控制对象的数学模型是进行理论分析和实验研究工作的出发点和基础。
由于功率开关器件的存在,逆变器本质上是一个非线性系统,分析起来有一定困难。
假设直流母线电压源的幅值恒定,功率开关为理想器件,且逆变器输出的基波频率、滤波器的谐振频率与开关频率相比足够低,则逆变桥可以被简化为一个恒定增益的放大器,从而采用状态空间平均法得到逆变器的线性化模型。
基于准 PR控制和双闭环反馈的单相逆变器控制策略的优化摘要:本文研究了当下微电网在国内外的发展和应用,并讨论了微电网在一些方面的优势。
建立了基于单相逆变器的微电网系统,讨论了孤岛模式下的单相逆变器拓扑结构,采用双闭环反馈控制,根据幅频特性比较了PI,PR和准PR控制在动态性能和稳态误差方面的优劣,最终选用准PR控制对控制策略的优化,实现无静差追踪并增强抗干扰能力,还实现了对并网谐波的优化。
关键词准PR,双闭环控制,H桥逆变器一、引言1.1微电网发展和研究意义随着火电、水电、核电等大型集中电源和超高压远距离输电网的规模不断扩大,电力系统的弊端日益显著,并且在经济发展之余,人们越来越强调清洁高效的可再生能源的开发,于是分布式发电不断发展,为了尽可能地解决大电网和分布式电源之间的冲突,在充分利用分布式电源的情况下减少其对大电网的冲击,学者们提出了微电网的概念。
微电网将发电机、负荷、储能装置和控制装置结合在一起,形成了一个独立的可控的单元。
微电网虽然也是分散供电形式, 但它绝不是对电力系统发展初期的孤立系统的简单回归。
1.2单相光伏微电网控制技术发展理论上,逆变器输出电压中的谐波分量集中在开关频率及其倍数频率为中心的周围,当此谐波被滤波器滤除后,输出电压应为失真度很小的正弦波。
但由于死区效应、非线性负载等因素的影响,会使输出电压波形产生严重的畸变,逆变器输出的电压或电流谐波不仅会造成功率因素降低,影响效率,而且还会引起逆变器自身及其他设备的失调。
这些都需要适当的控制技术来改善逆变电源的性能。
本文提出一种改进策略,该策略电流内环采用电感电流瞬时反馈和负载扰动前馈相结合的PI控制、电压外环采用准PR控制,既有抗输出扰动能力也能减少并网谐波,还能实现零稳态误差。
二、单相逆变器双闭环策略2.1逆变器的双闭环控制策略我们首先考虑电流内环的反馈控制量,一般的电流内环反馈控制量如上所述,分为电感电流或者电容电流,利用电容电流作为控制量虽然可以利用其超前控制作用,实现提前校正,相对于电感电流控制有更好的对于扰动的抑制作用,但却无法对经过逆变器的电流进行保护,当然,电感电流为控制量的内环控制也可在一定侧面提高动态性能。
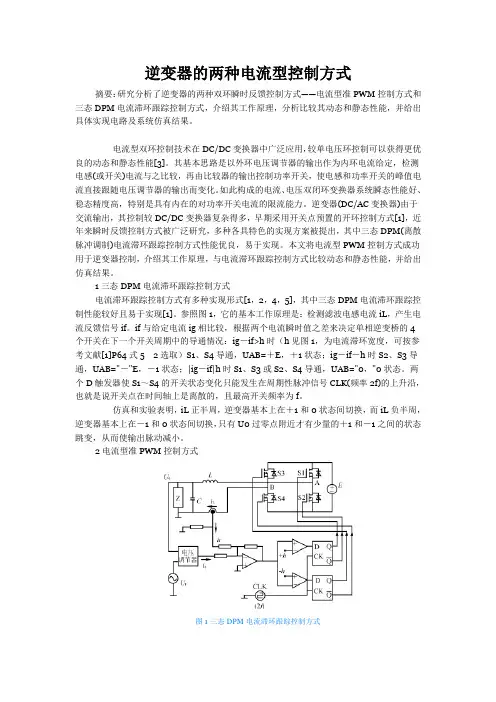
逆变器的两种电流型控制方式摘要:研究分析了逆变器的两种双环瞬时反馈控制方式——电流型准PWM控制方式和三态DPM电流滞环跟踪控制方式,介绍其工作原理,分析比较其动态和静态性能,并给出具体实现电路及系统仿真结果。
电流型双环控制技术在DC/DC变换器中广泛应用,较单电压环控制可以获得更优良的动态和静态性能[3]。
其基本思路是以外环电压调节器的输出作为内环电流给定,检测电感(或开关)电流与之比较,再由比较器的输出控制功率开关,使电感和功率开关的峰值电流直接跟随电压调节器的输出而变化。
如此构成的电流、电压双闭环变换器系统瞬态性能好、稳态精度高,特别是具有内在的对功率开关电流的限流能力。
逆变器(DC/AC变换器)由于交流输出,其控制较DC/DC变换器复杂得多,早期采用开关点预置的开环控制方式[1],近年来瞬时反馈控制方式被广泛研究,多种各具特色的实现方案被提出,其中三态DPM(离散脉冲调制)电流滞环跟踪控制方式性能优良,易于实现。
本文将电流型PWM控制方式成功用于逆变器控制,介绍其工作原理,与电流滞环跟踪控制方式比较动态和静态性能,并给出仿真结果。
1三态DPM电流滞环跟踪控制方式电流滞环跟踪控制方式有多种实现形式[1,2,4,5],其中三态DPM电流滞环跟踪控制性能较好且易于实现[1]。
参照图1,它的基本工作原理是:检测滤波电感电流iL,产生电流反馈信号if。
if与给定电流ig相比较,根据两个电流瞬时值之差来决定单相逆变桥的4个开关在下一个开关周期中的导通情况:ig-if>h时(h见图1,为电流滞环宽度,可按参考文献[1]P64式5 2选取)S1、S4导通,UAB=+E,+1状态;ig-if-h时S2、S3导通,UAB="-"E,-1状态;|ig-if|h时S1、S3或S2、S4导通,UAB="0,"0状态。
两个D触发器使S1~S4的开关状态变化只能发生在周期性脉冲信号CLK(频率2f)的上升沿,也就是说开关点在时间轴上是离散的,且最高开关频率为f。

改进的单相全桥逆变器双环控制研究作者:杨庆江聂丽萍来源:《现代电子技术》2015年第03期摘要:双环控制外环为电压环,而内环则分为电感电流内环和电容电流内环。
在此对这俩种方法的不同之处进行了理论分析,为了改善该种控制系统在抗负载扰动方面的不足,在双环控制的基础上引入了负载电流前馈的设置。
通过负载电流前馈控制的设置,有效地提高了该种控制抗负载的扰动性能,从而增强了系统的稳定性和改善了逆变器电压输出波形质量。
关键词:双环控制;电感电流;电容电流;负载前馈中图分类号: TN710⁃34; TM464 文献标识码: A 文章编号: 1004⁃373X(2015)03⁃0155⁃03Research on improved double⁃ring control of single⁃phase full bridge inverterYANG Qing⁃jiang1, NIE Li⁃ping2(1. College of Electronics and Information Engineering, Heilongjiang University of Science &Technology, Harbin 150027, China;2. College of Electrical and Control Engineering, Heilongjiang University of Science&Technology, Harbin 150027, China)Abstract:The outer⁃ring of the double⁃ring control system is voltage ring, and its inner ring is divided into inductance current inner⁃ring and capacitive current inner⁃ring. The difference between the two kinds of methods is analyzed theoretically in this paper. On the basis of thedouble⁃ring control, a load current feed⁃forward setup is introduced to improve the performance of the control system effectively in the aspect of resistance to load disturbance. With the load current feed⁃forward control setup, the stability of the system was enhanced and the quality of inverter output voltage waveform was improved.Keywords: double⁃ring; inductor current inner ring; capacitive current inner ring; load feed forward0 引言逆变器是逆变电源系统的核心,对其输出的电压波形质量要求较高,特别是当负载是非线性负载的情况下,要求电压输出波形仍为正弦波。
基于逆变电源双闭环控制系统的探讨作者:丁星来源:《科学导报·科学工程与电力》2019年第02期【摘要】现在无线通信技术被广泛应用在各个行业中,同时电能在其中具有无可替代的作用。
为了使电能可以最大化的利用,电力能源要进行能源交换,这个过程是通过电力电子技术完成的,逆变电源电压输出波形主要有三个方面,分别是稳态精度高、动态性能好以及负载适应性强,逆变电源为了满足这个需求设置了双闭环回路。
逆变电源双闭环系统有很多优点,比如节约能源、减少成本、提高工作质量等。
【关键词】电力电子;逆变电源;双闭环回路控制一、逆变电源控制方法介绍在现代的社会中,人们追寻在保证质量的同时追求速度,电能在各个行业中都起到了一定的影响,尤其是在石油化工生产中。
为了最大化的利用电能,电子能源需要进行能量交换,这个过程是通过电力电子技术完成的。
然后被广泛应用于各个行业,这样可以有效节约能源、减少成本、降低环境污染等。
在1964年,有学者曾提出脉宽调制变频的思想,它主要是将电网恒压恒频交流电变为可变电流,原理是在PWM逆变器上加入电压源,这个电压源是由不可控整流器整流经电流滤波形成的,在回路中安装控制逆变器开关组件来控制通断,最后逆变器将直流电逆变成幅值频率可变的交流电。
脉宽调制方式是决定开关组件通断时刻和顺序,改变脉宽可调节逆变器输出基波的幅值,改变可调节的频率。
我们对电压瞬时值单环反馈控制、电流滞环控制、电压双环反馈控制三种逆变器控制方法作出了分析和探究。
1.电压瞬时值单环反馈控制主要是为了解决电压平均值反馈中存在的问题,换种方式就是采用电压平均值反馈系统,该系统的动态反应速度比较慢,负载适应性也比较差。
在系统中采用了电压瞬时值反馈控制策略,这是为了实现输出电压的波形控制。
采样变压器会减低逆变器输出的电压值,让系统的电压始终保持在平均值上下。
输出电压和给定电压之间会存在或大或小的误差,产生的误差会经过PI电压调节器,输出信号与正弦信号通过相关的计算来调整信号的幅值,所得的结果被作为某些数据的基准,比如瞬时值反馈。
一种单相电压型逆变器双环控制刘俊伟【摘要】文章以单相电压型逆变器为研究对象,给出了一种逆变器双环控制策略。
首先,基于单相电压型逆变器的主拓扑结构,建立了相应的数学模型,同时建立了逆变器传递函数框图。
其次,给出了相应的双环控制结构,该结构为内、外环均为比例控制。
在此基础上,采用极点配置法设计了相应的控制参数取值范围。
实验结果表明,文章所给的双环控制方法具有较好的动态控制响应和稳态控制性能。
%This paper taking the single-phase voltage inverter as the research object, an dual-loop control strategy is given. First of all, based on the main topology structure of single-phase voltage source inverter, mathematical model of the inverter is established, at the same time, transfer function block diagram is established. Then, giving the corresponding dual loop control structure, the structure for the inner and outer loop is proportional control. On above basis, the pole assignment method is used to design the control parameters. The experimental results show that the dual-loop control method has good dynamic response and steady state control performance.【期刊名称】《江苏科技信息》【年(卷),期】2016(000)027【总页数】3页(P64-66)【关键词】单相电压型;全桥逆变器;双环控制;比例控制【作者】刘俊伟【作者单位】陕西理工大学,陕西汉中 723000【正文语种】中文电压型逆变器作为电力电子的一个重要组成部分,被广泛应用于新能源发电、不间断电源、通信系统等重要场合,成为国民生产生活的关键设备[1-3]。
逆变器电压电流双环控制设计及研究孙静;曹炜;苏虎;杨道培【摘要】在三相逆变器系统中,设计了电流内环、电压外环PI-PI控制器.根据逆变器及其控制系统的结构建立了双环控制系统简化数学模型,确定了传递函数.引入工程算法设计了电流内环,用bode图、阶跃响应优化了电流内环和电压外环的设计参数.将PI-PI控制系统置于Matlab/Simulink中进行时域仿真,对比分析了该控制系统与P-PI控制系统的性能.结果表明,所设计的PI-PI控制系统提高了逆变器系统稳态性能,改善了电压质量,限制了短路电流大小.【期刊名称】《上海电力学院学报》【年(卷),期】2015(031)002【总页数】6页(P121-126)【关键词】PI-PI控制;工程算法;bode图;阶跃响应;电压质量;过流限制【作者】孙静;曹炜;苏虎;杨道培【作者单位】上海电力学院电气工程学院,上海200090;上海电力学院电气工程学院,上海200090;上海电力学院电气工程学院,上海200090;上海电力学院电气工程学院,上海200090【正文语种】中文【中图分类】TM464;TM933.4微网通常使用可再生能源以及能够提高能源利用效率的燃气冷热电三联供发电.为使微网具有更好的控制性能,微网中也普遍配置储能装置.上述装置通常使用逆变器将直流或其他频率的交流转换为工频交流后再接入微网,并对其输出电压、电流波形有较高要求.高质量的波形要求逆变器系统在保证稳态性能的同时,还要保证总谐波畸变率(即THD)尽可能的低.许多文献都采用电流P和电压PI的双环控制策略,但是此控制策略不能减小电流的稳态误差,THD相对较大,而且当系统出现大扰动或者短路情况时起不到限流的作用.[1-2]文献[1]基于状态空间理论提出了一种新的电流PI和电压PI的双环控制策略(即PI-PI);文献[3]对双PI控制系统直接离散化后利用极点配置的方法设置了控制系统参数,分析了在空载、满载、过载时PI-PI控制的时间响应;文献[4]基于状态空间算法在单相逆变器下对比分析了P-PI 控制策略与PI-PI控制策略的THD和电流峰值.本文首先对三相对称逆变器系统进行d-q轴完全解耦,然后将工程方法与bode 图相结合,设计分析了PI-PI控制器的各个参数,使等效输出阻抗成感性.[5-6]时域仿真结果验证了该设计在负荷变动时能够保证系统的电压、总谐波畸变率在要求的范围内,从而改善了电压质量,提高了系统的稳态性能.此外,当微网系统发生短路时也能有效地控制短路电流.1 逆变器及其控制系统本文采用三相逆变器,其原理如图1所示,主要包括空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)模块、LC 滤波器、双环控制模块等. 图1 逆变器及其控制系统示意注:L—滤波电感;C—滤波电容;Rn—负荷;Ud—负载电压;iod—负载电流—d轴参考电压;—q轴参考电压.SVPWM算法简单且适合数字化实现,可以减少逆变器输出电压的谐波,提高对电压源逆变器直流供电电源的利用率.[7-8]逆变器的输出电压会在开关频率处产生谐波,需要采用滤波器加以滤除.滤波器参数选为L=3 mh,C=1 500 μF,保证滤波电感上的压降不超过系统电压的3%.[9-11]本文重点探讨电压电流双环控制模块的设计和参数设置.2 电压电流双环控制模块设计对于整个逆变电源系统,控制系统与主电路同样重要,只有这两部分相互配合,共同正常工作,才能构成高性能的逆变系统,输出较高质量的波形.本文的电压电流双环控制系统采用 PI-PI控制器,利用工程设计方法与bode图及阶跃响应曲线相结合的方式,对控制系统的参数进行设计.2.1 双环解耦设计本文所研究的abc三相逆变器数学模型是多输入多输出系统,为了有效调节逆变器输出的有功功率和无功功率,需要引入坐标变换,将abc三相模型转换到两相d-q坐标系下,但电压、电流在d轴和q轴间存在严重耦合.在电流解耦时,文献[12]和文献[13]经过分析计算,将d轴的电感电流耦合量ildωL叠加到q轴的电压上,以消除控制对象中d轴电感电流对q轴电压的影响;在电压解耦时,采用的是完全解耦法,[14]即将uodωC乘上一个控制量 Q(S),[12](其中 Q(S)满足Q(S)/(Ls+r)=1),以消除控制对象中d轴电压对q轴电流的影响.由于d轴和q轴是对称的,q轴的电压、电流对d轴电流、电压的影响亦用此方法解耦.2.2 双环控制参数的设计电压电流双环控制均采用PI-PI控制器,如果按常规方法设计其参数,需考虑两个控制器之间的响应速度、频带宽度的相互影响与协调等,控制器设计步骤复杂,还需要反复试凑验证.因此,本文的电流内环采用工程设计方法以降低计算的复杂性,电压外环采用频域bode图与阶跃响应相结合的方法以减少实验过程中反复试凑验证的次数.2.2.1 工程设计算法原理工程设计算法一般是用系统的开环传递函数来确定闭环系统的参数,使闭环系统具有良好的稳定性.一般来说,控制系统的开环传递函数为:式中:K——开环增益;τ,T——时间常数;分母中的s——该系统在原点处有r重极点,根据 r=0,l,2,3…的不同数值,分别称作0型、1型、2型、3型……系统,为了保证稳定性和较好的稳态精度,多用1型和 2 型系统.[15]典型1型系统的传递函数为:式(2)中有两个参数:开环增益K和时间常数T,T是系统固有的,所以只要调节K,就可以调整系统的超调量与动态响应,一般取 K=0.5.[15]典型2型系统的传递函数为:引入中间变量h:式中:h——伯德图-20 db/dec的中频段的宽度.由工程经验数据可知,h的取值应在2~10,当h变大时,系统的超调量会减少,但响应速度也会相应降低.如果既要保证系统的超调不会很大,又保证系统的快速性,可取h=5左右.2.2.2 电流内环设计很多文献中电流环都采用P控制器,但该控制器电流环存在稳态误差,而且在短路时起不到限流的作用.本文的电流环采用PI控制器,使其在保证响应速度、提高电流环控制精度的同时,在短路时还能起到限流的作用.d轴和q轴进行完全解耦后,两轴均为对称的.将图1中逆变器、LC滤波器、SVPWM模块、电流环进行等效简化,d轴简化后的控制原理框图如图2所示.根据对称原理,相应的q轴原理图与其相仿.图2的开环的传递函数模型可表示为:式中:K ip——PI中的积分系数;K i——PI中的比例系数;Ts——调制开关周期;U DC——直流侧电压;K pwm——SVPWM 等效增益.图2 电流环简化模型注:Kpwm/(1.5Tss+1)—SVPWM 的等效模块;UDC/2—逆变器模块;Ki+(Kip/s)—电流环模块;1/Ls,1/Cs—滤波环节.由式(3)对比式(5)可知,电流内环的传递函数为2型.进一步对比式(3)和式(5),并且引入式(4)可得:由于 h,Ts,L,U DC,K pwm,τ 均为已知,将这些已知参数代入式(6)、式(7)和式(8),即可确定电流环PI控制的积分系数 K ip和比例系数K i,但由于采用了经验数据,且在系统传递函数的计算过程中存在简化环节,因此在后续仿真中需要对参数进行优化和系统性能校核.2.2.3 电压外环设计本文的电压环采用的是PI控制器,使逆变器输出电压为设定值.将图1中逆变器、LC滤波器、SVPWM模块、电流环、电压环进行等效,则电压环的模型框图如图3所示.图3 电压电流环控制示意注:K v+(K vp/s)—电压环的PI控制器;K vp—电压环PI 控制器的积分系数;K v—电压环中PI控制器的比例系数;iLd—电感电流;U*d—参考电压.图3电压环的闭环传递函数为:其中的电压增益系数为:式中:Ud/iLd的等效输出阻抗为:式中:式(9)中的电压增益系数K1体现了系统对电压设定值的跟踪性能,等效输出阻抗Z(s)体现了电流对控制系统输出扰动特性.3 PI-PI控制系统参数优化虽然根据上述方法可以对双环控制器的参数进行理论计算设置,但还需要对控制器的动态性能进行多方面的考察,以使控制器达到更好的性能水平.本文对系统的参数设置如下:直流侧电压U DC为 500 V;滤波电感 L为 3 mH;电容 C为1 500 μF,SVPWM 等效增益 Kpwm为 1,调制开关周期 Ts为2 ×10-4 s.3.1 电流环参数的优化将上述系统参数代入式(6)、式(7)和式(8),即可确定电流环参数 K ip=16,Ki=12.为了进行电流环参数的优化,当 K ip=16,K i取不同数值时,电流环性能数据如表1所示.仿真结果表明,当Kip=16,Ki分别取不同的数值时,相位裕量的取值范围为17~35,穿越频率的取值范围为 103.35 ~ 103.7,超调量的取值范围为 13% ~16.5%,响应时间为0.6 ×10-3~1.5 ×10-3 s.综合考虑后,选取 K ip=16,Ki=20 作为电流内环的参数,这样既可以提高响应速度,又可以保证系统的稳态性能.表1 电流环动态性能数据K i 相位裕量/(°)穿越频率/(r ad·s-1)超调量/%响应时间/s 12 35 103.35 13.0 1.5 × 10-3 20 28 103.5 14.0 0.9 ×10-3 50 17 103.7 16.5 0.6 × 10-33.2 电压环参数的优化根据电流内环优化参数 K ip=16,K i=20及式(12)、式(13)和式(14),通过阶跃响应曲线及其bode图确定参数K v和K vp,仿真结果如图4所示.图4 电压环动态性能图4 a表明,当K v=2,K vp=7时系统的震荡、超调都很大,系统响应速度慢;但当 K v≥15,K vp=7时系统的超调降低,响应速度变快,因此系统的K v应取大于等于15的数值.此外,当K vp≥7时,bode图在50 Hz时等效输出阻抗接近感性.经过不断试验验证,当K v=15,K vp=7时,系统达到最佳状态,超调量<15%,此时稳态性能好,响应速度快.4 逆变器供电系统性能时域仿真验证4.1 系统稳态性能和电压质量仿真分别将电压电流双环PI-PI控制器和P-PI控制器置于用Matlab/Simulink搭建的图1所示逆变器供电系统中,分别在额定负荷(30 kW)、突加无功负荷、有功负荷、综合负荷4种情况下,分析系统的稳态性能与电压质量.PI-PI控制系统与P-PI控制系统的d轴和q轴参考电压分别为:系统双环控制参数为Ki=20,Kv=15,Kvp=7;P-PI系统的双环控制参数为:Ki=5,Kv=10.仿真结果如表2所示.由表2可知,PI-PI系统比P-PI系统的稳态性能更好,电压质量也更高.表2 THD及稳态电压对比/V PI-PI系统额定负载 0.02 220.0项目 THD/% 稳态电压P-PI系统额定负载 0.03 220.2 PI-PI系统突加无功负荷 0.02 220.1 P-PI系统突加无功负荷 0.05 220.4 PI-PI系统突加有功负荷 0.07 220.0 P-PI系统突加有功负荷 0.11 220.1 PI-PI系统突加综合负荷 0.02 220.0 P-PI系统突加综合负荷0.08 220.34.2 自限流功能当负荷突然加大或者出现短路情况时,在PIPI双环控制器加入限幅环节后能起到限流作用,保证换流装置不被损坏,其对应框图如图5所示.P-PI控制器即使在对应位置加入限幅环节也不具有此功能,仿真结果对比如图6所示.图5 加入限幅环节的双环控制图6 自限流功能对比情况图6 a为在0.1 s时系统短路,PI-PI系统加入限幅环节和无限幅环节,在短路的瞬间都出现很大的电流,但加入限幅环节后能非常快地将电流限定在规定的范围内(允许的最大电流值为100 A);而图6b显示在0.1 s时系统短路,即使加入限幅环节,P-PI双环控制下的输出稳态电流也远超限定电流100 A,幅值约在200 A.5 结论(1)利用工程算法与bode图、阶跃响应相结合的方式,快速地确定了PI-PI控制器参数.(2)分别对电压电流双环 PI-PI控制器和P-PI控制器构成的逆变器供电系统用Matlab/Simulink进行了时域仿真验证,仿真结果表明,PI-PI控制系统减少了电压误差,降低了逆变器输出电压的THD,而且该系统还具有限流功能,当出现大电流时能将电流值稳定在规定的范围内,保护逆变器的供电系统不被损坏.由此表明,PI-PI控制系统的性能优于 P-PI控制系统.参考文献:【相关文献】[1]彭力.基于状态空间理论的PWM逆变电源控制技术研究[D].武汉:华中科技大学,2004.[2]张淳.含逆变型分布式电源的微网控制策略研究[D].杭州:浙江大学,2013.[3]王淑慧,彭力.基于状态空间的溯逆变器的数字双环控制方法研究[J].电力电子,2008(5):44-50.[4]何俊,彭力.PWM 逆变器双环控制研究[J].通信电源技术,2007,32(25):2-8.[5]肖朝霞,王成山,王守相,等.微网分布式电源逆变器的多环反馈控制策略[J].电工技术学报,2009,24(2):100-107.[6]王成山,高菲,李鹏,等.低压微网控制策略研究[J].电机工程学报,2012,32(25):2-8.[7]张纯,陈民轴,王振存,等.微网运行模式平滑切换的控制策略研究[J].电力系统保护与控制,2011,39(20):1-6.[8]肖朝霞.微网控制及运行特性分析[D].天津:天津大学,2008.[9]杨淑英,张兴,张崇巍.基于下垂特性的逆变器并联技术研究[J].电工电能新技术,2006(2):34-40.[10]艾欣,金鹏,孙英云,等.一种改进的微电网无功控制策略[J].电力系统保护与控制,2013,41(7):147-155.[11]杨秀,藏海洋,宗翔,等.微电网分散协调控制策略设计与仿真[J].华东电力,2011(11):24-30.[12]胡媛媛.三相三线逆变器数字控制系统研究[D].武汉:华中科技大学,2008.[13]赵巍.微网综合控制技术研究[D].南京:南京理工大学,2013.[14]CHANDORKAR M C,DIVAN D M,ADAPA R.Control of parallel connected inverters in standalone ac supply systems[J].IEEE Trans. on Industry Applications,1993,29(1):136-141.[15]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003:120-150.。