理论力学课后习题答案1-13章
- 格式:doc
- 大小:5.90 MB
- 文档页数:40

理论力学第2版(唐国兴王永廉主编)课后答案理论力学第2版内容简介第2版前言第1版前言第一章静力学基础知识要点解题方法难题解析习题解答第二章平面汇交力系知识要点解题方法难题解析习题解答第三章力矩、力偶与平面力偶系知识要点解题方法习题解答第四章平面任意力系知识要点解题方法难题解析习题解答第五章空间力系知识要点解题方法习题解答第六章静力学专题知识要点解题方法习题解答第七章点的运动学知识要点解题方法难题解析习题解答第八章刚体的基本运动知识要点解题方法习题解答第九章点的合成运动知识要点解题方法难题解析习题解答第十章刚体的平面运动知识要点解题方法难题解析习题解答第十一章质点动力学基本方程知识要点解题方法难题解析第十二章动量定理知识要点解题方法难题解析习题解答第十三章动量矩定理知识要点解题方法难题解析习题解答第十四章动能定理知识要点解题方法难题解析习题解答第十五章动静法知识要点解题方法习题解答参考文献理论力学第2版目录机械工业出版社本书是与唐国兴、王永廉主编的《理论力学》(第2版)配套的教学与学习指导书。
本书按主教材的章节顺序编写,每章分为知识要点、解题方法、难题解析与习题解答四个部分。
其中,“知识要点”部分提纲挈领地对该章的基本概念、基本理论和基本公式进行归纳总结,以方便读者复习、记忆和查询;“解题方法”部分深入细致地介绍解题思路、解题方法和解题技巧,以提高读者分析问题和解决问题的能力;“难题解析”部分精选若干在主教材的例题与习题中没有涉及的典型难题进行深入分析,以拓展读者视野,满足读者深入学习的需要;“习题解答”部分对主教材中该章的全部习题均给出求解思路和答案,但不提供详细解题过程,以期在帮助读者自主学习和练习的同时为他们留出适量的思考空间。
本书继承了主教材的风格特点,结构严谨、层次分明、语言精练、通俗易懂。
本书虽与主教材配套,但其结构体系完整,亦可单独使用。
本书可作为应用型本科院校与民办二级学院工科各专业学生的.学习和应试指导书,同样适合高职高专、自学自考和成人教育的学生使用,对考研者、教师和工程技术人员也是一本很好的参考书。

理论力学课后习题答案理论力学课后习题答案引言:理论力学是物理学的基础课程之一,对于理解和应用物理学的原理和方法具有重要意义。
在学习理论力学的过程中,课后习题是巩固知识、提高能力的重要途径。
本文将针对理论力学课后习题进行解答,帮助读者更好地理解和掌握这门课程。
第一章:牛顿力学1. 一个物体以初速度v0沿直线运动,加速度为a,求物体的位移与时间的关系。
答:根据牛顿第二定律F=ma,可得物体所受合力F=ma=mv/t,其中m为物体的质量,v为物体的速度,t为时间。
由此可得物体的位移s=vt+1/2at^2。
2. 一个质点在重力作用下自由下落,求它在t时刻的速度和位移。
答:在重力作用下,质点的加速度为g,即a=g。
根据牛顿第二定律F=ma,可得质点所受合力F=mg。
根据牛顿第一定律,质点的速度随时间的变化率为v=g*t,位移随时间的变化率为s=1/2gt^2。
第二章:拉格朗日力学1. 一个质点沿半径为R的圆周运动,求它的动能和势能。
答:质点的动能由动能定理可得,即K=1/2mv^2,其中m为质点的质量,v为质点的速度。
质点的势能由引力势能可得,即U=-GmM/R,其中G为引力常数,M为圆周的质量。
2. 一个质点在势能为U(r)的力场中运动,求它的运动方程。
答:根据拉格朗日方程可得,质点的运动方程为d/dt(dL/dv)-dL/dr=0,其中L=T-U,T为质点的动能,U为质点的势能。
第三章:哈密顿力学1. 一个质点在势能为U(x)的力场中运动,求它的哈密顿量和哈密顿运动方程。
答:质点的哈密顿量由哈密顿定理可得,即H=T+U,其中T为质点的动能,U为质点的势能。
质点的哈密顿运动方程为dp/dt=-dH/dx,其中p为质点的动量。
2. 一个质点在势能为U(x)的力场中运动,求它的哈密顿正则方程。
答:质点的哈密顿正则方程为dx/dt=dH/dp,dp/dt=-dH/dx,其中x为质点的位置,p为质点的动量。
结论:通过对理论力学课后习题的解答,我们可以更深入地理解和应用物理学的原理和方法。
第一章静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
()2.在理论力学中只研究力的外效应。
()3.两端用光滑铰链连接的构件是二力构件。
()4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
()5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
()6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
()7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
()8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
()二、选择题1.若作用在A点的两个大小不等的力F1和F2,沿同一直线但方向相反。
则其合力可以表示为。
①F1-F2;②F2-F1;③F1+F2;2.作用在一个刚体上的两个力F A、F B,满足F A=-F B的条件,则该二力可能是。
①作用力和反作用力或一对平衡的力;②一对平衡的力或一个力偶。
③一对平衡的力或一个力和一个力偶;④作用力和反作用力或一个力偶。
3.三力平衡定理是。
①共面不平行的三个力互相平衡必汇交于一点;②共面三力若平衡,必汇交于一点;③三力汇交于一点,则这三个力必互相平衡。
4.已知F1、F2、F3、F4为作用于刚体上的平面共点力系,其力矢关系如图所示为平行四边形,由此。
①力系可合成为一个力偶;②力系可合成为一个力;③力系简化为一个力和一个力偶;④力系的合力为零,力系平衡。
5.在下述原理、法则、定理中,只适用于刚体的有。
①二力平衡原理;②力的平行四边形法则;③加减平衡力系原理;④力的可传性原理;⑤作用与反作用定理。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是。
2.已知力F沿直线AB作用,其中一个分力的作用与AB成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为度。

第零章 数学准备一 泰勒展开式 1 二项式的展开()()()()()m23m m-1m m-1m-2f x 1x 1mx+x x 23=+=+++!!2 一般函数的展开()()()()()()()()230000000f x f x f x f x f x x-x x-x x-x 123!''''''=++++!!特别:00x =时, ()()()()()23f 0f 0f 0f x f 0123!x x x ''''''=++++!!3 二元函数的展开(x=y=0处)()()00f f f x y f 0x+y x y ⎛⎫∂∂=++ ⎪∂∂⎝⎭,22222000221f f f x 2xy+y 2x x y y ⎛⎫∂∂∂++ ⎪ ⎪∂∂∂∂⎝⎭!评注:以上方法多用于近似处理与平衡态处的非线性问题向线>性问题的转化。
在理论力问题的简单处理中,一般只需近似到三阶以内。
二 常微分方程1 一阶非齐次常微分方程: ()()x x y+P y=Q通解:()()()P x dx P x dx y e c Q x e dx -⎛⎫⎰⎰=+ ⎪⎝⎭⎰注:()()(),P x dxP x dx Q x e dx ⎰±⎰⎰积分时不带任意常数,()x Q 可为常数。
2 一个特殊二阶微分方程2y A y B =-+ 通解:()02B y=K cos Ax+Aθ+注:0,K θ为由初始条件决定的常量 3 ,4 二阶非齐次常微分方程 ()x y ay by f ++=通解:*y y y =+;y 为对应齐次方程的特解,*y 为非齐次方程的一个特解。
非齐次方程的一个特解 (1) 对应齐次方程0y ay by ++=设x y e λ=得特征方程2a b 0λλ++=。
解出特解为1λ,2λ。
*若12R λλ≠∈则1x 1y e λ=,2x 2y e λ=;12x x 12y c e c e λλ=+*若12R λλ=∈则1x 1y e λ=,1x 2y xe λ=; 1x 12y e (c xc )λ=+*若12i λαβ=±则x 1y e cos x αβ=,x 2y e sin x αβ=;x 12y e (c cos x c sin x)αββ=+(2) "(3) 若()2000x f a x b x c =++为二次多项式*b 0≠时,可设*2y Ax Bx C =++ *b 0≠时,可设*32y Ax Bx Cx D =+++注:以上1c ,2c ,A,B,C,D 均为常数,由初始条件决定。

理论力学第二版习题答案理论力学第二版习题答案理论力学是力学的基础学科,它研究物体在力的作用下的运动规律。
对于学习理论力学的学生来说,做习题是非常重要的一部分,通过做习题可以巩固理论知识,提高解题能力。
本文将为大家提供理论力学第二版习题的答案,希望对广大学生有所帮助。
第一章:牛顿力学的基本概念和基本定律1. 问题:一个质点从速度为v0的位置自由下落,求它下落的时间。
答案:根据自由下落的运动学公式,下落的时间t可以通过以下公式计算:t =√(2h/g),其中h为下落的高度,g为重力加速度。
由于自由下落是垂直向下的,所以h可以表示为h = (1/2)gt^2。
将h代入上述公式,可得t = √(2h/g) =√(2(1/2)gt^2/g) = √t^2 = t。
2. 问题:一个质点在水平方向上以初速度v0做匀速直线运动,求它在时间t内所走的距离。
答案:由于匀速直线运动的速度保持不变,所以在时间t内,质点所走的距离s 可以通过以下公式计算:s = v0t。
第二章:质点的运动方程1. 问题:一个质点在x轴上做直线运动,其运动方程为x = 2t^2 + 3t + 1,求其速度和加速度。
答案:质点的速度可以通过对运动方程求导得到:v = dx/dt = 4t + 3。
质点的加速度可以通过对速度求导得到:a = dv/dt = 4。
2. 问题:一个质点在y轴上做直线运动,其运动方程为y = 3t^3 + 2t^2 + t,求其速度和加速度。
答案:质点的速度可以通过对运动方程求导得到:v = dy/dt = 9t^2 + 4t + 1。
质点的加速度可以通过对速度求导得到:a = dv/dt = 18t + 4。
第三章:质点系和刚体的运动1. 问题:一个质点系由两个质点组成,质点1质量为m1,质点2质量为m2,它们之间通过一根质量可忽略不计的绳子连接,求质点系的重心位置。
答案:质点系的重心位置可以通过以下公式计算:x = (m1x1 + m2x2)/(m1 + m2),其中x1和x2分别为质点1和质点2的位置坐标。
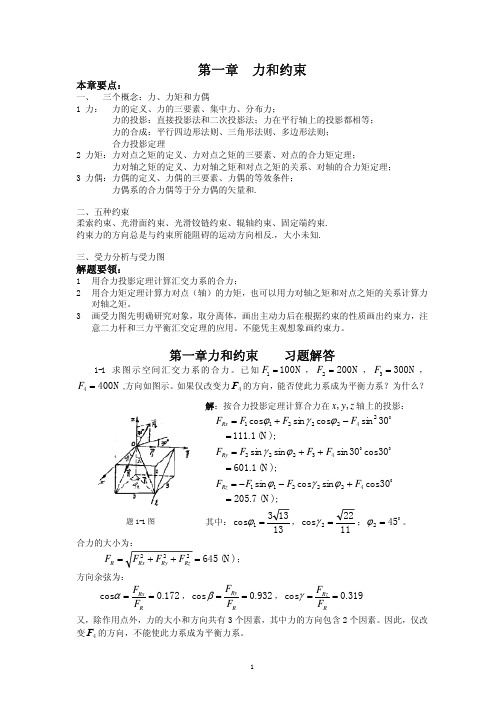
目录第一章质点力学 (2)第二章质点组力学 (56)第三章刚体力学 (74)第四章转动参考系 (105)第五章分析力学 (115)第一章 质点力学1.1 由题可知示意图如题1.1.1图:{{SSt t 题1.1.1图设开始计时的时刻速度为0v ,由题可知枪弹作匀减速运动设减速度大小为a . 则有:()()⎪⎪⎩⎪⎪⎨⎧+-+=-=221210211021221t t a t t v s at t v s 由以上两式得11021at t s v +=再由此式得()()2121122t t t t t t s a +-=证明完毕.1.2 解 由题可知,以灯塔为坐标原点建立直角坐标如题1.2.1图.题1.2.1图设A 船经过0t 小时向东经过灯塔,则向北行驶的B 船经过⎪⎭⎫ ⎝⎛+2110t 小时经过灯塔任意时刻A 船的坐标()t t x A 15150--=,0=A yB 船坐标0=B x ,⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛+-=t t y B 15211150则AB 船间距离的平方()()222B A B A y y x x d -+-=即()2021515t t d -=201521115⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛++t t()20202211225225675900450⎪⎭⎫ ⎝⎛++++-=t t tt t2d 对时间t 求导()()67590090002+-=t t dtd d AB 船相距最近,即()02=dtdd ,所以h t t 430=- 即午后45分钟时两船相距最近最近距离22min231543154315⎪⎭⎫ ⎝⎛⨯-⨯+⎪⎭⎫ ⎝⎛⨯=s km1.3 解 ()1如题1.3.2图第1.3题图y题1.3.2图由题分析可知,点C 的坐标为⎩⎨⎧=+=ψψϕsin cos cos a y a r x 又由于在∆AOB 中,有ϕψsin 2sin ar =(正弦定理)所以ry r a 2sin 2sin ==ψϕ联立以上各式运用1cos sin 22=+ϕϕ由此可得rya x r a x 22cos cos --=-=ψϕ得12422222222=---++r y a x y a x r y 得22222223y a x r a x y -=-++化简整理可得()()2222222234r a y x y a x -++=-此即为C 点的轨道方程.(2)要求C 点的速度,分别求导⎪⎪⎩⎪⎪⎨⎧=--=2cos sin cos 2cos sin ϕωψψϕωϕωr y r r x 其中ϕω = 又因为ψϕsin 2sin a r =对两边分别求导 故有ψϕωψcos 2cos a r =所以22y x V +=4cos sin cos 2cos sin 2222ϕωψψϕωϕωr r r +⎪⎪⎭⎫ ⎝⎛--= ()ψϕψϕϕψω++=sin cos sin 4cos cos 22r1.4 解 如题1.4.1图所示,A BOCLxθd 第1.4题图OL 绕O 点以匀角速度转动,C 在AB 上滑动,因此C 点有一个垂直杆的速度分量22x d OC v +=⨯=⊥ωωC 点速度dx d d v v v 222sec sec cos +====⊥⊥ωθωθθ 又因为ωθ= 所以C点加速度 θθθω ⋅⋅⋅⋅==tan sec sec 2d dt dv a ()2222222tan sec 2d x d x d +==ωθθω1.5 解 由题可知,变加速度表示为⎪⎭⎫ ⎝⎛-=T t c a 2sin 1π 由加速度的微分形式我们可知dtdv a =代入得dtT t c dv ⎪⎭⎫ ⎝⎛-=2sin 1π 对等式两边同时积分dt T t c dv t v⎰⎰⎪⎭⎫ ⎝⎛-=002sin 1π可得 :D Ttc Tct v ++=2cos2ππ(D 为常数)代入初始条件:0=t 时,0=v ,故c TD π2-=即⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=12cos2T t T t c v ππ 又因为dtds v =所以=ds dt T t T t c ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+12cos2ππ 对等式两边同时积分,可得:⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=t T t T T t c s 2sin 22212πππ1.6 解 由题可知质点的位矢速度r λ=//v ①沿垂直于位矢速度μθ=⊥v又因为 r r λ== //v , 即r rλ=μθθ==⊥r v 即rμθθ= ()()j i v a θ r dtd r dt d dt d +==(取位矢方向i ,垂直位矢方向j ) 所以()j i i i θ r rdtd r i dt r d r dt d +=+=()dtd r dt d r dt dr r dt d j j j j θθθθ ++=i j j 2r r r θθθ -+= 故()()j i a θθθ r r r r22++-= 即 沿位矢方向加速度()2θ r ra -= 垂直位矢方向加速度()θθr r a 2+=⊥ 对③求导r rr 2λλ== 对④求导θμμθθr rr +-=2⎪⎭⎫⎝⎛+=λμμθr 把③④⑦⑧代入⑤⑥式中可得rr a 222//θμλ-= ⎪⎭⎫ ⎝⎛+=⊥r a μλμθ1.7 解 由题可知⎩⎨⎧==θθsin cos r y r x ①②对①求导θθθ sin cos r r x-= ③ 对③求导2 ④对②求导θθθcos sin r r y+=⑤ 对⑤求导θθθθθθθsin cos cos 2sin 2 r r r ry -++=⑥ 对于加速度a ,我们有如下关系见题1.7.1图题1.7.1图即⎩⎨⎧+=+=θθθθθθcos sin sin cos a a y a a x r r⑦--⑧ 对⑦⑧俩式分别作如下处理:⑦θcos ⨯,⑧θsin ⨯ 即得⎩⎨⎧+=-=θθθθθθθθθθcos sin sin sin cos sin cos cos a a y a a x r r⑨--⑩ ⑨+⑩得θθsin cos yx a r += ⑾ 把④⑥代入 ⑾得2θr r a r -= 同理可得θθθ r r a 2+= 1.8解 以焦点F 为坐标原点,运动如题1.8.1图所示]题1.8.1图则M 点坐标⎩⎨⎧==θθsin cos r y r x 对y x ,两式分别求导⎪⎩⎪⎨⎧+=-=θθθθθθcos sin sin cos r r yr r x 故()()22222cos sin sin cos θθθθθθ r r r r y xv ++-=+=222ωr r+= 如图所示的椭圆的极坐标表示法为()θcos 112e e a r +-=对r 求导可得(利用ωθ= )又因为()()221cos 111e a e e a r -+-=θ即()rer e a --=21cos θ 所以()()2222222221211cos 1sin e r e ar r e a --+--=-=θθ故有()2222224222sin 1ωθωr e a r e v +-=()2224221ea r e -=ω()()]1211[2222222e r e ar r ea --+--22ωr +()()⎥⎦⎤⎢⎣⎡--+-⋅-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω 即()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)1.9证 质点作平面运动,设速度表达式为j i v y x v v +=令为位矢与轴正向的夹角,所以dt d v dt dv dt d v dt dv dt d y y x x j j i i v a +++==j i ⎪⎪⎭⎫ ⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x y y x v dt dv v dt dv 所以[]j i a ⎪⎪⎭⎫⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x yy x v dt dv v dt dv ()j i y x v v +⋅ θθ y x y y y x x x v v dt dv v v v dt dv v ++-=dtdv v dt dv v y yxx += 又因为速率保持为常数,即C C v v y x ,22=+为常数对等式两边求导022=+dtdv v dt dv v y y xx所以0=⋅v a即速度矢量与加速度矢量正交.1.10解 由题可知运动轨迹如题1.10.1图所示,题1.10.1图则质点切向加速度dtdv a t =法向加速度ρ2n v a =,而且有关系式ρ2v 2k dt dv -= ①又因为()232y 1y 1'+''=ρ②2px y 2=所以yp y =' ③ 32yp y -='' ④ 联立①②③④2322322y p 1y p 2kv dtdv⎪⎪⎭⎫ ⎝⎛+-= ⑤又dydv ydt dy dy dv dt dv =⋅=把2px y 2=两边对时间求导得pyy x= 又因为222y xv += 所以22221py v y+= ⑥ 把⑥代入⑤23223222122121⎪⎪⎭⎫ ⎝⎛+⋅-=⋅⎪⎪⎭⎫ ⎝⎛+y p y p kv dydvp y v既可化为222py dykp v dv +-= 对等式两边积分222py dykp v dv p p vu+-=⎰⎰- 所以πk ue v -=1.11解 由题可知速度和加速度有关系如图1.11.1所示题1.11.1图⎪⎪⎩⎪⎪⎨⎧====ααcos sin 2a dt dv a a r v a t n 两式相比得dtdvr v ⋅=ααcos 1sin 2 即2cot 1vdv dt r =α 对等式两边分别积分200cot 1v dv dt rv v t⎰⎰=α 即αcot 11rtv v -=此即质点的速度随时间而变化的规律.1.12证 由题1.11可知质点运动有关系式⎪⎪⎩⎪⎪⎨⎧==ααcos sin 2a dtdv a r v ①② 所以 ωθθθd dv dt d d dv dt dv =⋅=,联立①②,有ααωθcos sin 2r v d dv = 又因为r v ω=所以 θαd vdv cot =,对等式两边分别积分,利用初始条件0=t 时,0θθ=()αθθcot 00-=e v v1.13 证(a )当00=v ,即空气相对地面上静止的,有牵相绝v v v +=.式中绝v 质点相对静止参考系的绝对速度, 相v 指向点运动参考系的速度, 牵v 指运动参考系相对静止参考系的速度.可知飞机相对地面参考系速度:绝v =v ',即飞机在舰作匀速直线运动.所以飞机来回飞行的总时间v l t '=20. (b )假定空气速度向东,则当飞机向东飞行时速度01v v v +'=飞行时间1v v lt +'=当飞机向西飞行时速度0v v v v v -'=+=牵相飞行时间2v v lt -'=故来回飞行时间021v v l t t t +'=+=0v v l -'+222v v lv -''= 即2200220112v v t v v v lt '-='-'= 同理可证,当空气速度向西时,来回飞行时间2201v v t t '-=(c )假定空气速度向北.由速度矢量关系如题1.13.1图v 题1.13.1图v v v '+=0绝202v v v -'= 所以来回飞行的总时间222vv l t -'=2200220112v vt v v v l '-='-'=同理可证空气速度向南时,来回飞行总时间仍为2201v v t t '-=1.14解 正方形如题1.14.1图。
理论力学教科书课后习题及解析第一章偶,大小是260Nm,转向是逆时针。
.求图示平面力系的合成结果,长度单位为m1习题4-习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
A点的矩是:(1) 解:平行力系对O(1) 解:取点为简化中心,求平面力系的主矢:B取点为简化中心,平行力系的主矢是:求平面力系对点的主矩:O 点的主矩是:B 平行力系对B RB向点简化的结果是一个力,且:M和一个力偶合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力(2) B.理论力学教科书课后习题及解析A,且:M向A点简化的结果是一个力如图所示;R和一个力偶A如图所示;将,使满足:d R向下平移一段距离B的大小等于载荷分布的其几何意义是:。
R最后简化为一个力R,大小等于R B,使满足:d R将向右平移一段距离A矩形面积,作用点通过矩形的形心。
A(2) 取点为简化中心,平行力系的主矢是:的大小等于载荷分布的R。
其几何意义是:RR最后简化为一个力,大小等于A三角形面积,作用点通过三角形的形心。
点的主矩是:A平行力系对.理论力学教科书课后习题及解析列平衡方程:。
.求下列各梁和刚架的支座反力,长度单位为习题4-4m解方程组:反力的实际方向如图示。
校核:解:(1) 研究AB杆,受力分析,画受力图:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:理论力学教科书课后习题及解析(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:列平衡方程:反力的实际方向如图示。
校核:解方程组:结果正确。
.理论力学教科书课后习题及解析反力的实际方向如图示。
校核:结果正确。
的约束反力A.重物悬挂如图,已知习题4-5G=1.8kN,其他重量不计;求铰链和杆BC所受的力。
列平衡方程:解方程组:BC是二力杆),画受力图:研究整体,受力分析((1) 解:反力的实际方向如图示。