基于BP神经网络优化的PID控制器研究
- 格式:doc
- 大小:18.00 KB
- 文档页数:4
基于BP神经网络的PID控制系统设计一、引言PID(Proportional-Integral-Derivative)控制器是一种常用的自动控制器,其通过测量系统的输出偏差,根据比例、积分和微分三个因素来控制系统的输出。
然而,传统的PID控制器难以适应复杂、非线性和时变的系统,对于这类系统的控制,神经网络已经被证明是一种有效的方法。
本文将介绍基于BP神经网络的PID控制系统设计。
二、BP神经网络简介BP神经网络(Backpropagation Neural Network)是一种常用的前向反馈型人工神经网络,其通过反向传播算法来训练网络参数,从而实现对输入数据的学习和预测。
BP神经网络拥有多层神经元,每个神经元都与下一层神经元相连,并通过权重和阈值来传递和处理输入信息。
三、PID控制器简介PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个部分组成,其控制输出的公式为:u(t) = Kp * e(t) + Ki * ∑e(t)dt + Kd * de(t)/dt其中,u(t)为控制器的输出,Kp、Ki、Kd为控制器的三个参数,e(t)为系统的输出偏差,∑e(t)dt为偏差的积分项,de(t)/dt为偏差的微分项。
1.数据采集和预处理:首先需要采集系统的输入和输出数据,并对其进行预处理,包括数据归一化和滤波处理等。
2.神经网络设计和训练:根据系统的输入和输出数据,设计BP神经网络的结构,并使用反向传播算法来训练网络参数。
在训练过程中,根据系统的输出偏差来调整比例、积分和微分三个参数。
3.PID控制器实现:根据训练得到的神经网络参数,实现PID控制器的功能。
在每个控制周期内,根据系统的输出偏差来计算PID控制器的输出,将其作为控制信号发送给被控制系统。
4.参数调优和性能评估:根据控制系统的实际情况,对PID控制器的参数进行调优,以提高系统的控制性能。
基于BP神经网络的PID控制器设计PID控制器是一种常用的控制器,可以通过根据系统的误差、历史误差和误差的变化率来计算控制信号,从而实现对系统的控制。
传统的PID控制器可以通过调节PID参数来实现对系统动态特性的控制,但是参数调节过程往往需要经验和反复试验,而且很难实现对非线性系统的精确控制。
近年来,基于BP神经网络的PID控制器设计方法得到了广泛的关注。
BP神经网络是一种常用的人工神经网络模型,可以通过训练得到输入与输出之间的映射关系。
在PID控制器设计中,可以将误差、历史误差和误差的变化率作为BP神经网络的输入,将控制信号作为输出,通过训练神经网络来实现对控制信号的合理生成。
1.数据预处理:首先需要采集系统的输入输出数据,包括系统的误差、历史误差和误差的变化率以及相应的控制信号。
对这些数据进行归一化处理,以便神经网络能够更好地学习和训练。
2.网络结构设计:根据系统的特性和要求,设计BP神经网络的输入层、隐藏层和输出层的神经元数量。
通常情况下,隐藏层的神经元数量可以根据经验设置为输入层和输出层神经元数量的平均值。
3.训练网络:采用反向传播算法对神经网络进行训练,以获得输入和输出之间的映射关系。
在训练过程中,需要设置学习率和动量系数,并且根据训练误差的变化情况来确定训练的终止条件。
4.参数调整:将训练得到的神经网络与PID控制器相结合,根据神经网络的输出和系统的误差、历史误差和误差的变化率来计算控制信号,并通过对PID参数的调整来实现对系统的控制。
1.适应能力强:BP神经网络能够通过训练来学习系统的动态特性,从而实现对非线性系统的精确控制。
2.自适应性高:BP神经网络能够根据实时的系统状态来实时调整控制信号,从而实现对系统动态特性的自适应控制。
3.参数调节方便:通过BP神经网络的训练过程,可以直接得到系统的输入和输出之间的映射关系,从而减少了传统PID控制器中参数调节的工作量。
4.系统稳定性好:基于BP神经网络的PID控制器能够根据系统状态及时调整控制信号,从而提高了系统的稳定性和鲁棒性。
基于BP神经网络的PID控制系统设计一、引言PID控制系统是目前工业控制中广泛应用的一种基本控制方法,它通过测量控制系统的偏差来调节系统的输出,以实现对控制对象的稳定控制。
然而,传统的PID控制器需要事先对系统建模,并进行参数调整,工作效果受到控制对象模型的准确性和外部干扰的影响。
而BP神经网络具有非线性映射、自适应性强、鲁棒性好等优点,可以有效地克服传统PID控制器的缺点。
因此,基于BP神经网络的PID控制系统设计成为当前研究的热点之一二、基于BP神经网络的PID控制系统设计理论1.PID控制器设计原理PID控制器是由比例环节(Proportional)、积分环节(Integral)和微分环节(Derivative)组成的控制器,其输出信号可以表示为:u(t) = Kp*e(t) + Ki*∫e(t)dt + Kd*(de(t)/dt),其中e(t)为控制系统的输入偏差,t为时间,Kp、Ki和Kd分别为比例系数、积分系数和微分系数。
2.BP神经网络理论BP神经网络是一种前馈型神经网络,通过反向传播算法对输入信号进行学习和训练,从而得到最优的网络结构和参数。
BP神经网络由输入层、隐层和输出层组成,其中每个神经元与上、下相邻层之间的神经元互相连接,并具有非线性的激活函数。
3.基于BP神经网络的PID控制系统设计理论基于BP神经网络的PID控制系统设计的核心思想是将BP神经网络作为PID控制器的自适应调节器,根据控制对象的输入信号和输出信号之间的误差进行训练和学习,通过调整BP神经网络的权重和阈值来实现PID 控制器的参数调节,从而提高控制系统的稳定性和鲁棒性。
三、基于BP神经网络的PID控制系统设计步骤1.系统建模首先,需要对待控制对象进行建模,获取其数学模型。
对于一些复杂的非线性系统,可以采用黑箱建模的方法,利用系统的输入和输出数据进行数据拟合,获取系统的数学模型。
2.BP神经网络训练将系统的数学模型作为BP神经网络的训练集,通过反向传播算法对BP神经网络进行训练,得到最优的网络结构和参数。
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。
2.通过实验掌握神经网络自整定PID的工作原理。
3.了解神经网络的结构对控制效果的影响。
4. 掌握用Matlab实现神经网络控制系统仿真的方法。
二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。
这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。
但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用神经网络控制的方法。
利用神经网络的自学习这一特性,并结合传统的PID控制理论,构造神经网络PID控制器,实现控制器参数的自动调整。
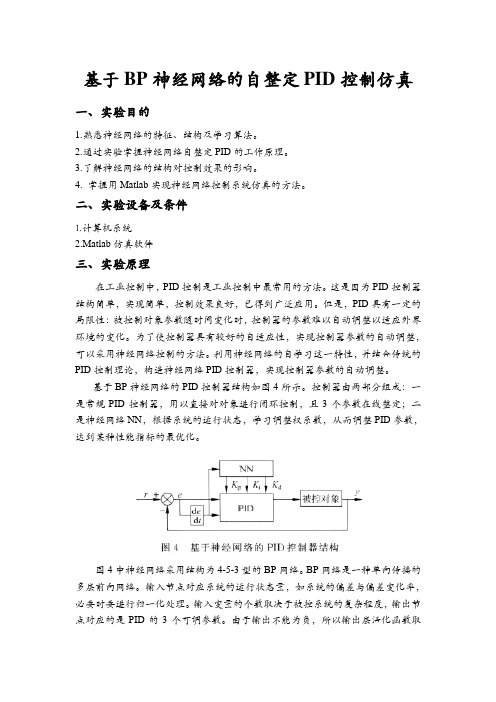
基于BP神经网络的PID控制器结构如图4所示。
控制器由两部分组成:一是常规PID控制器,用以直接对对象进行闭环控制,且3个参数在线整定;二是神经网络NN,根据系统的运行状态,学习调整权系数,从而调整PID参数,达到某种性能指标的最优化。
图4中神经网络采用结构为4-5-3型的BP网络。
BP网络是一种单向传播的多层前向网络。
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理。
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是PID的3个可调参数。
由于输出不能为负,所以输出层活化函数取2()(1)()(1)1(1)a k y k y k u k y k -=+-+-非负的Sigmoid 函数,隐含层取正负对称的Sigmoid 函数。
本系统选取的BP 网络结构如图5所示。
网络的学习过程由正向和反向传播两部分组成。
如果输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最小。
输出层节点分别对应3个可调参数K p 、K i 、K d 。
第十六届电工理论学术研讨会论文集基于BP神经网络的PID控制器的研究与实现张建国.(漳州职业技术学院电于工程系福建漳州363000)摘要:本文介绍基于BP神经网络的PID控制器的实现方法,可以在一定程度上解决传统PID调节器不易在线实时整定参数、难于对一些复杂过程和参数幔时变系统进行有效控制等问题。
一r一关键词:PID控制;神经网络;研究O引言PID控制要取得好的控制效果,必须寻找比例、积分和微分三种控制作用在形成控制量中相互配合又相互制约的关系,这种关系不一定是简单的“线性组合”,要在变化无穷的非线性组合中找出最佳的关系并非易事。
为此,本文试图利用神经网络所具有的:①能够充分逼近任意复杂的非线性关系,从而形成非线性动力学系统,以表示某种被控对象的模型或控制器模型;②能够学习和适应不确定性系统的动态特性;⑨所有定量或定性的信息都分布储存于网络内的各神经单元,从而具有很强的容错性和鲁棒性;④采用信息的分布式并行处理,可以进行快速大量运算等特点,把神经网络引入传统的PID控制,可以在一定程度上解决传统PID调节器不易在线实时整定参数、难于对一些复杂过程和参数慢时变系统进行有效控制等问题。
1基于BP神经网络的PID控制器BP神经网络具有逼近任意非线性函数的能力,而且结构和学习算法简单明确。
通过神经网络自身的学习,可以找到某一最优控制律下的P、I、D参数。
基于BP神经网络的PID控制系统结构如图1所示。
控制器由两个部分组成:①经典的PID控制器:直接对被控对象过程闭环控制,并且三个参数KP、KI、KD为在线整定式;②神经网络NN:根据系统的运行状态,调节PID控制器的参数,以期达到某种性能指标的最优化。
即使输出层神经元的输出状态对应于PID控制器的三个可调参数KP、KI、KD,通过神经网络的自身学习,加权系数调接,从而使其稳定状态对应于最优控制律下的PID控制器参数。
经典增量式数字PID的控制算式为u(k)=-u(k-1)+KP[e(k)-e(k-1)】+kIc(k)+kDEe(k)-2e(k-1.)+e(k.2)】(1)式中KP、KI、Kd一比例、积分、微分系数。

- 22 -高 新 技 术从本质上来看,PID 控制算法就是对比例、积分和比例微分间的关系进行控制的一种算法。
PID 控制调节器具有适应性强、鲁棒性良好的特征,因此被广泛应用于工业控制领域。
但是,随着科学技术、控制理论发展,在工业生产中被控对象逐渐向复杂化和抽象化的趋势发展,并呈现滞后性、时变性和非线性的特征,这使传统PID 控制器难以精准调控这种较复杂的控制系统。
为了解决该问题,研究人员将控制理论与其他先进的算法相结合,形成全新的控制理论,包括神经网络控制、遗传算法以及模糊控制等。
对神经网络算法来说,由于其具有较高的鲁棒性和容错性,因此适用于复杂的非线性控制系统中,并且具有广阔的应用前景和较大的发展潜力。
1 BP 神经网络结构及算法BP 神经网络将网络视为一个连续域,在这个网络中,输入层和输出层都是任意时刻、任意数目的样本值,网络输出层值与输入层值间也可以具有任意关系,这个学习过程就称为BP 神经网络学习过程。
作为一种被广泛应用的神经网络模型,BP 神经网络由输入层、输出层和隐含层组成:1) 输入层。
从第i 个输入向量中产生相应的输出值。
2) 输出层。
在输出值的作用下将其转换为输入数据。
3) 隐含层。
在输出值的作用下对数据进行隐含处理,将处理后的结果反馈给输入层,3个输入层构成1个BP 神经网络。
当输入数据在时间域内经过多次的误差传播时,最后被一个误差源作为输出信号,即经过输入单元和输出组的中间信息。
如果该误差源的误差小于输出单元和输出组中各单元间的误差,那么这些单元在计算输出时就会有很大的变化;如果超过了期望值,那么这一单元被认为是输入量存在误差(也就是输入信号存在误差),将不再使用该单元;如果仍然超过期望值,那么输出量又会存在误差[1]。
通过分析输入与输出量间的关系可以得出BP 网络中各个隐藏层上节点数与该输出量间的关系。
BP 神经网络的拓扑结构如图1所示。
为了对BP 神经网络进行运算和优化,该文设定了中间层的加权和结点临界,以便将全部采样的真实输出量与预期的输出量的偏差控制在一个很低的区间,并且通过调节这个区间来保证它的稳定性。
基于BP神经网络的PID控制器的设计简介:PID控制器是一种常用的控制方法,可以使控制系统快速、稳定地对目标进行调节。
然而,传统的PID控制器需要依赖经验的设置参数,很难适用于非线性复杂的系统。
为了改善这一问题,本文提出了一种基于BP神经网络的PID控制器的设计方法。
一、神经网络介绍BP神经网络是一种常用的人工神经网络,通过反向传播算法进行学习和适应。
它可以用来建模非线性关系、解决分类和回归问题等。
BP神经网络由输入层、隐藏层和输出层构成,通过调整权重和偏置项,使得网络的输出接近于期望输出。
二、PID控制器的基本原理PID控制器是由比例(P)、积分(I)和微分(D)三个部分组成的,它们分别对应了系统的比例性能、整定性能和微分性能。
PID控制器的输出是由目标值与实际值之间的误差来决定的。
比例作用是根据误差的大小进行调节,积分作用是根据误差的积分值进行调节,微分作用是根据误差的变化率进行调节。
三、BP神经网络的PID控制器设计1.建立神经网络模型:确定输入层节点数、隐藏层节点数和输出层节点数。
2.确定权重和偏置项的初始值:可以使用随机数进行初始化。
3.设置训练样本集:训练样本集包括输入和输出的数据,可以根据实际情况进行设置。
4.确定学习率和训练次数:学习率决定了网络的更新速度,训练次数决定了网络的学习程度。
5.神经网络训练:使用BP算法对神经网络进行训练,通过反向传播算法调整权重和偏置项。
6.测试神经网络性能:使用测试数据对神经网络进行测试,评估其性能是否满足要求。
7.参数调整:根据测试结果对PID控制器的参数进行调整,使得神经网络对系统的控制更加精确。
四、实验结果分析通过对比传统的PID控制器和基于BP神经网络的PID控制器,可以发现基于BP神经网络的PID控制器具有更好的系统控制性能。
因为BP神经网络能够自适应地调整参数,适应非线性复杂系统的控制要求。
总结:基于BP神经网络的PID控制器是一种有效的控制方法,可以提高系统控制的精度和稳定性。
一个基于BP神经网络的PID温度控制系统的研究与实现的开题报告一、研究背景智能控制技术在工业控制、环境监测及自动化控制等领域得到广泛应用。
PID控制器是最常用的控制算法之一,它能够控制系统达到稳态沿及追踪目标。
然而,PID控制器的参数调整是一个复杂的问题,而且容易受到外部干扰的影响。
BP神经网络具有良好的非线性拟合能力,能够适应不同的控制任务。
因此,将BP神经网络应用于PID控制器中,能够实现自适应控制,提高控制精度和稳定性。
本文旨在研究基于BP神经网络的PID温度控制系统,并探讨其在工业实际应用中的可行性和效果。
二、研究内容和方法本研究的主要内容为基于BP神经网络的PID温度控制系统的研究与实现。
具体研究内容包括:1.总体设计和控制策略的制定;2.BP神经网络模型的建立和优化方法的研究;3.基于MATLAB/Simulink的控制系统仿真;4.控制系统在实际工业环境中的应用验证和效果评估。
本研究将采用如下的方法:1.查阅文献,了解PID控制器和BP神经网络的基本理论和应用;2.设计并实现基于BP神经网络的PID温度控制系统,模拟及实验验证;3.对实验数据进行分析和比较,评估BP神经网络PID控制算法在温度控制中的效果和优越性;4.对控制策略和算法进行优化和改进。
三、研究意义和预期成果本研究旨在将BP神经网络技术应用于PID温度控制器中,提高控制系统的自适应性、精度和稳定性,同时提高控制效率和能耗利用率,减少企业的生产成本。
预期成果包括:1.具有自主知识产权的基于BP神经网络的PID温度控制系统;2.控制系统的稳定性和精度优于传统PID控制系统;3.工业实际应用研究,验证控制系统的可行性和有效性。
四、研究进展目前,已完成了相关文献的调研及阅读,并对基于BP神经网络的PID温度控制系统的总体设计和控制策略进行了初步准备。
接下来,将进行BP神经网络模型的建立和优化方法的研究,以及基于MATLAB/Simulink的控制系统仿真。
基于BP 神经网络的自校正PID 控制研究摘 要: 基于反向传播BP 算法的神经网络具有很强的学习能力,适应能力.本文详细叙述了BP 算法的原理,并将改进的BP 神经网络应用在传统的PID 控制中,克服了PID 控制在参数的调整过程中对于系统模型过分依赖的缺点.利用MATLAB 仿真的结果表明基于BP 神经网络的自校正控制能够使传统PID 控制的参数逼近最优达到很好的控制效果. 关键词: BP 算法,神经网络,PID 控制1引言随着科学技术的发展,人们需要加以控制的过程和系统越来越复杂,许多系统具有大型,复杂和强烈非线性的特点.对这些系统进行有效准确的控制就非常的困难.传统的PID 控制是通过对偏差的比例(P),积分(I),微分(D)的线性组合构成控制向量对被控对象进行控制.它算法结构简单,但是,当被控对象具有非线性,时变不确定性和难以建立精确的数学模型时,PID 控制器参数整定不良,性能欠佳,不能达到理想的控制效果.随着人们对神经网络的研究,基于BP 算法的神经网络以其自学习,自适应及逼近任意函数的能力在控制领域得到应用,将BP 神经网络和传统的PID 控制相结合构成的比例,积分,微分神经元控制器,不仅克服了PID 控制的缺陷,而且具有快速的学习能力,快速的适应性,良好的性能和鲁棒性.因此,可以通过神经网络对系统性能的学习来达到最佳的比例,积分,微分组合,实现最佳的PID 控制效果.2 神经网络的BP 算法2.1 神经网络的结构BP 神经网络是控制领域中应用最多的神经网络,它是多层神经元彼此以前馈方式连接组成的网络,网络中没有信号反馈,只有相邻层神经元,每个神经元首先完成输入信号与连接权值的内积计算,然后通过一个非线性函数作用产生输出.BP 神经网络通常由输入层,输出层和若干隐层构成每层由若干个结点组成, 每一个结点表示一个神经元,上层结点与下层结点之间通过权值联接, 同一层结点之间没有联系。
基于BP神经网络的PID优化控制研究【摘要】PID控制要取得较好的控制效果,就必须通过调整好比例、积分和微分三种控制的关系。
本文提出一种基于BP神经网络的PID优化控制的方法,充分利用BP神经网络自学习、自适应、强大的泛化能力,弥补PID控制方法学习,适应能力的不足。
将此方法应用于控制直流电机调速系统,仿真结果表明,此方法能提高系统的控制精度,具有良好的鲁棒性。
【关键词】BP神经网络;PID控制;直流电机调速系统1.引言PID控制以其算法简单,鲁棒性好和可靠性高等优点,广泛地应用于工业生产当中,成为衡量各行各业现代化水平的一个重要标志。
随着科学技术的发展,生产工艺的日益复杂化,生产系统具有非线性,时变不确定性,在实际生产中,常规PID控制器参数往往整定不良、性能欠佳,对运行工况的适应性很差[1]。
BP神经网络具有良好的自学习、自适应能力和鲁棒性,可以用来处理高维、非线性、强耦合和不确定性的复杂控制系统。
本文结合BP神经网络的优点和传统PID控制的优势,对PID控制器进行优化,使其具有很强的自适应性和鲁棒性。
通过对直流电机调速系统仿真,结果表明,这种方法是有效的。
2.PID控制原理PID是工业生产中最常用的一种控制方式,PID调节器是一种线性调节器,它将给定值r(t)与实际输出值c(t)的偏差的比例(P)、积分(I)、微(D)通过线性组合构成控制量,对控制对象进行控制。
传统的PID控制系统原理框图如图2.1所示,系统主要由PID控制器和被控对象组成。
它根据给定值rin(t)与实际输出值yout(t)构成控制偏差额e(t):图2.1为PID控制系统原理框图。
3.基于BP神经网络的PID整定原理PID控制要取得好的控制效果,就必须通过调整好比例、积分和微分三种控制作用在形成控制量中相互配合又相互制约的关系,这种关系不一定是简单的“线性组合”,而是从变化无穷的非线性组合中找出最佳的关系[2]。
BP神经网络具有良好的自学习、自适应能力和鲁棒性,将PID和BP神经网络结合起来,建立参数自学习的PID控制器。
基于BP神经网络优化的PID控制器研究
作者:付子义孙杰
来源:《软件导刊》2015年第12期
摘要:在现代网络控制系统中,数据通信时数据包的丢失,严重影响网络控制系统的稳定性。
针对数据包丢失问题,采用一个满足2-state Gilbert的随机分布变量来描述数据在传输过程中的丢包,进而建立一个随机的、非线性输入模型,设计一种BP神经网络PID控制器,将BP神经网络算法和PID控制器有效结合,实现由BP神经网络整定的最佳PID控制。
仿真验证表明,当网络控制系统的数据丢包率在一定范围时,与传统的PID控制器性能进行对比,BP神经网络PID控制器可以使系统具有更好的控制效果、较好的环境适应力和鲁棒性。
关键词:BP神经网络;PID;数据包丢失;网络控制系统
DOIDOI:10.11907/rjdk.151965
中图分类号:TP393
文献标识码:A 文章编号文章编号:1672-7800(2015)012-0157-04
0 引言
随着科技的发展,网络控制系统NCS(Networked Control System)被广泛应用于现代工业过程控制。
网络控制系统由控制器、传感器和执行器等器件组成,通过通信网络形成一种全分布、网络化实时闭环反馈控制系统。
在网络控制系统中,由于网络通信线路在数据传输过程中存在数据包丢失、传输时间延迟、噪声干扰等问题,控制系统因不能及时、准确接收到数据,致使系统的实时性降低,控制性能欠佳,严重时导致系统瘫痪。
因此,针对网络控制系统中数据包丢失的故障进行研究和改善,具有十分重要的意义和价值[1-4]。
关于网络控制系统中数据包丢失问题,很多专家学者进行了深入的研究。
文献[5-6]将网络控制系统中的数据丢包和传输时延这两个问题同时考虑,统一分析建模,解决网络控制系统中的传输时延和数据丢包问题。
由于网络控制系统在数据传输时存在数据包丢失问题,严重影响系统的稳定性。
通过建模构建一个随机Markov链,并利用Lyapunov稳定性和Markov跳变系统理论,分析闭环系统的稳定性设计控制器,进而解决由于数据丢包带来的系统不稳定性问题[7-8]。
文献[9]针对网络控制中的数据丢包对系统稳定性的影响,采用BP神经网络对系统数据丢包进行预测,并对数据丢包进行补偿;文献[10]针对网络控制系统中采样周期数据丢包率对系统稳定性的影响,通过采用模糊PID控制理论对其进行了全面的分析。
本文针对数据在传输过程中的随机性、离散性、数据包丢失的不确定性,设计了一种BP 神经网络PID控制算法,并用MATLAB仿真平台验证了该控制器对数据丢包的控制效果。
1 数据丢包描述
数据在传输过程中是一个随机离散系统,表示为:
y(k)=x(k)(1)
y(k)=f[x(k-1),u(k-1)](2)
其中y(k)、x(k)分别表示在k时刻系统的输出数据和输入数据,f(·)是一个随机离散非线性函数,k=0,1,2…N[14]。
实际工作中,系统数据丢包的输出状态量为:
y(k)out=y(k)b(k)(3)
其中y(k)out表示系统存在数据丢包时的输出状态量,y(k)表示系统在没有数据丢包时的输出状态量,b(k)∈R且服从Bernoulli分布,值为0、1,满足关系:
prob{b(k)=0}=βprob{b(k)=1}=1-β(4)
其中,β表示数据在传输过程中的丢失率,表示数据在输出过程中的完整率。
通过添加Bernoulli随机数列,使系统的数据采集具有随机性,以提高系统的适应性。
本文采用的被控对象近似数学模型如下:
y(k)=a(k)sin(y(k-1))+1.2u(k-1)(5)
其中系数a(k)是慢时变的。
本文控制器设计目标:在数据传输过程中,对数据包的丢失在一定程度上起到控制作用,使系统有稳定的输出y(k)out。
2 PID控制器设计
2.1 结构设计
PID控制器算法简单、容易实现、鲁棒性好、可靠性高[15],而BP神经网络在大规模并行、分布式存储和处理、自组织、自适应以及自学习方面有明显优势。
本文将BP神经网络和PID控制器相结合,设计了基于BP 神经网络的PID控制器,结构如图1所示,控制器由两部分构成:
(1)经典的PID控制。
直接对被控对象进行闭环控制,并且3个参数kp,ki,kd为在线调整方式。
PID控制器的输入变量:
通过图形(图3、图4、图5、图6)对比,可以看出BP神经网络PID控制器通过神经网络的自学习、加权系数调整、PID参数的自适应调整,对数据包的丢失具有较好的控制效果。
通过图形(图5、图6、图7、图8)对比,可以看出当系统的数据丢包率超过一定程度时,系统开始不稳定,BP神经网络PID控制器已经不能满足系统的控制需求。
由以上的MATLAB仿真结果的对比可以验证:当在网络控制系统中存在数据丢包时,BP 神经网络PID控制器可以在一定程度上对数据丢包进行控制,使系统输出稳定、控制精度提高、鲁棒性增强。
4 结语
针对Bernoulli分布的数据丢包问题,设计了具有数
据丢包的BP神经网络PID控制器,既具有BP神经网络对任意非线性函数逼近的能力,又具有PID控制器算法简单、鲁棒性好、可靠性高等优点。
系统通过对PID参数进行在线自整定和优化,使系统在数据丢包的情况下仍具有较好的控制效果。
仿真验证表明:当系统的数据丢包率在一定的范围内时,基于数据丢包的BP神经网络PID控制器具有很高的控制精度、较强的环境自适应能力和鲁棒性。
参考文献参考文献:
[1] 黎善斌.网络控制系统的研究现状与展望[J].信息与控制,2003,32(3):239-244.
[2] RAJI R S.Smart networks for control[J].IEEE Spectrum,1994,31(6):49-55.
[3] 韩力群.人工神经网络教程[M].北京:北京邮电大学出版社,2006.
[4] 廉洁,陈雨.直接甲醇燃料电池的模糊 PID 控制研究[J].河南理工大学学报:自然科学版,2012,31 (5):584-588.
[5] 王天宝,吴成东,张云洲,等.具有丢包和非均匀分布时延的网络控制器设计[J].东北大学学报:自然科学版, 2012,34(2):157-161.
[6] 付子义,张艺.具有数据丢包的神经网络PID控制器[J].计算机仿真, 2014 (5):419-422, 431.
[7] 陈孟伟,陈孟伟,金朝永,等.基于随机丢包的网络控制系统控制器设计[J].广东工业大学学报,2012 (2):85-88.
[8] 张鹤,崔宝同.具有随机数据包丢失的网络控制系统[J].江南大学学报:自然科学版,2012,11(1):43-46.
[9] 刘鑫.神经网络在网络丢包预测中的应用[J].渤海大学学报:自然科学版,2012,33(3):248-254.
[10] 冯冬青.模糊PID在网络控制系统中的仿真研究[J].自动化仪表,2013,34(1):61-68.
[11] YAN SONG, JINGCHENG WANG, YUANHAO SHI.Packet-loss-dependent stabilization of NCSs with network-induced delay and packet dropout[J].Journal of Systems Engineering and Electronics,2012,23(3):408-413.
[12] 陈海霞,孙书利.具有有限连续丢包网络控制系统的最优线性估值器[J].控制理论与应用, 2012,29(10):1317-1324.
[13] 王新,徐娟.基于小波包神经网络的级联式变频器故障诊断仿真研究[J].河南理工大学学报:自然科学版,2012, 31 (6):706-711.
[14] 邬春学.NCS中数据传输丢包与控制方法[J].微计算机信息,2005,10(21):39-41.
[15] 游科友,谢立华.网络控制系统的最新研究综述[J].自动化学报,2013, 39(2):101-118.
(责任编辑:杜能钢)。