月球卫星轨道高度长期保持的轨道维持策略
- 格式:pdf
- 大小:504.26 KB
- 文档页数:7
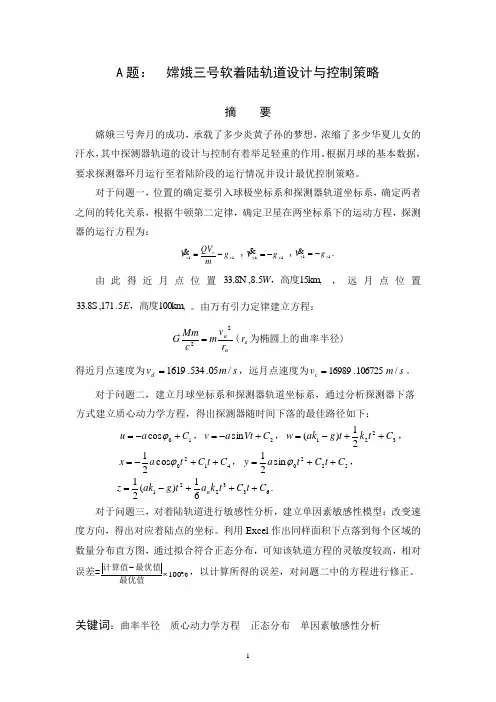
A 题: 嫦娥三号软着陆轨道设计与控制策略摘 要嫦娥三号奔月的成功,承载了多少炎黄子孙的梦想,浓缩了多少华夏儿女的汗水,其中探测器轨道的设计与控制有着举足轻重的作用。
根据月球的基本数据,要求探测器环月运行至着陆阶段的运行情况并设计最优控制策略。
对于问题一,位置的确定要引入球极坐标系和探测器轨道坐标系,确定两者之间的转化关系,根据牛顿第二定律,确定卫星在两坐标系下的运动方程,探测器的运行方程为:11x r x g mQV V -= ,11y y g V -= ,11z z g V -= . 由此得近月点位置15km,5.8,33.8N ,高度W ,远月点位置100km,5.171,33.8S ,高度E 。
由万有引力定律建立方程: a a r v m cMmG 22=(a r 为椭圆上的曲率半径)得近月点速度为s m v d /05.534.1619=,远月点速度为s m v c /106725.16989=。
对于问题二,建立月球坐标系和探测器轨道坐标系,通过分析探测器下落 方式建立质心动力学方程,得出探测器随时间下落的最佳路径如下: 10cos C a u +-=ϕ,2sin C Vt a v +-=,322121)(C t k t g ak w ++-=, 4120cos 21C t C t a x ++-=ϕ,5220sin 21C t C t a y ++=ϕ,63322161)(21C t C t k a t g ak z n +++-=.对于问题三,对着陆轨道进行敏感性分析,建立单因素敏感性模型:改变速度方向,得出对应着陆点的坐标。
利用Excel 作出同样面积下点落到每个区域的数量分布直方图,通过拟合符合正态分布,可知该轨道方程的灵敏度较高,相对误差=%100⨯-最优值最优值计算值,以计算所得的误差,对问题二中的方程进行修正。
关键词:曲率半径 质心动力学方程 正态分布 单因素敏感性分析一问题的重述嫦娥三号在着陆准备轨道上的运行质量为 2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
行星轨道如何维持稳定在浩瀚的宇宙中,行星们围绕着恒星有条不紊地运行,它们的轨道看似永恒不变,但实际上是由一系列复杂而精妙的因素共同作用来维持稳定的。
这就如同一场精妙绝伦的宇宙舞蹈,每个参与者都遵循着特定的规则,共同演绎着这出宏大的剧目。
首先,我们要明白的是引力的作用。
引力是维系行星在其轨道上运行的最关键力量。
就像地球围绕太阳公转,太阳的巨大引力如同一只无形的大手,牢牢地抓住地球,使其不至于飞离出去。
而行星自身也具有一定的速度,这个速度与引力之间形成了一种微妙的平衡。
如果行星的速度太慢,它就会被太阳的引力拉过去,最终坠毁在太阳上;反之,如果速度太快,它就会挣脱太阳的引力束缚,飞向茫茫宇宙深处。
这种平衡是如何实现的呢?想象一下,当你用力扔出一个球时,如果扔出的力量过小,球很快就会落回地面;如果力量过大,球就会飞得很远。
而行星的公转速度就像是恰到好处的“扔球力量”,使得行星既不会被恒星吸进去,也不会逃脱出去。
这个速度被称为“环绕速度”,对于每一颗行星来说,它与所围绕恒星的质量以及与恒星的距离都有关系。
恒星质量越大,引力越强,行星需要更快的速度才能保持在轨道上;而距离恒星越远,引力相对较弱,行星所需的速度也就相对较低。
除了引力和速度的平衡,行星之间的相互作用也对轨道的稳定性产生影响。
太阳系中不止一颗行星,它们在各自的轨道上运行时,彼此之间也会产生微弱的引力拉扯。
比如,木星是太阳系中最大的行星,它的引力对其他行星的轨道就有着不可忽视的影响。
这种相互作用有时会导致行星轨道的微小变化,但在大多数情况下,这些变化是在一定范围内的,不会使行星的轨道变得混乱。
另外,太阳系中的其他天体,如小行星、彗星等,虽然它们的质量相对较小,但在与行星相遇时,也可能会对行星的轨道产生微小的扰动。
不过,由于这些天体的数量众多,它们的影响相互抵消,总体上不会对行星轨道的稳定性造成太大的威胁。
再来说说太阳系所在的银河系环境。
银河系中存在着大量的恒星和其他天体,它们产生的引力场也会对太阳系中的行星轨道产生极其微弱的影响。
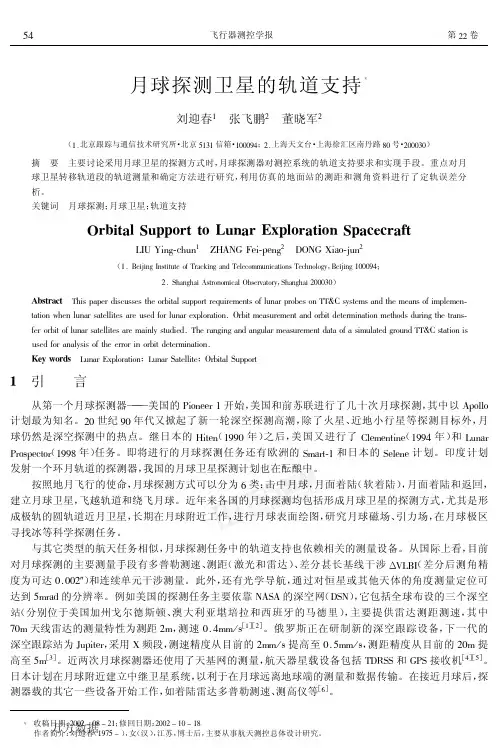
长期在轨运行卫星的轨道维持技术
长期在轨运行卫星的轨道维持技术
本文研究近地轨道卫星长期在轨运行的轨道维持问题.轨道维持的任务是将卫星的星下点轨迹保持在设计的参考轨迹附近.近地轨道卫星所受的摄动力包括地球引力摄动、日月摄动、大气阻力摄动和光压摄动等,而影响卫星轨道星下点漂移的主要因素是大气阻力摄动.本文给出了一种新的卫星轨道维持策略,数学仿真表明了其有效性.
作者:谌颖何英姿韩冬 Chen Ying He Yingzi Han Dong 作者单位:北京控制工程研究所空间智能控制技术国家级重点实验室,北京,100080 刊名:航天控制ISTIC PKU英文刊名:AEROSPACE CONTROL 年,卷(期):2006 24(3) 分类号:V4 关键词:轨道维持星下点轨迹轨道漂移。
海上卫星发射场的长期可持续性策略海上卫星发射场是未来航天发展的重要趋势之一,它的长期可持续性策略是确保其稳定运行和持续发展的关键。
为了实现长期可持续性,海上卫星发射场需要考虑以下几个方面:环境友好性、资源利用效率、安全保障以及管理与合作。
首先,海上卫星发射场的长期可持续性策略必须注重环境友好性。
在选择发射场的位置时,需要考虑到生态环境的保护,避免对海洋生态系统造成破坏。
同时,发射场需要采用先进的环保技术和设备,减少废气、废水和固体废弃物的排放。
通过科学、合理的管理,减少对海洋环境的负面影响,实现可持续发展。
其次,资源利用效率是海上卫星发射场长期可持续性策略的另一个重要方面。
海上卫星发射场应该优化资源利用,减少能源消耗和资源浪费。
例如,采用可再生能源供电系统,如太阳能、风能等,减少对传统能源的依赖。
同时,通过优化发射计划和加强协调管理,提高卫星发射的效率,充分利用有限的资源,确保长期可持续性。
第三,安全保障是海上卫星发射场长期可持续性策略的重要保证。
海上卫星发射涉及到高风险的活动,如燃料储备、卫星装载和发射等。
因此,必须建立严格的安全管理体系,确保所有的操作符合标准和规范,最大程度地降低事故风险。
同时,进行持续的安全培训和演习,提高员工的安全意识,有效地应对突发事件,保障卫星发射的安全性。
最后,管理与合作是海上卫星发射场长期可持续性策略不可或缺的方面。
海上卫星发射场应积极开展国际间的合作交流,共享资源、技术和经验。
通过合作,可以提高卫星发射的效率和安全性,降低成本,并促进航天产业的发展。
同时,科学、规范的管理体系也是实现长期可持续性的关键。
建立完善的管理机构和流程,提高工作效率和运营水平,确保卫星发射场的可持续发展。
综上所述,海上卫星发射场的长期可持续性策略需要考虑环境友好性、资源利用效率、安全保障以及管理与合作。
通过保护环境、优化资源利用、强化安全管理和加强合作交流,海上卫星发射场可以实现可持续发展,并为航天事业做出积极贡献。
嫦娥三号软着陆轨道设计与控制策略摘要月球软着陆是月球探测中的一项关键技术。
软着陆轨道设计与控制策略也成为技术的重要环节。
本文主要基于嫦娥三号在月球软着陆过程中着陆准备轨道、主减速段、快速调整段、粗避障段、精避障段以及缓速下降阶段6个阶段进行研究,从而确定着陆轨道和最优控制策略。
对于问题一,本文将题目简化为从离月球表面1500米到300米位置,嫦娥三号作匀减速运动。
通过其受到的月球引力以及在300米处对应的经纬度计算其动力方程和几何方程,得到近月点的位置:︒30N,高度离月球表面19W,︒5.51.15km,速度为1.7km/s,俯仰姿态角︒160E,︒5.30S,.6984。
远月点所在位置为:︒高度离月球表面100km,速度为1.62km/s,俯仰姿态角︒84。
对于问题二,将软着陆轨道离散化,利用离散点处状态连续作为约束条件,将常推力软着陆轨道转化为多参数问题,利用二次规划确定着陆轨道。
并通过仿真分析得到嫦娥三号在着陆轨道中月心距、法向速度、切向速度和随时间的变化曲线。
本文在确定嫦娥三号软着陆的6个阶段策略为:在主减速制导阶段将推进剂消耗优化作为主要设计目标,另外还要兼顾工程可实现性要求;在快速调整阶段提出利用推力大小和方向线性变化的制导率;在粗避障制导阶段提出一种多项式制导算法,满足了速度,姿态等多项约束;在精避障制导阶段,采用位置和速度的平面控制相结合的方式制导;在缓速下降阶段将着陆安全性以、陆月面的速度以及姿态控制精度作为主要控制因素。
对于问题三,在考虑设备测量误差和执行机构误差后,本文关于误差的分析均采用蒙特卡罗打靶方案。
根据变推力方案推算着陆位置误差、嫦娥三号关机高度和径向着陆速度、软着陆全过程纵向和横向着陆速度误差分布图。
关键词:匀减速运动离散化二次规划蒙特卡罗打靶一、问题的背景嫦娥三号将在北京时间12月14号在月球表面实施软着陆。
嫦娥三号如何实现软着陆以及能否成功成为外界关注焦点。
嫦娥三号软着陆轨道设计与控制策略引言嫦娥三号是中国国家航天局于2013年发射的一颗月球探测器,是继嫦娥一号和嫦娥二号之后的一次新的月球探测任务。
嫦娥三号的软着陆任务是该探测器的主要任务之一,为了成功完成软着陆,需要设计合理的轨道和采取适当的控制策略。
本文将介绍嫦娥三号软着陆轨道设计与控制策略的相关内容。
轨道设计软着陆任务的轨道设计是非常关键的一部分,主要目标是使探测器能够安全地降落在预定的着陆点附近。
以下是嫦娥三号软着陆轨道设计的几个关键要点:初始轨道嫦娥三号在发射后进入地月转移轨道,然后通过月球捕获进入月球轨道。
根据探测器的设计和任务需求,在进入月球轨道后,会通过一系列轨道调整来使探测器逐渐接近预定的着陆点。
着陆区域选择着陆区域的选择是轨道设计的关键一步。
根据对月球表面的地形和气象条件的分析,选择了一个相对平坦且没有大型障碍物的区域作为着陆点的候选区。
在进一步的分析和评估后,最终确定了嫦娥三号的着陆点。
轨道调整为了使探测器能够准确着陆在预定的着陆点附近,需要进行轨道调整。
根据着陆点与当前轨道的相对位置和速度,通过发动机喷射和航天器姿态调整,逐渐调整探测器的轨道,使其进一步接近预定的着陆点。
着陆点验证在探测器接近着陆点之前,需要进行着陆点验证。
这一步骤涉及探测器的高度、速度、姿态等多个参数的实时监测和控制。
通过与地面的通信和数据传输,控制中心可以对探测器的状态进行监测,并根据实时数据对轨道进行微调,以确保探测器能够准确着陆在预定的着陆点附近。
控制策略为了使嫦娥三号能够实现软着陆,需要采取适当的控制策略。
以下是嫦娥三号软着陆的主要控制策略:六自由度控制嫦娥三号在整个软着陆过程中,需要进行六自由度控制,即控制飞行器在三个方向上的平移运动和三个方向上的旋转姿态。
通过控制发动机的推力和调整航天器的姿态,可以实现对飞行器的六自由度运动的控制。
引力偏航在探测器接近月球表面时,月球的引力将会对探测器产生摄动。
载人登月周期重访轨道保持策略设计
贺波勇;李海阳;李飞;沈红新
【期刊名称】《载人航天》
【年(卷),期】2016(022)004
【摘要】针对高精度星历动力学模型下载人登月周期重访轨道(也称地月循环轨道)发散问题,设计了一种轨道保持控制策略。
提出一种高精度星历动力学模型下的循环轨道初值设计方法,分析了日月中心引力、地球J2项等摄动力对轨道快速发散作用,设计了一种特殊点四脉冲周期重访轨道保持策略。
高精度动力学数值仿真实验表明,该种轨道保持策略控制频率低、速度增量消耗小,控制精度能够满足任务需求,达到预期设计目标。
【总页数】6页(P411-416)
【作者】贺波勇;李海阳;李飞;沈红新
【作者单位】国防科学技术大学航天科学与工程学院,长沙410073;国防科学技术大学航天科学与工程学院,长沙410073;国防科学技术大学航天科学与工程学院,长沙410073;西安卫星测控中心,西安710043
【正文语种】中文
【中图分类】V412
【相关文献】
1.载人登月自由返回轨道与Hybrid轨道设计方法 [J], 白玉铸;陈小前;李京浩
2.基于地月周期重访轨道空间站的载人月球探测方案设想 [J], 杨雷;向开恒;童科伟;
闵学龙
3.环月轨道交会的载人登月任务轨道与窗口规划 [J], 贺波勇;曹鹏飞;罗亚中;李海阳
4.环月轨道交会的载人登月任务轨道与窗口规划 [J], 贺波勇;曹鹏飞;罗亚中;李海阳;
5.基于多重近似重访周期的火星-太阳同步回归轨道设计 [J], 杜部致;高飞;张序琦;贾晓
因版权原因,仅展示原文概要,查看原文内容请购买。
V ol. 16 N o. 6 航天器工程第16 卷第6 期16 SPA CECR AF T EN GIN EERIN G嫦娥一号月球探测卫星轨道设计杨维廉周文艳( 北京空间飞行器总体设计部, 北京100094)2007 年11 月摘要嫦娥一号卫星航天使命的主要科学目标是对月球及月地空间进行多种遥感探测, 航天使命设计的主要和基本的部分是卫星飞行轨道的设计, 其中包括在飞行过程中的轨道控制策略的设计。
嫦娥一号的这条飞行轨道由三大部分组成: 第一部分是绕地飞行的调相轨道, 它们由周期为16h、24h、48h 的三段轨道组成; 第二部分是关键的地月转移轨道; 第三部分是200km 高度绕月飞行的使命轨道。
文章给出了整个飞行轨道的设计思想。
关键词月球探测调相轨道地月转移轨道使命轨道轨道控制中图分类号: V4741 3 文献标识码: A 文章编号: 1673- 8748( 2007) 06- 0016- 09Orbit Design for Lunar Exploration Satellite CE- 1YANG Weilian ZH OU Weny an( Beijing Inst itut e of Spacecraf t Syst em Eng ineer ing, Beijing 100094, China)Abstract: CE- 1 is t he f irst Chinese pr obe t o ex plore the Mo on. T he m ain scient if ic object ives ofthis mission are remo te sensing of t he mo on and t he cislunar environment invest igat ions. T he pr-im ar y and basic part of the mission design is t he o rbit desig n of w hole f lig ht process, including theorbit cont rol st rat eg y. T he f light co nsist s of t hr ee seg ment s. T he first is phasing o rbit s segm entw hich includes t hr ee orbits w ith periods of 16, 24 and 48 hours; T he second is t ranslunar- t rajecto-r y being key part of t he f light . T he last segm ent is a mission orbit which is cir cular one w it h alt -it ude o f 200km and inclination of 90 degr ee t o lunar equat or.Key words: lunar explorat ion; phasing orbit ; t ranslunar- t rajecto ry; mission or bit ; orbit cont rol超GT O 轨道, 轨道周期为151 81h。
航天器的轨道保持与控制技术当我们仰望星空,想象着那些在太空中穿梭的航天器时,可能很少有人会想到,要让它们在预定的轨道上稳定运行,并准确地完成各种任务,背后需要依靠一系列复杂而精妙的轨道保持与控制技术。
这些技术就像是无形的大手,精准地掌控着航天器的每一次飞行轨迹,确保它们能够安全、高效地完成使命。
首先,让我们来了解一下什么是航天器的轨道。
简单来说,航天器的轨道就是它在太空中飞行的路径。
这个路径受到多种因素的影响,比如地球的引力、太阳的引力、月球的引力,甚至是大气阻力等。
为了让航天器能够按照我们的期望在太空中运行,就需要对它的轨道进行精确的计算和设计。
在轨道保持方面,航天器面临着诸多挑战。
其中一个重要的因素就是大气阻力。
当航天器在近地轨道运行时,尽管太空环境看似真空,但仍然存在着极其稀薄的大气。
这些稀薄的大气会对航天器产生阻力,导致它的速度逐渐降低,轨道高度也随之下降。
如果不加以控制,航天器最终可能会坠入大气层烧毁。
为了克服这个问题,航天器通常会配备推进系统,定期进行轨道提升,以保持在预定的轨道高度上。
除了大气阻力,太阳活动也会对航天器的轨道产生影响。
太阳会不断地释放出高能粒子和电磁辐射,这些都会对航天器的轨道产生微小但不可忽视的干扰。
例如,在太阳活动高峰期,太阳的磁场会发生变化,从而影响地球周围的引力场,导致航天器的轨道发生偏移。
为了应对这种情况,地面控制中心会密切监测太阳活动,并根据预测的结果及时调整航天器的轨道。
在控制航天器的轨道时,精确的测量和计算是至关重要的。
地面测控站会通过各种手段,如雷达、光学望远镜等,对航天器的位置、速度和姿态进行测量。
这些测量数据会被传输回地面控制中心,经过复杂的计算和分析,制定出相应的轨道控制策略。
然后,地面控制中心会向航天器发送指令,控制其推进系统的工作,实现轨道的调整。
推进系统是实现轨道控制的关键部件。
目前,航天器常用的推进系统包括化学推进系统和电推进系统。
化学推进系统具有推力大、响应快的优点,但燃料消耗较大,适用于短时间内需要较大推力的轨道调整。
嫦娥三号软着陆轨道设计与控制策略
嫦娥三号软着陆轨道设计与控制策略主要包括以下几个方面:
1. 软着陆轨道设计:软着陆轨道的设计需要考虑月球表面
地形、重力场和空间作业的要求。
首先,设计轨道需要确
保探测器能够顺利进入月球附近的轨道,进而实施软着陆。
其次,为了使探测器能够顺利降落,轨道还需要考虑月球
引力和空气动力学效应对探测器轨道的影响。
最后,软着
陆轨道的设计还需要考虑将来返回地球的任务,包括能量
消耗和轨道调整等问题。
2. 控制策略:软着陆任务中的控制策略主要包括推力控制、轨道调整和姿态控制等方面。
推力控制主要用于改变探测
器的速度和轨道。
轨道调整主要用于修正轨道的偏差,使
探测器能够精确地着陆。
姿态控制主要用于控制探测器在
着陆过程中的姿态,使其保持稳定并能够准确降落。
3. 轨道测控技术:嫦娥三号软着陆任务需要使用测控技术
对探测器进行实时监测和控制。
测控技术包括测量探测器
的位置、速度和姿态等参数,同时还需要进行数据处理和
指令传输等操作。
通过轨道测控技术,可以及时对软着陆
过程进行监测和调整,确保探测器能够准确地实施软着陆。
总的来说,嫦娥三号软着陆轨道设计与控制策略需要综合
考虑轨道动力学、月球引力和地形、轨道调整和姿态控制
等因素,通过合理的设计和控制策略,使探测器能够准确
地着陆并顺利完成任务。
月球卫星的一种轨道维持控制策略
随着我国月球探测技术的不断进步,设立月球卫星已经成为实现我国航空航天事业的
重要目标之一。
针对月球卫星轨道维持控制的问题,本文提出了一种有效的控制策略,该
策略通过引入惯性轮和电动助推器组合控制系统对月球卫星的轨道进行优化控制,可以提
高控制精度和抗干扰性能,同时降低系统复杂性和成本。
具体而言,在该控制策略中,惯性轮和电动助推器共同作用于月球卫星的动力学特性,实现对卫星轨道的优化控制。
其中,电动助推器主要用于提供轨道增量力,修正卫星轨道
偏差;而惯性轮则可通过转动惯量的变化来实现轨道姿态的调整。
控制器使用的是复合
PID控制器,该控制器可以实现对轨道位置和速度的精确控制,并且具有较强的抗干扰能力。
为了验证该控制策略的有效性,本文进行了数值仿真实验。
实验结果表明,相比传统
控制方法,基于惯性轮和电动助推器组合控制的月球卫星轨道维持控制策略在控制精度和
抗干扰性能方面都有了明显的提高,具有更好的工程应用前景。
精心整理2013高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)我2.3.日期:2014年9月12日赛区评阅编号(由赛区组委会评阅前进行编号):2013高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):嫦娥三号软着陆轨道设计和控制策略摘要嫦娥三号着陆器实现了我国首次地外天体软着陆任务,着陆器的制导、导航与控制系统是最重要的分系统之一。
为了保证着陆的高安全性,对动力下降过程中的制导、导航、避障和姿态控制都提出了很高的要求,因此需要对软着陆轨道进行精确的计算。
针对问题一,本文建立了天体卫星环绕模型,嫦娥三号绕月飞行轨道为椭圆,利GMd用模型公式2度。
最终,在距离月面4米处自由落体,用时2.213s,到达着陆点的速度3.61m/s.全过程用时746.5s,嫦娥三号探测器总质量2.4t,消耗燃料1293.35kg,占总质量的53.91%。
针对问题三,本文对各个阶段都进行仔细的误差分析和敏感性分析,分析了每一阶段中可能产生误差的各个因素以及对轨道影响最敏感的因素。
通过对影响因素的深入计算,得出如何去减少误差,做到对轨道更精确的控制。
关键字:天体卫星环绕模型非线性规划哈密顿函数最优化一、问题重述随着科技的发展,我国航天事业也有了长足的发展和全新的突破,尤其是神舟五号飞船的成功发射,标志着我国航天史上一座新的里程碑诞生,是我国人民攀登世界科技高峰的又一个伟大壮举,它表明我国在航天技术方面已经走在了世界前列。
2013年12月2日1时30分嫦娥三号的成功发射又实现了在我国航天史上新的突破,此次对月球的造访历时四天,于12月6日抵达月球轨道。
嫦娥三号在着陆准备轨道上的运行质量为 2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
嫦娥三号软着陆轨道设计与控制策略摘要要使嫦娥三号能够准确着陆,着陆轨道与控制策略的设计尤为重要。
着陆过程须满足要求满足每个阶段在关键点所处的状态,同时还要尽量使着陆过程所消耗的燃料达到最小从而设计出最优控制策略。
针对问题一,由开普勒三大定律推出卫星的空间坐标系公式,进而运用到计算近月点和远月点的位置上。
再运用开普勒第三定律和守恒定律求解得出近月点和远月点相应位置的速度大小。
从而计算得出近地点的坐标为(93.20,1686.78,-582.98),远月点的坐标为(1485.02,-445.35,-522.30),速度分别是1.708/km s 和1.613/km s,方向分别为对应点的轨道切线方向。
针对问题二,对于任意时刻都可以将速度和所受的推力分解到水平方向和竖直方向上,所以也可以得到水平方向和竖直方向的合力。
假定嫦娥三号到达所要求的高度时,恰好达到相应的速度。
只针对每一个阶段的最后时刻进行分析,可以得到关于该时刻的速度、加速度、时间、剩余质量的关系,因为这些变量均与速度和推力与水平方向、竖直方向的夹角有关。
计算可得第五阶段的剩余质量处于924~1842kg针对问题三, 由相关资料,结合问题二所得的方程组的参量,可知误差的来源主要是测量得的比冲,月球的重力,嫦娥三号离开近月点时与水平方向的夹角,离开近月点时的速度。
采用单因素敏感性分析法,先对第四阶段结束时,它剩余质量m和第三阶段末速度、推力夹角三个因素进行敏感性分析,求解的敏感系数分别为1、10、0.84,所以第三阶段末速度为敏感因素。
由于各个阶段末速度均受上一阶段的速度影响,同理对各阶段末速度进行敏感性分析,最终计算出,整个软着陆阶段的敏感因素为月球的重力、第三阶段推力方向、单位时间消耗燃料的质量。
关键词:轨道设计、优化控制、开普勒第三定律、能量守恒定律、单因素敏感性分析1.问题重述与分析1.1 问题重述:嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软着陆,关键问题是着陆轨道与控制策略的设计。
卫星飞行轨道的周期性调整与维持技术随着航天科技的快速发展,卫星已经成为现代通信、导航、气象等领域不可或缺的重要设备。
卫星在轨飞行的稳定性对于其正常运行和功能的发挥至关重要。
为了保持卫星的轨道精确和稳定,科学家们提出了周期性调整和维持技术。
本文将介绍卫星飞行轨道的周期性调整与维持技术,并探讨其在卫星运行中的重要性。
一、卫星飞行轨道调整的需求正常情况下,卫星的飞行轨道应该是一个稳定的椭圆轨道。
然而,由于地球引力、太阳引力、月球引力以及其他星球的引力等因素的影响,卫星轨道会逐渐发生变化,导致卫星偏离预定轨道。
这些偏差不仅会影响卫星的通信、导航和观测等功能,还会增加卫星的能耗并缩短其寿命。
因此,周期性调整和维持卫星的飞行轨道成为了必要之举。
二、卫星飞行轨道周期性调整技术为了实现卫星飞行轨道的周期性调整,科学家们开发了多种技术和方法。
下面将介绍其中几种常见的技术。
1. 推力系统调整:推力系统调整是最常见的卫星轨道调整技术之一。
通过卫星上的推力系统提供的推力,可以控制和调整卫星的速度和方向,从而使卫星回到预定的飞行轨道。
2. 太阳帆调整:太阳帆是一种利用太阳光的辐射压力来调整卫星飞行轨道的技术。
通过展开或收起太阳帆,可以改变卫星受到的辐射压力,从而对卫星的速度和方向进行微调。
3. 天线姿态调整:卫星上的天线姿态调整系统可以通过改变卫星的姿态来改变其轨道。
通过调整卫星的天线的朝向和位置,可以产生微弱的姿态力矩,从而实现卫星轨道的微调。
4. 大气阻力控制:卫星在轨道上会受到大气层的阻力影响,而阻力则会导致卫星轨道发生变化。
科学家们通过控制卫星的姿态和速度,可以减小大气阻力对卫星轨道的影响,从而实现轨道的稳定性和周期性调整。
三、卫星飞行轨道维持技术除了周期性调整卫星飞行轨道,科学家们还开发了维持卫星轨道的技术。
这些技术旨在保持卫星的轨道稳定,使其能够长时间地保持在预定轨道上。
1. 卫星姿态控制:卫星姿态控制是维持卫星轨道稳定的关键技术之一。
嫦娥三号软着陆轨道设计与控制策略摘要在世界各国纷纷制定和实施“重返月球”的战略计划之际,我国的月球探测工程的展开,对于积极参与到月球资源的开发、维护我国对月球的权益,进而促进我国航天技术的创新与发展有着重要的意义。
问题要求我们对嫦娥三号软着陆轨道与控制策略进行最优化设计。
按照问题的要求,本文从以下三个方面进行了研究。
针对问题一,在合理的假设基础上,利用物理理论知识、解析几何知识、微元法,且构建月心坐标系与舱体坐标系,利用坐标系之间的转换,结合最优控制策略,确定了近月点和远月点的位置。
且嫦娥三号绕月球的轨道是由圆形轨道变为椭圆形轨道,借助开普勒定律、能量守恒定律求解出近月点的速度。
又因为我们建立了舱体坐标系,所以速度的方向也就求出来了。
针对问题二,针对问题三,关键词:坐标系转换极大值原理显式制导律非线性规划一、问题重述1.1引言。
1.2问题的提出(1)确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与方向。
(2)确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
(3)对于你们设计的着陆轨道和控制策略做相应的误差分析和敏感性分析。
二、问题分析问题一:问题要我们求着陆准备轨道近月点和远月点的位置,以及相应位置的速度大小与方向。
首先我们要明确如何在月球上表示两个点的位置?速度的方向我们又应该如何表达?考虑到题目已给出我们一个着陆点19.51W,44.12N,所以我们选择在月球上建立一个坐标系,再做一系列减小误差的措施,故上述问题就解决了。
至于速度的计算,显然会与第二问的最优策略有关,我们通过对最优控制策略的计算,逆推就能算得近月点与远月点的速度。
问题二:问题要我们确定嫦娥三号的着陆轨道和在六个阶段的最优控制策略,嫦娥三号沿着陆准备轨道下降到距离月面一定高度时,嫦娥三号发动机点火工作,开始动力下降段。
这个阶段的主要任务在于消除嫦娥三号速度的水平分量。
由于着陆器在月面上软着陆只能依靠制动发动机的能量来实现,因此,在这一过程中,如何使能量最省成为所研究的关键问题,一般从以下两个方面考虑:一方面是制动火箭开始工作时机的选择;另一方面是在设计动力下降段的制导控制策略时,要在末端轨道参数满足下一阶段要求的前提下,根据燃料消耗最小的原则进行设计。
卫星发射后如何对其进行轨道调整和维护当卫星成功发射进入太空后,它的使命才刚刚开始。
为了确保卫星能够在预定的轨道上稳定运行,并完成各种任务,对其进行轨道调整和维护是至关重要的。
这不仅需要高度精确的技术和复杂的计算,还需要对太空环境的深入了解以及对卫星系统的精细控制。
首先,我们来谈谈为什么要进行轨道调整。
卫星发射时,虽然经过了精心的计算和规划,但实际的发射过程中仍可能存在各种偏差和不确定性。
例如,火箭的推力可能会有微小的变化,大气阻力的影响也可能与预期不同,这些因素都可能导致卫星进入的轨道与设计轨道存在一定的偏差。
此外,随着时间的推移,由于地球引力场的不均匀性、太阳和月球的引力作用以及大气阻力等因素,卫星的轨道也会逐渐发生变化。
如果不进行及时的调整,卫星可能会偏离预定的工作轨道,无法正常执行任务,甚至可能会坠入大气层而坠毁。
那么,如何进行轨道调整呢?这通常需要借助卫星自身携带的推进系统。
推进系统可以是化学燃料推进器,也可以是电推进系统。
化学燃料推进器能够提供较大的推力,适用于较大幅度的轨道调整;而电推进系统则具有更高的效率和更长的工作寿命,适用于微小的轨道调整和长期的轨道维持。
在进行轨道调整之前,地面控制中心的工作人员会通过一系列的测量手段,获取卫星的精确轨道参数。
这些测量手段包括利用地面雷达、光学望远镜等设备进行观测,以及接收卫星自身发送的遥测数据。
通过对这些数据的分析和处理,计算出卫星当前的轨道状态与预定轨道之间的偏差。
然后,根据计算结果,制定出详细的轨道调整方案。
轨道调整的过程就像是一场精心策划的太空舞蹈。
地面控制中心会向卫星发送指令,启动推进系统,使其产生特定方向和大小的推力。
这个推力会改变卫星的速度和方向,从而使其逐渐进入预定的轨道。
在这个过程中,需要对推力的大小、作用时间和方向进行精确的控制,稍有偏差就可能导致调整失败。
除了轨道调整,轨道维护也是一项长期而重要的工作。
在卫星的运行过程中,由于各种因素的影响,其轨道会不断发生微小的变化。